UWB Localization with Battery-Powered Wireless Backbone for Drone-Based Inventory Management

 , , , and
, , , and
Abstract
:1. Introduction
- Always-on UWB radios consume significantly more energy than traditional radios, thereby limiting the possibility of battery or energy-harvesting-powered anchor nodes.
- Design of a scalable localization system that requires minimal pre-existing infrastructure by combining two wireless technologies: sub-GHz for IoT-standardized long-range wireless communication backbone and UWB for localization.
- Optimization of the energy consumption of the UWB radio by designing a multi-technology, duty cycling time-slotted UWB MAC protocol.
- Theoretical evaluation of the design choices on overall system performance in terms of update rate, energy consumption, range and scalability
- Experimental validation of the system for two real-life scenarios: autonomous drone navigation and tracking of runners in sport halls.
- Providing the source-code of the UWB hardware and MAC protocol software as open-source contributions [14].
2. Related Work
2.1. Drone-Based Inventory Taking
2.2. Infrastructure-Light UWB Solutions
3. UWB Localization System Design
3.1. High Level Design
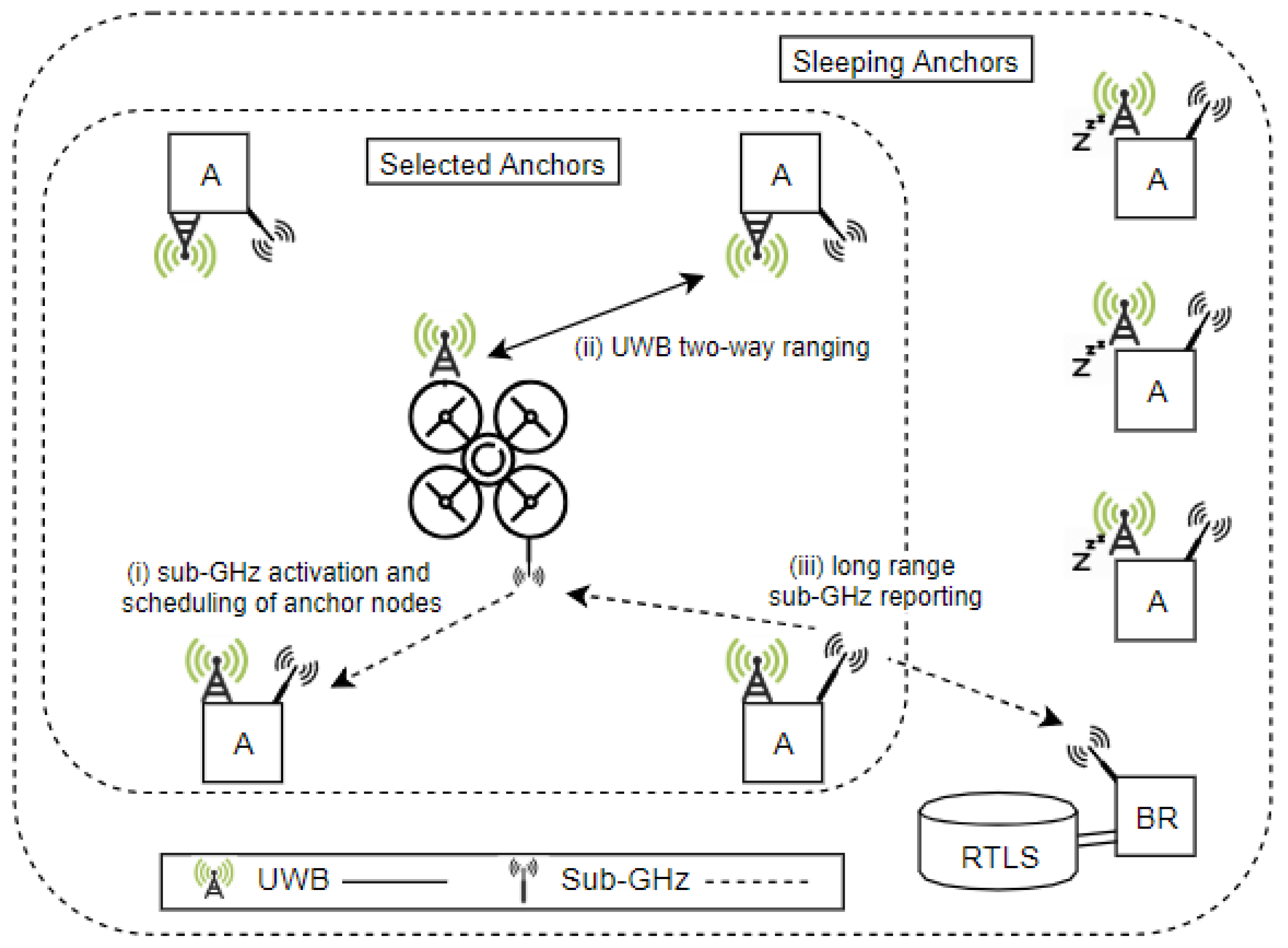
- To remedy the need for wired access points, some UWB solutions [12] have proposed the use of WiFi based multi-hop mesh networks. However, a multi-hop wireless networking approach has several disadvantages. (i) Multi-hop networking protocols are scalable towards only a limited number of hops and are thus not suitable for very large warehouse environments, (ii) data transmissions required multiple hops thereby reducing the available throughput and impacting reliability and (iii) WiFi cards typically have high energy consumption, thus limiting their suitability for battery powered anchor nodes. Instead, our solution connects UWB anchor nodes using a backbone of low-power sub-GHz communications which have a much larger range, of up to several kms [21]. In addition, these long ranges can even be extended using RPL (IPv6 Routing Protocol for Low-Power and Lossy Networks) [22], which has been shown to be more scalable than WiFi ad-hoc routing protocols, with network scaling up to hundred of devices [23,24].
