
A Novel Smart Shoe Instrumented with Sensors for Quantifying Foot Placement and Clearance during Stair Negotiation


Abstract
:1. Introduction
2. Materials and Methods
2.1. System Design
2.2. Instrumented Insole Design to Measure Foot Contact Length
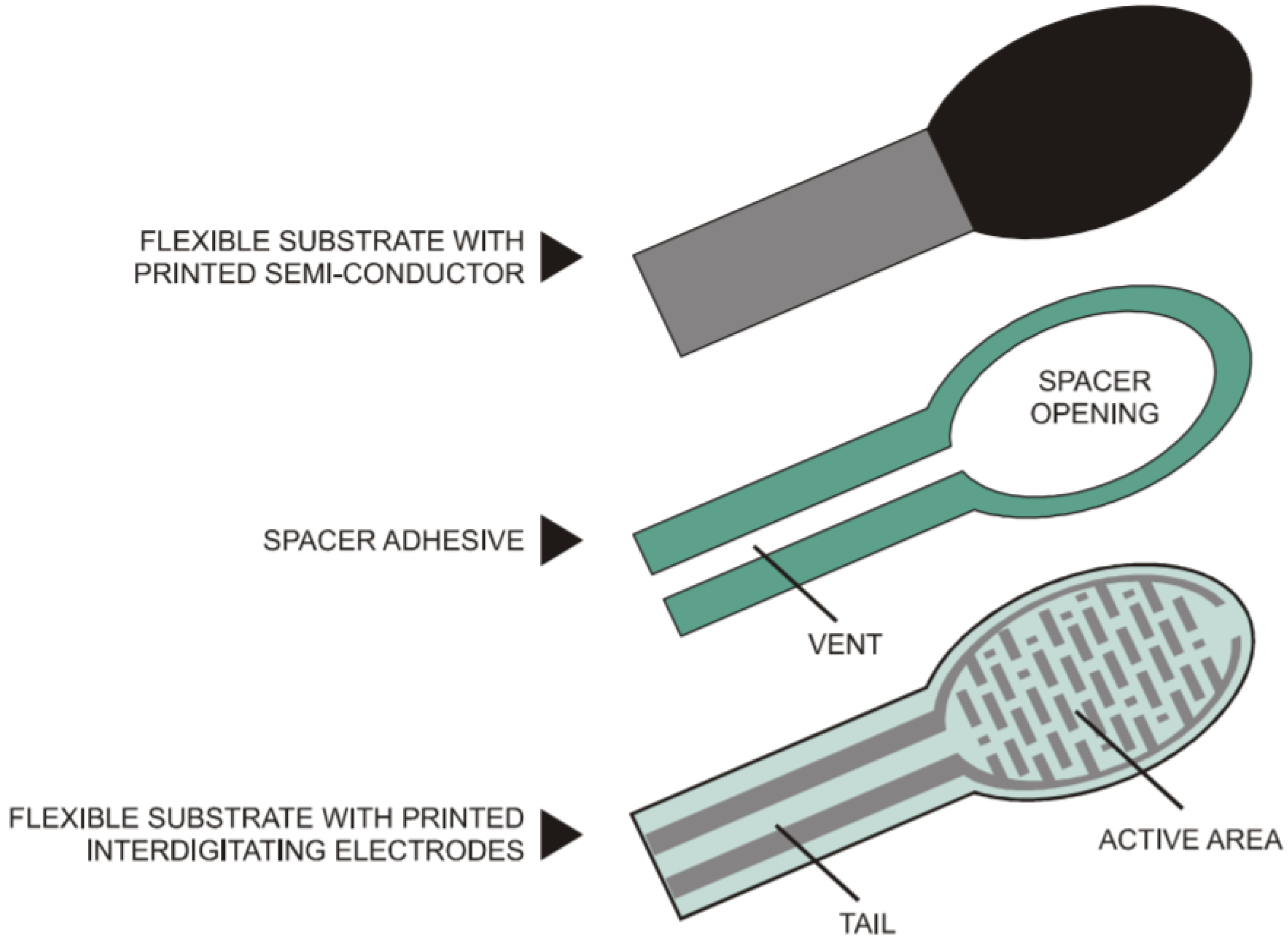
FSR Working Principle
2.3. Instrumented Sensor Design to Measure Foot Clearance
Working Principle
3. Experiment Setup
3.1. Participants
3.2. Laboratory Measurements
3.3. Data Collection Procedure
3.4. Data Collection Using the Instrumented Shoes and the VICON System in the Custom-Made Laboratory Staircase
3.5. Data Analysis-Instrumented Insole’s Foot Placement Calculation
3.6. Data Analysis-Instrumented Shoes Foot Clearance Calculation
3.7. Data Analysis-VICON Systems Foot Placement and Foot Clearance Calculation
4. Statistics
5. Results and Discussion
- Test 1: Descending correlation coefficients (r) to quantify the relationship between sensor and VICON outputs.
