Performance Analysis and Improvement of the Bike Sharing System Using Closed Queuing Networks with Blocking Mechanism


Abstract
:1. Introduction
- Monitoring. The monitoring operations are real-time or short time regulation activities aiming to empty docks in the saturated stations and feeding the empty ones by relocating the bikes using trucks [5,6]. Alternatively, the operator offers financial incentives to the users, who then relocate the bikes themselves [7,8,9].
- the limited capacity of stations,
- the behavior of the users rejected by a full station.
2. Queuing Model with RS-RD Blocking for BSS
2.1. Closed Queuing Model with Blocking
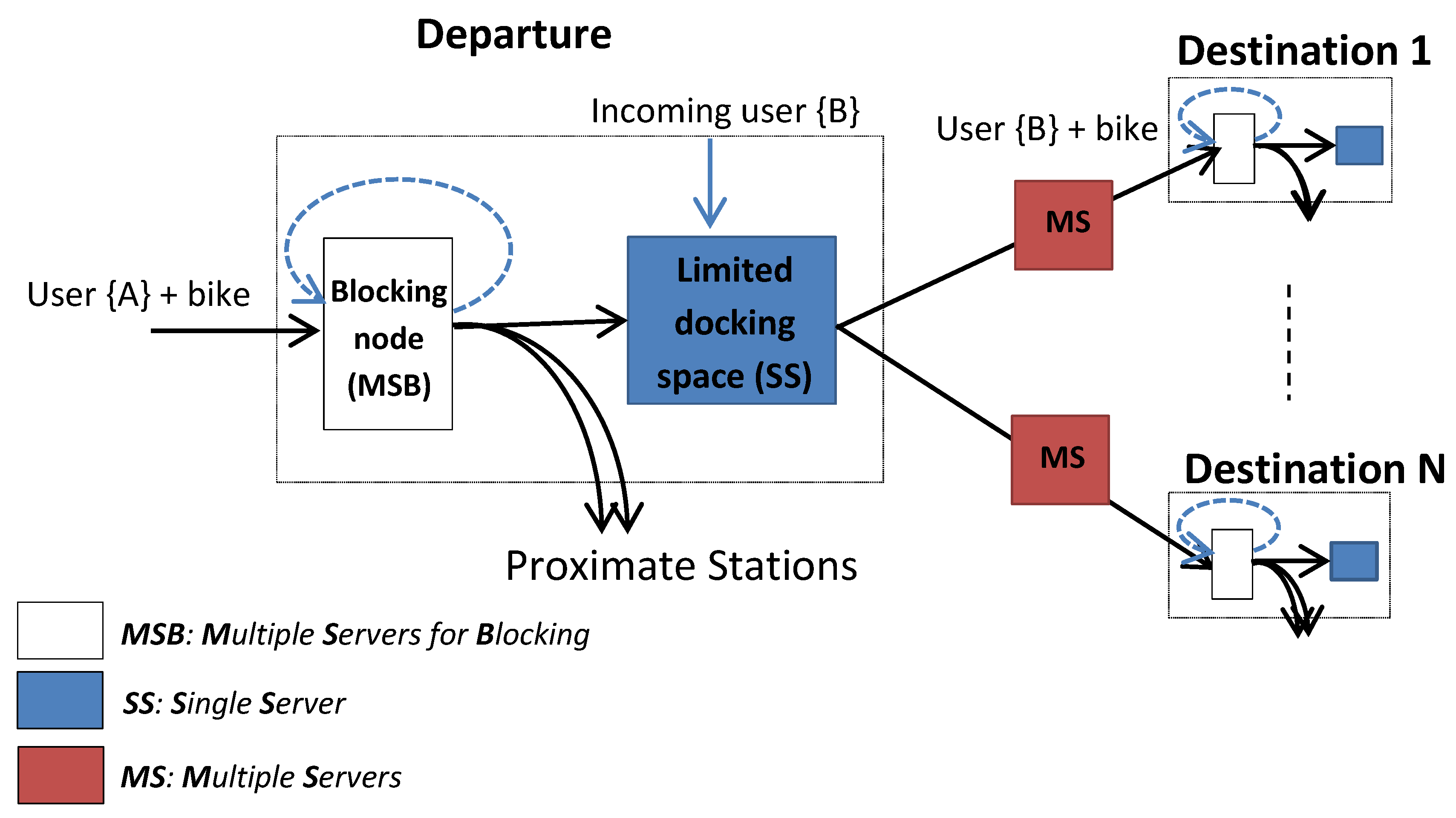
2.1.1. A Bike Station Model
- Step 1. A bike heading towards the bike station i (user {A} + bike in Figure 1) comes first to its .
- Step 2. A destination (i.e., principal or secondary ) is chosen according to the routing probabilities in the routing matrix .
- -
- Step 2-a. If a secondary bike station (a neighboring station) is chosen, the bike leaves the local process associated with the bike station i.
- -
- Step 2-b. Otherwise, the bike is routed to (the principle destination), then
- *
- Step 2-b1. If, there is at least one free docking space, the bike is dropped. So, the service is successful.
- *
- Step 2-b2. If the is full, the blocking mechanism RS-RD is applied. The bike loops back to (the dashed arrow in Figure 1). The process returns to the beginning (Go To Step 1).
