
Quantitative and Comparative Analysis of Effectivity and Robustness for Enhanced and Optimized Non-Local Mean Filter Combining Pixel and Patch Information on MR Images of Musculoskeletal System

 , ,
, , 
Abstract
:1. Introduction
2. Recent Work
3. Materials and Methods
3.1. Original RNLM Algorithm
3.2. RNLM Algorithm with Patch and Similarity Information
4. Results
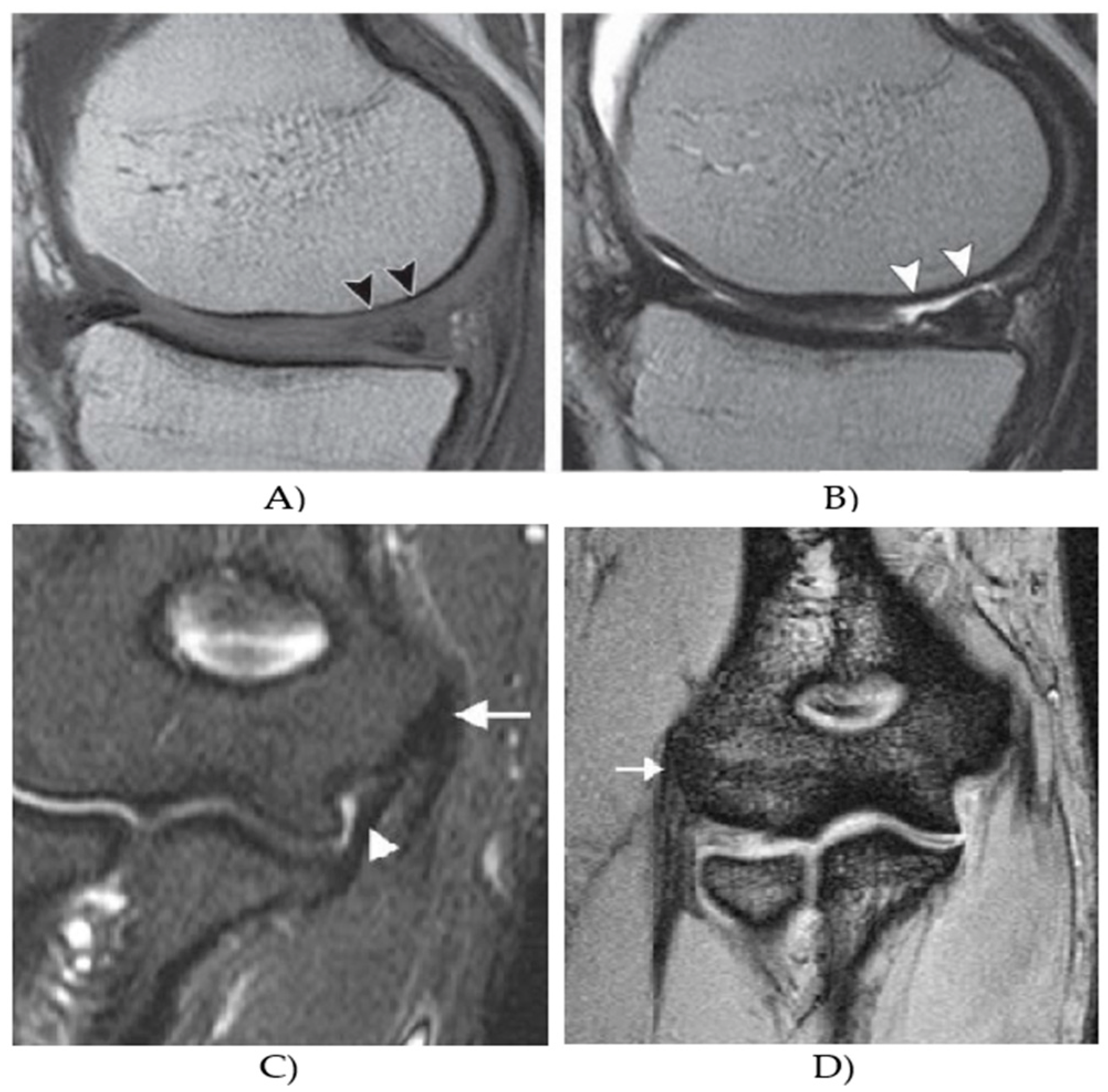
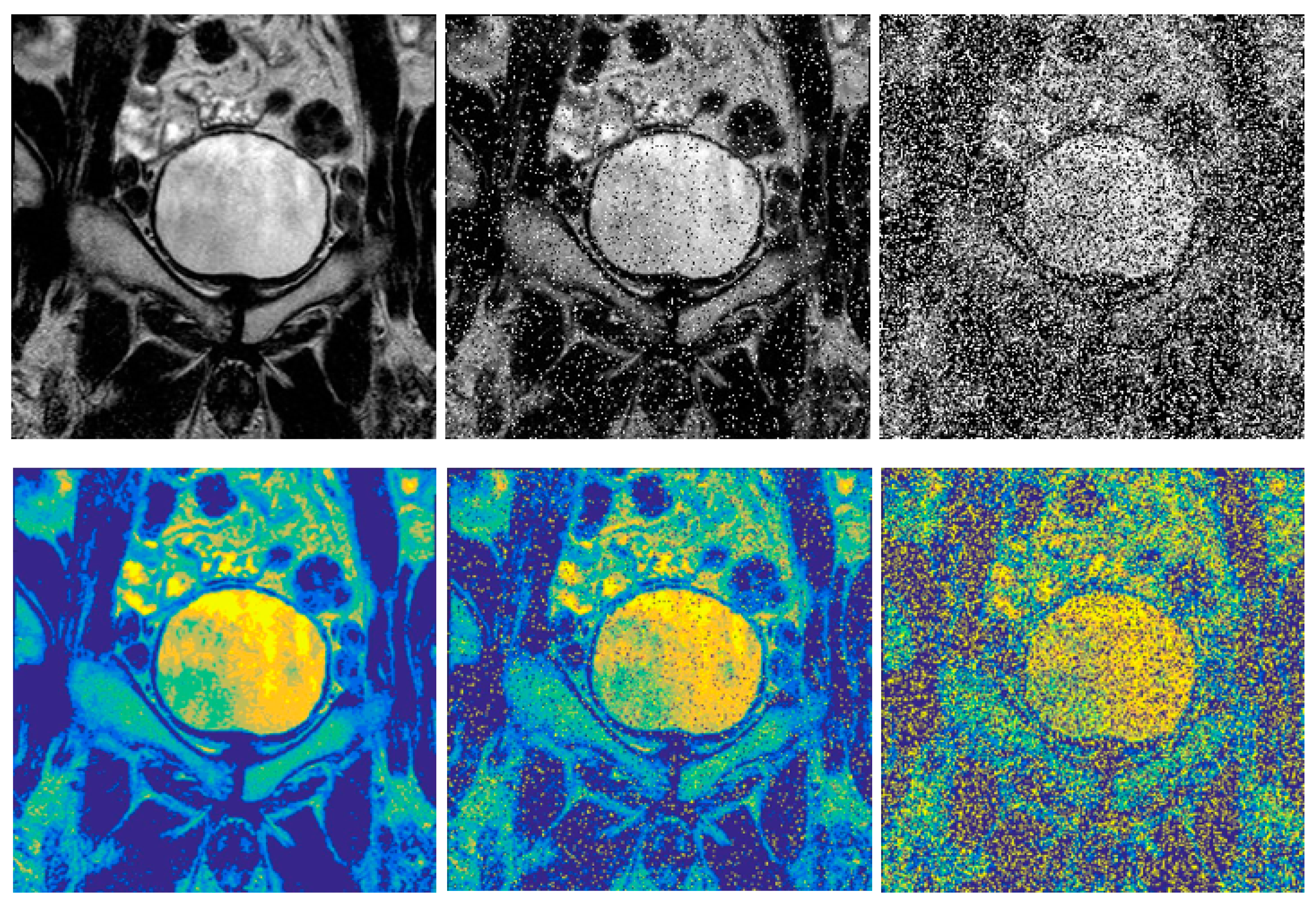
4.1. Musculoskeletal MR Images
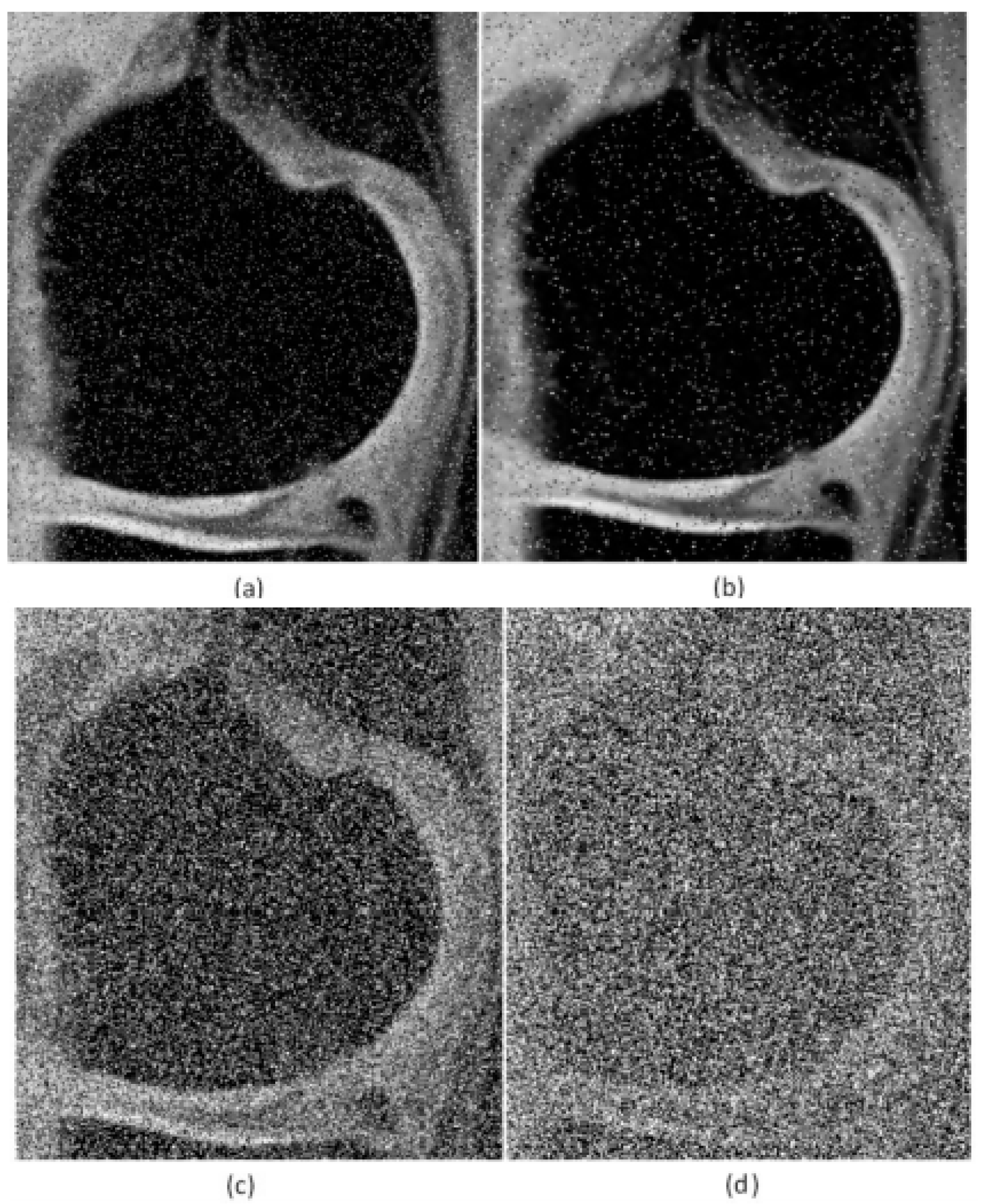
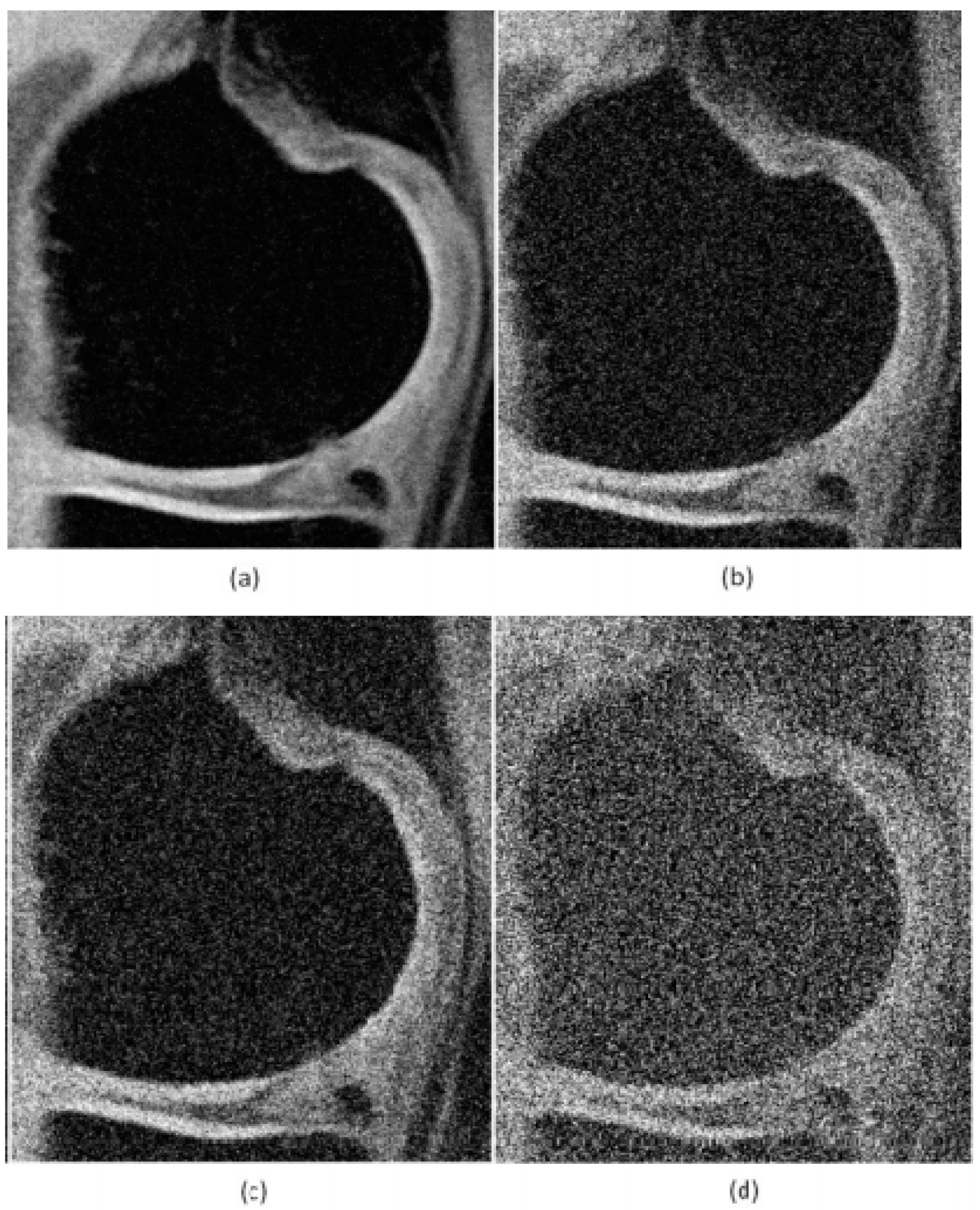
4.2. Additive Noise Generators
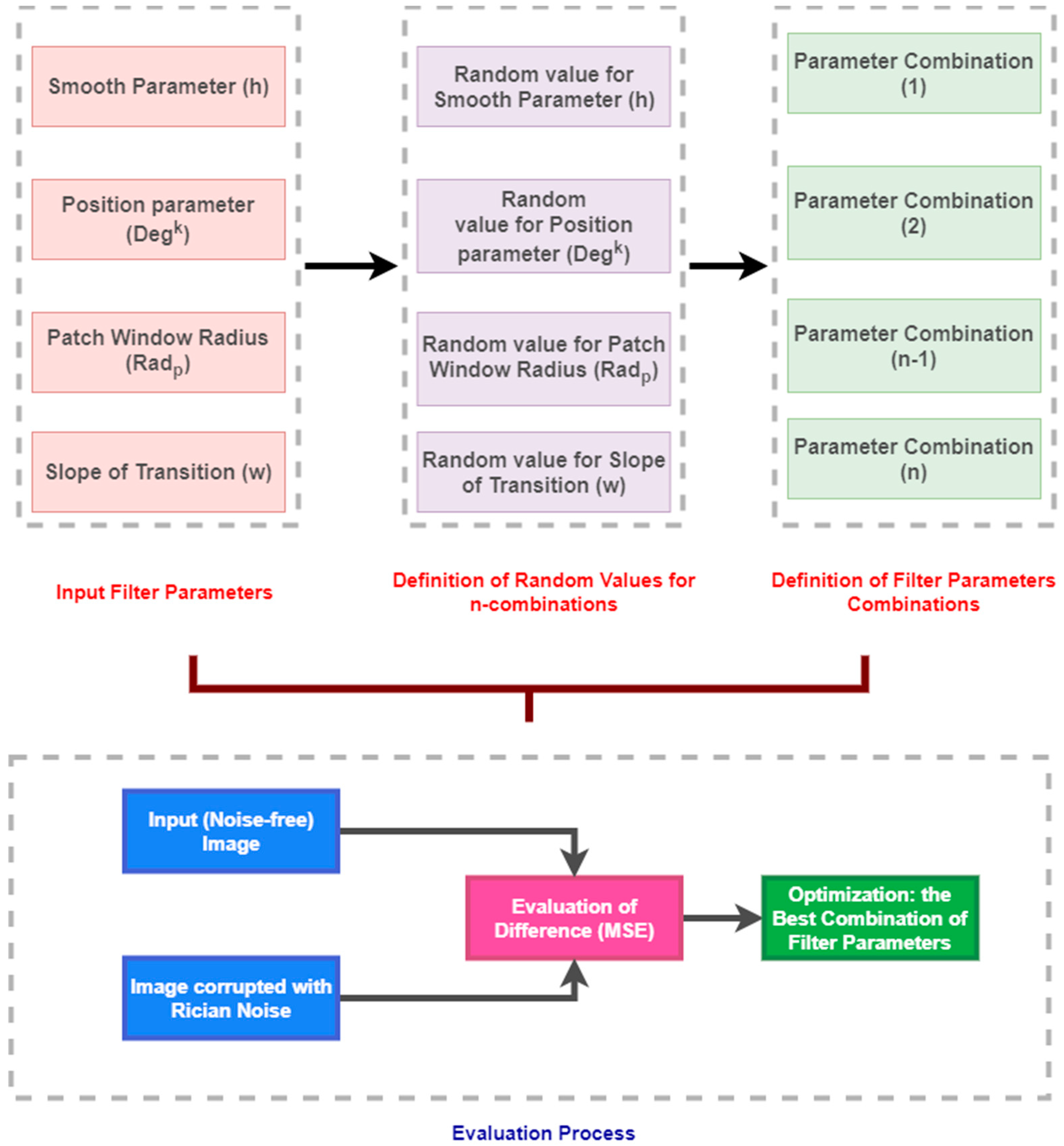
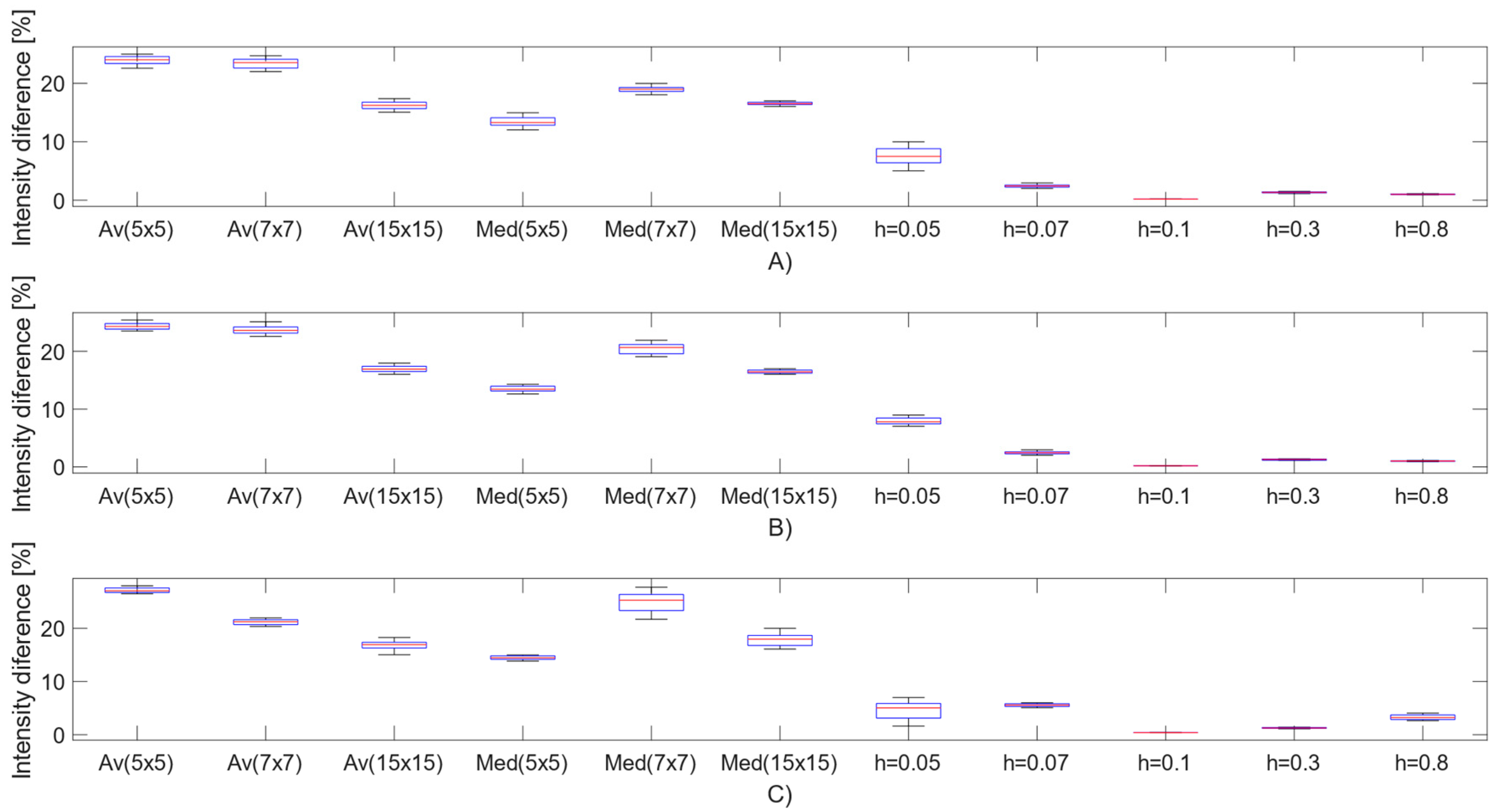
4.3. Set up of the NLM Filter and Parameters Optimization
4.4. Quantification Parameters for NLM Filter Evaluation
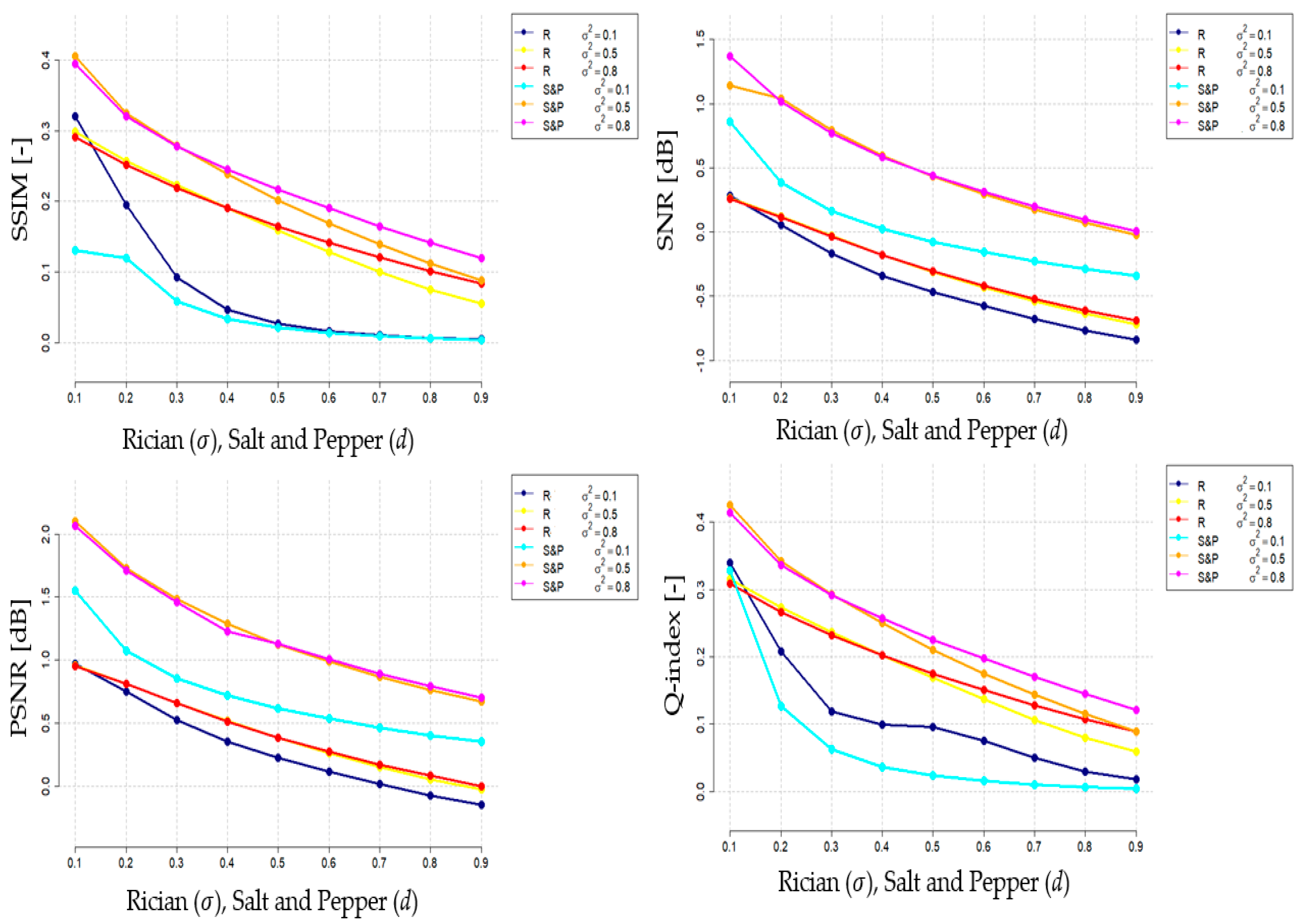
4.5. Filter Performance and Statistical Analysis
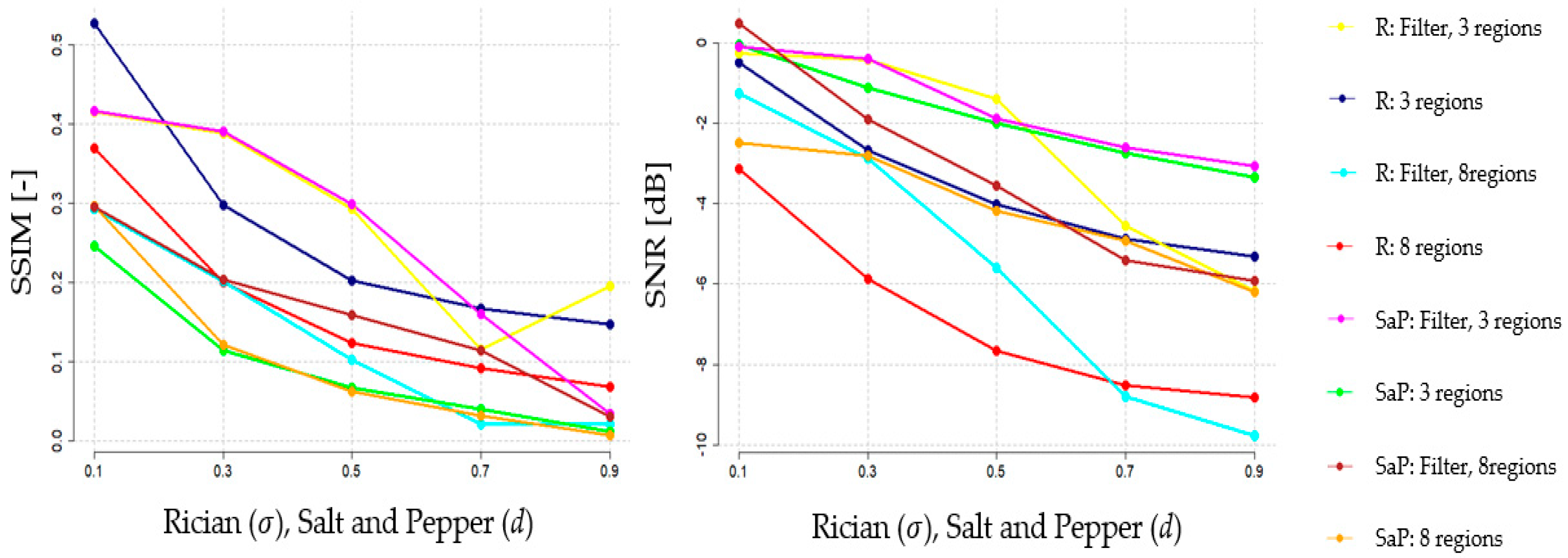
4.6. Impact on Segmentation Performance
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Tang, Y.; He, L.; Lu, W.; Huang, X.; Wei, H.; Xiao, H. A novel approach for fracture skeleton extraction from rock surface images. Int. J. Rock Mech. Min. Sci. 2021, 142, 104732. [Google Scholar] [CrossRef]
- Ramu, S.M.; Rajappa, M.; Krithivasan, K.; Jayakumar, J.; Chatzistergos, P.; Chockalingam, N. A method to improve the computational efficiency of the Chan-Vese model for the segmentation of ultrasound images. Biomed. Signal Process. Control. 2021, 67, 102560. [Google Scholar] [CrossRef]
- Modenese, L.; Renault, J.-B. Automatic generation of personalised skeletal models of the lower limb from three-dimensional bone geometries. J. Biomech. 2021, 116, 110186. [Google Scholar] [CrossRef] [PubMed]
- Syväri, J.; Ruschke, S.; Dieckmeyer, M.; Hauner, H.H.; Junker, D.; Makowski, M.R.; Baum, T.; Karampinos, D.C. Estimating vertebral bone marrow fat unsaturation based on short-TE STEAM MRS. Magn. Reson. Med. 2021, 85, 615–626. [Google Scholar] [CrossRef] [PubMed]
- Jabbar, S.I.; Day, C.R.; Chadwick, E. Automated measurements of morphological parameters of muscles and tendons. Biomed. Phys. Eng. Express 2020, 7, 025002. [Google Scholar] [CrossRef]