- Test 2: Coefficient of determination (r2) and regressions to find the variance and best-fit lines.
- Test 3: Bland–Altman plots to check the agreement between the sensor and VICON parameters.
- Test 1: Ascending correlation coefficients (r) to quantify the relationship between sensor and VICON outputs.
- Test 2: Coefficient of determination (r2) and regressions to find the variance and best-fit lines.
- Test 3: Ascending Bland–Altman plots to check the agreement between the sensor and VICON parameters.
Difference between Ascending and Descending Correlation and Agreement Results
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Lord, S.R.; Ward, J.A.; Williams, P.; Anstey, K.J. An epidemiological study of falls in older community-dwelling women: The Randwick falls and fractures study. Aust. J. Public Health 1993, 17, 240–245. [Google Scholar] [CrossRef] [PubMed]
- Cumming, R.G.; Salkeld, G.; Thomas, M.; Szonyi, G. Prospective Study of the Impact of Fear of Falling on Activities of Daily Living, SF-36 Scores, and Nursing Home Admission. J. Gerontol. Ser. A Biol. Sci. Med. Sci. 2000, 55, M299–M305. [Google Scholar] [CrossRef] [PubMed]
- Jacobs, J.V. A review of stairway falls and stair negotiation: Lessons learned and future needs to reduce injury. Gait Posture 2016, 49, 159–167. [Google Scholar] [CrossRef] [PubMed]
- Startzell, J.K.; Owens, D.A.; Mulfinger, L.M.; Cavanagh, P.R. Stair Negotiation in Older People: A Review. J. Am. Geriatr. Soc. 2000, 48, 567–580. [Google Scholar] [CrossRef] [PubMed]
- Stop Falling: Start Saving Lives and Money; Age UK: London, UK, 2010.
- Ackermans, T.M.; Francksen, N.C.; Casana-Eslava, R.V.; Lees, C.; Baltzopoulos, V.; Lisboa, P.J.; Hollands, M.A.; O’Brien, T.D.; Maganaris, C.N. A novel multivariate approach for biomechanical profiling of stair negotiation. Exp. Gerontol. 2019, 124, 110646. [Google Scholar] [CrossRef] [PubMed]
- Roys, M.; Wright, M. Minor variations in gait and their effect on stair safety. In Proceedings of the Contemporary Ergonomics 2005: International Conference on Contemporary Ergonomics (CE2005), Hatfield, UK, 5–7 April 2005. [Google Scholar]
- Francksen, N.C.; Ackermans, T.M.; Holzer, D.; Ebner, S.A.; Maganaris, C.N.; Hollands, M.A.; Karamanidis, K.; Roys, M.; O’Brien, T.D. Negotiating stairs with an inconsistent riser: Implications for stepping safety. Appl. Ergon. 2020, 87, 103131. [Google Scholar] [CrossRef] [PubMed]
- Kesler, R.M.; Horn, G.P.; Rosengren, K.S.; Hsiao-Wecksler, E.T. Analysis of foot clearance in firefighters during ascent and descent of stairs. Appl. Ergon. 2016, 52, 18–23. [Google Scholar] [CrossRef] [PubMed]
- Hamel, K.A.; Okita, N.; Higginson, J.S.; Cavanagh, P.R. Foot clearance during stair descent: Effects of age and illumination. Gait Posture 2005, 21, 135–140. [Google Scholar] [CrossRef] [PubMed]