2.1.2. The Model of Trip between Two Stations
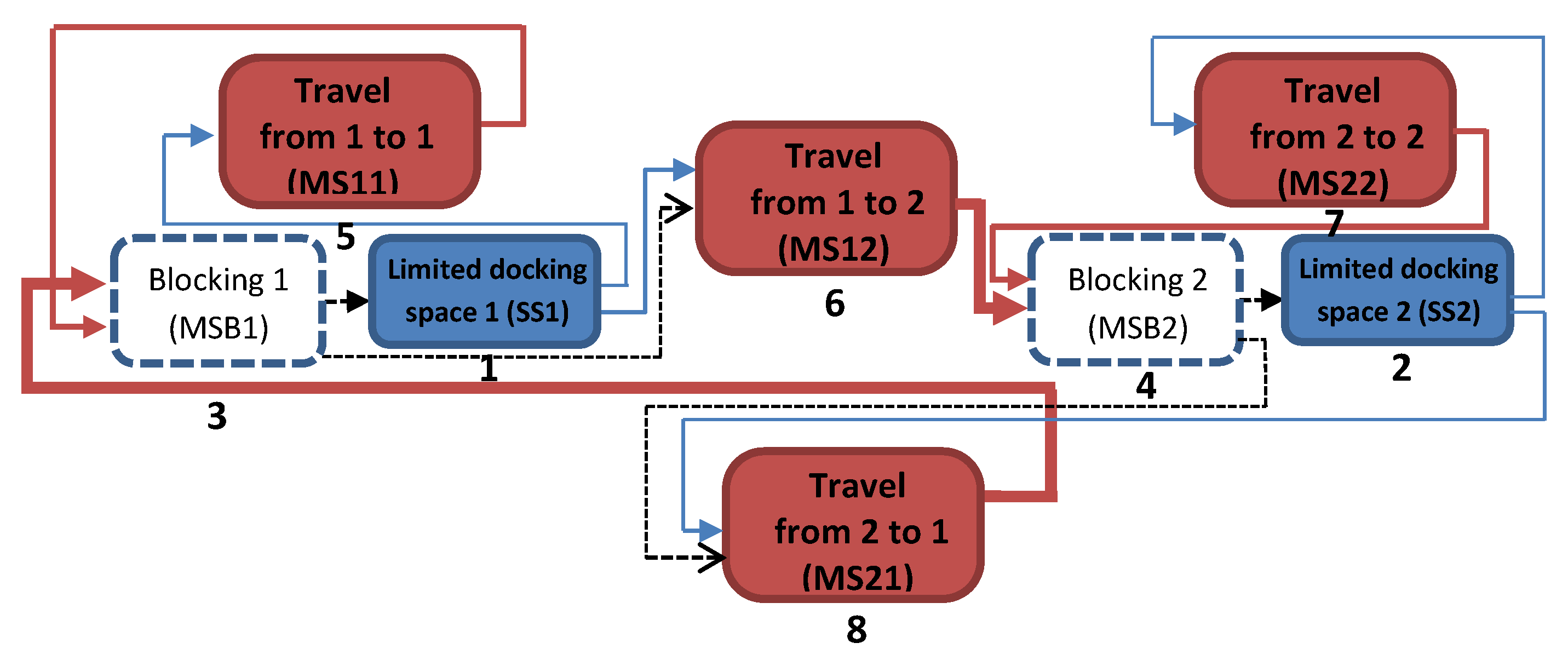
2.1.3. The Explicit Model of Two Bike Stations

3. Resolution of the Closed Network under RS-RD Blocking Using Entropy Maximization Method
3.1. State Space
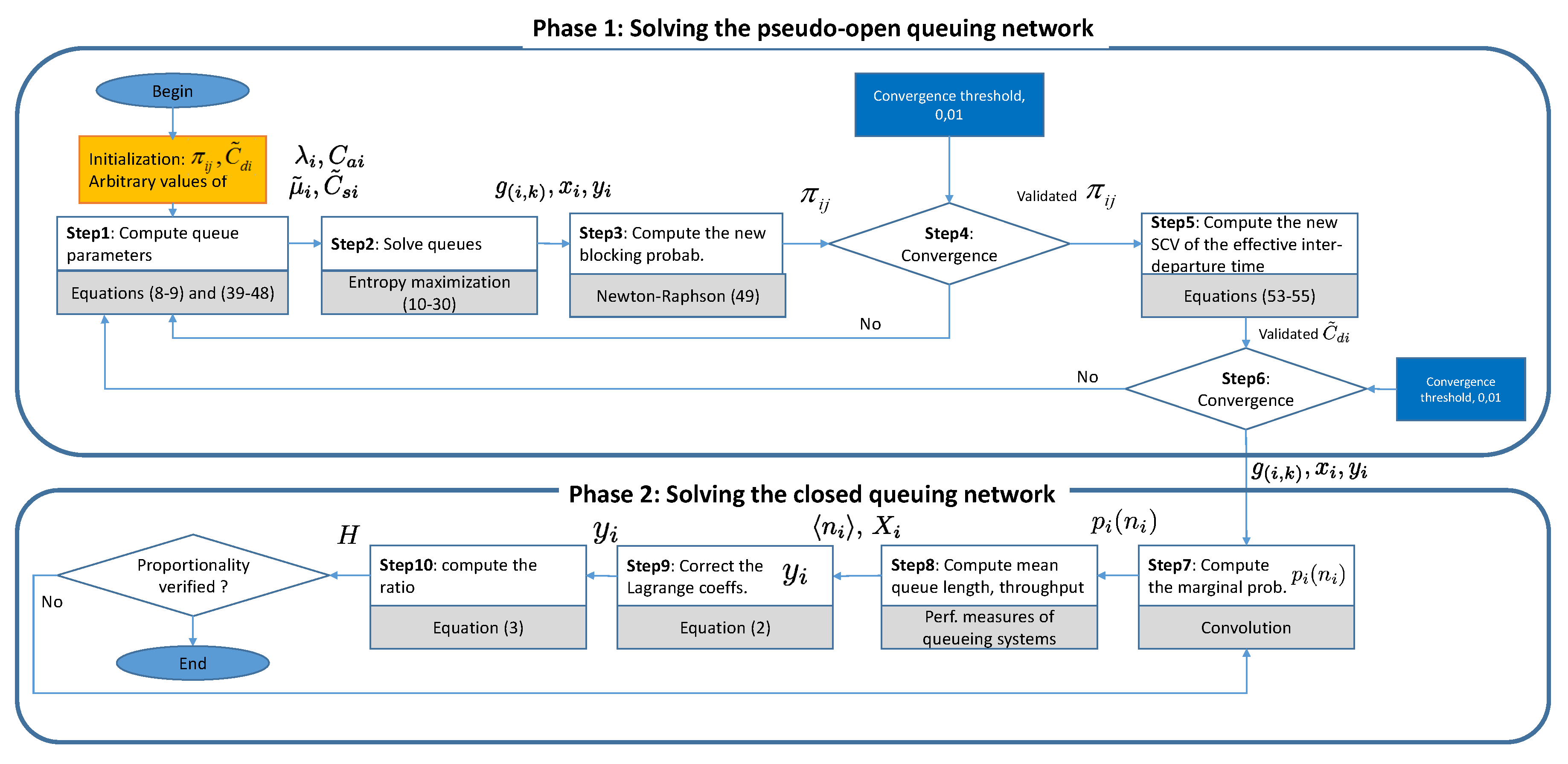
3.2. Procedure for Solving the Closed Network of the BSS Model
Phase 1-Solving the Pseudo-Open Queuing Network
- queues as censored queues (i.e., those queues where the arriving customers are turned away when the buffer is full), (GE(,)/GE(,)/1/0;), and
- and queues as stable queues (i.e., those queues without capacity limitations) (GE(,)/GE(,)/L).
Phase 2—Solving the Closed Queuing Network
3.3. Performance Indicators of the BSS
- Availability of bikes is the probability of finding at least one bike at .
- Availability of docks is the probability of finding at least one free dock at .
- Aggregate performance of a station is the weighted combination of both availabilities.
