Performance Analysis for Joint Target Parameter Estimation in UMTS-Based Passive Multistatic Radar with Antenna Arrays Using Modified Cramér-Rao Lower Bounds


Abstract
:1. Introduction
1.1. Background and Motivation
1.2. Brief Survey of Similar Work
1.3. Main Contributions
- (1)
- We formulate the signal model and derive the log-likelihood function for a multistatic radar system with UMTS-based transmit stations of antenna elements and receive stations of antenna elements. As aforementioned, it is noteworthy that references [30,31,32,33,34] only evaluate the target parameter estimation performance for a passive multistatic radar with widely distributed omnidirectional antennas and do not consider receive stations placed on moving platforms. While Khomchuk et al. in [8] concentrate on stationary platforms, and the passive multistatic radar system is ignored in [8,17]. As an extension, this paper is a much more generalized case and quite different from the obtained results in [8,17,30,31,32,33,34].
- (2)
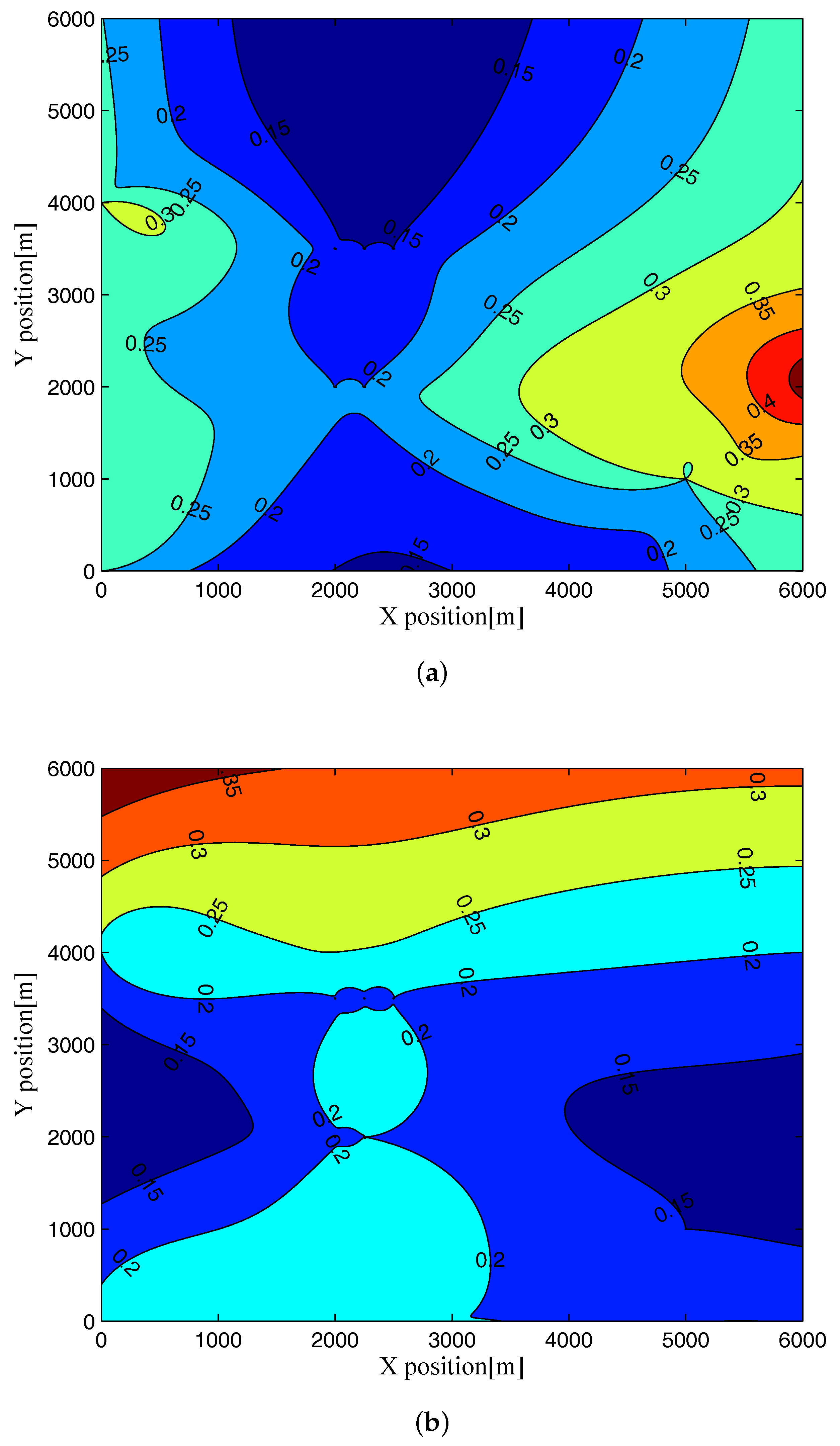
- The analytically closed-form expressions of MCRLB on the joint estimation of target position and velocity are derived in the presence of the nuisance parameters. These expressions for MCRLB can be used as a unified performance metric in that they enable the optimal placement of receive stations to improve the target parameter estimation accuracy.