- Grandez, K.; Bustamante, P.; Solas, G.; Gurutzeaga, I.; Garcia-Alonso, A. Wearable wireless sensor for the gait monitorization of Parkinsonian patients. In Proceedings of the 16th IEEE International Conference on Electronics, Circuits and Systems (ICECS 2009), Yasmine Hammamet, Tunisia, 13–16 December 2009; pp. 215–218. [Google Scholar]
- Yip, S.; Prieto, T. A system for force distribution measurement beneath the feet. In Proceedings of the 15th Southern Biomedical Engineering Conference, Dayton, OH, USA, 29–31 March 1996. [Google Scholar]
- Yang, C.M.; Chou, C.M.; Hu, J.S.; Hung, S.H.; Yang, C.H.; Wu, C.C.; Hsu, M.Y.; Yang, T.L. A wireless gait analysis system by digital textile sensors. In Proceedings of the 2009 Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Minneapolis, MN, USA, 3–6 September 2009. [Google Scholar]
- Benbasat, A.; Morris, S.; Paradiso, J. A wireless modular sensor architecture and its application in on-shoe gait analysis. In Proceedings of the IEEE Sensors 2003, Toronto, ON, Canada, 22–24 October 2003. [Google Scholar]
- Aminian, K.; Najafi, B. Capturing human motion using body-fixed sensors: Outdoor measurement and clinical applications. Comput. Animat. Virtual Worlds 2004, 15, 79–94. [Google Scholar] [CrossRef]
- Lamb, S.E.; Jørstad-Stein, E.C.; Hauer, K.; Becker, C.; on behalf of the Prevention of Falls Network Europe and Outcomes Consensus Group. Development of a Common Outcome Data Set for Fall Injury Prevention Trials: The Prevention of Falls Network Europe Consensus. J. Am. Geriatr. Soc. 2005, 53, 1618–1622. [Google Scholar] [CrossRef] [PubMed]
- Wahab, Y. Design and Implementation of MEMS Biomechanical Sensors for Real-Life Measurements of Gait Parameters. Ph.D. Thesis, Victoria University, Footscray, VIC, Australia, 2009. [Google Scholar]
- Hamel, K.A.; Cavanagh, P.R. Stair Performance in People Aged 75 and Older. J. Am. Geriatr. Soc. 2004, 52, 563–567. [Google Scholar] [CrossRef] [PubMed]
- Zhao, G.; Chen, L.; Ning, H. Sensor-Based Fall Risk Assessment: A Survey. Healthcare 2021, 9, 1448. [Google Scholar] [CrossRef] [PubMed]
- Subramaniam, S.; Faisal, A.I.; Deen, M.J. Wearable Sensor Systems for Fall Risk Assessment: A Review. Front. Digit. Health 2022, 4, 921506. [Google Scholar] [CrossRef] [PubMed]
- Interlink Electronics. FSR Force Sensing Resistor―Integration Guide and Evaluation Parts Catalog, 400 Series Evaluation Parts with Suggested Electrical Interfaces. 2010. Available online: https://www.sparkfun.com/datasheets/Sensors/Pressure/fsrguide.pdf (accessed on 3 January 2023).
- Selvaraj, M.; Baltzopoulos, V.; Shaw, A.; Maganaris, C.; Cullen, J.; O’Brien, T.; Kot, P. Stair Fall Risk Detection Using Wearable Sensors. In Proceedings of the 11th International Conference on Developments in eSystems Engineering (DeSE), Cambridge, UK, 2–5 September 2018. [Google Scholar]
- STMicroelectronics. vl6180X. 2010. Available online: https://www.st.com/resource/en/user_manual/dm00247018-vl6180x-proximity-gesture-and-ambient-light-sensing-als-module-stmicroelectronics.pdf (accessed on 4 August 2023).
