Here
is the sensor transfer function, i.e., the Fourier transform of the impulse response, and
is the position vector in reciprocal space. (The difference between spatial frequency and the more commonly used angular spatial frequency (k-vector) is merely a factor
(
).)
and
are the spectral distributions of the input and output, respectively. A sensor transfer function
connects the spectral distribution of the input
to the spectral distribution of the sensor output
as long as the system is linear. It is a Fourier domain description of the sensor action for any input. In addition, it is of interest to know how the power of signal and noise are transmitted through the system. This will allow calculation of the signal-to-noise ratio at the output of the sensor. In the time and space domain the total power is given by the integral of the autocorrelation function
of the sensor input over the entire time period and real space
2.1. Power Spectral Density of Environmental Noise
Environmental noise in molecular sensors is primarily due to temperature gradients, yet also concentration gradients and non-specific binding will play a role [
17,
41]. Nevertheless, we restrict our treatment of environmental noise to temperature gradients and for simplicity neglect convection. The formalism for concentration gradients is exactly the same, since as the temperature equation, the diffusion equation is also a parabolic partial differential equation. For a detailed discussion on intrinsic and extrinsic noise sources, see chapter 7 in [
39]. The temperature equation can be written as
where
is the thermal diffusivity,
is the density,
is the specific heat capacity under constant pressure and
are the heat sources. The solutions (modes) of this equation have the following form:
. By inserting this ansatz into Equation (
8) and solving for the homogeneous solution (
), we obtain the dispersion relation
, with
[
42]. Solving the inhomogeneous equation
yields the PSD of the temperature fluctuations
as a function of the PSD of the heat sources
(see Chapter 13 in [
43] for a similar procedure at the example of the Langevin equation)
To proceed, we need to assume the functional form of the PSD of the heat sources. For simplicity and generality, we assume that the heat source process is wide sense stationary with zero mean and the autocorrelation of the heat sources has a negative exponential form with a characteristic length
and timescale
:
, where
r is the norm of the position vector and
t is time. Under these assumptions the one-sided power spectral density of the heat sources reads
where we have used the results from [
44] for the PSD in three dimensions. By inserting this expression into Equation (
9) we finally arrive at the power spectral density for environmental temperature noise
For our discussion only the functional form of the PSD matters and the exact magnitude of the heat sources is irrelevant. Therefore, we use the following proportional expression for the remainder of this paper
However, we do need a rough estimate of the spatial and temporal correlation lengths/times of the heat sources. These length/timescales are important because the terms in Equation (
12) are constant up to a frequency that is equal to the inverse of the correlation length/time and then start to roll-off with
or
respectively (Lorenzian power spectrum). In practice, one will not notice this sharp transition because there are multiple dominant correlation mechanism including a few with extremely long time and length scales (i.e., seasonal variations) [
18]. For our discussions it is nevertheless sufficient to assume just one dominant correlation mechanism and this one can be motivated heuristically. The heat sources that influence our sensor will neither be kilometers apart nor closer together than a few millimeters. Thus, a reasonable assumption for
for a molecular sensor is in the order of centimeters. The dominant temporal correlation is likely shorter than a day and longer than milliseconds, thus a reasonable assumption for
would be in the hundreds to thousands of second range. Since these correlation lengths are larger than the sensor dimension, the noise is
distributed for all length scales smaller than the sensor. The same holds true for the temporal scales.
Equation (
12) is the combined temporal and spatial power spectrum of the heat sources. To obtain just the spatial power spectral density, one needs to integrate Equation (
12) with respect to
f over the entire frequency spectrum to obtain
Due to the assumption of wide sense stationarity and
being time and space independent we were able to carry out the integration. Equation (
13) has two terms corresponding to the two correlation mechanisms of the heat sources (one spatial and one temporal): The first term with
is the spatial correlation due to the inhomogeneous spatial distribution of the heat sources. Its presence in the PSD was expected. The second term with
is a spatial correlation mechanism caused by the temporal correlation of the heat sources (on-off switching) [