- To reduce the anchor node energy consumption, we observe that most UWB positioning systems use always-on UWB radios, which are highly energy consuming. Since drones will not be present continuously at each location, we propose to turn off the UWB radio when no drones are nearby. Instead, UWB anchor nodes continuously listen using their low power sub-GHz radio. The drone will activate anchor nodes using an low-energy sub-GHz activation beacon when he is nearby, but only (i) when he actually wants to range with the anchor node and (ii) during a small TDMA based time slot. As such, anchor nodes remain in a low-power mode most of the time, and only activate the UWB radio during short timeslots when drones are nearby.
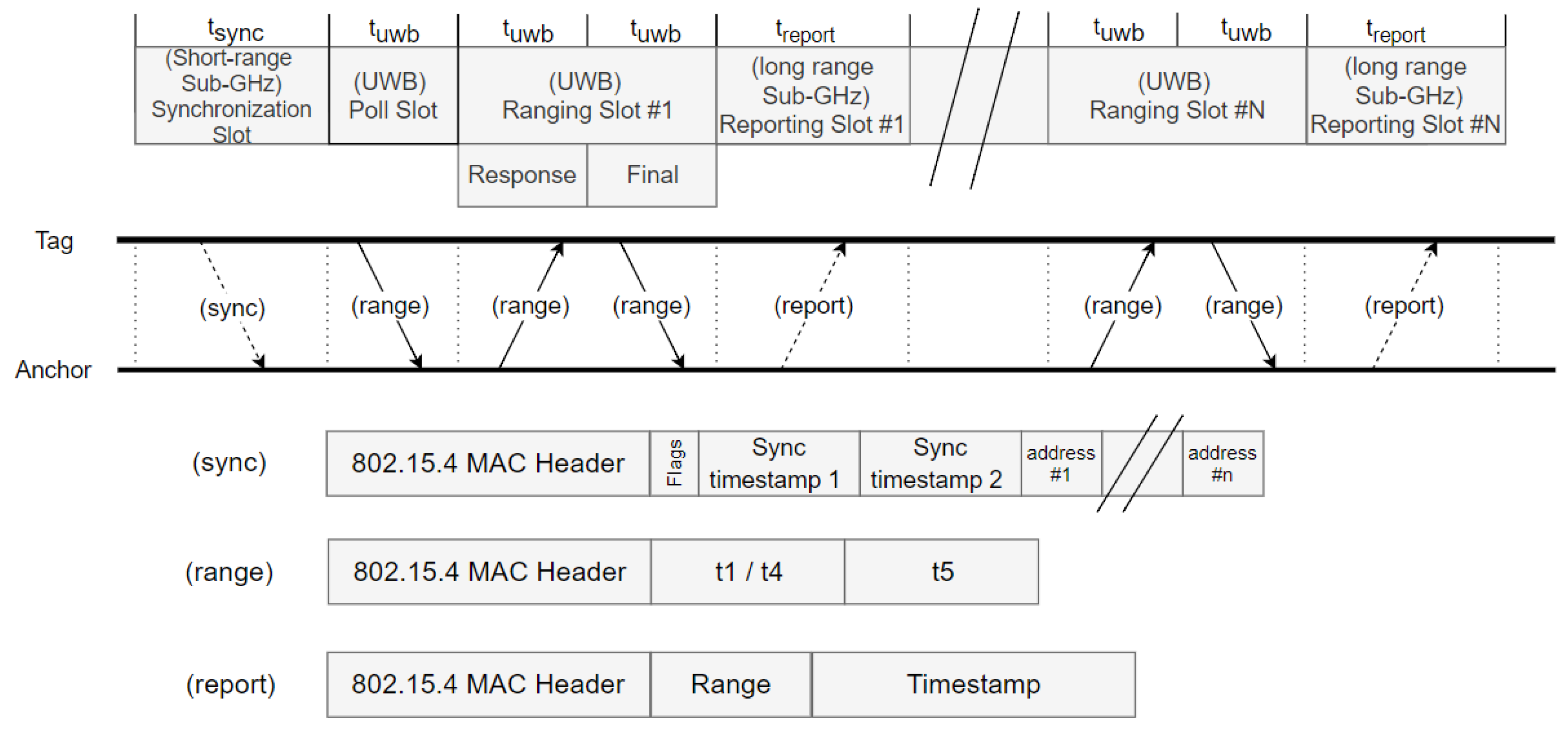
3.2. MAC Design
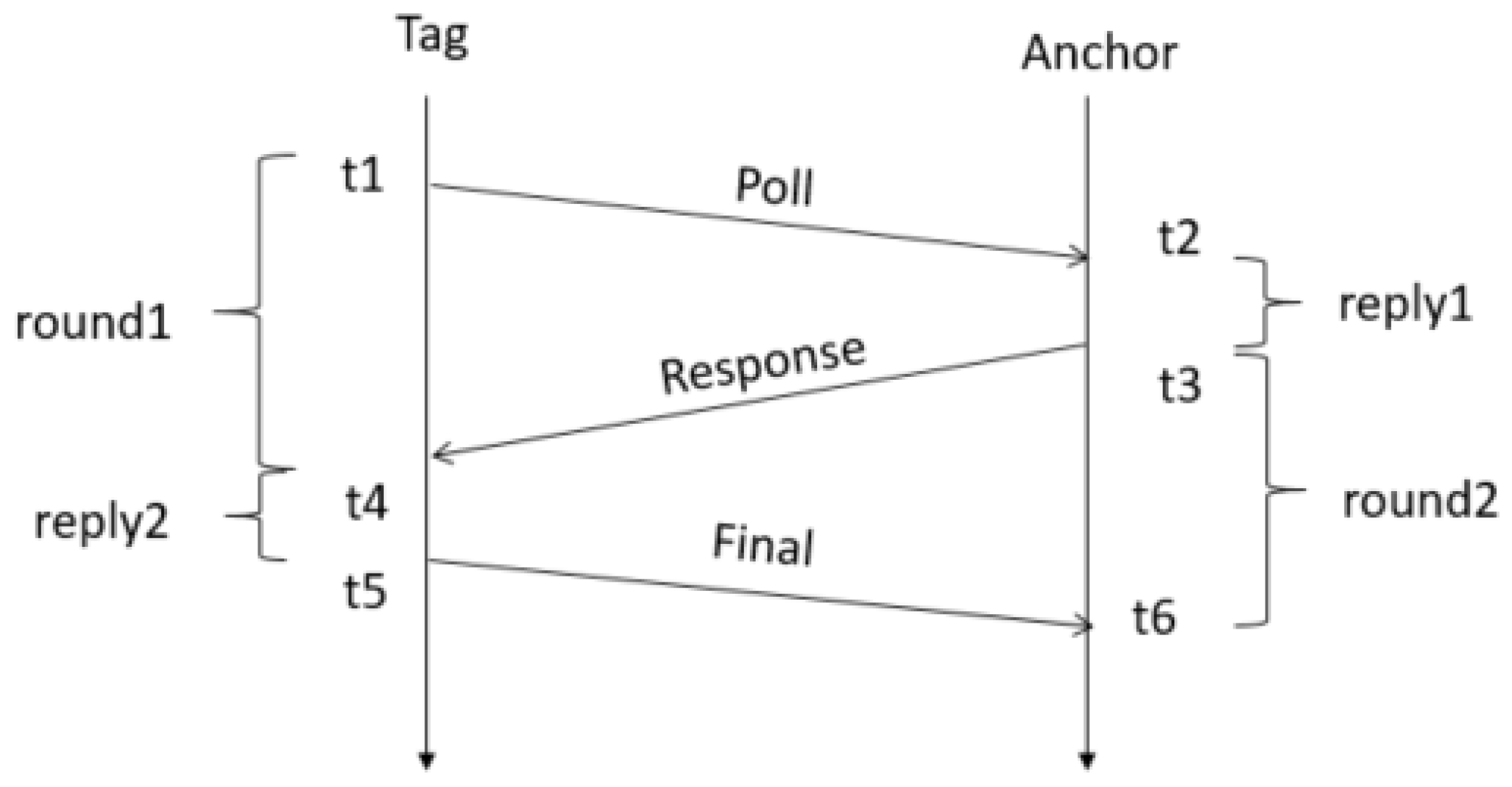
3.2.1. Ranging Scheme
3.3. Collision Avoidance and Multiple Mobile Tags
3.4. Anchor Node Selection
- During bootstrapping, the UAV has no prior information regarding its position. As such, during initialization, the set of neighbors is populated with random anchor node IDs, selecting anchor nodes at random until the UAV receives at least one ranging message.