- Shin, Y.; Yang, J.; Lee, Y.H.; Kim, S. Artificial intelligence in musculoskeletal ultrasound imaging. Ultrasonography 2021, 40, 30–44. [Google Scholar] [CrossRef] [PubMed]
- Janumala, T.; Ramesh, K.B. Development of an Algorithm for Vertebrae Identification Using Speeded up Robost Features (SURF) Technique in Scoliosis X-Ray Images. In Advances in Intelligent Systems and Computing; Springer Science and Business Media LLC: Berlin, Germany, 2020; pp. 54–62. [Google Scholar]
- Klontzas, M.E.; Papadakis, G.Z.; Marias, K.; Karantanas, A.H. Musculoskeletal trauma imaging in the era of novel molecular methods and artificial intelligence. Injury 2020, 51, 2748–2756. [Google Scholar] [CrossRef]
- Sukhavasi, S.; Sukhavasi, S.; Elleithy, K.; Abuzneid, S.; Elleithy, A. Human Body-Related Disease Diagnosis Systems Using CMOS Image Sensors: A Systematic Review. Sensors 2021, 21, 2098. [Google Scholar] [CrossRef]
- Moran, M.; Faria, M.; Giraldi, G.; Bastos, L.; Conci, A. Do Radiographic Assessments of Periodontal Bone Loss Improve with Deep Learning Methods for Enhanced Image Resolution? Sensors 2021, 21, 2013. [Google Scholar] [CrossRef]
- Bishop, J.H.; Shpaner, M.; Kubicki, A.; Clements, S.; Watts, R.; Naylor, M.R. Structural network differences in chronic musk-uloskeletal pain: Beyond fractional anisotropy. NeuroImage 2018, 182, 441–455. [Google Scholar] [CrossRef]
- Roemer, F.W.; Aydemir, A.; Lohmander, L.S.; Crema, M.D.; Marra, M.D.; Muurahainen, N.; Felson, D.T.; Eckstein, F.; Guermazi, A. Structural effects of sprifermin in knee osteoarthritis: A post-hoc analysis on cartilage and non-cartilaginous tissue alterations in a randomized controlled trial. BMC Musculoskelet. Disord. 2016, 17, 267. [Google Scholar] [CrossRef]
- Bolog, N.; Nanz, D.; Weishaupt, D. Muskuloskeletal MR imaging at 3.0 T: Current status and future perspectives. Eur. Radiol. 2006, 16, 1298–1307. [Google Scholar] [CrossRef]
