
Applying Process-Based Models for Subsurface Flow Treatment Wetlands: Recent Developments and Challenges


Abstract
:1. Introduction
- correlation models that correlate influent and effluent concentration,
- first-order rate equations, and
- more sophisticated correlation models, such as artificial neural networks and fuzzy logic models.
- The water flow model:Different types of TWs require different models to describe water flow. In subsurface flow (SSF) wetlands, water flows either horizontally or vertically through the porous filter media whereby no free water level is visible. HF wetlands can be simulated when only saturated water flow conditions are considered. For modelling vertical flow (VF) wetlands with intermittent loading, transient variably saturated flow models are required. The intermittent loading makes VF wetlands highly dynamic and makes modelling these systems even more complex. Models applicable to VF wetlands use either the Richards equation or various simplified approaches to describe variably saturated flow [5].
- The transport model:Wastewaters contain particulate and solute compounds that are transported with the flowing water. The transport model generally considers convective-dispersive transport in the liquid phase, diffusion in the gaseous phase, as well as adsorption and desorption processes between the solid and liquid phases.
- The biokinetic model:Biokinetic models describe the transformation and degradation processes of the pollutants. The complexity of biokinetic models ranges from considering a single process affecting the concentration of one compound to multiple processes affecting multiple compounds. The reaction rates are often assumed to be constant, i.e., independent of environmental conditions. However, reaction rates are dependent on a number of environmental conditions (e.g., concentrations of oxygen, substrate and nutrients). These dependencies are often modelled with Monod-type equations.
- The plant model:Plants are an essential part of wetland treatment systems and thus plant related processes have to be included in wetland models. Root growth influences the water flow pattern in the subsurface, and via evapotranspiration the water balance. During growth and decay, plants take up nutrients and release organic matter and nutrients, respectively. Additionally, some plants release substances via roots (e.g., oxygen and/or specific organic substances). Plant models describe uptake and release of substances either associated with water uptake or as a process dependent on concentration gradients.
- The clogging model:Clogging models for SSF wetlands need to be able to describe transport and deposition of suspended particulate matter and processes that reduce the hydraulic capacity/conductivity of the filter medium (i.e., reduction of free pore volume due to deposition of particulate matter, bacterial and plant growth). This is important for simulations of the long-term TWs performance and predictions of the potential failure of TWs due to clogging [6].
2. Materials and Methods
2.1. Process-Based Models for Treatment Wetlands
- BIO_PORE [8] implemented in the COMSOL MultiphysicsTM platform.
2.2. The HYDRUS Wetland Module
- TWs treating greywater [31], and
3. Results and Discussion
3.1. Simulation Results for Vertical Flow Wetlands Treating Domestic Wastewater
3.2. Experiences and Challenges Using Process-Based Wetland Models
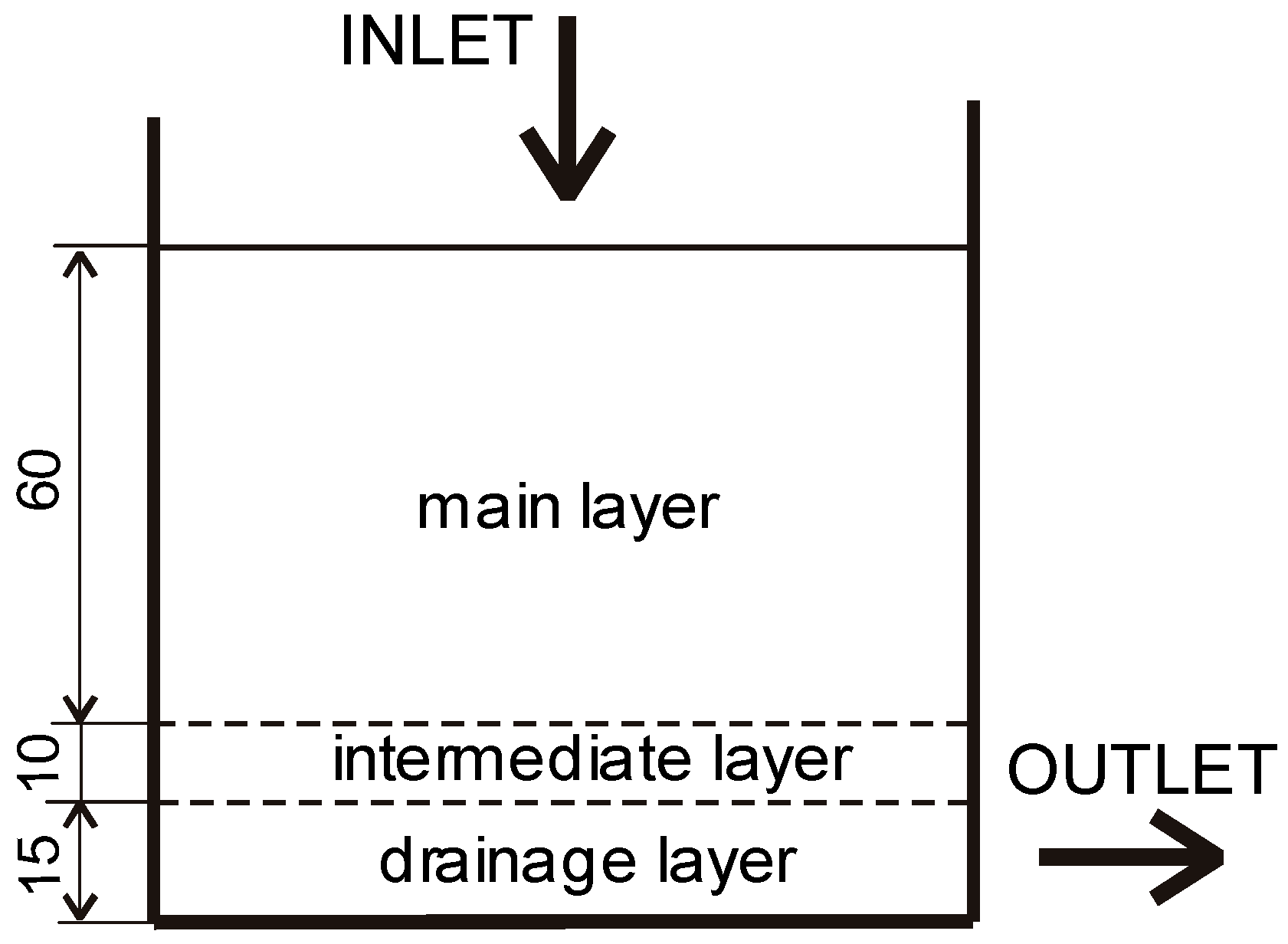
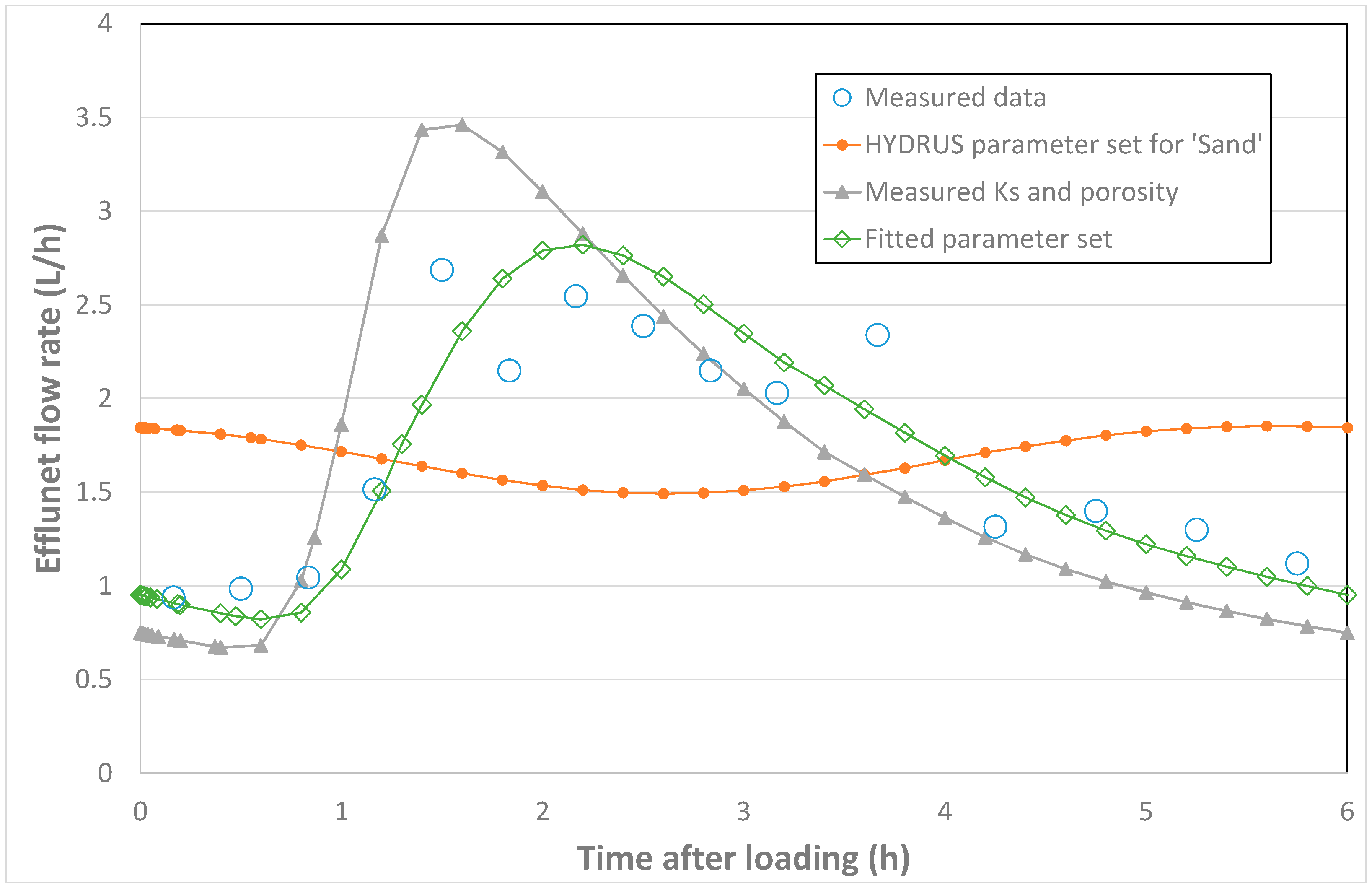
3.2.1. Water Flow Model
3.2.2. Transport Model
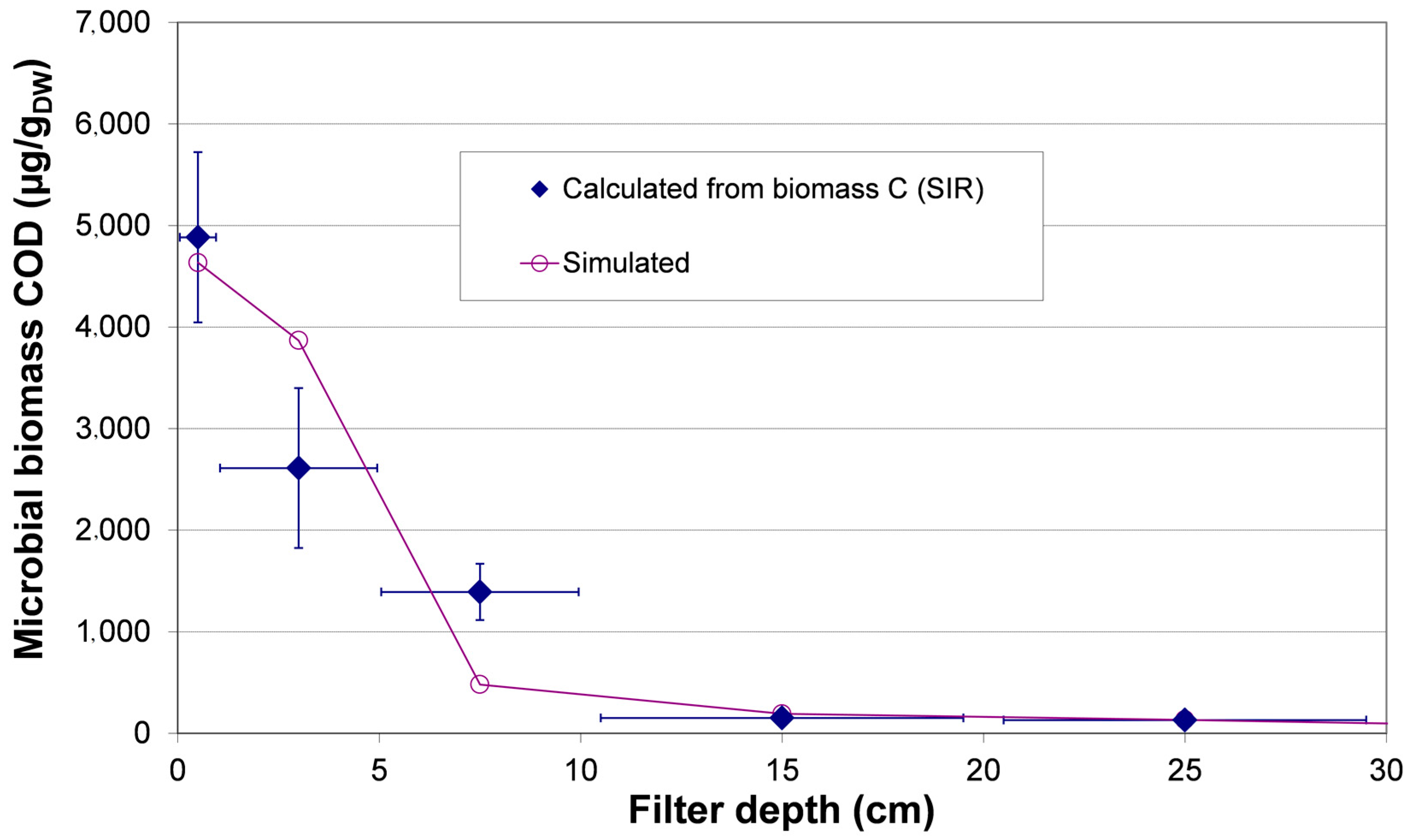
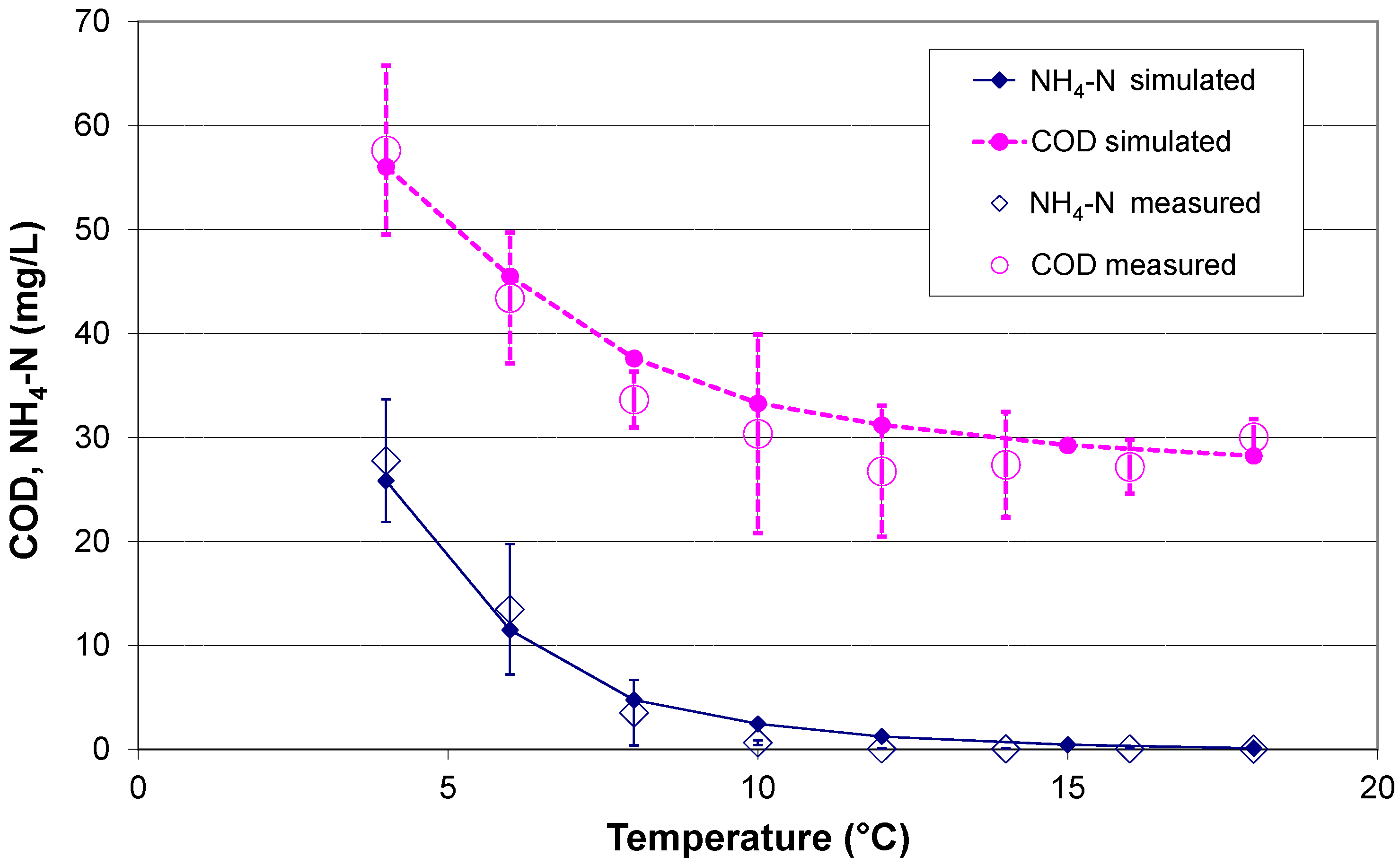
3.2.3. Biokinetic Model
3.2.4. Plant Model
3.2.5. Clogging Model
3.2.6. Wetland Models as Design Tools
- could be used when having knowledge about a TW design, but without requiring special knowledge about numerical modelling,
- allows the design of TWs for different boundary conditions (such as different climatic conditions, wastewater characterization, filter material, etc.), and
- makes the description of the dynamic behaviour of the designed TW possible, thus allowing the higher robustness of wetland treatment systems, for example, for fluctuating inflows and peak loads.