- During the operational lifetime, the set is continuously updated to use the anchor nodes that are nearest. To this end, at the end of each superframe, the UAV selects the most nearby anchor that the tag is currently ranging with. For subsequent superframes, the UAV each time selects the set of anchor nodes that are closest to the nearest anchor node (prior to deployment, the drone is provided either with all anchor node locations, or with a dictionary where for each anchor node, the most nearby anchor nodes are provided.)
3.5. Position Calculation
3.6. Further Optimizations
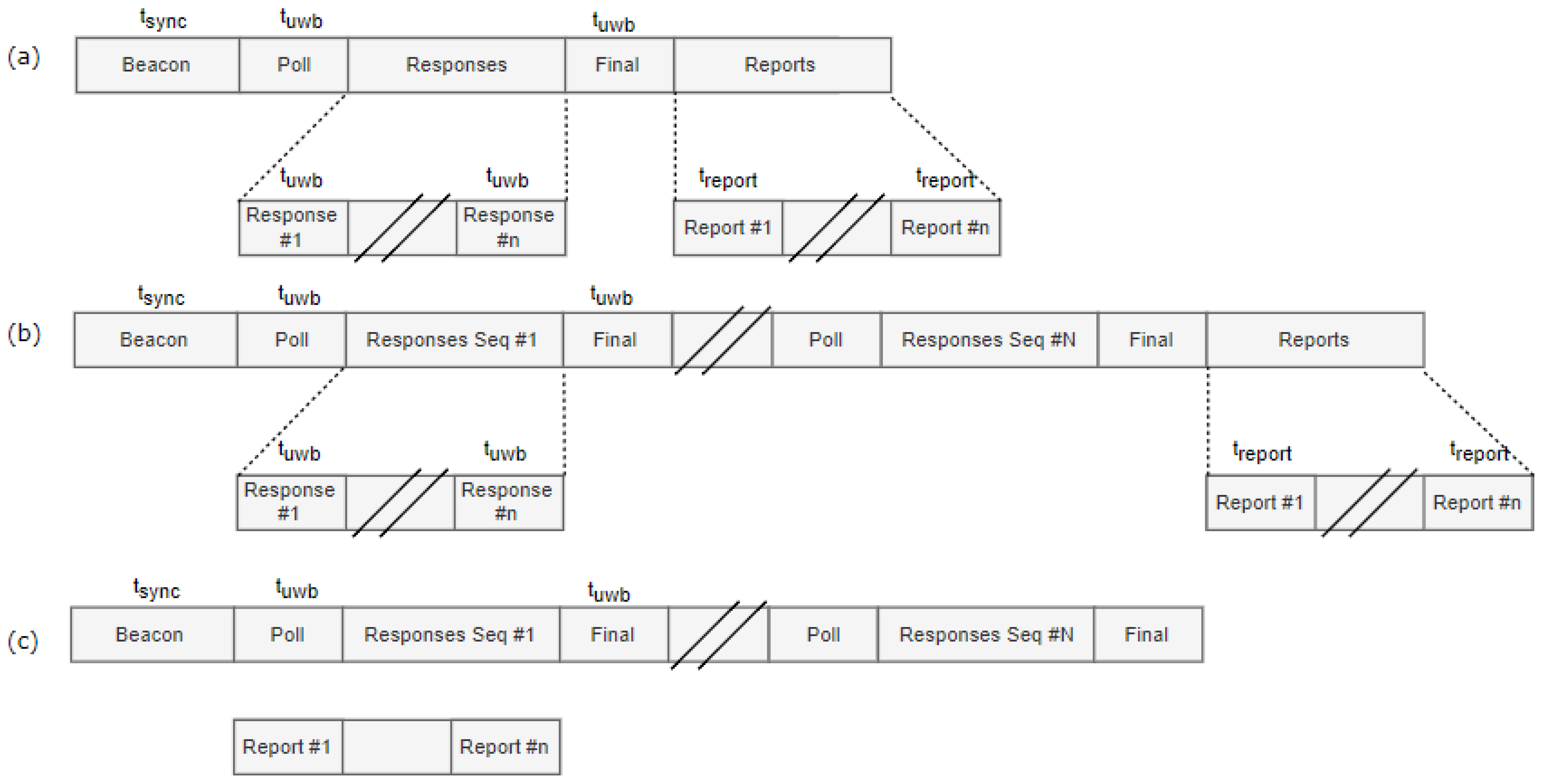
3.6.1. Optimization I: Single Final UWB Message
3.6.2. Optimization II: Multiple Ranging Sequences
3.6.3. Optimization III: Concurrent Radios
4. Implementation and Evaluation Setup
4.1. Hardware Board
4.2. Software Implementation
4.3. Radio Settings
- For the UWB radio, two configuration options will be evaluated in the following section. The first setting UWB corresponds to the slowest bitrate and largest preamble. This settings has the highest accuracy ranging, but negatively impacts the update rate due to the longer packet durations. In contrast, the UWB settings result in lowest energy consumption and larger update rates, but result in reduced ranging accuracy. The impact of these settings will be evaluated in the next section.
