
The SALT—Readout ASIC for Silicon Strip Sensors of Upstream Tracker in the Upgraded LHCb Experiment

 , , , , , , , ,
, , , , , , , ,  , , , , , , , , , , , , , , , , , , , , ,
, , , , , , , , , , , , , , , , , , , , ,  , , , , , , add
Show full author list
, , , , , , add
Show full author list
Abstract
:1. Introduction
2. Materials and Methods
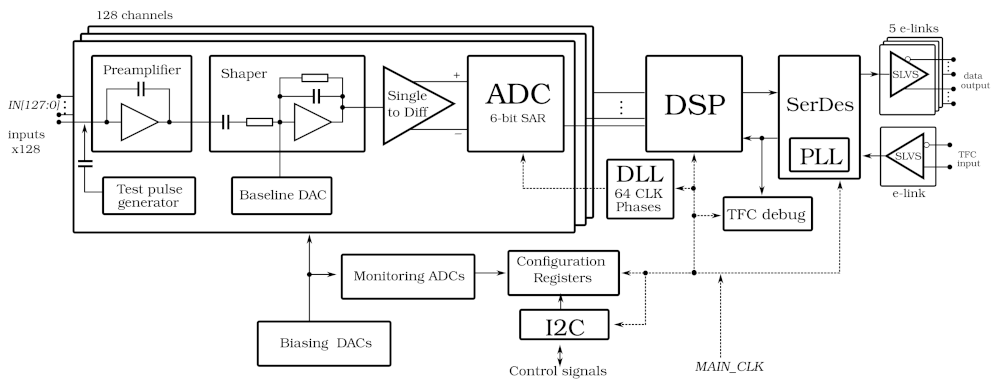
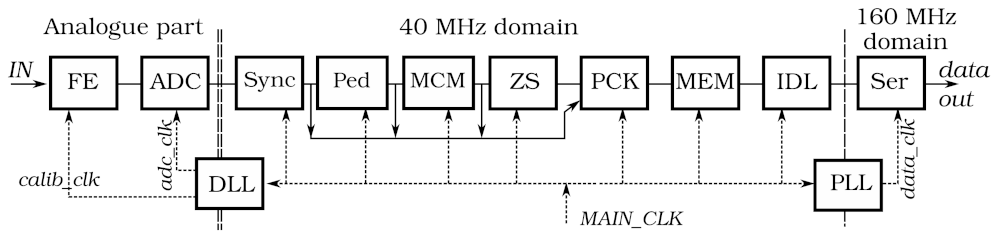
2.1. SALT Architecture Overview
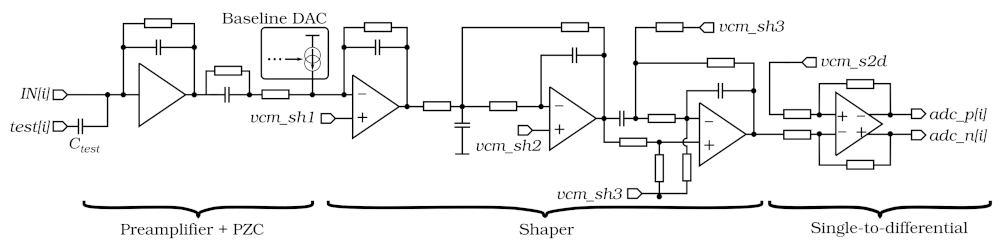
2.2. Analogue Front-End
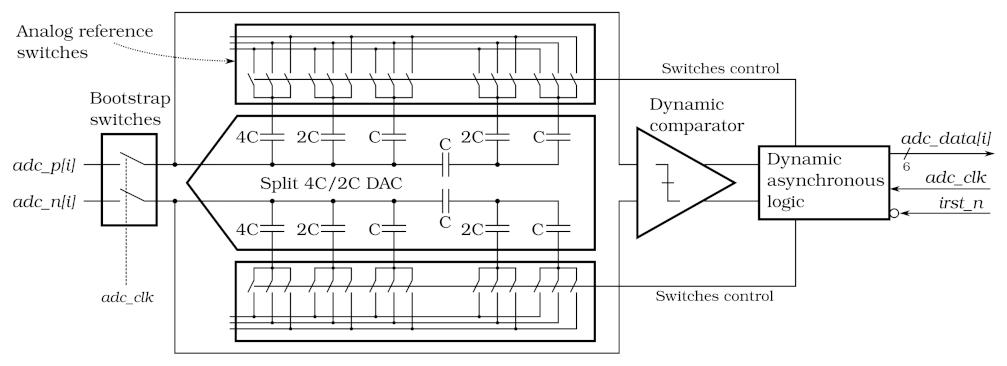
2.3. Analog-to-Digital Converter (ADC)
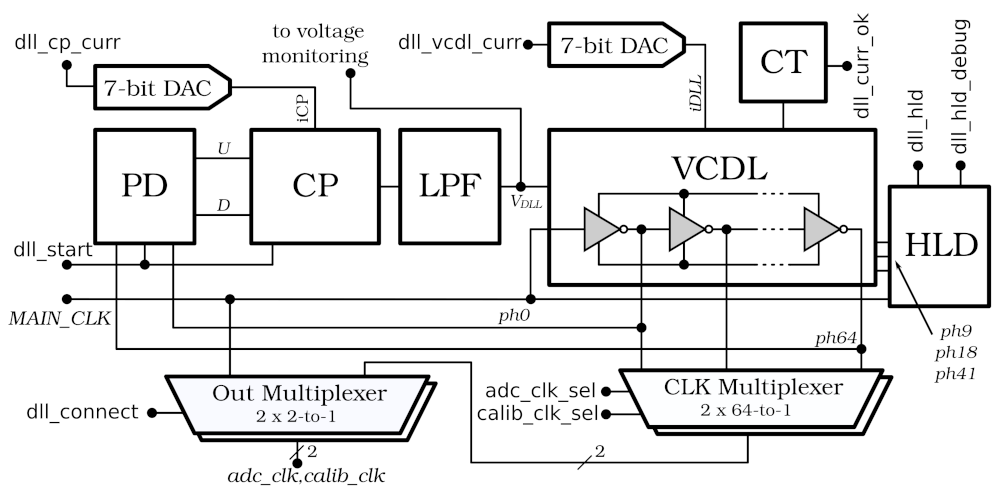
2.4. Delay-Locked Loop (DLL)
2.5. Digital Signal Processing (DSP)
2.6. Serialiser and Deserialiser (SerDes)
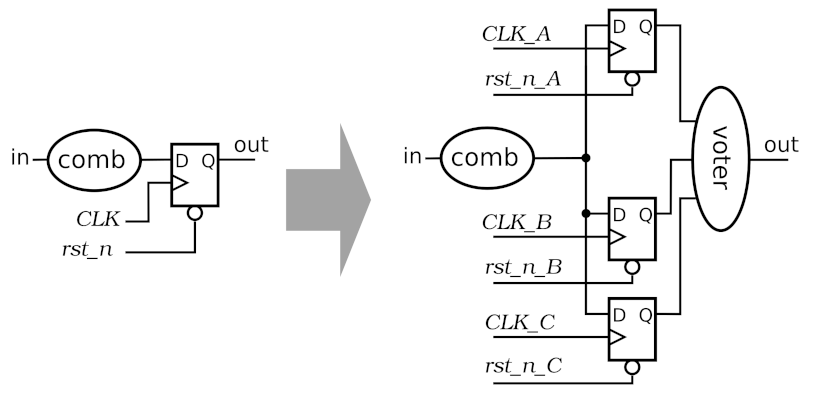
2.7. Single Event Effect (SEE) Mitigation
2.8. Internal On-Line Monitoring
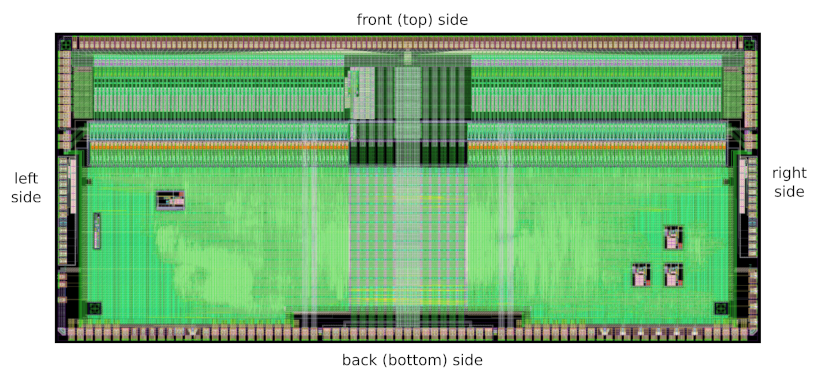
2.9. Layout and Integration
3. Results and Discussion
3.1. Digital Tests and Chip Configuration
3.2. Measurements without Sensor
3.3. Measurements with Sensor
3.4. Discussion
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- The ATLAS Collaboration; Aad, G.; Abat, E.; Abdallah, J.; Abdelalim, A.A.; Abi, B.A.; Battistoni, G.; Barnett, R.M.; Benchouk, C.; Benslama, K.; et al. The ATLAS Experiment at the CERN Large Hadron Collider. J. Instrum. 2008, 3, S08003. [Google Scholar] [CrossRef] [Green Version]
- The CMS Collaboration; Chatrchyan, S.; Hmayakyan, G.; Khachatryan, V.; Sirunyan, A.M.; Adam, W.; Bauer, T.; Bergauer, T.; Bergauer, H.; Dragicevic, M.; et al. The CMS experiment at the CERN LHC. J. Instrum. 2008, 3, S08004. [Google Scholar] [CrossRef] [Green Version]
- Belyaev, I.; Carboni, G.; Harnew, N.; Matteuzzi, C.; Teubert, F. The history of LHCb. Eur. Phys. J. H 2021, 46, 1–53. [Google Scholar] [CrossRef]
- The ALICE Collaboration; Aamodt, K.; Quintana, A.A.; Achenbach, R.; Acounis, S.; Adamová, D.; Adler, C.; Aggarwal, M.; Agnese, F.; Rinella, G.; et al. The ALICE experiment at the CERN LHC. J. Instrum. 2008, 3, S08002. [Google Scholar] [CrossRef]
- The LHCb Collaboration; Alves, A.A.; Filho, L.M.A.; Barbosa, A.F.; Bediaga, I.; Cernicchiaro, G.; Guerrer, G.; Lima, H.P.; Machado, A.A.; Magnin, J.; et al. The LHCb Detector at the LHC. J. Instrum. 2008, 3, S08005. [Google Scholar] [CrossRef]