30]. Thus, a temporal correlation mechanism will show up in the spatial frequency spectrum because the two domains are linked via the diffusion equation.
The
dependence in Equation (
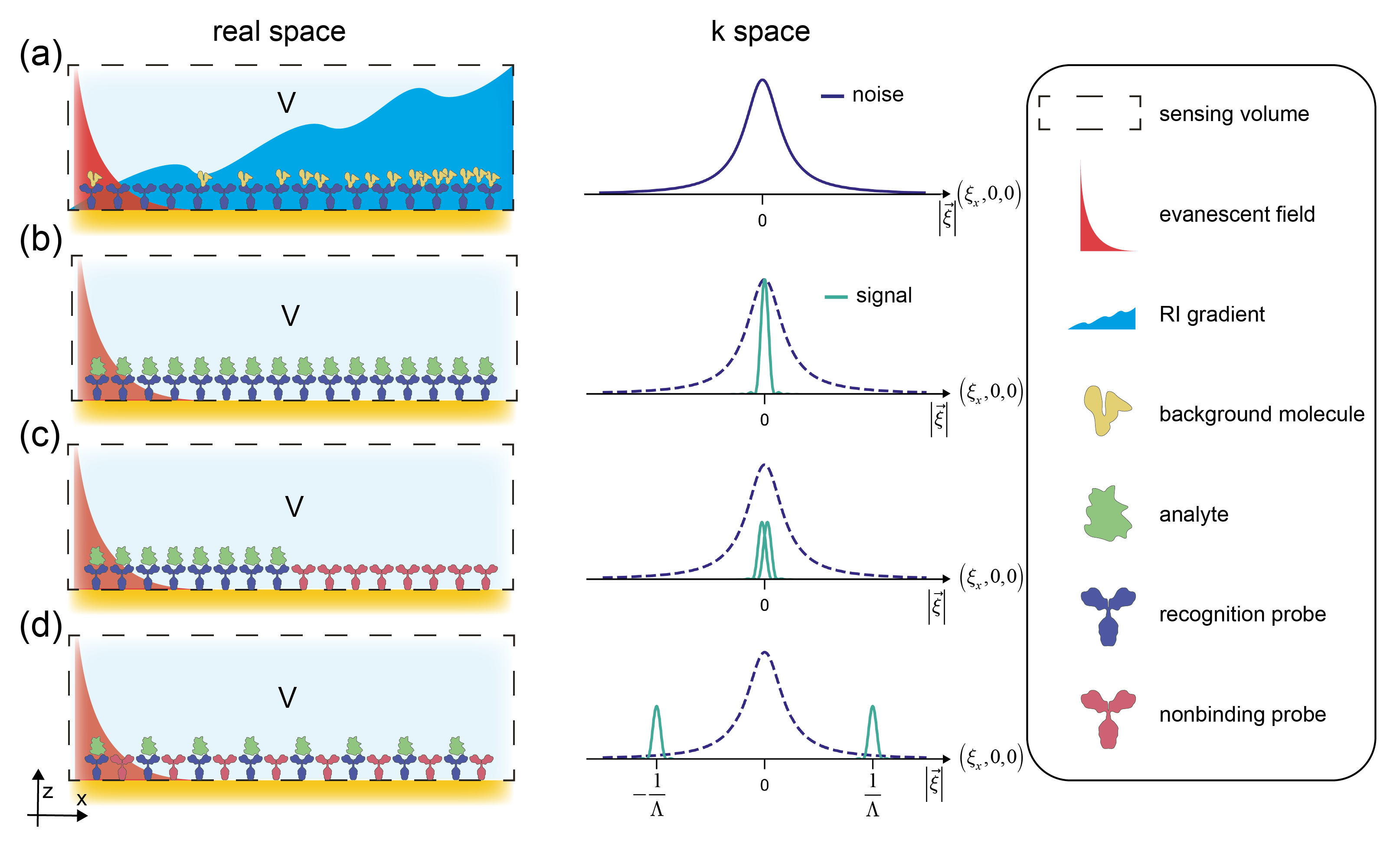
13) shows us that the environmental temperature noise is mainly situated at low spatial frequencies. Therefore, it is beneficial to construct molecular sensors that have most of their signal at high spatial frequencies, i.e., through spatial modulation of the binding signal.
2.2. Signal Power Spectral Density of Integrative and Locked-in Sensors
We will now derive the PSD of the signal of the input of integrative and locked-in sensors. Since the signal is deterministic, the PSD is the square of the Fourier transform magnitude of the signal input
The signal of a molecular sensor can be described by the multiplication of an envelope/shape function
and a modulation function
The shape function constrains the sensors extent in time and space. It is, therefore, dependent on the measurement time and the size of the sensor (zero outside of it). The modulation is a periodic function of infinite extent that modulates the signal within the sensor volume/experiment duration at a preferentially high spatial and/or temporal frequency. The signal of a molecular sensor based on a label-free optical measurement is a spatial and temporal change of the refractive index induced by the binding of molecules to the immobilized recognition sites. The shape and modulation function therefore describe the distribution of the refractive index due to the analyte in space and time during an experiment.
The signal’s power spectrum is obtained by computing the squared Fourier magnitude of the product of envelope and modulation functions
which can also be conveniently written as the convolution of the Fourier transforms of envelope
S and modulation function
FAs mentioned in the introduction, refractometric biosensors are integrative sensor. This means that they simply integrate the refractive index change within the entire sensor volume without any possibility for referencing within the sensing volume. Examples of integrative sensors represent nearly all unreferenced or macroscopically referenced (signal and reference sensors are further apart than the sensor dimensions, maybe even in different flow channels) refractometric sensors such as surface plasmon resonance (SPR) or waveguide-based biosensors. In integrative sensors, the modulation function is unity, and the signals PSD is then equal to the square magnitude of the Fourier transform of the envelope function only
In a locked-in sensor the signal is modulated with a spatial modulation period
and/or temporal period
. Yet, only spatial modulation is important for environmental temperature and non-specific binding noise rejection. For algebraic simplicity, we assume a sinusoidal spatial modulation along the vector
of the form
, with Fourier transform
, where
is the Dirac delta function. If one performs the convolution in Equation (
17) it is obvious that the action of the modulation is merely a splitting and a shift of the original signal input to the spatial frequencies
while its envelope and bandwidth remains unchanged. Mathematically, the PSD of the signal reads
The smaller the modulation period the further the signal power is shifted away from zero frequency. Since the environmental noise decreases with increasing spatial frequency the signal-to-noise ratio is higher at high spatial frequencies, i.e., for small modulation periods. More figuratively speaking, interdigitated signal and reference regions should be together as closely and as numerous as possible within a given sensor.
2.3. Ingredients and Analogies of Temporal and Spatial Lock-In Amplifiers
We have seen in the last two sections that modulation shifts the PSD of the signal to the modulation frequency while preserving its bandwidth. Environmental noise is generally lower at these higher frequencies (
Figure 1). However, this alone does not yet give a better signal-to-noise ratio of the molecular sensor. One effectively needs to construct a sensor transfer function such that it overlaps precisely with the signal bandwidth. In general, a lock-in can therefore be broken down into two essential operations. First, modulation shifts the signal power away from zero frequency to a frequency where noise is lower. In a second step, a bandpass filter that ideally matches the signal bandwidth is applied. The remaining Fourier components are then integrated both in the frequency domain and the space domain. The exact way how the bandpass filtering is accomplished depends on the implementation of the lock-in amplifier. There is, however, one essential difference between a lock-in and a traditional bandpass filter. In its essence, a lock-in is a tracking bandpass filter. It uses a reference wave to track the frequency (and depending on the implementation also the phase) of a signal of interest.