- For the sub-GHz radio, two different configurations are used during each MAC superframe. (i) The sub-GHz is used by the anchor nodes to report the ranging results to a remote server. This setting uses a low datarate and large preamble settings to maximize the range. (ii) In contrast, the sub-GHz setting uses a higher bitrate and lower preamble to maximize the datarate. This last setting is used by the mobile tag to wake up and synchronize nearby anchor nodes. In this case, high datarates are preferable since the higher datarate reduces the length of the beacon slot of the TDMA, and the reduced range has no impact since the tag only needs to wake up anchor nodes which are nearby.
4.4. Proof-of-Concept Deployments
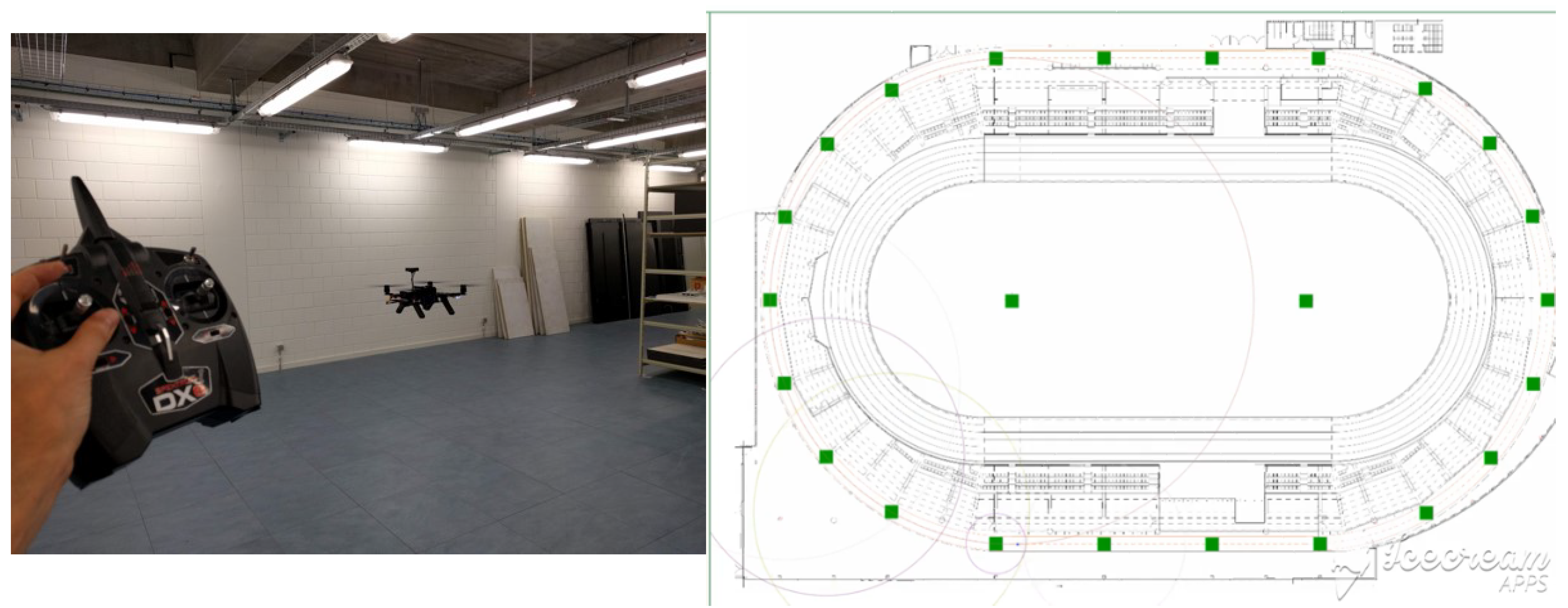
- A small-scale set-up of the localization system has been used for autonomous drone navigation for inventory-taking (Figure 6a). The drone is localized using battery-powered anchor nodes and autonomously traverses a path next to warehouse racks. All assets are equipped with QR codes, which are scanned with a drone-mounted camera. A video of the demo can be found on https://youtu.be/NyL4-R8QEH8.