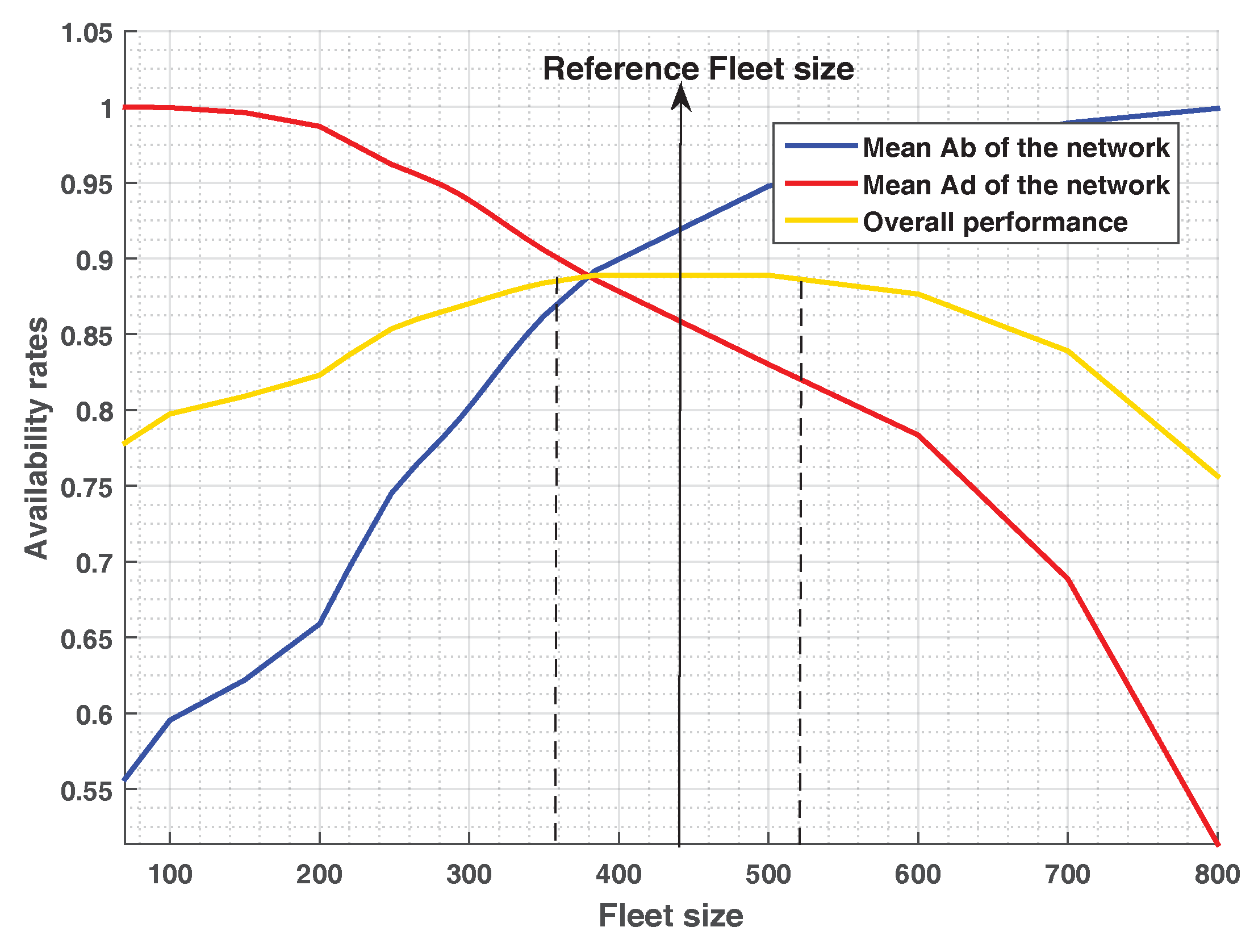
- Overall performance of the network computes the normalized overall performance of all stations of the network.with where represents the number of bike stations.
3.4. Comparison and Validity Testing
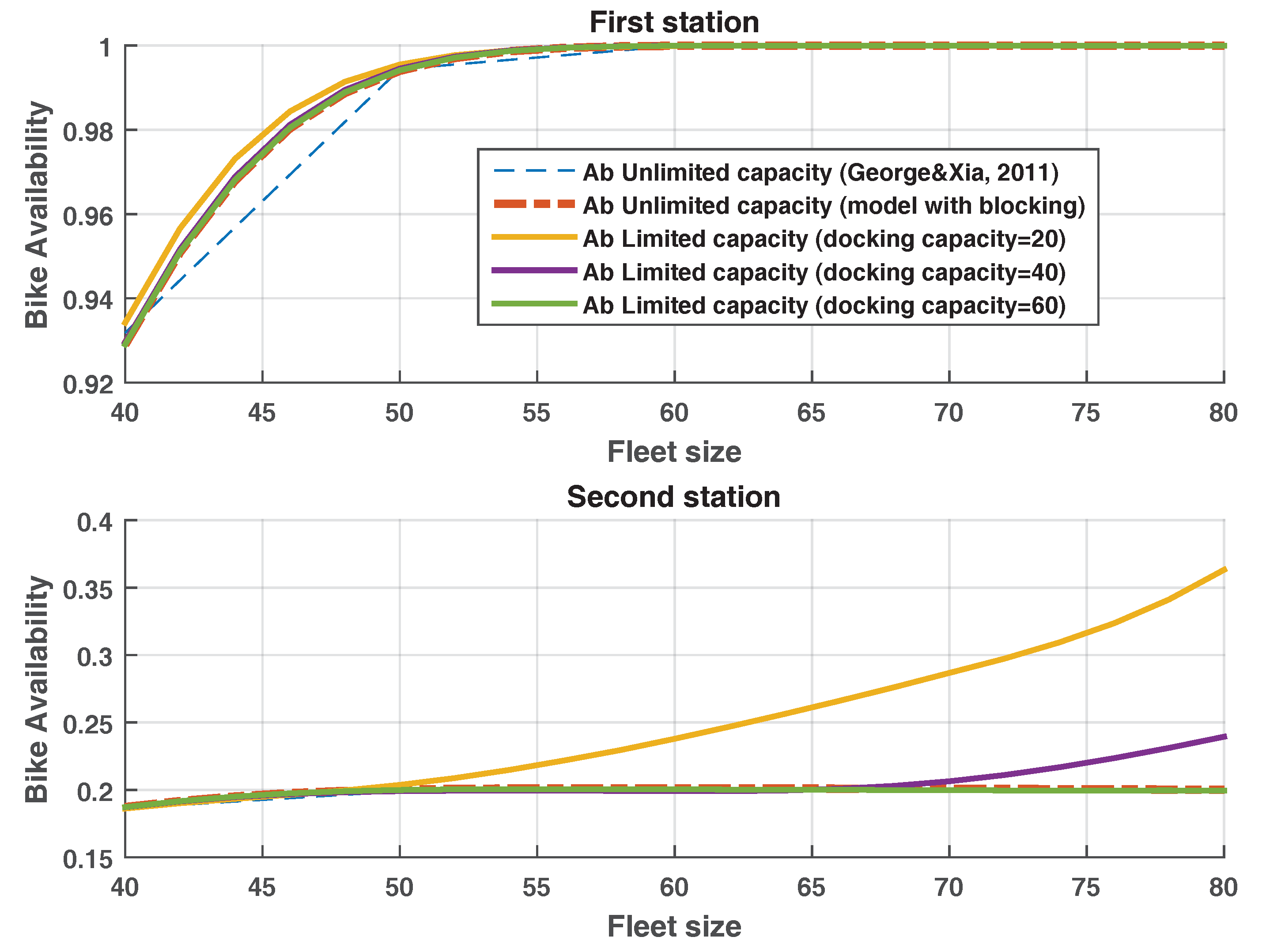
- -
- Introducing the limited capacity of the stations has a direct influence on the bike availability. Due to the routing probabilities in R, the first station is saturated. The bikes leaving the first station are routed mainly to the same station (i.e., 0.9) as shown in R. Moreover, this station receives bikes from the second station too (i.e., 0.5). This explains the high bike availability of the station 1 in all the three scenarios, which approximately, matches with the unlimited capacity scenario.