4. Conclusions
- Process-based models are a powerful tool for understanding the processes in treatment wetlands in more detail.
- All sub-models required to describe the different processes in treatment wetlands are important.
- –
- Good calibration of the water flow model is a pre-requisite for achieving a good match between measured and simulated pollutant concentrations. Due to the intermittent loading, more data are required for VF wetlands compared to HF wetlands. If the water flow model is calibrated, good results can be obtained in most applications when using the standard parameter sets of the biokinetic CW2D and CWM1 biokinetic models [7].
- –
- A good description of solute transport in the porous media is of equal importance for good simulation results for pollutant degradation and removal. To be able to model realistic solute transport behaviour, it is advised to carry tracer experiments. Adsorption and desorption is an important process for several parameters (such as ammonia and phosphate), especially when reactive filter media are used.
- –
- Influent fractionation (i.e., fractionation of influent COD and the N and P contents of different COD fractions) has a high impact on simulation results and thus is an essential part of calibrating reactive transport models. This is especially true when simulating wetlands treating other than domestic wastewater. Parameters of the biokinetic model should be changed only after a good calibration of the water flow and transport models has been achieved and after the effect of the influent fractionation on simulation results has been considered.
- –
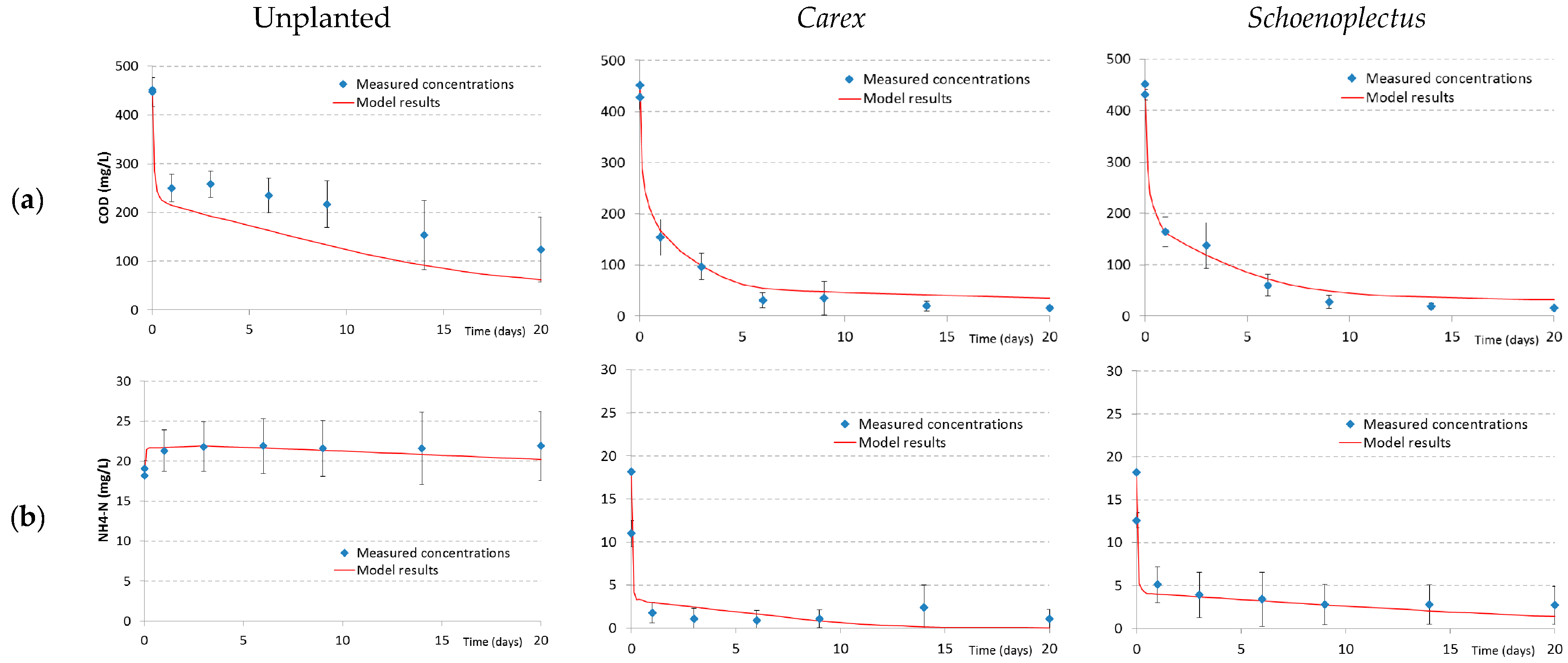
- Simulating the influence of wetland plants is possible by considering uptake and release via the plant roots linked to evapotranspiration. Modelling the effect of plants on the treatment performance has been shown to be most important for HF wetland and batch-operated systems and less important for VF wetlands.