- A large-scale installation of the system has been installed for tracking runners during their training in the sporting hall in Ghent (Figure 6b). The indoor training track is located beneath the main tribune, and as such is shielded from the outside by metal and reinforced concrete. No existing infrastructure (Wi-Fi, DC power, Ethernet or 4 G) is available. The designed infrastructure-light UWB localization solution was hence a good candidate to provide training insights based on location tracking. The whole 400 m circular track was covered using 20 anchor nodes, all of which could communicate with a single gateway with Ethernet uplink due to the use of long-range sub-GHz communication.
5. System Performance Evaluation
5.1. Update Frequency
5.1.1. Theoretical Calculation
5.1.2. Experimental Validation
5.2. Current Consumption
- The current consumption for transmission and reception on the UWB radio are depending on several PHY settings. Higher frequency channels consume more power than lower frequency channels. Long preamble, payload length and high datarate results in longer packet duration and thus more current demand. The exact current consumption in TX and RX can be found in the Decawave DW1000 user manual [32], and varies between 48 and 117 mA. In contrast, the UWB radio-chip consumes only 1 A in SLEEP-mode and only 100 nA in DEEPSLEEP (the chip can be woken up by setting a programmed sleep count or by using an external pin. This requires only the low power oscillator and the internal sleep counter to be active. To enable external micro-controller access, the lowest power state is the INIT-state, which consumes 4 mA. For full speed SPI access and internal clock, the IDLE-mode consumes 12 mA.)