- -
- The difference between the scenarios, regarding the bike availability, is much more important for the second station than the first one. Due to the unbalanced routing probabilities, the second station receives fewer bikes than the first station. In the limited capacity scenarios, the more the fleet size is increased the more the second station is saturated compared to the unlimited capacity model. In fact, because of the limited capacity, the first saturated station would reject bikes as the fleet becomes bigger. Therefore, the blocking mechanism would redirect the bikes to the second station. As the docking capacity becomes bigger, the bike availability of the second station increases and tends to the value of the bike availability (Ab) in the unlimited capacity model.
4. Numerical Results for a Subset of 20 Stations of Paris Velib
4.1. Data Analysis and Hypothesis
4.2. Experiments and Results
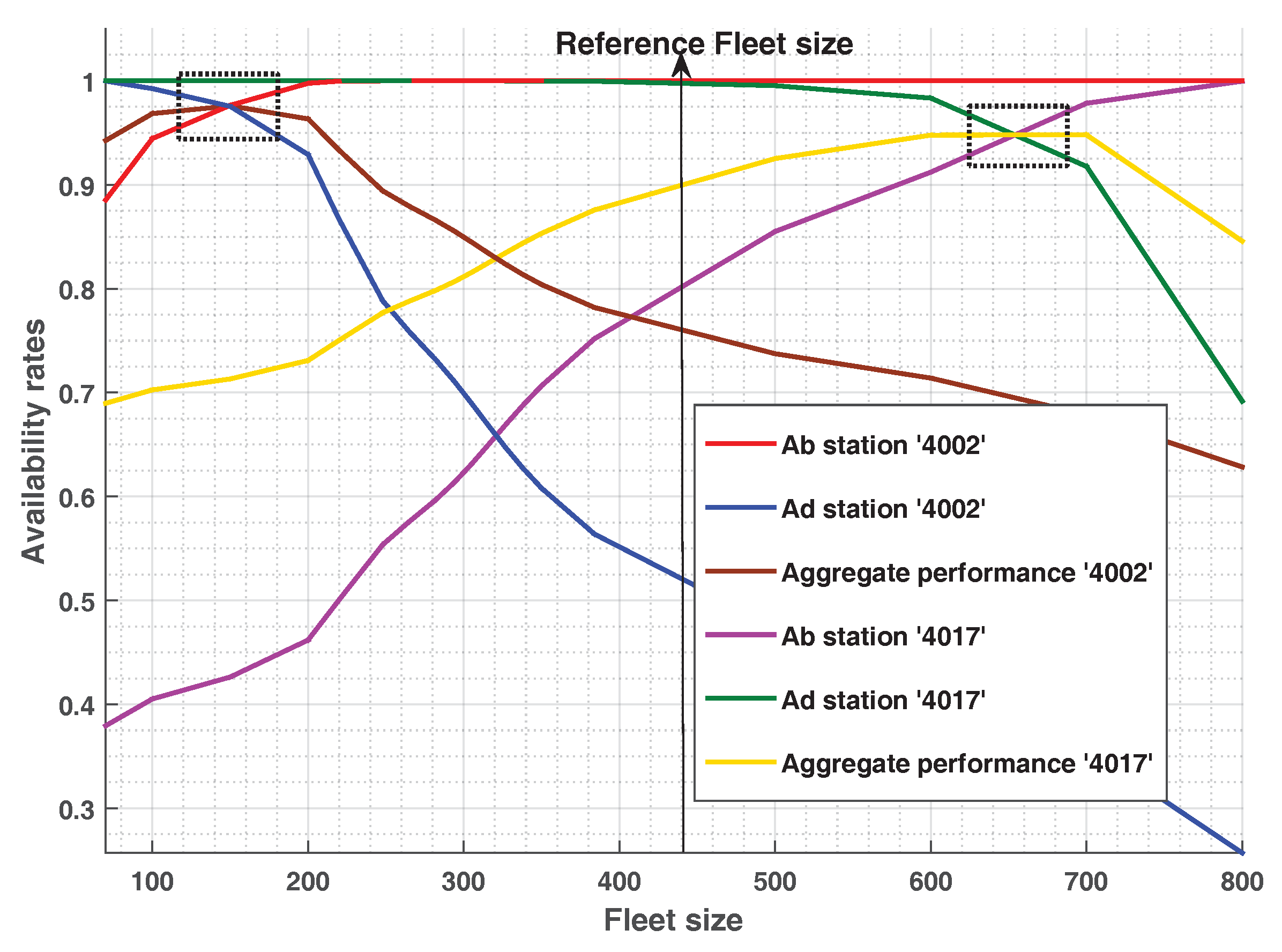
- Fleet-sizing: impact on dock and bike availability. The fleet sizing is accomplished through the change of the parameter L in the model. The stations are affected differently. Only the availability rates of two typical stations: 4002 and 4017 are presented in Figure 5.