- –
- Models describing clogging are important to describe the long-term behaviour of treatment wetlands. Up to now, clogging models are the least established and tested among the sub-models mentioned. Further research is needed to get better reliability in clogging model predictions.
- One of the main obstacles for the wider use of available simulation tools is that they are rather complicated and difficult to run. Simplified, yet robust and reliable models for the design of treatment wetlands, need to be developed (such as RSF_Sim, developed to support the design of treatment wetlands treating combined sewer overflow [55]).
Conflicts of Interest
References
- Kadlec, R.H.; Wallace, S. Treatment Wetlands, 2nd ed.; CRC Press: Boca Raton, FL, USA, 2009. [Google Scholar]
- García, J.; Rousseau, D.P.L.; Morató, J.; Lesage, E.; Matamoros, V.; Bayona, J.M. Contaminant Removal Processes in Subsurface-Flow Constructed Wetlands: A Review. Crit. Rev. Environ. Sci. Technol. 2010, 40, 561–661. [Google Scholar] [CrossRef]
- Langergraber, G. Numerical modelling: A tool for better constructed wetland design? Water Sci. Technol. 2011, 64, 14–21. [Google Scholar] [CrossRef] [PubMed]
- Langergraber, G.; Rousseau, D.; García, J.; Mena, J. CWM1—A general model to describe biokinetic processes in subsurface flow constructed wetlands. Water Sci. Technol. 2009, 59, 1687–1697. [Google Scholar] [CrossRef] [PubMed]
- Langergraber, G. Modeling of processes in subsurface flow constructed wetlands—A review. Vadose Zone J. 2008, 7, 830–842. [Google Scholar] [CrossRef]
- Langergraber, G.; Morvannou, A. Modelling of Treatment Wetlands. Sustain. Sanit. Pract. 2014, 18, 31–36. [Google Scholar]
- Langergraber, G.; Šimůnek, J. Reactive Transport Modeling of Subsurface Flow Constructed Wetlands Using the HYDRUS Wetland Module. Vadose Zone J. 2012, 11, 460. [Google Scholar] [CrossRef]
- Samsó, R.; Garcia, J. BIO PORE, a mathematical model to simulate biofilm growth and water quality improvement in porous media: Application and calibration for constructed wetlands. Ecol. Eng. 2013, 54, 116–127. [Google Scholar] [CrossRef]
- Langergraber, G.; Giraldi, D.; Mena, J.; Meyer, D.; Peña, M.; Toscano, A.; Brovelli, A.; Korkusuz, E.A. Recent developments in numerical modelling of subsurface flow constructed wetlands. Sci. Total Environ. 2009, 407, 3931–3943. [Google Scholar] [CrossRef] [PubMed]
- Kumar, J.L.G.; Zhao, Y.Q. A review on numerous modeling approaches for effective, economical and ecological treatment wetlands. J. Environ. Manag. 2011, 92, 400–406. [Google Scholar] [CrossRef] [PubMed]
- Meyer, D.; Chazarenc, F.; Claveau-Mallet, D.; Dittmer, U.; Forquet, N.; Molle, P.; Morvannou, A.; Pálfy, T.; Petitjean, A.; Rizzo, A.; et al. Modelling constructed wetlands: Scopes and aims—A comparative review. Ecol. Eng. 2015, 80, 205–213. [Google Scholar] [CrossRef]
- Samsó, R.; Meyer, D.; García, J. Subsurface Flow Constructed Wetland Models: Review and Prospects. In The Role of Natural and Constructed Wetlands in Nutrient Cycling and Retention on the Landscape; Vymazal, J., Ed.; Springer: Cham, Switzerland, 2015; pp. 149–174. [Google Scholar]
- Šimůnek, J.; Šejna, M.; van Genuchten, M.T. The HYDRUS Software Package for Simulating the Two- and Three-Dimensional Movement of Water, Heat, and Multiple Solutes in Variably-Saturated Media. In Technical Manual, version 2.0; PC-Progress: Prague, Czech Republic, 2011; p. 254. [Google Scholar]
- Langergraber, G.; Šimůnek, J. Modeling variably-saturated water flow and multi-component reactive transport in constructed wetlands. Vadose Zone J. 2005, 4, 924–938. [Google Scholar] [CrossRef]
- Šimůnek, J.; van Genuchten, M.T.; Šejna, M. Development and applications of the HYDRUS and STANMOD software packages and related codes. Vadose Zone J. 2008, 7, 587–600. [Google Scholar] [CrossRef]
- Langergraber, G. Simulation of subsurface flow constructed wetlands—Results and further research needs. Water Sci. Technol. 2003, 48, 157–166. [Google Scholar] [PubMed]
- Langergraber, G. Simulation of the treatment performance of outdoor subsurface flow constructed wetlands in temperate climates. Sci. Total Environ. 2007, 380, 210–219. [Google Scholar] [CrossRef] [PubMed]
- Langergraber, G.; Tietz, A.; Haberl, R. Comparison of measured and simulated distribution of microbial biomass in subsurface vertical flow constructed wetlands. Water Sci. Technol. 2007, 56, 233–240. [Google Scholar] [CrossRef] [PubMed]
- Hochfeldt, V. Numerical Simulation of a Full-Scale Two-Stage Constructed Wetland System. Master’s Thesis, University of Applied Sciences Ostwestfahlen-Lippe, Höxter, Germany, 2016. [Google Scholar]
- Pucher, B.; Ruiz, H.; Paing, J.; Chazarenc, F.; Molle, P.; Langergraber, G. Using simulation of a one stage vertical flow constructed wetland to determine filter depth of a zeolite layer to improve the treatment performance. Water Sci. Technol. 2016. submitted. [Google Scholar]