- Manger, B. New developments in imaging for diagnosis and therapy monitoring in rheumatic diseases. Best Pr. Res. Clin. Rheumatol. 2004, 18, 773–781. [Google Scholar] [CrossRef]
- Dong, M.; Jiao, Z.; Sun, Q.; Tao, X.; Yang, C.; Qiu, W. The magnetic resonance imaging evaluation of condylar new bone remodeling after Yang’s TMJ arthroscopic surgery. Sci. Rep. 2021, 11, 1–7. [Google Scholar] [CrossRef]
- Cao, L.; Wen, J.-X.; Han, S.-M.; Wu, H.-Z.; Peng, Z.-G.; Yu, B.-H.; Zhong, Z.-W.; Sun, T.; Wu, W.-J.; Gao, B.-L. Imaging fea-tures of hemangioma in long tubular bones. BMC Musculoskelet. Disord. 2021, 22, 27. [Google Scholar] [CrossRef] [PubMed]
- Zhang, K.-X.; Chai, W.; Zhao, J.-J.; Deng, J.-H.; Peng, Z.; Chen, J.-Y. Comparison of three treatment methods for simple bone cyst in children. BMC Musculoskelet. Disord. 2021, 22, 1–7. [Google Scholar] [CrossRef]
- Blum, A.G.; Gillet, R.; Athlani, L.; Prestat, A.; Zuily, S.; Wahl, D.; Dautel, G.; Teixeira, P.G. CT angiography and MRI of hand vascular lesions: Technical considerations and spectrum of imaging findings. Insights Imaging 2021, 12, 1–22. [Google Scholar] [CrossRef] [PubMed]
- Wathen, C.A.; Foje, N.; Van Avermaete, T.; Miramontes, B.; Chapaman, S.E.; Sasser, T.A.; Kannan, R.; Gerstler, S.; Leevy, W.M. In Vivo X-Ray Computed Tomographic Imaging of Soft Tissue with Native, Intravenous, or Oral Contrast. Sensors 2013, 13, 6957–6980. [Google Scholar] [CrossRef] [Green Version]
- Sharon, H.; Elamvazuthi, I.; Lu, C.-K.; Parasuraman, S.; Natarajan, E. Development of Rheumatoid Arthritis Classification from Electronic Image Sensor Using Ensemble Method. Sensors 2019, 20, 167. [Google Scholar] [CrossRef] [Green Version]
- Wellard, R.M.; Ravasio, J.-P.; Guesne, S.; Bell, C.; Oloyede, A.; Tevelen, G.; Pope, J.M.; Momot, K.I. Simultaneous Magnetic Resonance Imaging and Consolidation Measurement of Articular Cartilage. Sensors 2014, 14, 7940–7958. [Google Scholar] [CrossRef]
- Romdhane, F.; Villano, D.; Irrera, P.; Consolino, L.; Longo, D.L. Evaluation of a similarity anisotropic diffusion denoising approach for improving in vivo CEST-MRI tumor pH imaging. Magn. Reson. Med. 2021, 85, 3479–3496. [Google Scholar] [CrossRef]