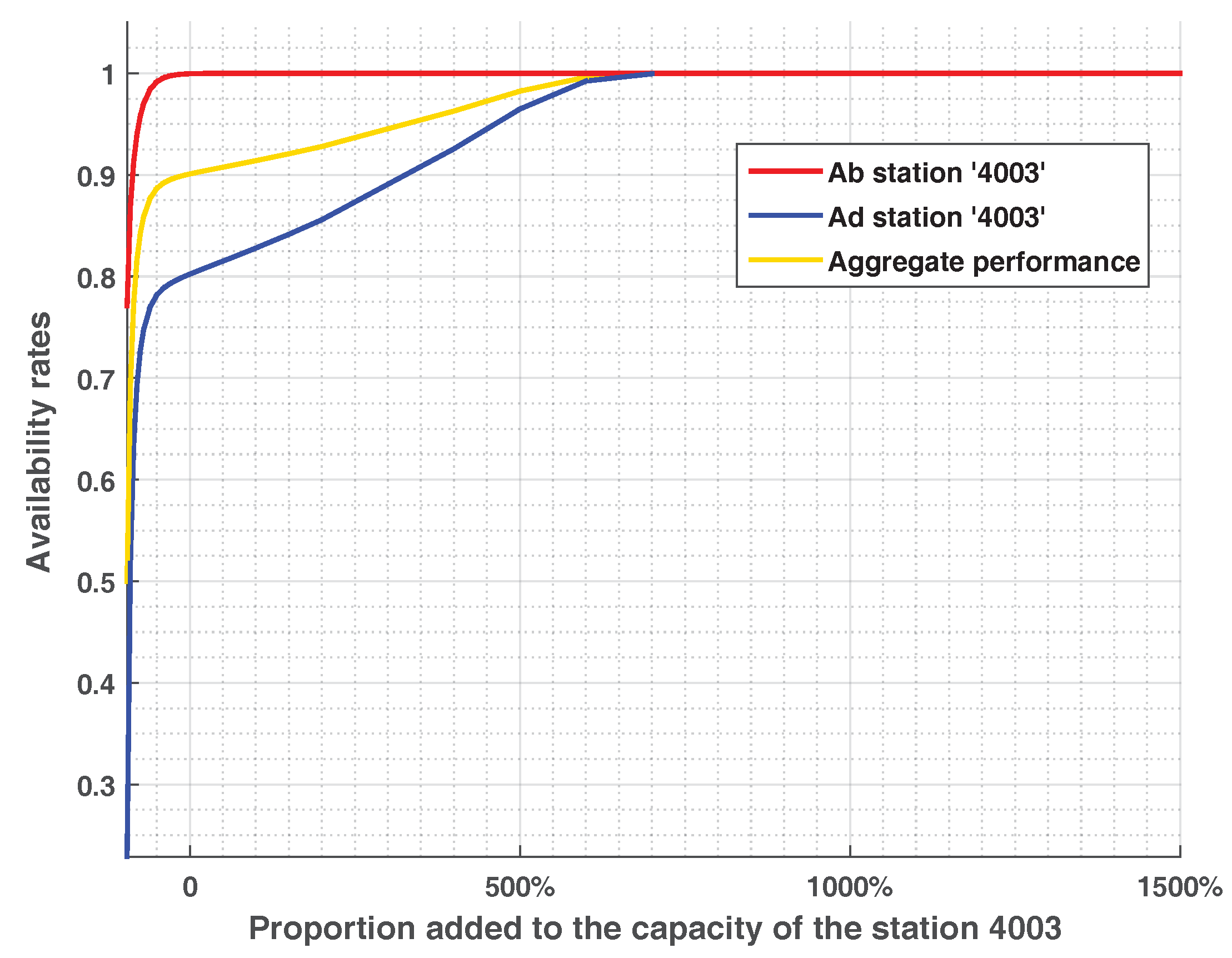
- Docking capacity. To visualize the effect of the docking capacity, the number of docks of the station 4003 is modified by adding or removing a proportion of its actual capacity (20 docks) as shown in Figure 7.
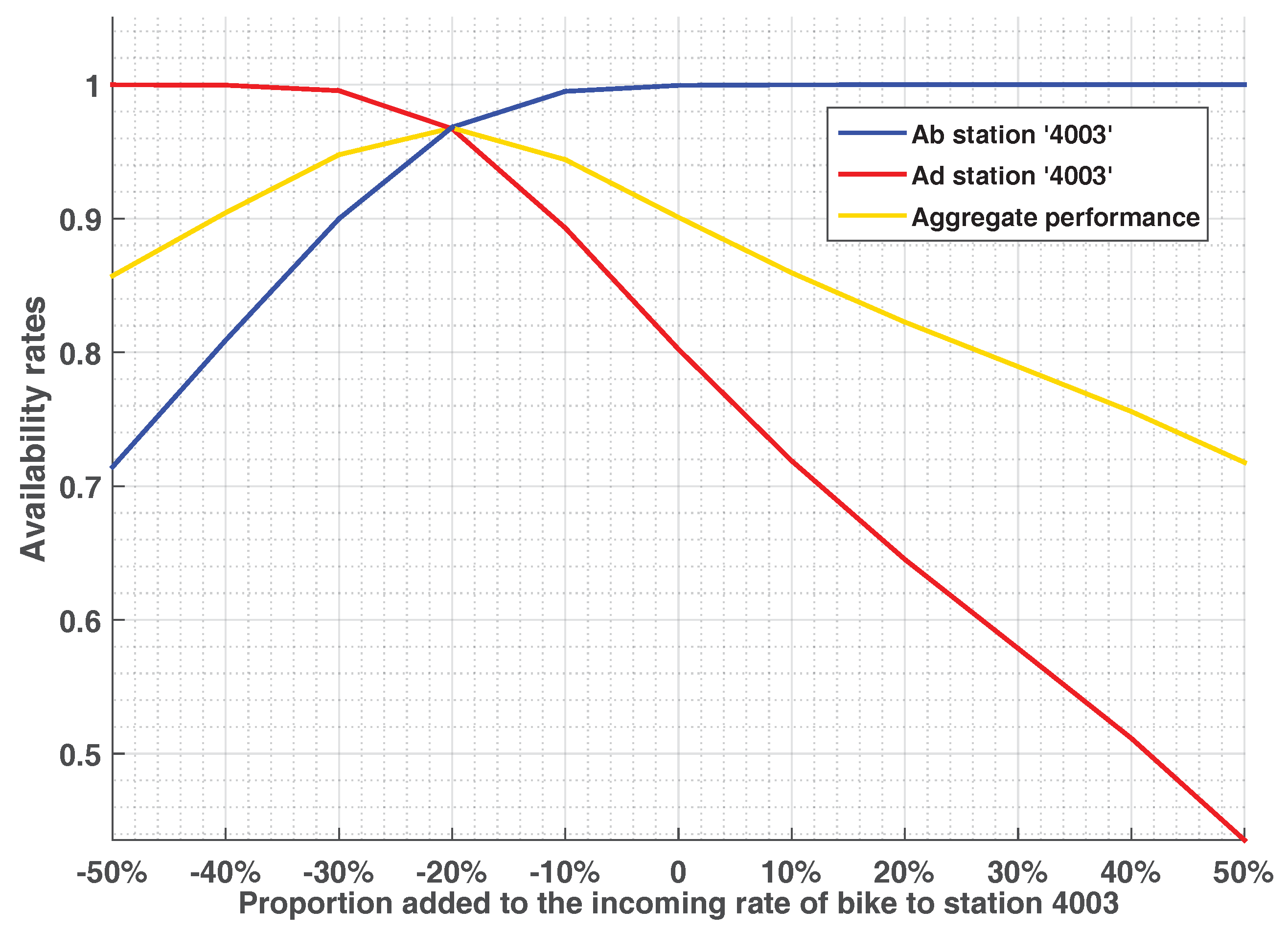
- Incoming flow variation. It is possible to modify the incoming flow of bikes to stations by an economic incentive for instance [9]. In this experiment, we would like to find out how the performance of the station 4003 evolves as a function of the incoming flow. This effect is represented in Figure 8.