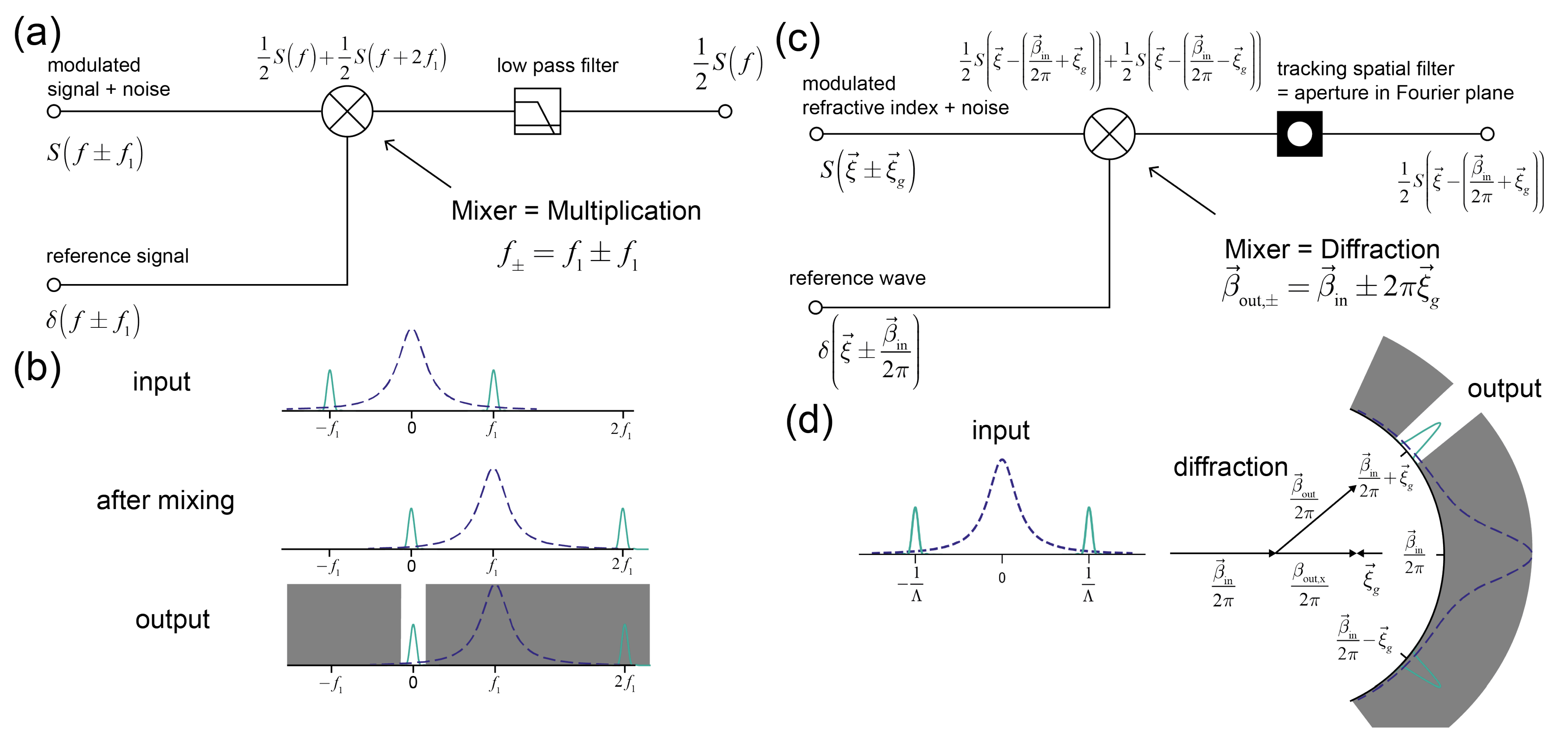
In the time domain this is achieved in an elegant way. By mixing (multiplying) signal and reference wave, the two signal sidelobes as well as the noise are shifted and one of the signal lobes is locked precisely to DC (
Figure 2a,b) (The reference and the signal are usually taken from the same source and therefore have no mutual drift). On the other hand, due to the mixing, the noise has been shifted to the mixing frequency (
Figure 2b). The second step is to use a filter to match the sensor transfer function to the signal bandwidths. Because half of the signal is located at DC, one can employ a very narrow bandwidth low-pass filter. The bandwidth is narrower than any bandpass filter that can be implemented by active RC (or LC) circuitry, where frequency stability problems limit the bandwidth [
45]. In the time domain, the main motivation of the mixing with low-pass filtering over simple bandpass filtering is that one can construct a sensor transfer function that matches more precisely the signal bandwidths (at the cost of discarding half of the signal power).
In the spatial domain the basic ingredient for the most common implementation of a lock-in (analog lock-in) is the diffraction of a reference wave at ordered matter. Therefore, any kind of propagating wave phenomenon can be used for the implementation of a lock-in, e.g., electromagnetic or acoustic waves. A wave has a certain momentum
that, if it is mixed with the grating/crystal momentum of ordered matter, can achieve a lock-in in reciprocal space (
Figure 2c). Conservation of momentum manifests in the diffraction condition and leads to two diffracted waves that have a well-defined propagation direction relative to the one of the reference wave for every possible grating momentum vector
(
Figure 2d). The selection of one of the two diffracted waves with propagation vector
is mediated by a spatial filter at a Fourier plane (in the far field) that acts as a bandpass filter. The noise is also filtered out because its lower spatial frequencies primarily diffract in the forward direction (
Figure 2d) [
11]. In contrast to the temporal lock-in, the spatial lock-in cannot be locked to DC, because it is a vector lock-in and only the direction but not the magnitude of the reference wave momentum is changed. The direction is fixed by the diffraction condition. However, it is difficult to hit a fixed pinhole in space, especially since thermal and mechanical effects might change the diffraction condition slightly. Therefore, the spatial filter needs to track the diffracted signal. Although the pinhole could be moved in the Fourier plane, it is much easier to use an array detector and to track the signal by image registration. The spatial filter can then be applied digitally [
11]. The tracking/registration operation therefore has the same effect as the DC lock of the signal in the time domain. More fundamentally, the lock-in in time is a one-dimensional energy lock-in whereas in space it is a three-dimensional momentum lock-in. This has some implications on the performance of spatial lock-ins of different dimensionality.