- Bediaga, I.; Chanal, H.; Hopchev, P.; Cadeddu, S.; Stoica, S.; Calvo, G.M.; T’Jampens, S.; Machikhiliyan, I.V.; Guzik, Z.; Alves, A.A., Jr.; et al. Framework TDR for the LHCb Upgrade: Technical Design Report. Technical Report CERN-LHCC-2012-007. LHCb-TDR-12; CERN: Geneva, Switzerland, 2012. [Google Scholar]
- Bugiel, S.; Dasgupta, R.; Firlej, M.; Fiutowski, T.; Idzik, M.; Kuczynska, M.; Moron, J.; Swientek, K.; Szumlak, T. SALT, a dedicated readout chip for high precision tracking silicon strip detectors at the LHCb Upgrade. J. Instrum. 2016, 11, C02028. [Google Scholar] [CrossRef]
- Kasinski, K.; Rodriguez-Rodriguez, A.; Lehnert, J.; Zubrzycka, W.; Szczygiel, R.; Otfinowski, P.; Kleczek, R.; Schmidt, C. Characterization of the STS/MUCH-XYTER2, a 128-channel time and amplitude measurement IC for gas and silicon microstrip sensors. Nucl. Instrum. Methods Phys. Res. Sect. Accel. Spectrometers Detect. Assoc. Equip. 2018, 908, 225–235. [Google Scholar] [CrossRef]
- Idzik, M.; Firlej, M.; Fiutowski, T.; Moroń, J.; Murdzek, J.; Świentek, K. FLAME—A readout ASIC for a luminosity calorimeter at a future linear collider. In Proceedings of the Topical Workshop on Electronics for Particle Physics (TWEPP 2018), KU Leuven, Antwerpen, Belgium, 17–21 September 2018. [Google Scholar]
- Hernandez, H.; Sanches, B.; Carvalho, D.; Bregant, M.; Pabon, A.; Wilton, R.; Hernandez, R.; Oliveira Weber, T.; Couto, A.; Campos, A.; et al. A Monolithic 32-channel Front-End and DSP ASIC for Gaseous Detectors. IEEE Trans. Instrum. Meas. 2020, 69, 2686–2697. [Google Scholar] [CrossRef]
- Iakovidis, G. VMM3a, an ASIC for tracking detectors. In Proceedings of the 6th International Conference on Micro Pattern Gaseous Detectors, La Rochelle, France, 5–10 May 2019. [Google Scholar]
- Bombardi, G.; Bouyjou, F.; Delagnes, E.; Dinaucourt, P.; Dulucq, F.; Berni, M.E.; Firlej, M.; Fiutowski, T.; Gonzalez, J.; Guilloux, F.; et al. HGCROC: The front-end readout ASIC for the CMS High Granularity Calorimeter. In Proceedings of the International Conference on Technology and Instrumentation in Particle Physics (TIPP 2021), Virtual Conference, 24–28 May 2021. [Google Scholar]