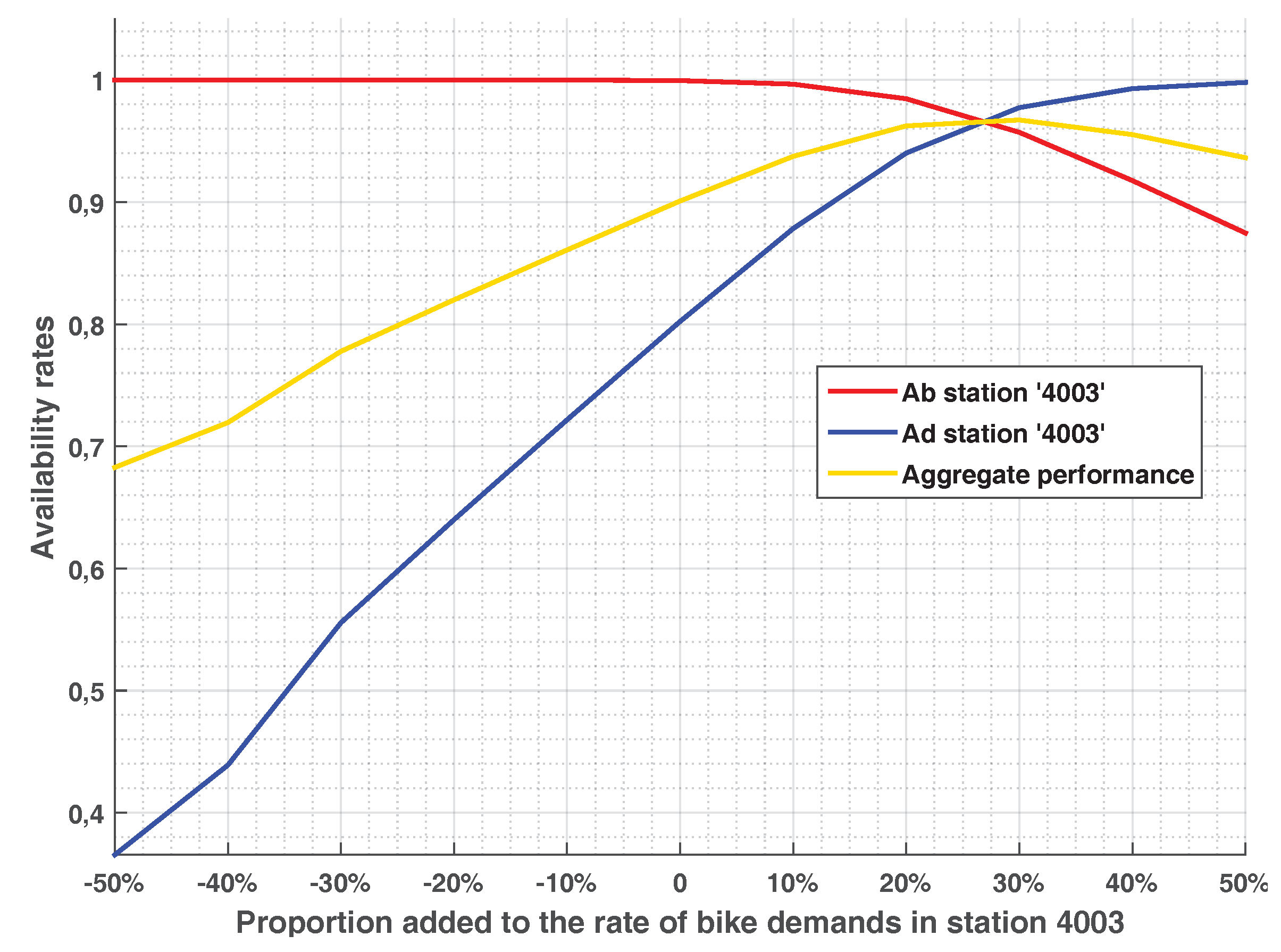
- Demands for bikes variation. It is also possible to increase the demand of bikes (to drain the bikes from saturated or almost saturated stations) by starting some economic incentives. We would like to know whether a BSS operator may launch such incentives to improve the performance of stations.
4.3. Discussion of the Obtained Results
5. Conclusions and Perspectives
- Control decisions: fleet-sizing. Fleet-sizing has a positive influence on the bike availability but degrades the dock availability if the fleet is too large. Locally, every station has an optimal fleet size that maximizes its aggregate performance. From the point of view of the network, the overall performance is quite robust for a relatively “large” fleet size span.
- Control decisions: capacity-sizing. The overall performance of the network deteriorates if the capacity is changed. The system manager should not consider this option to improve the performances.
- Changes in the arrival and departure flows of bikes. Locally, the modification of the bikes arrival to and departure from a station is very effective with a concrete impact on the aggregate performance of the station. The stations can be targeted for improvement without being concerned with impacts on other stations. These changes can be the effects of the monitoring decisions. These monitoring decisions may be cheaper than the techniques that operators are using now (bikes displacements by trucks). However, their effectiveness requires a deeper economical study.
Supplementary Materials
Author Contributions
Funding
Conflicts of Interest
Nomenclature
| The number of servers in queue i. | |
| M | The number of queues in the network. |
| L | The total number of bikes in the network. |
| The capacity of docking in a bike station i, | |
| The number of bike stations. | |
| The virtual capacity of queue i. | |
| The blocking probability that a completer from the queue i is blocked by the queue j, . | |
| The blocking probability entering to queue i, . | |
| The probability of routing from queue i to queue j, | |
| The probability of the effective (without rejection) routing from queue i to queue j, | |
| The rate of the inter-arrival time of bikes to queue i, . | |
| The rate of the effective (without rejection) inter-arrival time of bikes to queue i, . | |
| The squared coefficient of variation (scv) of the inter-arrival time of bikes to queue i, . | |
| The number of the bikes in the queue i, . | |
| The marginal probability of the queue i to contain bikes, . | |
| The state of the network, . | |
| The equilibrium probability of state, . |
| The mean number of bikes in queue i, . | |
| The throughput of queue i, . | |
| The availability of bikes in a station i. | |
| The availability of docks in a station i. | |
| The aggregate performance of a station i. | |
| The overall performance of the network. | |
| The squared coefficient of variation of the effective (without rejection) inter-departure time from queue i, . | |
| The rate of the effective (without rejection) service at the queue i, . | |
| The effective (without rejection) squared coefficient of variation of the service time of queue i, . | |
| The Lagrange coefficient corresponding to the constraint of the minimum occupied servers, . | |
| The Lagrange coefficient corresponding to the constraint of the mean queue length of queue i, . | |
| The Lagrange coefficient corresponding to the constraint of the probability of finding a full queue i, . |
Abbreviations
| BCMP | Baskett, Chandy, Muntz & Palacios |
| BSS | Bike Sharing System |
| CQN | Closed Queueing Network |
| MS | Multiple Servers |
| MSB | Multiple Servers for Blocking |
| QN | Queueing Network |
| RS-RD | Repetitive Service-Random Destination |
| SS | Single Server |
| VSS | Vehicle Sharing System |
Appendix A. Queuing Networks
Appendix B. Resolution Approach
Appendix B.1. Entropy Maximization for Censored and Stable Queues
Appendix B.2. Resolution of the Closed Network
- are the Lagrange coefficients corresponding to the constraint ,
- are the Lagrange coefficients corresponding to the constraint for the queues and for the and ,
- are the Lagrange coefficients corresponding to the constraints .