- Kinani, J.M.V.; Silva, A.R.; Mújica-Vargas, D.; Funes, F.G.; Díaz, E.R. Rician Denoising Based on Correlated Local Features LMMSE Approach. J. Med Syst. 2021, 45, 40. [Google Scholar] [CrossRef]
- Joshi, N.; Jain, S.; Agarwal, A. Discrete Total Variation-Based Non-Local Means Filter for Denoising Magnetic Resonance Images. J. Inf. Technol. Res. 2020, 13, 14–31. [Google Scholar] [CrossRef]
- Mehmood, R.; Kaur, A. Modified Difference Squared Image Based Non Local Means Filter. In Proceedings of the 2020 11th International Conference on Computing, Communication and Networking Technologies (ICCCNT), Kharagpur, India, 1–3 July 2020. [Google Scholar] [CrossRef]
- Jeevakala, S.; Brintha Therese, A. Edge preserving de-noising method for efficient segmentation of cochlear nerve by magnet-ic resonance imaging. Int. J. Biomed. Eng. Technol. 2020, 32, 161–176. [Google Scholar] [CrossRef]
- Chandrashekar, L.; Sreedevi, A. Multimodal Image Fusion of Magnetic Resonance and Computed Tomography Brain Images—A New Approach. Biomed. Pharmacol. J. 2020, 13, 1523–1532. [Google Scholar] [CrossRef]
- Sarkar, S.; Tripathi, P.C.; Bag, S. An Improved Non-local Means Denoising Technique for Brain MRI. Adv. Intell. Syst. Comput. 2020, 999, 765–773. [Google Scholar]
- Zhu, M.; Hu, Y.; Yu, J.; He, B.; Liu, J. Find Outliers of Image Edge Consistency by Weighted Local Linear Regression with Equality Constraints. Sensors 2021, 21, 2563. [Google Scholar] [CrossRef] [PubMed]
- Ahmed, A.; Jalal, A.; Kim, K. A novel statistical method for scene classification based on multi-object categorization and lo-gistic regression. Sensors 2020, 20, 3871. [Google Scholar] [CrossRef] [PubMed]
- Liu, N.; Schumacher, T. Improved Denoising of Structural Vibration Data Employing Bilateral Filtering. Sensors 2020, 20, 1423. [Google Scholar] [CrossRef] [Green Version]
- Ioannidis, G.S.; Marias, K.; Galanakis, N.; Perisinakis, K.; Hatzidakis, A.; Tsetis, D.; Karantanas, A.; Maris, T.G. A correlative study between diffusion and perfusion MR imaging parameters on peripheral arterial disease data. Magn. Reson. Imaging 2019, 55, 26–35. [Google Scholar] [CrossRef]