2.4. Performance of Spatial Lock-Ins of Different Dimensionality
To continue our discussion on the performance of spatial lock-ins of different dimensionality it is helpful to consider a concrete transfer function. For simplicity, we assume that the filter function perfectly overlaps with one of the lobes of the PSD of the signal and its squared Fourier magnitude has the same functional form. The bandwidth will therefore be determined by the envelope function of the sensor only. The envelope function is unity inside the sensor volume and the time span of interest:
We assume a rectangular truncated sensor with spatial dimensions
and the sensor output being suddenly switched on and being switched off again after a time period
Here we have used the definition of the rect function as described in
Appendix A. We have chosen the time axis such that the middle of the experiment corresponds to
. The transfer function of such an integrative sensor is therefore a product of four sinc functions centered at the origin along every coordinate
(In the case that the sensor was circular,
would need to be replaced by
, where
is the Bessel function of the first kind order 1,
D the diameter and
.) The transfer function of a spatially locked-in sensor locked to the spatial frequency
is simply the shifted version of Equation (
22)
It is important to stress again that the transfer function is merely shifted by the lock-in and its bandwidth remains unaffected. Indirectly, the noise rejection depends on the ratio of the referencing length scale to the sensor dimension. Sub-micron referencing allows for roughly 1000 oscillations of the sine before its truncation. Therefore, its satellite peaks are well separated in k-space (
Figure 1d) and resemble delta-distributions. Yet, if the sine is truncated after one oscillation only (a classical macroscopically referenced sensor) the sinc functions are very broad compared to their separation distance and even overlap (
Figure 1c). Substantially more noise is picked up. In the time domain, this property is usually quantified as the quality factor
Q as it measures the shift in frequency space relative to the FWHM around the center frequency and reflects the noise rejection capabilities of the system. One should also notice that the argument of the sinc function depends on the sensor/experiment extent along the corresponding direction and hence the full width half maximum (FWHM) of the power transfer function
along one dimension is
with
. Therefore, the concentration of the signal in reciprocal space and hence the noise rejection capabilities increase with experiment duration and the volume of the sensor. However, we cannot really influence the temporal extent/frequency content of Equation (
22), since this is determined by the temporal characteristics of the molecular interaction to be investigated. (If kinetics are not important and we just perform an endpoint measurement
is essentially how long we can average.) For the following discussion, we only consider the spatial dependency of Equations (
22) and (
23).
The performance of the spatial lock-in depends on five design variables, the spatial dimensions
,
,
as well as the norm and direction of
. The norm and direction of
in the sensor volume are important for the suppression of environmental noise (a shift does not change the bandwidth).
,
,
affect the volume in reciprocal space (i.e., the bandwidth) and therefore influence the contributions of both environmental and white noise sources on the output (
). The lock-in is always in three dimensions but the envelope might exhibit unequal lengths
. In general, the envelope function of a sensor could resemble a 1D (e.g., fiber-based or strip waveguide-based [
46]), 2D (e.g., classical surface-based biosensors [
47]) or 3D function (e.g., photonic crystal sensors [
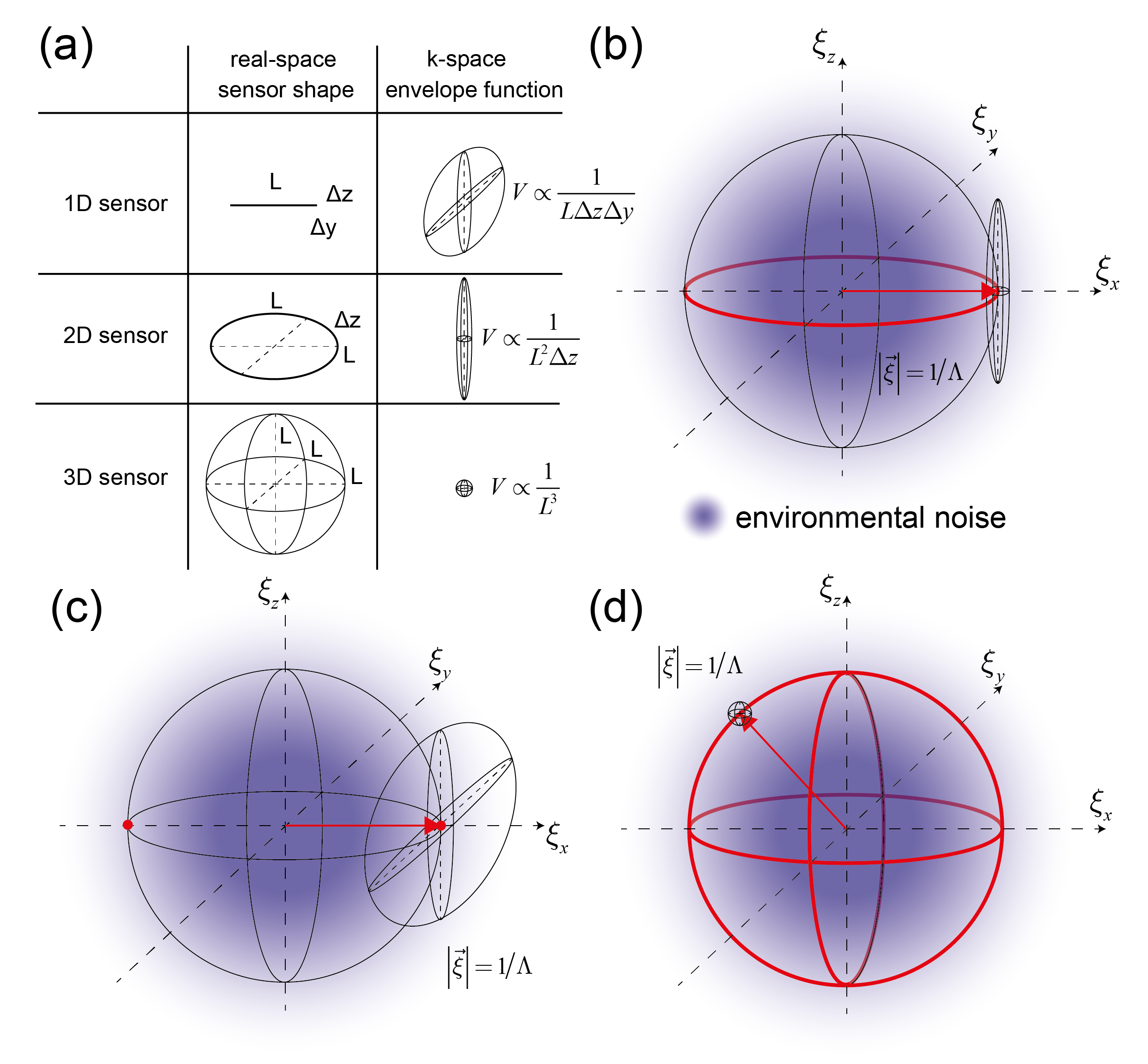
48]). The shape of the envelope function in reciprocal space also depends on its dimensionality in real space (
Figure 3a). Ultimately, the signal-to-noise ratio improves inversely with the sensor volume in real space. In other words, a higher signal-to-noise ratio comes at the expense of spatial resolution of the binding event. The dependence on the sensor volume also implies that a one-dimensional sensor needs to be much longer than the edge length of a 3D sensor to have the same performance
. To give some numbers, for typical penetration depths of optical evanescent waves (