- Bertuletti, S.; Cereatti, A.; Caldara, M.; Della Croce, U. Measurement of the inter-foot distance using a Time-of-Flight proximity sensor: Preliminary evaluation during leg oscillation exercises. In Proceedings of the GNB Conference, Naples, Italy, 20–22 June 2016. [Google Scholar]
- Bland, J.M.; Altman, D.G. Statistical methods for assessing agreement between two methods of clinical measurement. Lancet 1986, 327, 307–310. [Google Scholar] [CrossRef]
- Giavarina, D. Understanding Bland Altman analysis. Biochem. Med. 2015, 25, 141–151. [Google Scholar] [CrossRef] [PubMed]


























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Force sensitivity range | <100 g to >10 kg depending on mechanics |
| Pressure sensitivity range | <0.1 kg/cm2 to >10 kg/cm2 |
| Part-to-part repeatability | ±15% to 25% of established nominal resistance |
| Single part repeatability | ±2% to 5% of established nominal resistance |
| Current consumption | 1 mA/cm2 of applied force |
| Resolution | 0.5% full scale |
| Temperature Range | −30 °C to +70 °C |
| Sensitivity to noise/vibration | Not significantly affected |
| Devices rise time | 1.2 ms |
| Lifetime | >10 million actuations |
| Hysteresis | +10% average |
| Feature | Details |
|---|---|
| Size | 0.5″ × 0.7″ × 0.085″ (13 mm × 18 mm × 2 mm) |
| Mass | 0.5 g (0.02 oz) |
| Operating voltage | 2.7 V to 5.5 V |
| Output format (I²C) | 8-bit distance reading |
| Distance measuring range | 0 mm to 250 mm |
| Resolution | 1 mm |
| Temperature-dependent drift | 15 mm |
| Accuracy | ±3 mm |
| Noise | 2.0 mm maximum |
| Frequency | 30 Hz |
| Laser-Infrared Emitter | 850 nm |
| Foot Placement % Ascend | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Shoe Size | 10th FSR | 9th FSR | 8th FSR | 7th FSR | 6th FSR | 5th FSR | 4th FSR | 3rd FSR | 2nd FSR | 1st FSR |
| 6 | No FSR | No FSR | No FSR | No FSR | 100 | 83 | 66 | 49 | 32 | 15 |
| 7 | No FSR | No FSR | No FSR | 100 | 86 | 72 | 57 | 43 | 29 | 15 |
| 8 | No FSR | No FSR | 100 | 88 | 75 | 63 | 50 | 38 | 25 | 13 |
| 9 | No FSR | 100 | 89 | 78 | 67 | 56 | 45 | 34 | 23 | 12 |
| 10 | 100 | 90 | 80 | 70 | 60 | 50 | 40 | 30 | 20 | 10 |
| Foot Placement % Descend | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Shoe Size | 1st FSR | 2nd FSR | 3rd FSR | 4th FSR | 5th FSR | 6th FSR | 7th FSR | 8th FSR | 9th FSR | 10th FSR |
| 6 | 100 | 83 | 66 | 49 | 32 | 15 | No FSR | No FSR | No FSR | No FSR |
| 7 | 100 | 86 | 72 | 57 | 43 | 29 | 15 | No FSR | No FSR | No FSR |
| 8 | 100 | 88 | 75 | 63 | 50 | 38 | 25 | 13 | No FSR | No FSR |
| 9 | 100 | 89 | 78 | 67 | 56 | 45 | 34 | 23 | 12 | No FSR |
| 10 | 100 | 90 | 80 | 70 | 60 | 50 | 40 | 30 | 20 | 10 |
| Pearson Correlations | |||
|---|---|---|---|
| Foot Placement VICON | Foot Placement SENSOR | ||
| Foot placement for VICON | Pearson Correlation | 1 | 0.878 ** |
| Sig. (2-tailed) | 0.000 | ||
| N | 100 | 100 | |
| Foot placement for sensor | Pearson Correlation | 0.878 ** | 1 |