- Also the current consumption of the CC1200 depends on the chosen output power (up to 16 dB) and the PHY settings of the radio. The consumption for the chip for reception varies from 17 to 23 mA and for transmission from 34 to 45 mA [35]. In SLEEP mode, it only consumes 0.5 A.
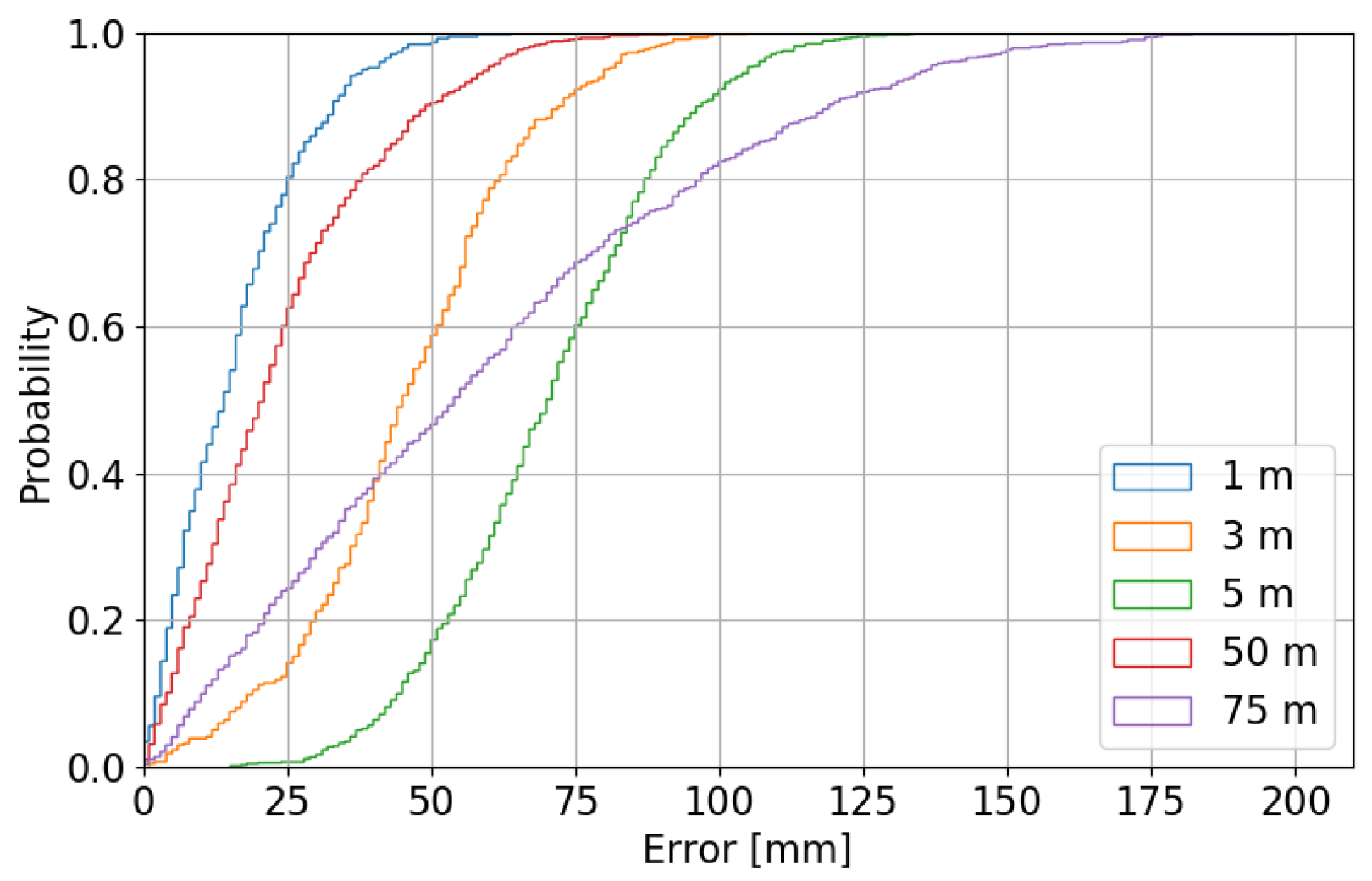
5.3. Localization Accuracy
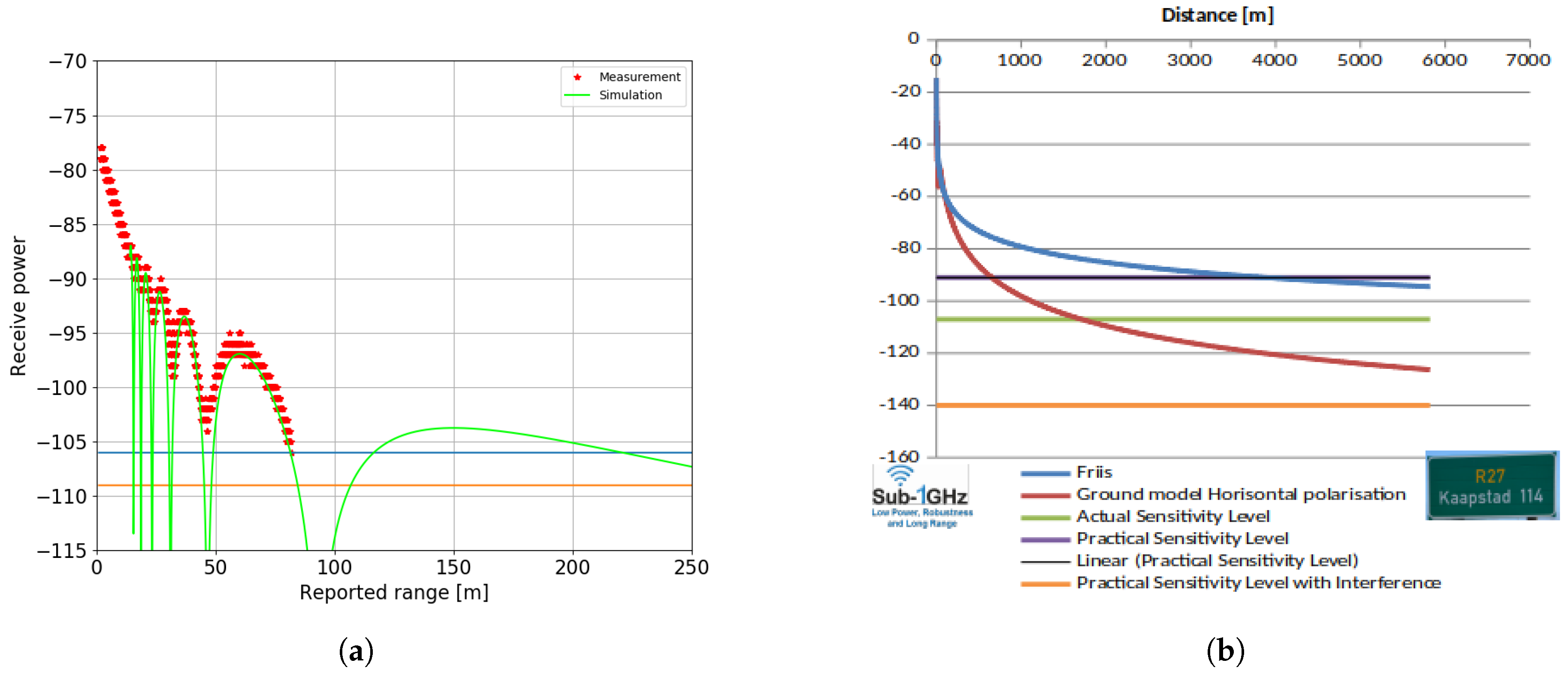
5.4. Maximum Communication Range
6. Future Work
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Ellis, S.; Knickle, L.V.; Brown, V. White Paper: Digital Transformation Drives Supply Chain Restructuring Imperative. Available online: https://www.opentext.com/file_source/OpenText/en_US/PDF/opentext-idc-digital-transformation-supply-chain.pdf (accessed on 23 September 2018).
- Atieh, A.M.; Kaylani, H.; Al-abdallat, Y.; Qaderi, A.; Ghoul, L.; Jaradat, L.; Hdairis, I. Performance Improvement of Inventory Management System Processes by an Automated Warehouse Management System. Procedia CIRP 2016, 41, 568–572. [Google Scholar] [CrossRef] [Green Version]
- Tiemann, J.; Wietfeld, C. Scalable and precise multi-UAV indoor navigation using TDOA-based UWB localization. In Proceedings of the International Conference on Indoor Positioning and Indoor Navigation (IPIN), Sapporo, Japan, 18–21 September 2017; pp. 1–7. [Google Scholar]
- Warehouse Drone Inventory Management. Available online: https://www.pinc.com/ (accessed on 10 September 2018).
- Eyesee Drone Solutions. Available online: https://eyesee-drone.com/ (accessed on 10 September 2018).