- Bonacini, S.; Kloukinas, K.; Moreira, P. E-link: A Radiation-Hard Low-Power Electrical Link for Chip-to-Chip Communication. Top. Workshop Electron. Part. Phys. 2009, 422–425. [Google Scholar] [CrossRef]
- Wyllie, K.; Alessio, F.; Gaspar, C.; Jacobsson, R.; Le Gac, R.; Neufeld, N.; Schwemmer, R. Electronics Architecture of the LHCb Upgrade; Technical Report LHCb-PUB-2011-011. CERN-LHCb-PUB-2011-011; CERN: Geneva, Switzerland, 2013. [Google Scholar]
- Baumann, R. Radiation-induced soft errors in advanced semiconductor technologies. IEEE Trans. Device Mater. Reliab. 2005, 5, 305–316. [Google Scholar] [CrossRef]
- Beteta, C.A.; Bugiel, S.; Dasgupta, R.; Firlej, M.; Fiutowski, T.; Idzik, M.; Kane, C.; Moron, J.; Swientek, K.; Wang, J. 8-channel prototype of SALT readout ASIC for Upstream Tracker in the upgraded LHCb experiment. J. Instrum. 2017, 12, C02007. [Google Scholar] [CrossRef]
- Nowlin, C.H. Pulse Shaping for Nuclear Pulse Amplifiers. IEEE Trans. Nucl. Sci. 1970, 17, 226–241. [Google Scholar] [CrossRef]
- Boctor, S. Single amplifier functionally tunable low-pass-notch filter. IEEE Trans. Circuits Syst. 1975, 22, 875–881. [Google Scholar] [CrossRef]
- Hariprasath, V.; Guerber, J.; Lee, S.; Moon, U. Merged capacitor switching based SAR ADC with highest switching energy-efficiency. Electron. Lett. 2010, 46, 620–621. [Google Scholar] [CrossRef] [Green Version]
- Jeon, H.; Kim, Y.B.; Choi, M. Offset voltage analysis of dynamic latched comparator. In Proceedings of the 2011 IEEE 54th International Midwest Symposium on Circuits and Systems (MWSCAS), Seoul, Korea, 7–10 August 2011; pp. 1–4. [Google Scholar] [CrossRef]
- Dessouky, M.; Kaiser, A. Input switch configuration suitable for rail-to-rail operation of switched-opamp circuits. Electron. Lett. 1999, 35, 8–10. [Google Scholar] [CrossRef]
- Firlej, M.; Fiutowski, T.; Idzik, M.; Moron, J.; Swientek, K. A fast, low-power, 6-bit SAR ADC for readout of strip detectors in the LHCb Upgrade experiment. J. Instrum. 2014, 9, 07006. [Google Scholar] [CrossRef]
- Swientek, K.P.; Firlej, M.; Fiutowski, T.; Moron, J.; Idzik, M. A fast, low-power, multichannel 6-bit ADC ASIC with data serialization. In Proceedings of the Technology and Instrumentation in Particle Physics 2014—PoS(TIPP2014), Amsterdam, The Netherlands, 2–6 June 2014; Volume 213, p. 184. [Google Scholar] [CrossRef] [Green Version]