,
= 100 nm) and an edge length of 10 m of the 3D sensor, the one-dimensional sensor needs to be 10 cm long. This assumes that the entire evanescent field volume of the 1D sensor contains binding sites, which implies that it is of crucial importance that in 1D and 2D sensors most of the evanescent field volume is patterned with binding sites. Most biosensors are surface-based and hence two-dimensional (
). As long as the grating vector is in the
plane, all locked-in sensors have the same signal-to-noise ratio (
Figure 3b). This is because the sensor transfer function is symmetrical in
. However, if the grating vector points along the z-direction (orthogonal to the sensor surface) the environmental noise rejection is severely compromised. The sensor transfer function is elongated along
to such an extent that it now largely overlaps with the environmental noise. More figuratively, if the grating vector is along z in a 2D sensor, it is essentially not referenced anymore. For a 1D sensor this is even more restricted with only 2 points in reciprocal space that display the same signal-to-noise ratio (
Figure 3c) because the sensor transfer function is elongated in two reciprocal spatial directions. On the other hand, in 3D the sensor transfer function is perfectly symmetric and every point on a sphere with radius
has the same signal-to-noise ratio (
Figure 3d). Since there are many possible independent reciprocal volumes on the surface of this sphere, 3D sensors can easily be multiplexed. In real space, this would correspond to multiple overlayed affinity gratings with different grating vectors each giving rise to its own distinct Bragg reflection. In a way this represents an artificial crystal that can detect binding, i.e., a coherent molecular system. However, this shall not signify that 3D sensors are superior to 2D or 1D sensors, since other factors such as ease of readout or accessibility of binding sites by diffusion also influence the choice of sensor design. For instance, a 3D sensor would need to be rotated relative to the incident beam to read out all the different Bragg reflections.
To summarize, the following rules of thumb to maximize the separation of signal and noise can be stated: First, use the highest lock-in frequency possible for most efficient environmental noise rejection. The ultimate limit is a lock-in period that is twice as long as the largest molecule size because the signal and reference regions cannot be smaller than the molecule, otherwise already one molecule would lead to crosstalk (signal contribution to both signal and reference region at the same time). Since most solvated biological macromolecules have dimensions of 5–10 nm, this limit will be around 10–20 nm. Second, the grating vector should ideally point along the longest spatial direction of the sensor. Third, the sensing volume should be as large as possible to maximally constrain the signal in reciprocal space.
2.5. Implementations and Readout Modes of Spatial Lock-In Amplifiers
As for time-domain lock-ins, there are also many possible implementations of spatial lock-ins. Nevertheless, important distinctions for the signal-to-noise ratio is the nature of the wave that is modulated by the ordered matter and whether the lock-in is analog or digital. Furthermore, it is also relevant whether the lock-in is just in spatial frequency or in frequency and phase.
Provided that the sensor can be patterned with a sufficiently high spatial frequency, ultimately, the spatial lock-in frequency is limited by the wavelength of the wave that is used to probe the ordered matter. The short wavelength and gentle interaction with molecular matter make electromagnetic waves at optical frequencies especially suited to build high spatial frequency lock-ins with reasonable diffraction angles. Even higher lock-in frequencies could be achieved with electromagnetic waves in the UV and X-ray range or electron beams, but these waves are too energetic and therefore damaging to macromolecules. Besides optics, acoustics is also widely applied in label-free biosensing (quartz crystal microbalance (QCM), surface acoustic wave devices) [
49,
50]. However, acoustic waves have roughly 3 orders of magnitude longer wavelength than electromagnetic waves at optical frequencies. In addition, they exhibit high damping in water [
51]. In conclusion, electromagnetic waves at optical frequencies are the wave phenomena of choice to build spatial lock-ins for molecular sensing.