- Mehranian, A.; Belzunce, M.A.; McGinnity, C.J.; Prieto, C.; Hammers, A.; Reader, A.J. Multi-modal weighted quadratic pri-ors for robust intensity independent synergistic PET-MR reconstruction. In Proceedings of the 2017 IEEE Nuclear Science Symposium and Medical Imaging Conference, Atlanta, GA, USA, 21–28 October 2017. [Google Scholar]
- Gracheva, I.; Kopylov, A.; Krasotkina, O. Fast Global Image Denoising Algorithm on the Basis of Nonstationary Gamma-Normal Statistical Model. Commun. Comput. Inf. Sci. 2015, 542, 71–82. [Google Scholar] [CrossRef]
- Xing, L.; Sun, Z.; Fan, Y. Static/dynamic filter with nonlocal regularizer. J. Electron. Imaging 2021, 30, 013013. [Google Scholar] [CrossRef]
- Cai, S.; Kang, Z.; Yang, M.; Xiong, X.; Peng, C.; Xiao, M. Image Denoising via Improved Dictionary Learning with Global Structure and Local Similarity Preservations. Symmetry 2018, 10, 167. [Google Scholar] [CrossRef] [Green Version]
- Rodríguez, C.; López-Fernández, A.; García-Pinto, D. A new approach to radiochromic film dosimetry based on non-local means. Phys. Med. Biol. 2020, 65, 225019. [Google Scholar] [CrossRef]
- Tian, Q.; Zaretskaya, N.; Fan, Q.; Ngamsombat, C.; Bilgic, B.; Polimeni, J.R.; Huang, S.Y. Improved cortical surface recon-struction using sub-millimeter resolution MPRAGE by image denoising. NeuroImage 2021, 233, 117946. [Google Scholar] [CrossRef]
- Arabi, H.; Zaidi, H. Non-local mean denoising using multiple PET reconstructions. Ann. Nucl. Med. 2021, 35, 176–186. [Google Scholar] [CrossRef] [PubMed]
- Heo, Y.-C.; Kim, K.; Lee, Y. Image Denoising Using Non-Local Means (NLM) Approach in Magnetic Resonance (MR) Imaging: A Systematic Review. Appl. Sci. 2020, 10, 7028. [Google Scholar] [CrossRef]
- Kanoun, B.; Ambrosanio, M.; Baselice, F.; Ferraioli, G.; Pascazio, V.; Gomez, L. Anisotropic Weighted KS-NLM Filter for Noise Reduction in MRI. IEEE Access 2020, 8, 184866–184884. [Google Scholar] [CrossRef]