- Firlej, M.; Fiutowski, T.; Idzik, M.; Moron, J.; Swientek, K. Development of a low power Delay-Locked Loop in two 130 nm CMOS technologies. J. Instrum. 2016, 11, C02027. [Google Scholar] [CrossRef]
- Świentek, K.; Banachowicz, M. Design of memory subsystem for wide input data range in the SALT ASIC. In Proceedings of the 2017 MIXDES—24th International Conference “Mixed Design of Integrated Circuits and Systems”, Bydgoszcz, Poland, 22–24 June 2017; pp. 245–249. [Google Scholar] [CrossRef]
- JESD8-13, J.S. Scalable Low-Voltage Signaling for 400 mV (SLVS-400); Technical Report; JEDEC Solid State Technology Association: Arlington County, VA, USA, 2001. [Google Scholar]
- Razavi, B. RF Microelectronics; Pearson Educational International: London, UK, 2012. [Google Scholar]
- Ferlet-Cavrois, V.; Massengill, L.W.; Gouker, P. Single Event Transients in Digital CMOS—A Review. IEEE Trans. Nucl. Sci. 2013, 60, 1767–1790. [Google Scholar] [CrossRef]
- Dodd, P.; Massengill, L. Basic mechanisms and modeling of single-event upset in digital microelectronics. IEEE Trans. Nucl. Sci. 2003, 50, 583–602. [Google Scholar] [CrossRef]
- Snoeys, W.; Faccio, F.; Burns, M.; Campbell, M.; Cantatore, E.; Carrer, N.; Casagr, E.L.; Cavagnoli, A.; Dachs, C.; Di Liberto, S.; et al. Layout techniques to enhance the radiation tolerance of standard CMOS technologies demonstrated on a pixel detector readout chip. Nucl. Instrum. Methods Phys. Res. Sect. Accel. Spectrometers Detect. Assoc. Equip. 2000, 439, 349–360. [Google Scholar] [CrossRef]
- Kaufmann, M. Architecture Design for Soft Errors; Elsevier: Amsterdam, The Netherlands, 2008. [Google Scholar] [CrossRef]
- Neumann, J.V. Probabilistic Logics, Automata Studies; Princeton University Press: Princeton, NJ, USA, 1956. [Google Scholar]
- Gadlage, M.; Eaton, P.; Benedetto, J.; Turflinger, T. Comparison of heavy ion and proton induced combinatorial and sequential logic error rates in a deep submicron process. IEEE Trans. Nucl. Sci. 2005, 52, 2120–2124. [Google Scholar] [CrossRef]
- Mahatme, N.N.; Jagannathan, S.; Loveless, T.D.; Massengill, L.W.; Bhuva, B.L.; Wen, S.J.; Wong, R. Comparison of Combinational and Sequential Error Rates for a Deep Submicron Process. IEEE Trans. Nucl. Sci. 2011, 58, 2719–2725. [Google Scholar] [CrossRef]