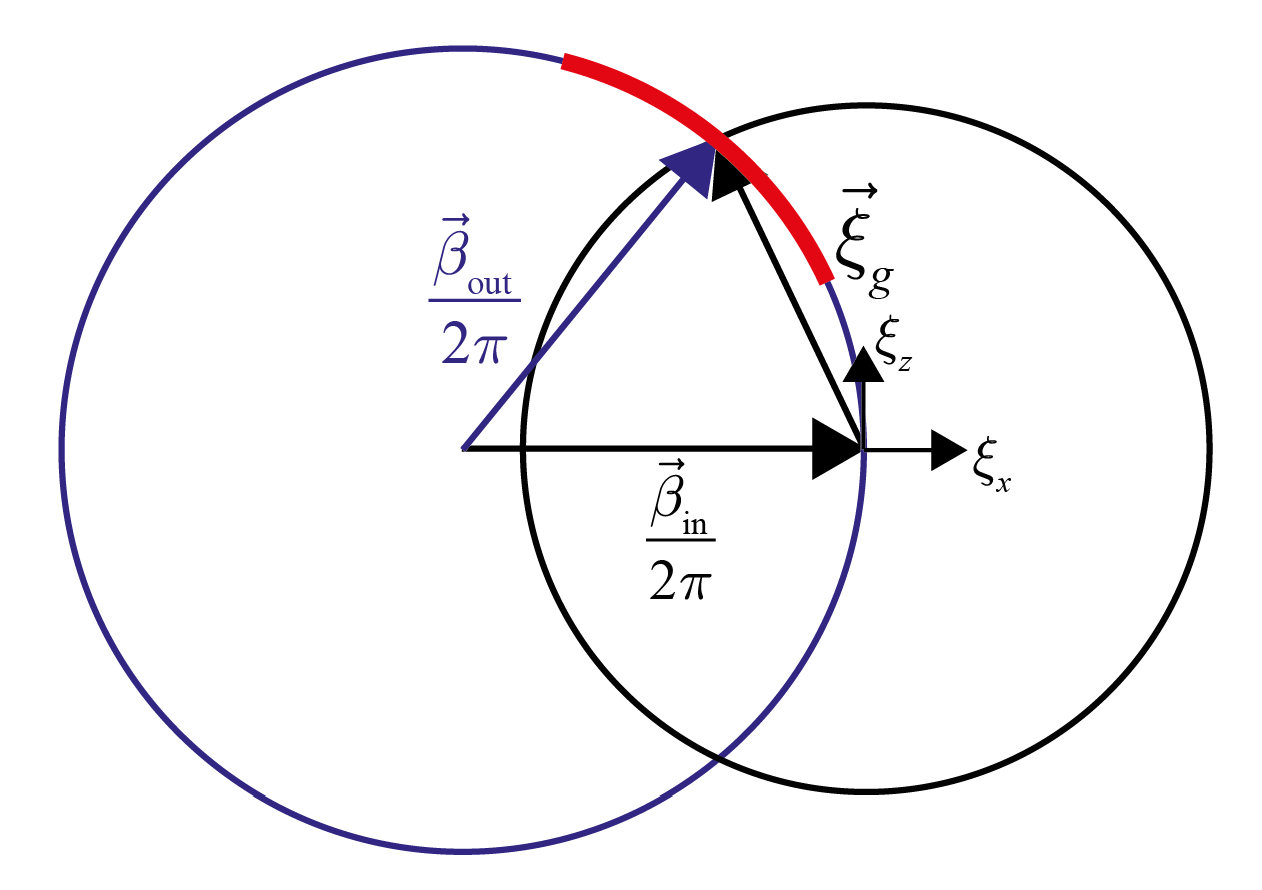
We now briefly discuss analog and digital lock-in amplifier implementations and then provide a summary of their advantages and disadvantages. Analog lock-in amplifiers use the coherence of a reference wave and the Fourier transformation properties of free space propagation or lenses to acquire an image of a Fourier plane. (Fourier planes are always curved in reciprocal space and constitute a subset of the surface of a sphere with radius
. The origin is such that it overlaps with the start of the incident beam momentum vector whereas the end of the incident beam momentum vector is located at the origin of k-space (
Appendix B and
Figure A1). Every point in the Fourier plane contains information about all the binding sites in the sensor volume [
52]. Thus, by observing it, the entire sensor volume is monitored at this specific spatial frequency [
11,
36,
53]. (One could also think of an analog lock-in that does not use coherence for the reference subtraction but somehow manages to readout all interdigitated signal and reference regions collectively in one measurement each. The measurement noise of such an implementation would still be higher because two measurement instead of one need to be performed. (The measurement noise would be uncorrelated, and its variance would be
.) A convenient way to create a Fourier plane without any additional optical components is to order the molecules in the shape of a focusing hologram (diffractive lens) [
11,
36]. The relevant Fourier component is then spread over an Airy disk of diameter
, where NA is the numerical aperture (
,
D is the diameter of the lens/sensor,
n the refractive index and
F the focal distance) of the focusing diffractive sensor and
the wavelength. The further away the Fourier plane from the sensor the lower are the resolution requirements of the acquired image to isolate the relevant Fourier component.
A digital or also non-coherent spatial lock-in is essentially the acquisition of a high-resolution image of the entire sensor volume. From this image one then performs a digital Fourier transform and applies a digital bandpass filter (as in the time domain [
18]). In biosensors, the digital lock-in approach has been demonstrated with sensors based on labeled molecules (e.g., the signal is mediated by a fluorophore) and the authors have reported significantly improved detection limits with the digital lock-in compared to integrative sensors [
54]. In addition, any surface plasmon resonance imaging sensor using distributed referencing is essentially a digitally locked-in sensor [
15]. Other options for a digital spatial lock-in could include arrays of LSPR (localized surface plasmon resonance) sensors [
55] or arrays of slot waveguides [
56]. These would need to be functionalized in an alternating manner and being separated at sufficient mutual distance to avoid coupling (crosstalk) between the sensing elements. For 2D sensors, one could also think of acquiring a high spatial frequency image with scanning probe techniques. However, due to their operation principles they are not really suited for the monitoring of ensemble properties of molecular interactions.
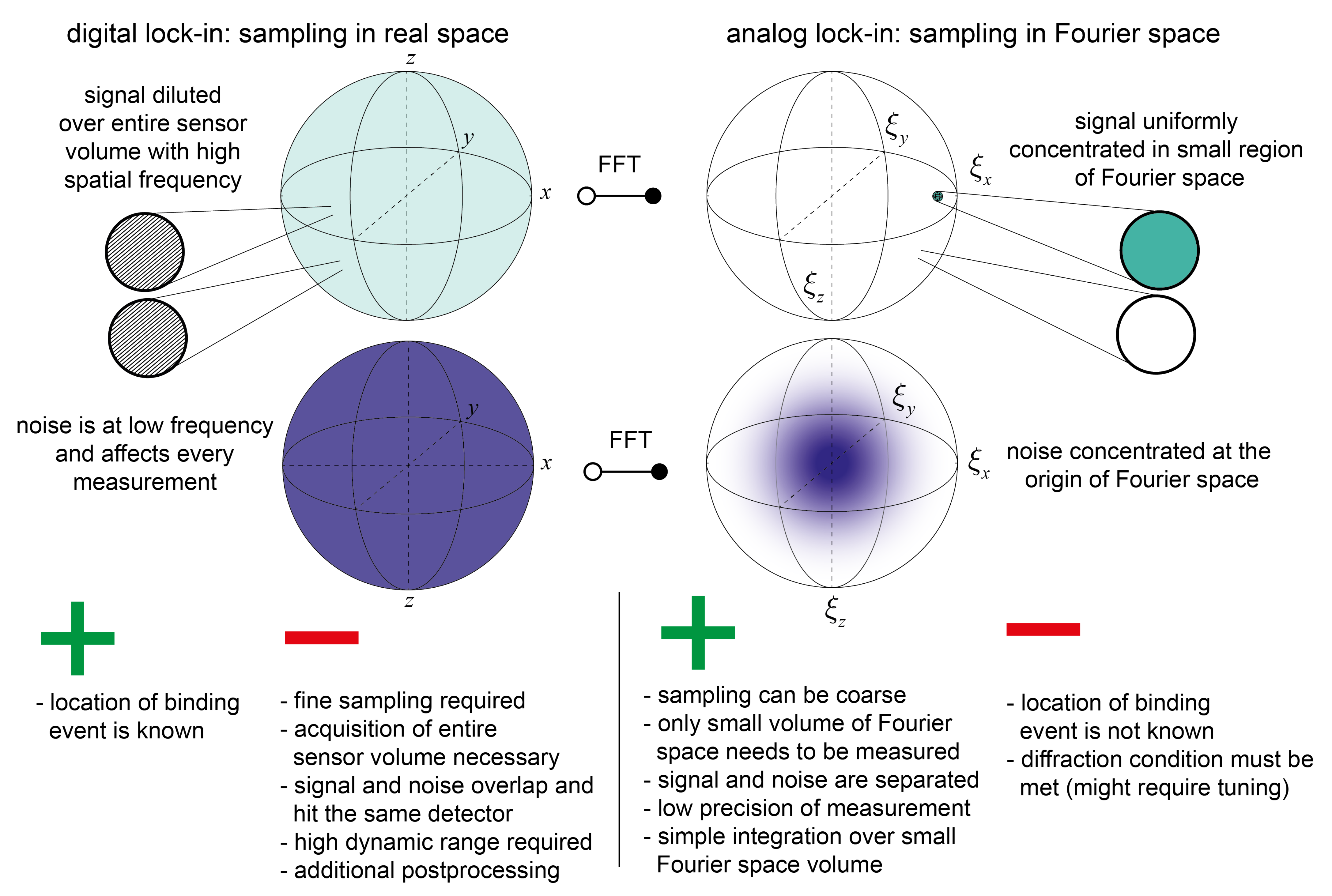
In summary, analog and digital lock-ins differ in that an analog lock-in samples the Fourier space representation of the sensor whereas the digital lock-in samples the sensor in real space and performs the Fourier transformation digitally (
Figure 4). In real space the signal as well as the noise are distributed over the entire volume of the sensor. In Fourier space, the signal is not only concentrated to a small region but in addition noise and signal are separated. Due to these significant differences, analog lock-in amplifiers (diffractometric biosensors) have numerous advantages over digital lock-in amplifiers (refractometric biosensors using distributed referencing):
First, a digital lock-in needs to sample the entire sensing volume with a high spatial frequency such that the Nyquist criterion for the signal is met. Only then there is no aliasing, and the entire signal power is collected. On the other hand, the analog lock-in simply needs to integrate a small volume in Fourier space, because the entire signal power is localized there. The rest of Fourier space does not need to be acquired. As mentioned above, by adjusting the focal distance, the resolution requirements for detecting the relevant Fourier component can be rendered arbitrarily low. Thus, analog lock-ins can construct a sensor transfer function at high spatial frequency without the need for sampling the spatial domain with high resolution.