- Chen, G.; Dong, B.; Zhang, Y.; Lin, W.; Shen, D.; Yap, P.-T. Denoising of Diffusion MRI Data via Graph Framelet Matching in x-q Space. IEEE Trans. Med Imaging 2019, 38, 2838–2848. [Google Scholar] [CrossRef] [PubMed]
- Toa, C.-K.; Sim, K.-S.; Lim, Z.-Y.; Lim, C.-P. Magnetic resonance imaging noise filtering using adaptive polynomial-fit non-local means. Eng. Lett. 2019, 27, 527–540. [Google Scholar]
- Yu, H.; Ding, M.; Zhang, X. Laplacian Eigenmaps Network-Based Nonlocal Means Method for MR Image Denoising. Sensors 2019, 19, 2918. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kim, K.; Choi, J.; Lee, Y. Effectiveness of non-local means algorithm with an industrial 3 MeV LINAC high-energy X-ray sys-tem for non-destructive testing. Sensors 2020, 20, 2634. [Google Scholar] [CrossRef] [PubMed]
- Aja-Fernández, S.; Curiale, A.H.; Vegas-Sánchez-Ferrero, G. A local fuzzy thresholding methodology for multiregion image segmentation. Knowl. Based Syst. 2015, 83, 1–12. [Google Scholar] [CrossRef]
- Buades, A.; Coll, B.; Morel, J.-M. A Non-Local Algorithm for Image Denoising. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition, San Diego, CA, USA, 20–25 June 2005; Volume 2, pp. 60–65. [Google Scholar]
- Gayathri, A.; Christy, S. Image de-noising using optimized self similar patch based filter. Int. J. Innov. Technol. Explor. Eng. 2019, 8, 1570–1578. [Google Scholar]
- Bic, C.; Terebes, R. An improved NLM filter with increased noise robustness and adaptive similarity function. In Proceedings of the 2019 IEEE 15th International Conference on Intelligent Computer Communication and Processing (ICCP), Cluj-Napoca, Romania, 5–7 September 2019; pp. 365–370. [Google Scholar] [CrossRef]
- Karnaukhov, V.N.; Mozerov, M.G. Fast Non-Local Mean Filter Algorithm Based on Recursive Calculation of Similarity Weights. J. Commun. Technol. Electron. 2018, 63, 1475–1477. [Google Scholar] [CrossRef]
- Zhang, X.; Hou, G.; Ma, J.; Yang, W.; Lin, B.; Xu, Y.; Chen, W.; Feng, Y. Denoising MR Images Using Non-Local Means Filter with Combined Patch and Pixel Similarity. PLoS ONE 2014, 9, e100240. [Google Scholar] [CrossRef] [Green Version]