- Swientek, K. Single Event Effect Mitigation Techniques in Readout ASICs for Particle Detectors in High Energy Physics. In Proceedings of the 2018 International Conference on Signals and Electronic Systems (ICSES), Mickiewicza, Poland, 10–12 September 2018; pp. 53–57. [Google Scholar] [CrossRef]
- Alessio, F.; Jacobsson, R. Readout Control Specifications for the Front-End and Back-End of the LHCb Upgrade; Technical Report LHCb-PUB-2012-017. CERN-LHCb-PUB-2012-017. LHCb-INT-2012-018; CERN: Geneva, Switzerland, 2014. [Google Scholar]
- Yeh, W.K.; Chen, S.M.; Fang, Y.K. Substrate noise-coupling characterization and efficient suppression in CMOS technology. IEEE Trans. Electron Devices 2004, 51, 817–819. [Google Scholar] [CrossRef]
- Martin Lesma, R.; Alessio, F.; Barbosa, J.; Baron, S.; Caplan, C.; Leitao, P.; Pecoraro, C.; Porret, D.; Wyllie, K. The Versatile Link Demo Board (VLDB). JINST 2017, 12, C02020. [Google Scholar] [CrossRef] [Green Version]
- Granado Cardoso, L.; Gaspar, C.; Viana Barbosa, J.; Alessio, F.; Jost, B.; Neufeld, N.; Frank, M.; Schwemmer, R.; Durante, P. LHCb MiniDAQ control system. EPJ Web Conf. 2019, 214, 01005. [Google Scholar] [CrossRef] [Green Version]
- Abba, A.; Artuso, M.; Blusk, S.R.; Bursche, A.; Davis, A.; Dendek, A.M.; Dey, B.; Ely, S.E.; Forshaw, D.C.; Fu, J.; et al. Study of Prototype Sensors for the Upstream Tracker Upgrade; Technical Report LHCb-PUB-2016-007. CERN-LHCb-PUB-2016-007; CERN: Geneva, Switzerland, 2016. [Google Scholar]
- Ablyazimov, T.; Abuhoza, A.; Adak, R. Challenges in QCD matter physics–The scientific programme of the Compressed Baryonic Matter experiment at FAIR. Eur. Phys. J. A 2017, 53. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variable | Specification |
|---|---|
| Technology | CMOS 130 nm |
| Channels per ASIC | 128 |
| Power dissipation per channel | <6 mW |
| Radiation hardness | 30 Mrad TID + TMR against SEE effects |
| Sensor input capacitance | 1.6–12 pF |
| Signal to Noise ratio | >10 for MIP |
| Input signal polarity | Both, positive and negative |
| Dynamic range | Input charge up to ∼30,000 e |
| Pulse shape and tail | 25 ns, tail after 2 × T ∼5% amplitude |
| ADC bits | 6 bits (5 bits for each polarity) |
| ADC sampling rate | 40 MHz |
| DSP functions | Pedestal and common mode subtraction, zero suppression |