- Karapistoli, E.; Pavlidou, F.; Gragopoulos, I.; Tsetsinas, I. An overview of the IEEE 802.15.4a Standard. IEEE Commun. Mag. 2010, 48, 47–53. [Google Scholar] [CrossRef]
- Geng, S.; Ranvier, S.; Zhao, X.; Kivinen, J.; Vainikainen, P. Multipath propagation characterization of ultra-wide band indoor radio channels. In Proceedings of the IEEE International Conference on Ultra-Wideband, Zurich, Switzerland, 5–8 September 2005. [Google Scholar]
- Tinqting, Z.; Qinyu, Z.; Naiionq, Z.; Hongguang, X. Performance analysis of an indoor UWB ranging system. J. Syst. Eng. Electron. 2009, 20, 450–456. [Google Scholar]
- Zhang, C.; Kuhn, M.J.; Merkl, B.C.; Fathy, A.E.; Mahfouz, M.R. Real-Time Noncoherent UWB Positioning Radar With Millimeter Range Accuracy: Theory and Experiment. IEEE Trans. Microw. Theory Tech. 2010, 58, 9–20. [Google Scholar] [CrossRef]
- Jourdan, D.B.; Dardari, D.; Win, M.Z. Position Error Bound for UWB Localization in Dense Cluttered Environments. In Proceedings of the IEEE International Conference on Communications, Istanbul, Turkey, 11–15 June 2006. [Google Scholar]
- Maalek, R.; Sadeghpour, F. Accuracy assessment of Ultra-Wide Band technology in tracking static resources in indoor construction scenarios. Autom. Construct. 2013, 30, 170–183. [Google Scholar] [CrossRef]
- Ridolfi, M.; de Velde, S.V.; Steendam, H.; De Poorter, E. WiFi ad-hoc mesh network and MAC protocol solution for UWB indoor localization systems. In Proceedings of the Symposium on Communications and Vehicular Technologies, Mons, Belgium, 22 November 2016. [Google Scholar]
- Macoir, N.; Ridolfi, M.; Rossey, J.; Moerman, I.; De Poorter, E. MAC Protocol for Supporting Multiple Roaming Users in Mult-Cell UWB Localization Networks. In Proceedings of the IEEE 19th International Symposium on “A World of Wireless, Mobile and Multimedia Networks“, Chania, Greece, 12–15 June 2018. [Google Scholar]
- Our Solution on GitLab. Available online: https://gitlab.ilabt.imec.be/openuwb (accessed on 10 December 2018).
- Dronescan. Available online: http://www.dronescan.co (accessed on 10 September 2018).
- Mashood, A.; Dirir, A.; Hussein, M.; Noura, H.; Awwad, F. Quadrotor object tracking using real-time motion sensing. In Proceedings of the 5th International Conference on Electronic Devices, Systems and Applications (ICEDSA), Ras Al Khaimah, United Arab, 6–8 December 2016. [Google Scholar]
- Sewio. Available online: https://www.sewio.net/ (accessed on 8 October 2018).
- Eliko. Available online: https://www.eliko.ee/ (accessed on 8 October 2018).
- Tracking and IOT Solutions. Available online: http://www.tracktio.com (accessed on 8 October 2018).
- OpenRTLS. Available online: https://openrtls.com/ (accessed on 21 October 2018).
- Texas Instruments. Application Note: Achieving Optimum Radio Range (Rev. A). Available online: http://www.ti.com/lit/an/swra479a/swra479a.pdf (accessed on 3 December 2018).
- Winter, E.A. RPL: IPv6 Routing Protocol for Low-Power and Lossy Networks. Available online: https://tools.ietf.org/html/rfc6550 (accessed on 22 November 2018).
- Iova, O.; Picco, P.; Istomin, T.; Kiraly, C. RPL: The Routing Standard for the Internet of Things... Or Is It? IEEE Commun. Mag. 2016, 54, 16–22. [Google Scholar] [CrossRef] [Green Version]
- Kharrufa, H.; Al-Kashoash, H.; Al-Nidawi, Y.; Mosquera, M.Q.; Kemp, A.H. Dynamic RPL for multi-hop routing in IoT applications. In Proceedings of the 13th Annual Conference on Wireless On-demand Network Systems and Services (WONS), Jackson, WY, USA, 21–24 February 2017. [Google Scholar]
- Decawave. APPLICATION NOTE: Sources of Error in DW1000 Based TWR Schemes. Available online: https://www.decawave.com/wp-content/uploads/2018/08/aps011_sources_of_error_in_twr.pdf (accessed on 3 November 2018).
- Low-Rate Wireless Personal Area Networks (LR-WPANs). Available online: https://ieeexplore.ieee.org/document/6012487 (accessed on 20 October 2018).
- Ridolfi, M.; Van de Velde, S.; Steendam, H.; De Poorter, E. Analysis of the Scalability of UWB Indoor Localization Solutions for High User Densities. Sensors 2018, 18, 1875. [Google Scholar] [CrossRef] [PubMed]
- Jung, J.; Myung, H. Indoor localization using particle filter and map-based NLOS ranging model. In Proceedings of the IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011. [Google Scholar]
- Zhang, C.; Bao, X.; Wei, Q.; Ma, Q.; Yang, Y.; Wang, Q. A Kalman filter for UWB positioning in LOS/NLOS scenarios. In Proceedings of the Fourth International Conference on Ubiquitous Positioning, Indoor Navigation and Location Based Services (UPINLBS), Shanghai, China, 2–4 November 2016. [Google Scholar]
- Ridolfi, M.; Vandermeeren, S.; Defraye, J.; Steendam, H.; Gerlo, J.; De Clercq, D.; Hoebeke, J.; De Poorter, E. Experimental Evaluation of UWB Indoor Positioning for Sport Postures. Sensors 2018, 18, 168. [Google Scholar] [CrossRef] [PubMed]
- Zolertia Re-Mote. Available online: http://zolertia.io/product/hardware/re-mote (accessed on 4 September 2018).