- Wiest-Daesslé, N.; Prima, S.; Coupe, P.; Morrissey, S.P.; Barillot, C. Rician Noise Removal by Non-Local Means Filtering for Low Signal-to-Noise Ratio MRI: Applications to DT-MRI. In Transactions on Petri Nets and Other Models of Concurrency XV; Springer Science and Business Media LLC: Berlin, Germany, 2008; Volume 11, pp. 171–179. [Google Scholar]
- Aja-Fernandez, S.; Alberola-Lopez, C.; Westin, C.-F. Noise and Signal Estimation in Magnitude MRI and Rician Distributed Images: A LMMSE Approach. IEEE Trans. Image Process. 2008, 17, 1383–1398. [Google Scholar] [CrossRef] [Green Version]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Fat Saturation (Cartilage) | Proton Density-Weighted Imaging (Cartilage) | Fat-Saturated Proton Density-Weighted Images (Elbow Muscle) | |
|---|---|---|---|
| FOV (mm) | 160 × 160 × 80 | 160 × 160 × 80 | 140 × 140 × 70 |
| Matrix size | 288 × 245 | 288 × 245 | 288 × 245 |
| Acquisition time | 2:55 | 4:22 | 5:54 |
| Slice thickness (mm) | 1.5 | 1.5 | 1.5 |
| Interslice gap (mm) | 0.15 | 0.15 | 0.21 |
| Scan mode | 2D | 2D | 2D |
| Findings | Early cartilage osteoarthritis | Cartilage lesions | Healthy elbow muscle |
| Filter Parameter | n = 100 | n = 1000 | Average Values |
|---|---|---|---|
| H = | 0.8 | 0.8 | 0.8 |
| 6 | 7.31 | 6.65 | |
| 3 | 4 | 3 | |
| 3 | 5 | 4 |
| Variance of Filter Parameter | Rician Noise (FS|PDW|FSPDW) | SaP Noise (FS|PDW|FSPDW) | Speckle Noise (FS|PDW|FSPDW) | ||||||
|---|---|---|---|---|---|---|---|---|---|
| h = | 0.05 | 0.21 | 0.08 | 0.09 | 0.32 | 0.09 | 0.11 | 0.39 | 0.44 |
| 0.21 | 0.73 | 0.45 | 0.38 | 0.42 | 0.88 | 0.42 | 0.42 | 0.65 | |
| 0.004 | 0.005 | 0.003 | 0.005 | 0.009 | 0.002 | 0.12 | 0.22 | 0.19 | |
| 0.48 | 0.51 | 0.49 | 0.53 | 0.68 | 0.77 | 0.87 | 0.92 | 0.91 | |
| Filter Settings | Mod(ID) [%] | ||
|---|---|---|---|
| Av (5 × 5) | 23.78 | 26.51 | 0.42 |
| Av (7 × 7) | 21.27 | 20.32 | 0.52 |
| Av (15 × 15) | 16.35 | 15.41 | 0.46 |
| Med (5 × 5) | 11.34 | 10.11 | 0.48 |
| Med (7 × 7) | 9.45 | 9.0041 | 0.083 |
| Med (15 × 15) | 8.31 | 8.011 | 0.021 |