| Output data interface | Five serial links @ 320 Mbit/s (SLVS standard) |
| Slow controls interface | I2C |
| Header | Data | |||||
|---|---|---|---|---|---|---|
| Packet | BXID | Parity | Type + Length | Comment | ||
| 4-bit | 1-bit | 1-bit | 6-bit | 12·k-bit | ||
| BxVeto | bxid[3:0] | * | 1 | 010001 | — | BxVeto in TFC |
| HeaderOnly | bxid[3:0] | * | 1 | 010010 | — | Header in TFC |
| BusyEvent | bxid[3:0] | * | 1 | 010011 | — | nHits > 63 |
| BufferFull | bxid[3:0] | * | 1 | 010100 | — | no space in mem. |
| BufferFullN | bxid[3:0] | * | 1 | 010101 | — | no space in mem. |
| NZS | bxid[3:0] | * | 1 | 000110 | Values | NZS in TFC |
| Normal | bxid[3:0] | * | 0 | nHits | Hits | Normal event |
| Sync | bxid[11:0] | pattern | Synch in TFC | |||
| Chip Name | SALT | SAMPA | SMX2 |
|---|---|---|---|
| (This Work) | [10] | [8] | |
| Detector type | SST | TPC/MCH | SST/MCH |
| Technology node [nm] | 130 | 130 | 180 |
| No of channels | 128 | 32 | 128 |
| Sensor capacitance [pF] | 1.6–12 | 18.5, 40–80 | ≤50 |
| Signal polarity | both | both | both |
| Shaping | complex poles&zeros | CR–RC | CR–RC |
| Peaking time [ns] | 25 | 160, 300 | 80–270 |
| Sampling rate [MHz] | 40 | 5–10 | 0.5 |
| ADC architecture | SAR | SAR | Flash |
| ADC resolution [bit] | 6 | 10 | 5 |
| Power/channel [mW] | 3.5 | 8.3 | 8 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Abellan Beteta, C.; Andreou, D.; Artuso, M.; Beiter, A.; Blusk, S.; Bugiel, R.; Bugiel, S.; Carbone, A.; Carli, I.; Chen, B.; et al. The SALT—Readout ASIC for Silicon Strip Sensors of Upstream Tracker in the Upgraded LHCb Experiment. Sensors 2022, 22, 107. https://doi.org/10.3390/s22010107
Abellan Beteta C, Andreou D, Artuso M, Beiter A, Blusk S, Bugiel R, Bugiel S, Carbone A, Carli I, Chen B, et al. The SALT—Readout ASIC for Silicon Strip Sensors of Upstream Tracker in the Upgraded LHCb Experiment. Sensors. 2022; 22(1):107. https://doi.org/10.3390/s22010107
Chicago/Turabian StyleAbellan Beteta, Carlos, Dimitra Andreou, Marina Artuso, Andy Beiter, Steven Blusk, Roma Bugiel, Szymon Bugiel, Antonio Carbone, Ina Carli, Bo Chen, and et al. 2022. "The SALT—Readout ASIC for Silicon Strip Sensors of Upstream Tracker in the Upgraded LHCb Experiment" Sensors 22, no. 1: 107. https://doi.org/10.3390/s22010107