- Decawave DW1000 Datasheet. Available online: https://www.decawave.com/products/dw1000 (accessed on 1 September 2018).
- Jooris, B.; Bauwens, J.; Ruckebusch, P.; De Valck, P.; Van Praet, C.; Moerman, I.; De Poorter, E. TAISC: A Cross-Platform MAC Protocol Compiler and Execution Engine. Comput. Netw. 2016, 107, 315–326. [Google Scholar] [CrossRef]
- The Constrained Application Protocol (CoAP). Available online: https://tools.ietf.org/html/rfc7252 (accessed on 23 November 2018.).
- Texas Instruments. CC1200 Low Power, High Performance RF Transceiver Data Sheet Datasheet (Rev. D). Available online: http://www.ti.com/lit/ds/symlink/cc1200.pdf (accessed on 4 December 2018.).









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Infrastructure | Anchor Powering | Release | |
|---|---|---|---|
| [17] Sewio | Wi-Fi/Ethernet | PoE | commercial |
| [18] eliko | Wi-Fi/Ethernet | PoE | commercial |
| [19] Tracktio | Ethernet | DC Power | commercial |
| [20] openRTLS | Zigbee/Ethernet | PoE/DC Power | commercial |
| [12] | Wi-Fi | DC Power | academic |
| [13] | Ethernet | DC Power | academic |
| Our work | None | Battery / energy harvester | academic |
| System on Chip | ARM Cortex-M3 |
|---|---|
| Clock speed | 32 MHz |
| Memory | 32 KB RAM 512 KB FLASH |
| Radios | CC2538: IEEE 802.15.4 (2.4 GHz) CC1200: sub-GHz IEEE 802.15.4 g (868 MHz) DW1000: UWB IEEE 802.15.4a (3.5–6 GHz) |
| Antenna | On-board (CC1200 and CC3538) SMA Connector (DW1000) |
| Protocol stack | Contiki OS |
| MAC Design Framework | Time Annotated Instruction Set Computer (TAISC) [33] |
| Channel | Datarate | Preamble | PRF | |
| Ch1 | 110 kbps | 2048 | 16 MHz | |
| Ch5 | 6.81 Mbps | 256 | 64 MHz | |
| Modulation | Datarate | Preamble | Sync | |
| sub- | 2-GFSK | 50 kbps | 4 Bytes | 2 Bytes |
| sub- | 4-GFSK | 1 Mbps | 24 Bytes | 2 Bytes |
| n | number of anchors scheduled in superframe |
| number of Preamble bits | |
| number of Start Of Frame bits | |
| number of Reed Solomon bits | |
| number of Payload bits | |
| synchronization symbol duration | |
| header symbol duration | |
| data symbol duration | |
| instruction delay | |
| radiochip delay | |
| timeslot margin |
| (UWB) | (UWB) | (UWB) | (sub-GHz) | (sub-GHz) | |
|---|---|---|---|---|---|
| Slowest setting | 2930 s | 2560 s | 3310 s | 3840 s | 1180 s |
| Fastest setting | 310 s | 300 s | 320 s | 900 s | 600 s |
| Theoretic Update Frequency (Hz) | Experimental Update Frequency (Hz) | |||
|---|---|---|---|---|
| Min. | Max. | Min. | Max. | |
| Basic | 125 | 790 | 65 | 127 |
| Optimization I | 206 | 1035 | 98 | 178 |
| Optimization II | 284 | 1841 | 136 | 276 |
| Optimization III | 343 | 2892 | 166 | 372 |
| Slowest setting | 5400 s | 6800 s | 4000 s |
| Fastest setting | 2400 s | 3800 s | 2800 s |
| Power State | [mA] | Stand-by Anchor (No Slot) | Active Anchor (One Slot) | Always-RX Anchor (Traditional Approach) | |||
|---|---|---|---|---|---|---|---|
| % | mA | % | mA | % | mA | ||
| UWB RX | 133 | - | - | 10.3 | 13.699 | 89.1 | 118.51 |
| UWB TX | 102 | - | - | 5 | 5.1 | 10.9 | 11.12 |
| UWB SLEEP | 0.001 | 100 | 0.001 | 84.7 | 0.001 | - | - |
| SubGHz RX | 23 | 14.8 | 3.404 | 14.9 | 3.427 | - | - |
| SubGHz TX | 45 | - | - | 9.8 | 4.41 | - | - |
| SubGHz SLEEP | 0.005 | 85.2 | 0.004 | 75.3 | 0.004 | - | - |
| Superframe | 100 | 3.409 | 100 | 26.641 | 100 | 129.63 | |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Macoir, N.; Bauwens, J.; Jooris, B.; Van Herbruggen, B.; Rossey, J.; Hoebeke, J.; De Poorter, E. UWB Localization with Battery-Powered Wireless Backbone for Drone-Based Inventory Management. Sensors 2019, 19, 467. https://doi.org/10.3390/s19030467
Macoir N, Bauwens J, Jooris B, Van Herbruggen B, Rossey J, Hoebeke J, De Poorter E. UWB Localization with Battery-Powered Wireless Backbone for Drone-Based Inventory Management. Sensors. 2019; 19(3):467. https://doi.org/10.3390/s19030467
Chicago/Turabian StyleMacoir, Nicola, Jan Bauwens, Bart Jooris, Ben Van Herbruggen, Jen Rossey, Jeroen Hoebeke, and Eli De Poorter. 2019. "UWB Localization with Battery-Powered Wireless Backbone for Drone-Based Inventory Management" Sensors 19, no. 3: 467. https://doi.org/10.3390/s19030467