- Dittmer, U.; Meyer, D.; Langergraber, G. Simulation of a Subsurface Vertical Flow Constructed Wetland for CSO Treatment. Water Sci. Technol. 2005, 51, 225–232. [Google Scholar] [PubMed]
- Henrichs, M.; Langergraber, G.; Uhl, M. Modelling of organic matter degradation in constructed wetlands for treatment of combined sewer overflow. Sci. Total Environ. 2007, 380, 196–209. [Google Scholar] [CrossRef] [PubMed]
- Henrichs, M.; Welker, A.; Uhl, M. Modelling of biofilters for ammonium reduction in combined sewer overflow. Water Sci. Technol. 2009, 60, 825–831. [Google Scholar] [CrossRef] [PubMed]
- Meyer, D. Modellierung und Simulation von Retentionsbodenfiltern zur weitergehenden Mischwasserbehandlung (Modelling and Simulation of Constructed Wetlands for Treatment of Combined Sewer Overflow). Ph.D. Thesis, Technical University of Kaiserslautern, Kaiserslautern, Germany, 2011. Available online: https://kluedo.ub.uni-kl.de/frontdoor/index/index/docId/2843 (accessed on 14 August 2013). [Google Scholar]
- Pálfy, T.G.; Molle, P.; Langergraber, G.; Meyer, D. Simulation of constructed wetlands treating combined sewer overflow using HYDRUS/CW2D. Ecol. Eng. 2016, 87, 340–347. [Google Scholar] [CrossRef]
- Toscano, A.; Langergraber, G.; Consoli, S.; Cirelli, G.L. Modelling pollutant removal in a pilot-scale two-stage subsurface flow constructed wetlands. Ecol. Eng. 2009, 35, 281–289. [Google Scholar] [CrossRef]
- Pálfy, T.G.; Gribovszki, Z.; Langergraber, G. Design-support and performance estimation using HYDRUS/CW2D: A horizontal flow constructed wetland for polishing SBR effluent. Water Sci. Technol. 2015, 71, 965–970. [Google Scholar] [CrossRef] [PubMed]
- Pálfy, T.G.; Langergraber, G. The verification of the Constructed Wetland Model No.1 implementation in HYDRUS using column experiment data. Ecol. Eng. 2014, 68, 105–115. [Google Scholar] [CrossRef]
- Rizzo, A.; Langergraber, G.; Galváo, A.; Boano, F.; Revelli, R.; Ridolfi, L. Modelling the response of horizontal flow constructed wetlands to unsteady organic loads with HYDRUS-CWM1. Ecol. Eng. 2014, 68, 209–213. [Google Scholar] [CrossRef]
- Rizzo, A.; Langergraber, G. Novel insights on the response of horizontal flow constructed wetland to sudden changes in influent loads from a modelling investigation. Ecol. Eng. 2016, 93, 242–249. [Google Scholar] [CrossRef]
- Karlsson, S.C.; Langergraber, G.; Pell, M.; Dalahmeh, S.; Vinnerås, B.; Jönsson, H. Simulation and verification of hydraulic properties and organic matter degradation in sand filters for greywater treatment. Water Sci. Technol. 2015, 71, 426–433. [Google Scholar] [CrossRef] [PubMed]
- Smethurst, P.J.; Petrone, K.; Langergraber, G.; Baillie, C.; Worledge, D. Nitrate dynamics in a rural headwater catchment: Measurements and modeling. Hydrol. Process. 2014, 28, 1820–1834. [Google Scholar] [CrossRef]
- Pugliese, L.; Bruun, J.; Kjaergaard, C.; Hoffmann, C.C.; Langergraber, G. Nonequilibrium model for solute transport in full size subsurface flow constructed wetland. Ecol. Eng. 2016. submitted. [Google Scholar]
- Šimůnek, J.; Jacques, D.; Langergraber, G.; Bradford, S.A.; Šejna, M.; van Genuchten, M.T. Numerical Modeling of Contaminant Transport Using HYDRUS and its Specialized Modules. J. Indian Inst. Sci. 2013, 93, 265–284. [Google Scholar]
- Van Genuchten, M.T. A closed form equation for predicting the hydraulic conductivity of unsaturated soils. Soil Sci. Soc. Am. J. 1980, 44, 892–898. [Google Scholar] [CrossRef]
- Tietz, A.; Langergraber, G.; Sleytr, K.; Kirschner, A.; Haberl, R. Characterization of microbial biocoenosis in vertical subsurface flow constructed wetlands. Sci. Total Environ. 2007, 380, 163–172. [Google Scholar] [CrossRef] [PubMed]
- Langergraber, G. Erratum: Water Science and Technology 56, 2007, 233–240: Comparison of measured and simulated distribution of microbial biomass in subsurface vertical flow constructed wetlands. Water Sci. Technol. 2015, 71, 157–158. [Google Scholar] [CrossRef] [PubMed]
- Langergraber, G.; Prandtstetten, C.; Pressl, A.; Haberl, R.; Rohrhofer, R. Removal efficiency of subsurface vertical flow constructed wetlands for different organic loads. Water Sci. Technol. 2007, 56, 75–84. [Google Scholar] [CrossRef] [PubMed]
- Morvannou, A.; Forquet, N.; Vanclooster, M.; Molle, P. Which hydraulic model to use in vertical flow constructed wetlands? In Proceedings of the 13th IWA Specialized Group Conference on “Wetland Systems for Water Pollution Control”, Perth, Australia, 25–29 November 2012; Conference Papers Volume 2. Dallas, S., Ed.; Murdoch University: Perth, Australia, 2012; pp. 145–153. [Google Scholar]