| Sig. (2-tailed) | 0.000 | ||
| N | 100 | 100 | |
| Pearson Correlations(r) | |||
|---|---|---|---|
| Foot Clearance VICON | Foot Clearance SENSOR | ||
| Foot Clearance VICON | Pearson Correlation | 1 | 0.967 ** |
| Sig. (2-tailed) | 0.000 | ||
| N | 175 | 175 | |
| Foot Clearance SENSOR | Pearson Correlation | 0.967 ** | 1 |
| Sig. (2-tailed) | 0.000 | ||
| N | 175 | 175 | |
| Pearson Correlations | |||
|---|---|---|---|
| Sensor Foot Contact Length | VICON Foot Contact Length | ||
| Foot contact length for Sensor | Pearson Correlation | 1 | 0.838 ** |
| Sig. (2-tailed) | <0.01 | ||
| N | 100 | 100 | |
| Foot placement for Vicon | Pearson Correlation | 0.838 ** | 1 |
| Sig. (2-tailed) | <0.01 | ||
| N | 100 | 100 | |
| Pearson Correlations(r) | |||
|---|---|---|---|
| Foot Clearance VICON | Foot Clearance Sensor | ||
| Foot Clearance VICON | Pearson Correlation | 1 | 0.843 ** |
| Sig. (2-tailed) | <0.01 | ||
| N | 175 | 175 | |
| Foot Clearance SENSOR | Pearson Correlation | 0.843 ** | 1 |
| Sig. (2-tailed) | <0.01 | ||
| N | 175 | 175 | |
| Negotiation | Descending | Ascending |
|---|---|---|
| Foot placement ratio | R = 0.878 | R = 0.838 |
| Overall r2 = 0.77 | Overall r2 = 0.70 | |
| Forceplate1 r2 = 0.68 | Forceplate1 r2 = 0.70 | |
| Forceplate2 r2 = 0.77 | Forceplate2 r2 = 0.74 | |
| Forceplate3 r2 = 0.68 | Forceplate3 r2 = 0.65 | |
| Forceplate4 r2 = 0.65 | Forceplate4 r2 = 0.72 | |
| Bias = −2% | Bias = −0.8% | |
| Upper limit = 10% | Upper limit = 6.3% | |
| Lower limit = −13.9% | Lower limit = −7.9% | |
| Foot clearance | R = 0.967 | R = 0.843 |
| Step 1 r2 = 0.87 | Step 1 r2 = 0.79 | |
| Step 2 r2 = 0.71 | Step 2 r2 = 0.69 | |
| Step 3 r2 = 0.91 | Step 3 r2 = 0.80 | |
| Step 4 r2 = 0.84 | Step 4 r2 = 0.75 | |
| Step 5 r2 = 0.85 | Step 5 r2 = 0.71 | |
| Step 6 r2 = 0.72 | Step 6 r2 = 0.73 | |
| Step 7 r2 = 0.92 | Step 7 r2 = 0.70 | |
| Overall r2 = 0.96 | Overall r2 = 0.71 | |
| Bias = 0.1 mm | Bias = 2.1 mm | |
| Upper limit = 4.8 mm | Upper limit = 10.2 mm | |
| Lower limit = −4.7 mm | Lower limit = −5.9 mm |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ram, M.; Baltzopoulos, V.; Shaw, A.; Maganaris, C.N.; Cullen, J.; O’Brien, T.; Kot, P. A Novel Smart Shoe Instrumented with Sensors for Quantifying Foot Placement and Clearance during Stair Negotiation. Sensors 2023, 23, 9638. https://doi.org/10.3390/s23249638
Ram M, Baltzopoulos V, Shaw A, Maganaris CN, Cullen J, O’Brien T, Kot P. A Novel Smart Shoe Instrumented with Sensors for Quantifying Foot Placement and Clearance during Stair Negotiation. Sensors. 2023; 23(24):9638. https://doi.org/10.3390/s23249638
Chicago/Turabian StyleRam, Malarvizhi, Vasilios Baltzopoulos, Andy Shaw, Constantinos N. Maganaris, Jeff Cullen, Thomas O’Brien, and Patryk Kot. 2023. "A Novel Smart Shoe Instrumented with Sensors for Quantifying Foot Placement and Clearance during Stair Negotiation" Sensors 23, no. 24: 9638. https://doi.org/10.3390/s23249638