| h = 0.05 | 3.61 | 2.55 | 0.38 |
| h = 0.07 | 1.21 | 1.0084 | 0.018 |
| h = 0.1 | 0.092 | 0.091 | 1.94 × 106 |
| h = 0.3 | 0.65 | 0.55 | 0.0036 |
| h = 0.8 | 0.45 | 0.45 | 9.46 × 104 |
| Evaluation Parameter | Rician Noise (RNLM-Optim-RNLM) | Salt and Pepper (RNLM-Optim-RNLM) | Speckle Noise (RNLM-Optim-RNLM) | |||
|---|---|---|---|---|---|---|
| Routine Anatomical Imaging|Quantitative Magnetic Resonance Imaging (T2 Maps) | ||||||
| Diff(SSIM) | 12% | 8% | 24% | 20% | 6% | 5% |
| Diff(Corr) | 15% | 10% | 23% | 21% | 8% | 12% |
| Rician Noise (3 Classes|8 Classes) | Salt and Pepper Noise (3 Classes|8 Classes) | |||
|---|---|---|---|---|
| Diff(SSIM(Med 5 × 5)) | 19.24% | 14.61% | 26.12% | 19.55% |
| Diff(SSIM(Med 7 × 7)) | 17.87% | 12.56% | 21.44% | 19.77% |
| Diff(SSIM(Med 7 × 7)) | 9.56% | 6.15% | 14.47% | 12.22% |
| Diff(Cor(Med 7 × 7)) | 18.56% | 17.44% | 19.15% | 18.86% |
| Diff(Cor(Med 7 × 7)) | 14.32% | 14.11% | 16.45% | 15.78% |
| Diff(Cor(Med 7 × 7)) | 10.15% | 9.51% | 11.56% | 11.12% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kubicek, J.; Strycek, M.; Cerny, M.; Penhaker, M.; Prokop, O.; Vilimek, D. Quantitative and Comparative Analysis of Effectivity and Robustness for Enhanced and Optimized Non-Local Mean Filter Combining Pixel and Patch Information on MR Images of Musculoskeletal System. Sensors 2021, 21, 4161. https://doi.org/10.3390/s21124161
Kubicek J, Strycek M, Cerny M, Penhaker M, Prokop O, Vilimek D. Quantitative and Comparative Analysis of Effectivity and Robustness for Enhanced and Optimized Non-Local Mean Filter Combining Pixel and Patch Information on MR Images of Musculoskeletal System. Sensors. 2021; 21(12):4161. https://doi.org/10.3390/s21124161
Chicago/Turabian StyleKubicek, Jan, Michal Strycek, Martin Cerny, Marek Penhaker, Ondrej Prokop, and Dominik Vilimek. 2021. "Quantitative and Comparative Analysis of Effectivity and Robustness for Enhanced and Optimized Non-Local Mean Filter Combining Pixel and Patch Information on MR Images of Musculoskeletal System" Sensors 21, no. 12: 4161. https://doi.org/10.3390/s21124161