- Molle, P.; Liénard, A.; Boutin, C.; Merlin, G.; Iwema, A. How to treat raw sewage with constructed wetlands: An overview of the French systems. Water Sci. Technol. 2005, 51, 11–21. [Google Scholar] [PubMed]
- Troesch, S.; Esser, D. Constructed Wetlands for the Treatment of Raw Wastewater: The French Experience. Sustain. Sanit. Pract. 2012, 12, 9–15. [Google Scholar] [CrossRef]
- Langergraber, G. Development of a Simulation Tool for Subsurface Flow Constructed Wetlands. Ph.D. Dissertation, BOKU University, Vienna, Austria, 2001. [Google Scholar]
- Morvannou, A.; Choubert, J.-M.; Vanclooster, M.; Molle, P. Solid respirometry to characterize nitrification kinetics: A better insight for modelling nitrogen conversion in vertical flow constructed wetlands. Water Res. 2011, 45, 4995–5004. [Google Scholar] [CrossRef] [PubMed]
- Puchner, B.; Langergraber, G. Simulation of two-stage vertical flow sand and zeolite filters treating domestic wastewater using the HYDRUS wetland module. In Proceedings of the 6th International Symposium on “Wetland Pollution Dynamics and Control” and Annual Conference of the Constructed Wetland Association, York, UK, 13–18 September 2015; Dotro, G., Gagnon, V., Eds.; Book of Abstracts. Cranfield University: Cranfield, UK, 2015; pp. 198–199. [Google Scholar]
- Dal Santo, S.; Canga, E.; Pressl, A.; Borin, M.; Langergraber, G. Investigation of nitrogen removal in a two-stage subsurface vertical flow constructed wetland system using natural zeolite. In Proceedings of the 12th IWA Specialized Group Conference on “Wetland Systems for Water Pollution Control”, San Servolo, Venice, Italy, 3–8 October 2010; Masi, F., Nivala, J., Eds.; IRIDRA Srl: Florence, Italy, 2010; pp. 263–270. [Google Scholar]
- Pálfy, T. Verification of the Implementation of CWM1 in the HYDRUS Wetland Module. Master’s Thesis, BOKU University, Vienna, Austria, 2013. [Google Scholar]
- Langergraber, G. The role of plant uptake on the removal of organic matter and nutrients in subsurface flow constructed wetlands—A simulation study. Water Sci. Technol. 2005, 51, 213–223. [Google Scholar] [PubMed]
- Bradford, S.A.; Šimůnek, J.; Bettahar, M.; van Genuchten, M.T.; Yates, S.R. Modeling Colloid Attachment, Straining, and Exclusion in Saturated Porous Media. Environ. Sci. Technol. 2003, 37, 2242–2250. [Google Scholar] [CrossRef] [PubMed]
- Langergraber, G.; Šimůnek, J. Simulating particle transport in subsurface flow constructed wetlands with CW2D/HYDRUS. In Proceedings of the 3rd International Symposium on “Wetland Pollutant Dynamics and Control—WETPOL 2009”, Barcelona, Spain, 20–24 September 2009; Bayona, J.M., García, J., Eds.; Book of Abstracts. Universitat Politècnica de Catalunya: Barcelna, Spain, 2009; pp. 135–136. [Google Scholar]
- Samsó, R.; García, J. The Cartridge Theory: A description of the functioning of horizontal subsurface flow constructed wetlands for wastewater treatment, based on modelling results. Sci. Total Environ. 2014, 473–474, 651–658. [Google Scholar] [CrossRef] [PubMed]
- Mostafa, M.; Van Geel, P.J. Conceptual models and simulations for biological clogging in unsaturated soils. Vadose Zone J. 2007, 6, 175–185. [Google Scholar] [CrossRef]
- Samsó, R.; Blázquez, J.; Agulló, N.; Grau, J.; Torres, R.; García, J. Effect of bacteria density and accumulated inert solids on the effluent pollutant concentrations predicted by the constructed wetlands model BIO_PORE. Ecol. Eng. 2015, 80, 172–180. [Google Scholar] [CrossRef] [Green Version]
- Samsó, R.; García, J.; Molle, P.; Forquet, N. Modelling bioclogging in variably saturated porous media and the interactions between surface/subsurface flows: Application to Constructed Wetlands. J. Environ. Manag. 2015, 165, 271–279. [Google Scholar] [CrossRef] [PubMed]
- Rajabzadeh, A.R.; Legge, R.L.; Weber, K.P. Multiphysics modelling of flow dynamics, biofilm development and wastewater treatment in a subsurface vertical flow constructed wetland mesocosms. Ecol. Eng. 2014, 74, 107–116. [Google Scholar] [CrossRef]
- Meyer, D.; Dittmer, U. RSF_Sim—A simulation tool to support the design of constructed wetlands for combined sewer overflow treatment. Ecol. Eng. 2015, 80, 198–204. [Google Scholar] [CrossRef]
- Pálfy, T.G.; Meyer, D.; Molle, P. Orage: Simulation of planted detentive filters treating urban storm water. In Proceedings of the 6th International Symposium on Wetland Pollution Dynamics and Annual Conference of the Constructed Wetland Association, York, UK, 13–18 September 2015; Dotro, G., Gagnon, V., Eds.; Book of Abstracts. Cranfield University: Cranfield, UK, 2015; pp. 216–217. [Google Scholar]
- Pálfy, T.G.; Gourdon, R.; Meyer, D.; Troesch, S.; Molle, P. A dynamic design tool for CWs treating combined sewer overflow. In Proceedings of the 15th IWA Specialized Group Conference on “Wetland systems for Water Pollution Control”, Gdansk, Poland, 4–9 September 2016; Gajewska, M., Matej-Lukowicz, K., Wojciechowska, E., Eds.; Conference Proceedings Volume 2. Gdańsk University of Technology: Gdańsk, Poland, 2016; pp. 771–790. [Google Scholar]