To put this into perspective, let us consider a 2D sensor of dimensions 1 mm × 1 mm with a lock-in period of 200 nm. To resolve the spatial modulation in real space a resolution of at least 100 nm is required (due to measurement noise it is even a bit smaller). To image the entire sensor 10,000 × 10,000 data points need to be acquired in a digital lock-in vs. 1 data point in the analog lock-in. This fact has multiple implications. First, imaging at optical frequencies at 200 nm resolution is challenging even with the best microscopes. Therefore, the spatial frequency of the digital lock-in will be at least one order of magnitude lower than in the coherent (analog) readout. In addition, current label-free optical biosensor face other constraints than the diffraction limit. Even with commercial instruments, the splitting factor in SPR cannot be increased below a few tens of microns due to constraints of the physical transduction principle, namely diffraction blurring by imaging the surface and the surface plasmon propagation length [
15,
57,
58]. In other words, the free space propagator that enables the Fourier transformation in the analog lock-in works against the performance of the digital lock-in. The second implication is acquisition speed. With the current standard scientific sensor format of 1–10 megapixel, one ultimately requires stitching and refocusing to scan large sensor areas and therefore the acquisition will be considerable slower. The third drawback is dynamic range (digital versions of temporal lock-ins have the same issue (Section 6.3 in [
18])). This drawback arises because the noise is measured as well. To give an example, consider a 12-bit camera: To acquire the signal in real space and a noise 1000 times higher than the signal we will lose 10 bits to the noise and can only measure the signal with the remaining two bits. This only gives an extremely coarse measurement output. On the other hand, in analog lock-ins the noise is spatially separated from the detector and is not acquired. Almost all the bits available can be used to digitize the signal. Fourth, there will be a measurement error for every data point. Therefore, a digital lock-in will have much higher measurement noise if the same detector is used as in the analog case. In addition, there is a fundamental difference in measurement error tolerance between refractometric and diffractometric biosensors as shown in part II [
38]. Fifth, the readout system of an analog lock-in is considerable simpler. No high-resolution optical setups are required. In the simplest case one only needs a stable laser, an aperture and an integrative detector.
It is obvious that all these advantages must come at a cost. Yet, as it turns out the cost is actually information that is not required in label-free biosensors. Specifically, the exact location of one single binding event. Label-free interaction studies usually aim at determining ensemble properties of the interaction between two ensembles of biomolecules (affinity, concentration etc.) [
59]. Thus, they rely on the determination of an average receptor occupancy (what fraction of receptors has bound a target) on the sensor surface. Usually, receptor occupancy is low in diagnostic applications because the concentration is 2–3 orders of magnitude lower than the affinity (dissociation constant
) of the molecular interaction [
36,
59]. Therefore, biosensors must collectively monitor the average occupation of millions of receptors at the same time without requiring knowledge of the exact state of an individual receptor. Another small disadvantage is that depending on the arrangement, the analog lock-in might require tuning to fulfill the diffraction condition. Yet, whenever the diffracted signal is a free space mode and the sensor is 2D, a simple array detector with digital tracking will be sufficient. The diffraction condition is automatically met at a slightly different angle that still hits the detector. In conclusion, analog lock-in amplifiers are more promising than digital ones when it comes to ease of instrumentation and environmental and measurement noise susceptibility.