- and if or 0 otherwise.
- if or 0 otherwise.
Appendix B.3. Resolution of the Pseudo-Open Network
Appendix B.4. The Decomposition of the Network into Individual Queues
References
- Shaheen, S.A. Introduction Shared-Use Vehicle Services for Sustainable Transportation: Carsharing, Bikesharing, and Personal Vehicle Sharing across the Globe. Int. J. Sustain. Transp. 2013, 7, 1–4. [Google Scholar] [CrossRef]
- Laporte, G.; Meunier, F.; Wolfler Calvo, R. Shared mobility systems. 4or 2015, 13, 341–360. [Google Scholar] [CrossRef]
- Nair, R.; Miller-Hooks, E.; Hampshire, R.C.; Bušić, A. Large-Scale Vehicle Sharing Systems: Analysis of Vélib’. Int. J. Sustain. Transp. 2013, 7, 85–106. [Google Scholar] [CrossRef]
- Shi, J.G.; Si, H.; Wu, G.; Su, Y.; Lan, J. Critical factors to achieve dockless bike-sharing sustainability in China: A stakeholder-oriented network perspective. Sustainability 2018, 10, 2090. [Google Scholar] [CrossRef]
- Kadri, A.A.; Kacem, I.; Labadi, K. A branch-and-bound algorithm for solving the static rebalancing problem in bicycle-sharing systems. Comput. Ind. Eng. 2016, 95, 41–52. [Google Scholar] [CrossRef]
- Ho, S.C.; Szeto, W.Y. GRASP with path relinking for the selective pickup and delivery problem. Expert Syst. Appl. 2016, 51, 14–25. [Google Scholar] [CrossRef]
- Preisler, T.; Dethlefs, T.; Renz, W. Self-Organizing Redistribution of Bicycles in a Bike-Sharing System based on Decentralized Control. In Proceedings of the Federated Conference on Computer Science and Information Systems, Gdansk, Poland, 11–14 September 2016; Volume 8, pp. 1471–1480. [Google Scholar] [CrossRef]
- Lin, J.J.; Wang, N.L.; Feng, C.M. Public bike system pricing and usage in Taipei. Int. J. Sustain. Transp. 2017, 11, 633–641. [Google Scholar] [CrossRef]
- Li, L.; Shan, M. Bidirectional incentive model for bicycle redistribution of a bicycle sharing system during rush hour. Sustainability 2016, 8, 1299. [Google Scholar] [CrossRef]
- Nair, R.; Miller-Hooks, E. Equilibrium network design of shared-vehicle systems. Eur. J. Oper. Res. 2014, 235, 47–61. [Google Scholar] [CrossRef]
- Lin, C.C.; Chen, X.R.; Chang, J.W.; Jiang, X.Y.; Lo, S.C. Replenishment Strategies for the YouBike System in Taipei. In Proceedings of the Institute of Industrial Engineers Asian Conference 2013; Lin, Y.K., Tsao, Y.C., Lin, S.W., Eds.; Springer: Berlin, Germany, 2013; pp. 389–396. [Google Scholar]
- Garcia-Gutierrez, J.; Romero-Torres, J.; Gaytan-Iniestra, J. Dimensioning of a Bike Sharing System (BSS): A Study Case in Nezahualcoyotl, Mexico. Procedia 2014, 162, 253–262. [Google Scholar] [CrossRef]
- Mizuno, S.; Iwamoto, S.; Seki, M.; Yamaki, N. Proposal for optimal placement platform of bikes using queueing networks. SpringerPlus 2016, 5, 2071. [Google Scholar] [CrossRef] [PubMed]
- Gast, N.; Massonet, G.; Reijsbergen, D.; Tribastone, M. Probabilistic Forecasts of Bike-Sharing Systems for Journey Planning. In Proceedings of the 24th ACM International on Conference on Information and Knowledge Management (CIKM 2015), Melbourne, Australia, 19–23 October 2015; pp. 703–712. [Google Scholar] [CrossRef] [Green Version]
- Montoliu, R. Discovering mobility patterns on bicycle-based public transportation system by using probabilistic topic models. Adv. Intell. Soft Comput. 2012, 153, 145–153. [Google Scholar]
- Bordagaray, M.; Dell’Olio, L.; Fonzone, A.; Ibeas, Á. Capturing the conditions that introduce systematic variation in bike-sharing travel behavior using data mining techniques. Transp. Res. Part C Emerg. Technol. 2016, 71, 231–248. [Google Scholar] [CrossRef]
- Jiménez, P.; Nogal, M.; Caulfield, B.; Pilla, F. Perceptually important points of mobility patterns to characterise bike sharing systems: The Dublin case. J. Transp. Geogr. 2016, 54, 228–239. [Google Scholar] [CrossRef]
- Du, M.; Cheng, L. Better understanding the characteristics and influential factors of different travel patterns in free-floating bike sharing: Evidence from Nanjing, China. Sustainability 2018, 10, 1244. [Google Scholar] [CrossRef]
- Hu, S.R.; Liu, C.T. An optimal location model for a bicycle sharing program with truck dispatching consideration. In Proceedings of the 2014 17th IEEE International Conference on Intelligent Transportation Systems (ITSC 2014), Qingdao, China, 8–11 October 2014; pp. 1775–1780. [Google Scholar] [CrossRef]
- Li, L.; Shan, M.; Li, Y.; Liang, S. A Dynamic Programming Model for Operation Decision-Making in Bicycle Sharing Systems under a Sustainable Development Perspective. Sustainability 2017, 9, 895. [Google Scholar] [CrossRef]
- Pal, A.; Zhang, Y. Free-floating bike sharing: solving real-life large-scale static rebalancing problems. Transp. Res. Part C 2017, 80, 92–116. [Google Scholar] [CrossRef]
- Clemente, M.; Fanti, M.P.; Iacobellis, G.; Ukovich, W. A discrete-event simulation approach for the management of a car sharing service. In Proceedings of the 2013 IEEE International Conference on Systems, Man, and Cybernetics (SMC 2013), Manchester, UK, 13–16 October 2013; pp. 403–408. [Google Scholar] [CrossRef]
- Clemente, M.; Fanti, M.P.; Mangini, A.M.; Ukovich, W. The Vehicle Relocation Problem in Car Sharing Systems: Modeling and Simulation in a Petri Net Framework. In Proceedings of the International Conference on Applications and Theory of Petri Nets and Concurrency, Milan, Italy, 24–28 June 2013; Springer: Berlin/Heidelberg, Germany, 2013; pp. 250–269. [Google Scholar]
- Fanti, M.; Mangini, A.; Pedroncelli, G.; Ukovich, W. A Petri Net model for fleet sizing of Electric Car Sharing Systems. In Proceedings of the 2016 13th International Workshop on Discrete Event Systems (WODES), Xi’an, China, 30 May–1 June 2016; pp. 51–56. [Google Scholar] [CrossRef]