- Morvannou, A.; Froquet, N.; Troesch, S.; Molle, P. Impact of design and operating conditions on vertical flow constructed wetland performances: Modelling and global assessment confrontation. In Proceedings of the 6th International Symposium on Wetland Pollution Dynamics and Annual Conference of the Constructed Wetland Association, York, UK, 13–18 September 2015; Dotro, G., Gagnon, V., Eds.; Book of Abstracts. Cranfield University: Cranfield, UK, 2015; pp. 196–197. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Biokinetic Model | CW2D | CWM1 |
|---|---|---|
| Processes | Aerobic and anoxic (9 processes) | Aerobic, anoxic, and anaerobic (17 processes) |
| Components | Oxygen, organic matter, nitrogen, and phosphorus (12 components) | Oxygen, organic matter, nitrogen, and sulphur (16 components) |
| Application | Vertical flow (VF) wetlands | VF and HF wetlands |
| Lightly loaded horizontal flow (HF) wetlands |
| Simulation Tool | HYDRUS Wetland Module [7] | BIO_PORE [8] |
|---|---|---|
| Flow model | Richards equation (variably saturated flow) | Variable water table (saturated flow) |
| Transport model | Advection, dispersion, adsorption | Advection, dispersion, adsorption |
| Biokinetic model | CW2D + CWM1 | CWM1 |
| Influence of plants | Evapotranspiration, uptake and release of substances | Evapotranspiration, uptake and release of substances |
| Clogging model | Not considered | Included |
| Parameter | Residual Water Content θr | Saturated Water Content θs | Shape Parameters | Saturated Hydraulic Conductivity Ks | ||
|---|---|---|---|---|---|---|
| α | N | L | ||||
| Unit | (-) | (-) | (1/cm) | (-) | (-) | (cm/h) |
| HYDRUS parameter set for ‘Sand’ | 0.045 | 0.43 | 0.145 | 2.68 | 0.5 | 29.7 |
| Measured Ks and porosity | 0.045 | 0.30 | 0.145 | 2.68 | 0.5 | 117 |
| Fitted parameter set | 0.013 | 0.30 | 0.147 | 2.42 | 0.636 | 117 |
| Parameter | Influent | Effluent (0.06–4 mm Sand) | Effluent (1–4 mm Sand) | ||
|---|---|---|---|---|---|
| Measured | Measured | Simulated | Measured | Simulated | |
| NH4-N | 60.0 | 0.15 | 0.01 | 1.20 | 0.16 |
| NO3-N | 3.0 | 38.5 | 41.1 | 50.0 | 63.0 |
| Method | Measured with Solid Respirometry | Calculated from Simulation Results * |
|---|---|---|
| Results (mg·O2/Lsample/h) | 32–50 (mean = 41, SD = 9; 2 values) | 30.5 |
| Parameter | Residual Water Content θr | Saturated Water Content θs | Shape Parameters | Saturated Hydraulic Conductivity Ks | ||
|---|---|---|---|---|---|---|
| α | N | L | ||||
| Unit | (-) | (-) | (1/cm) | (-) | (-) | (cm/min) |
| Sand (1–4 mm) | 0.063 | 0.37 | 0.124 | 3.2 | 0.49 | 55 |
| Zeolite (2–5 mm) | 0.045 | 0.42 | 0.096 | 4.6 | 1.27 | 154 |
| Parameter | CR | CS | CI | COD | NH4-N | NO2-N | NO3-N | |
|---|---|---|---|---|---|---|---|---|
| Influent | Measured | - | - | - | 294 | 93 | 0.008 | 0.59 |
| Simulated | 274 | 100 | 20 | - | 93 | 0.008 | 0.59 | |
| Effluent (Sand) | Measured | - | - | - | 35 (5) | 14.5 (4.6) | 0.026 (0.040) | 70.8 (8.4) |
| Simulated 1 | 0.17 | 0.08 | 31.2 | 31.5 | 0.42 | <0.003 | 85.7 | |
| Simulated 2 | 0.14 | 0.01 | 29.4 | 30.0 | 15.3 | 0.016 | 76.2 | |
| Effluent (Zeolite) | Measured | - | - | - | 29 (9) | 0.06 (0.05) | 0.52 (1.10) | 51.8 (4.6) |
| Simulated | 0.16 | 0.01 | 29.1 | 29.3 | 0.27 | <0.003 | 43 |
| Parameter | COD | NH4-N | NO2-N | NO3-N | |
|---|---|---|---|---|---|
| Influent | Measured | 63.9 (3.3) | 22.1 (1.9) | 0.18 (0.38) | 0.34 (0.10) |
| Effluent HF (planted) | Measured | 47.5 (2.8) | 16.6 (1.2) | 0.06 (0.05) | 0.18 (0.17) |
| Simulated | 44.4 | 17.2 | 0.02 | 2.82 | |
| Effluent HF (unplanted) | Measured | 48.2 (4.1) | 20.4 (0.6) | 0.02 (0.01) | 0.12 (0.11) |
| Simulated | 50.6 | 21.5 | 6 × 10−5 | 1 × 10−4 | |
| Effluent VF (planted) | Measured | 23.0 (2.5) | 2.0 (0.1) | 0.10 (0.07) | 16.2 (1.1) |
| Simulated | 24.6 | 0.54 | 0.01 | 26.9 | |
| Effluent VF (unplanted) | Measured | 23.2 (2.3) | 2.0 (0.1) | 0.19 (0.08) | 16.4 (1.3) |
| Simulated | 24.0 | 0.96 | 0.01 | 25.0 |
© 2016 by the author; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Langergraber, G. Applying Process-Based Models for Subsurface Flow Treatment Wetlands: Recent Developments and Challenges. Water 2017, 9, 5. https://doi.org/10.3390/w9010005
Langergraber G. Applying Process-Based Models for Subsurface Flow Treatment Wetlands: Recent Developments and Challenges. Water. 2017; 9(1):5. https://doi.org/10.3390/w9010005
Chicago/Turabian StyleLangergraber, Guenter. 2017. "Applying Process-Based Models for Subsurface Flow Treatment Wetlands: Recent Developments and Challenges" Water 9, no. 1: 5. https://doi.org/10.3390/w9010005