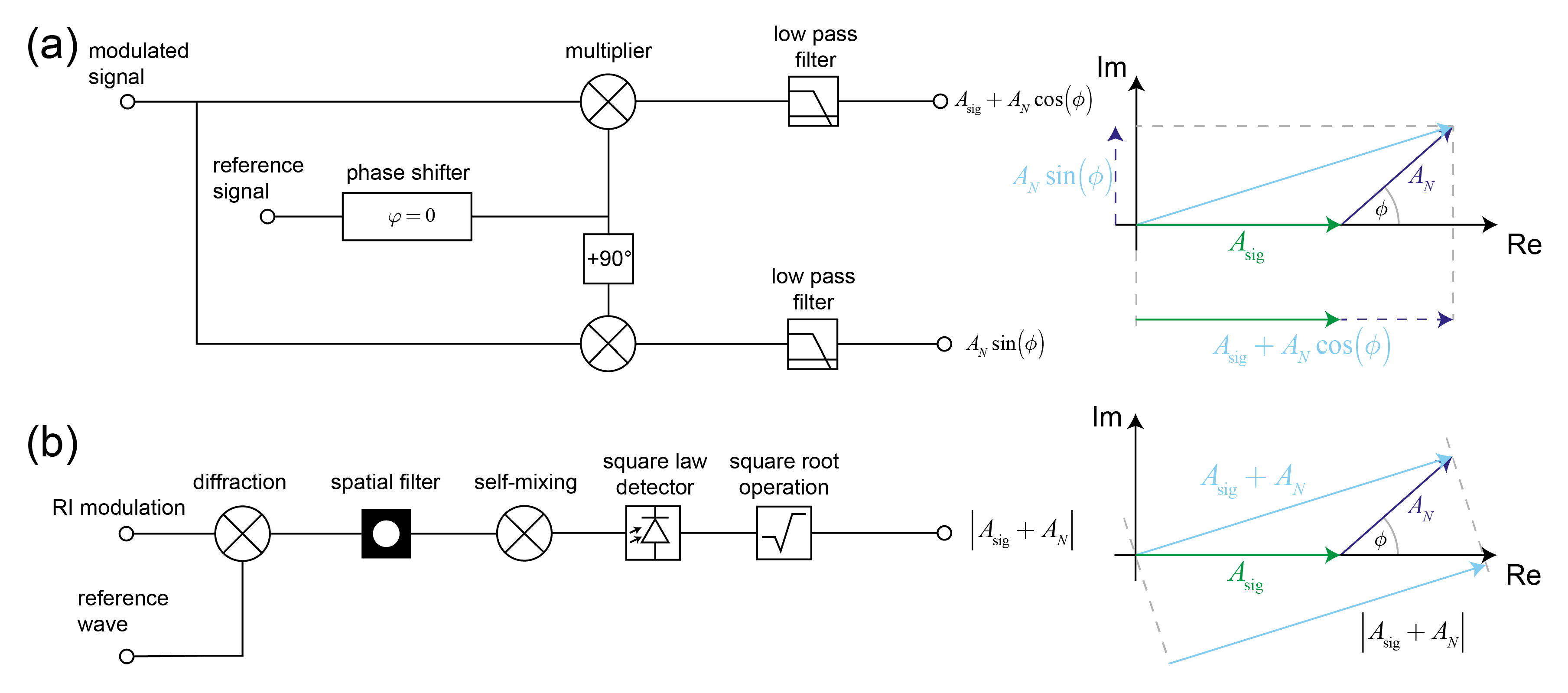
Lastly, we want to investigate the difference between frequency and phase lock-ins. This is important because spatial lock-in amplifiers based on optical diffraction are only frequency lock-ins. A narrow sensor transfer function assures that only the carrier frequency and the frequency components in its vicinity are transduced. For simplicity, we now assume that we have a perfect frequency lock and that only the carrier frequency is transduced. Furthermore, we write the Fourier component of the carrier frequency of the sensor output after filtering in phasor notation. The resultant phasor
still has two components: a signal phasor
and a remaining noise phasor
that have an arbitrary phase relationship
to each other.
This is best visualized in the complex plane (
Figure 5). Without loss of generality, we have assumed the signal phasor to be aligned with the real axis. The difference between a frequency and phase lock-in is that a frequency lock-in only measures the magnitude of the resultant whereas the phase lock-in measures both magnitude and phase. To achieve a phase measurement, an external reference signal is required. The reference signal must be in a well-defined phase relationship with the signal and not pass through the system. The action of mixing is essentially a projection of the resultant phasor along the reference signal direction. By shifting the reference signal by 90
both the in-phase and quadrature components of the resultant can be measured. In general, the signal-to-noise ratio will depend on how the measurement is performed and the noise properties. Under the assumption that the noise is time dependent and that the signal-to-noise ratio is the ratio between the signal power
divided by the mean noise power
, a phase sensitive lock-in amplifier has the following signal-to-noise ratio:
. This scheme is not easily accomplished in the spatial domain. In a spatial lock-in amplifier the spatial filter restricts the number of phasors that can pass through the detector. However, at optical frequencies only detectors that measure the light intensity, which is proportional to the squared amplitude, are readily available. The resultant phasor is therefore self-mixed and only its squared magnitude can be measured. The magnitude of the phasor is:
From the second term it is obvious that interference between signal and noise is present. Thus, signal and noise are no longer statistically independent, and one cannot define a proper signal-to-noise ratio for the frequency lock-in. As an approximation one can take the ratio between original signal and noise power without the interference term
. Thus, the performance of a phase lock-in is not much better than a frequency lock-in if the phase angle is arbitrary and the noise is time dependent. However, the phase lock-in has significant advantages when the noise phasor is mostly static and can be measured before the signal is applied. This is the case for the speckle background of diffractometric biosensors in real time measurements [
11]. A detailed noise analysis would involve concepts from speckle physics; however, this is beyond the scope of this paper. Yet briefly, the speckle background due to surface roughness is the noise phasor. Since it arises from a random phasor sum its length is Rayleigh distributed and its phase is uniform over
[
38,
52]. If the phase information is unknown, the resultant phasor (signal + noise) has a length that is Rician distributed. The statistics of the Rician distribution determines the uncertainty of the pure frequency lock-in. In the phase lock-in, the noise phasor length and phase uncertainty will only be limited by the precision of the readout instrumentation and the stability of the illumination. In part II, we discuss this point more in depth [
38].


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}