- Labadi, K.; Benarbia, T.; Barbot, J.P.; Hamaci, S.; Omari, A. Stochastic Petri Net Modeling, Simulation and Analysis of Public Bicycle Sharing Systems. IEEE Trans. Autom. Sci. Eng. 2015, 12, 1380–1395. [Google Scholar] [CrossRef]
- Febbraro, A.; Sacco, N.; Saeednia, M. One-Way Carsharing Solving the Relocation Problem. Transp. Res. Rec. 2012, 2319, 113–120. [Google Scholar] [CrossRef]
- Kaspi, M.; Raviv, T.; Tzur, M. Parking reservation policies in one-way vehicle sharing systems. Transp. Res. Part B 2014, 62, 35–50. [Google Scholar] [CrossRef]
- Barth, M.; Todd, M. Simulation model performance analysis of a multiple station shared vehicle system. Transp. Res. Part C 1999, 7, 237–259. [Google Scholar] [CrossRef]
- Fishman, G.S. Discrete-Event Simulation Modeling, Programming, and Analysis, 1st ed.; Springer: New York, NY, USA, 2001. [Google Scholar]
- Baskett, F.; Chandy, K.; Muntz, R.; Palacios-Gomez, F. Open, closed, and mixed networks of queues with different classes of customers. J. Assoc. Comput. Mach. 1975, 22, 248–260. [Google Scholar] [CrossRef]
- George, D.K.; Xia, C.H. Fleet-sizing and service availability for a vehicle rental system via closed queueing networks. Eur. J. Oper. Res. 2011, 211, 198–207. [Google Scholar] [CrossRef]
- Fanti, M.P.; Mangini, A.M.; Pedroncelli, G.; Ukovich, W. Fleet sizing for electric car sharing system via closed queueing networks. In Proceedings of the 2014 IEEE International Conference on Systems, Man and Cybernetics (SMC), San Diego, CA, USA, 5–8 October 2014; pp. 1324–1329. [Google Scholar] [CrossRef]
- Fricker, C.; Gast, N. Incentives and redistribution in homogeneous bike-sharing systems with stations of finite capacity. EURO J. Transp. Logist. 2014, 5, 261–291. [Google Scholar] [CrossRef] [Green Version]
- ter Beek, M.H.; Gnesi, S.; Latella, D.; Massink, M. Towards Automatic Decision Support for Bike-Sharing System Design. In Proceedings of the International Conference on Software Engineering and Formal Methods, York, UK, 7–8 September 2015; Bianculli, D., Calinescu, R., Rumpe, B., Eds.; Springer: Berlin/Heidelberg, Germany, 2015; Volume 9509, pp. 266–280. [Google Scholar] [CrossRef]
- Fricker, C.; Bourdais, C. A Stochastic Model for Car-Sharing Systems. arXiv, 2015; arXiv:1504.03844. [Google Scholar]
- Fricker, C.; Gast, N.; Mohamed, H. Mean field analysis for inhomogeneous bike sharing systems. In Proceedings of the DMTCS 2012, Montreal, QC, Canada, 18–22 June 2012; pp. 365–376. [Google Scholar]
- Fricker, C.; Servel, N. Two-choice regulation in heterogeneous closed networks. Queueing Syst. 2016, 82, 173–197. [Google Scholar] [CrossRef]
- Opper, M.; Saad, D. Advanced Mean Field Methods: Theory and Practice; The MIT Press: London, UK, 2001; p. 300. [Google Scholar]
- George, D. Stochastic Modeling and Decentralized Control Policies for Large-Scale Vehicle Sharing Systems via Closed Queueing Networks. Ph.D. Thesis, The Ohio State University, Columbus, OH, USA, 2012. [Google Scholar]
- Kouvatsos, D.D.; Xenios, N.P. MEM for Arbitrary Queueing Networks with Multiple General Servers and Repetitive-service Blocking. Perform. Eval. 1989, 10, 169–195. [Google Scholar] [CrossRef]
- Jaynes, E.T. Information Theory and Statistical Mechanics. Phys. Rev. 1957, 106, 620. [Google Scholar] [CrossRef]
- Bose, S.K. An Introduction to Queueing Systems, 1st ed.; Springer: New York, NY, USA, 2013; p. 287. [Google Scholar]
- Kouvatsos, D.D. Entropy maximisation and queueing network models. Ann. Oper. Res. 1994, 48, 63–126. [Google Scholar] [CrossRef]
- Bolch, G.; Greiner, S.; de Meer, H.; Trivedi, K. Queueing Networks and Markov Chains, 2nd ed.; John Wiley & Sons: New York, NY, USA, 2006; p. 878. [Google Scholar]
- Steffan, D. Vélib’ La Ville est Plus Belle à Vélo; Mairie de Paris: Paris, France, 2012.
- Feng, Y.; Affonso, R.C.; Zolghadri, M. Analysis of bike sharing system by clustering: The Vélib’ case. IFAC-PapersOnLine 2017, 50, 12422–12427. [Google Scholar] [CrossRef]
- Institute for Transportation & Development Policy. The Bike-Sharing Planning Guide; Institute for Transportation & Development Policy: New York, NY, USA, 2013. [Google Scholar]
- Reiser, M.; Kobayashi, H. Queuing Networks with Multiple Closed Chains: Theory and Computational Algorithms. Queuing Netw. 1975, 19, 283–294. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Simulation-Based Techniques | Stochastic Approaches | |
|---|---|---|
| Monitoring | [22,23,25,26,28] | [33,39] |
| Design/re-design | [24,27] | [31,33,34,35,36,37] |
| Main Advantages |
|
|
| Main Drawbacks |
|
|
| Index | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
| Queue | SS1 | SS2 | MSB1 | MSB2 | MS11 | MS12 | MS22 | MS21 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Samet, B.; Couffin, F.; Zolghadri, M.; Barkallah, M.; Haddar, M. Performance Analysis and Improvement of the Bike Sharing System Using Closed Queuing Networks with Blocking Mechanism. Sustainability 2018, 10, 4663. https://doi.org/10.3390/su10124663
Samet B, Couffin F, Zolghadri M, Barkallah M, Haddar M. Performance Analysis and Improvement of the Bike Sharing System Using Closed Queuing Networks with Blocking Mechanism. Sustainability. 2018; 10(12):4663. https://doi.org/10.3390/su10124663
Chicago/Turabian StyleSamet, Bacem, Florent Couffin, Marc Zolghadri, Maher Barkallah, and Mohamed Haddar. 2018. "Performance Analysis and Improvement of the Bike Sharing System Using Closed Queuing Networks with Blocking Mechanism" Sustainability 10, no. 12: 4663. https://doi.org/10.3390/su10124663