- (3)
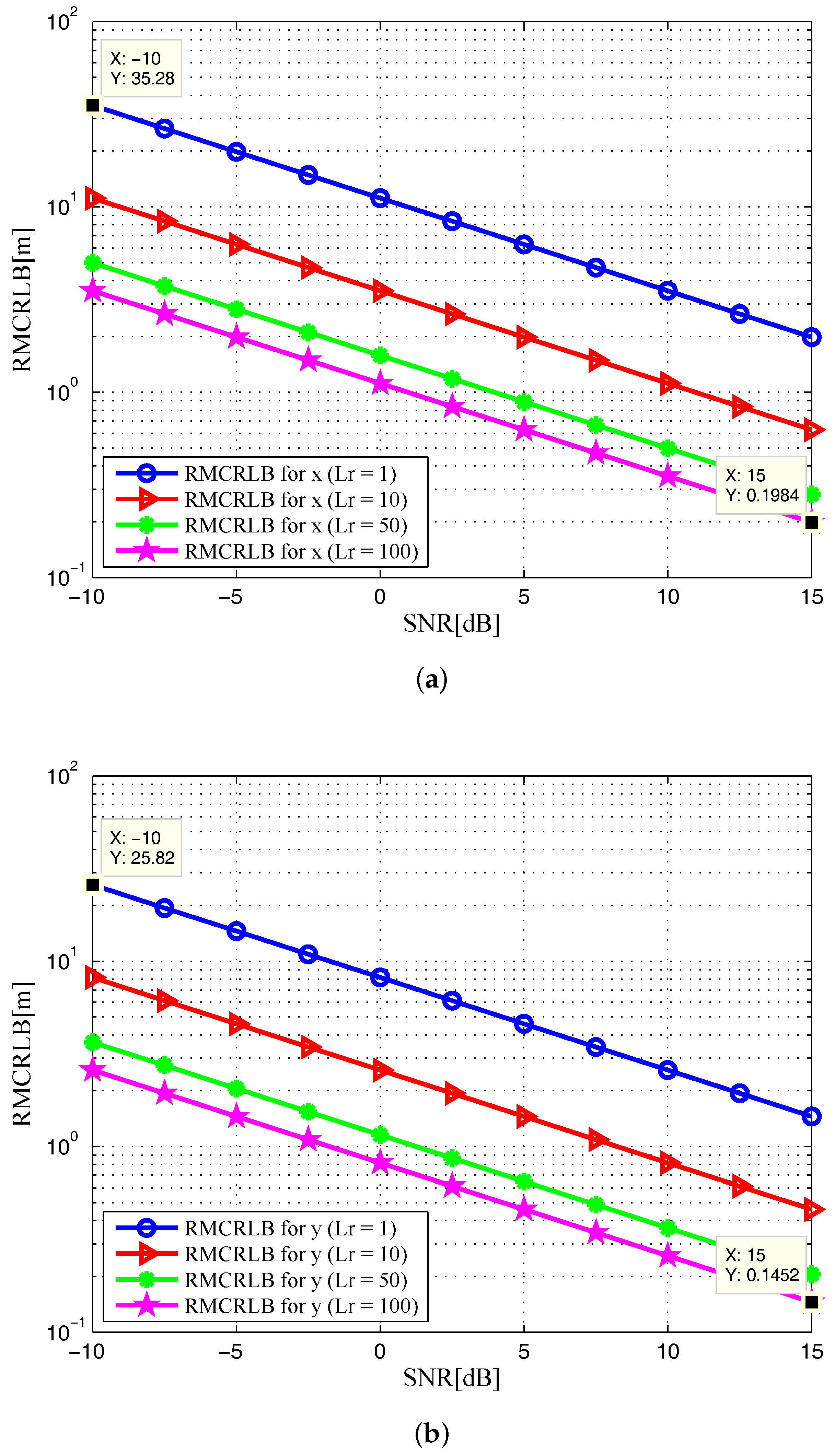
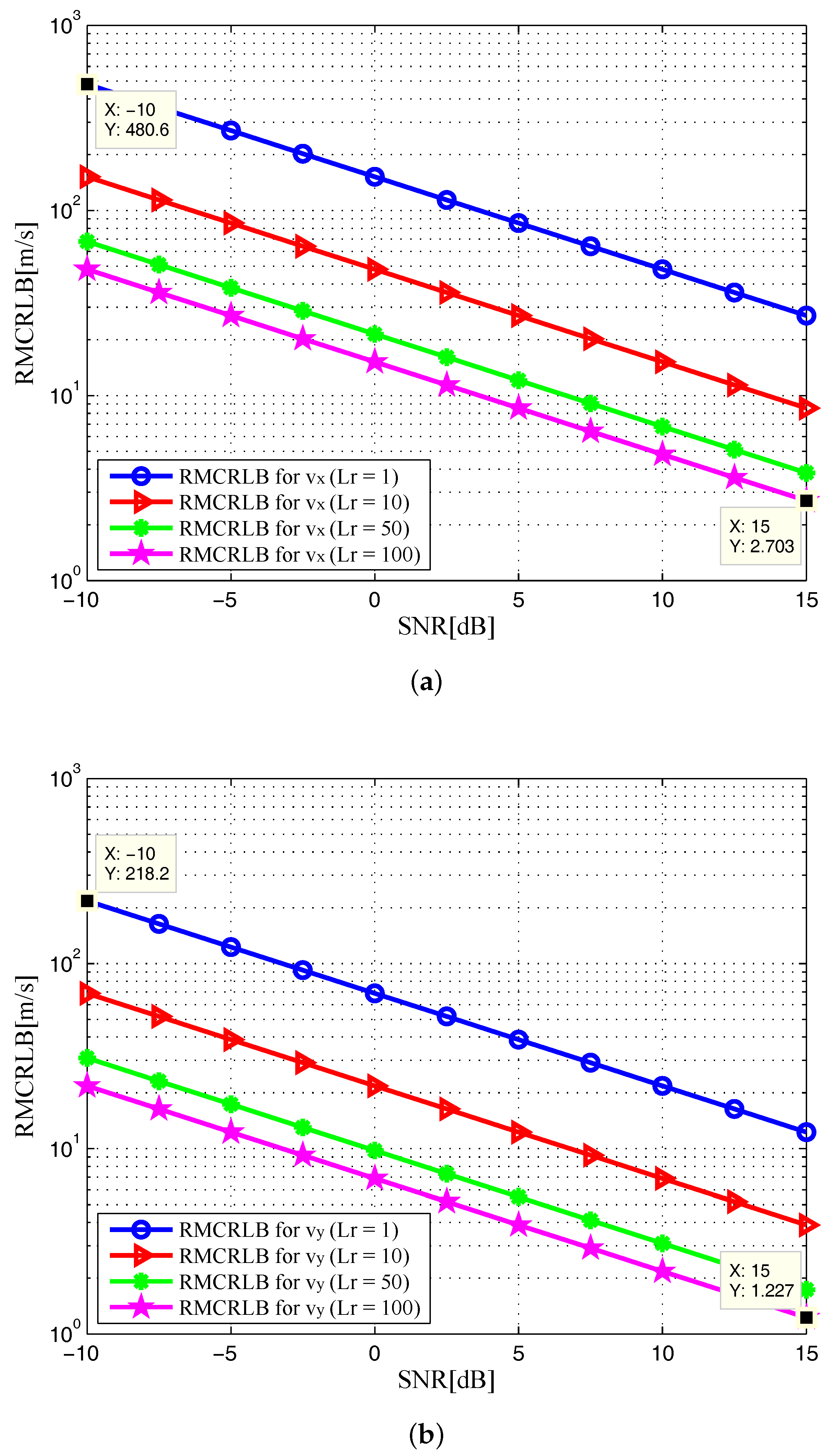
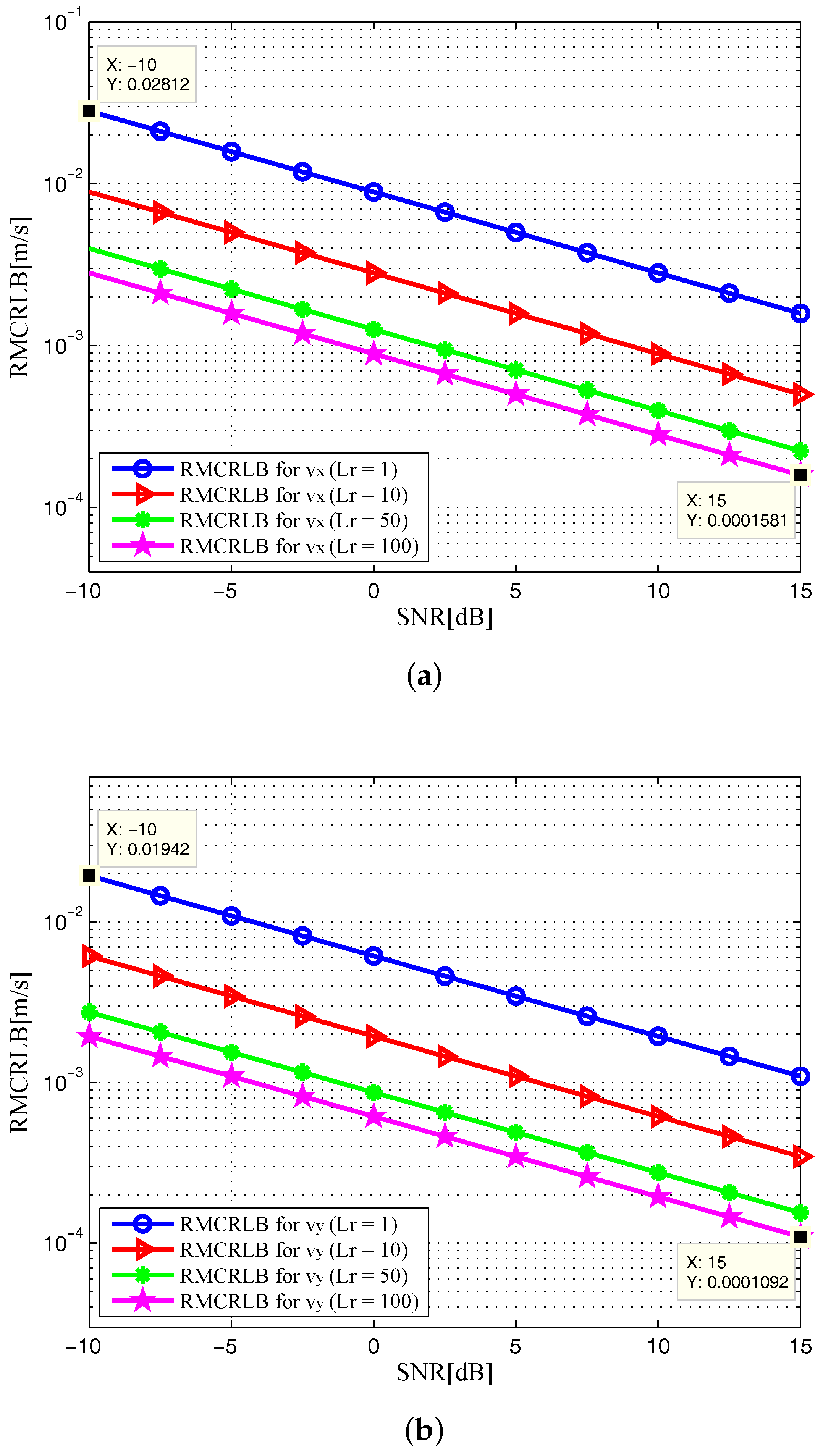
- The obtained numerical simulation results suggest that increasing the number of receiving elements in each receive station can reduce the estimation errors. Previous results in [31,32] only demonstrate that the CRLB is a function of the properties of the transmitted signals and the geometric configuration between the target and the distributed MIMO radar systems. Herein, the effects of SNR and the number of receiving antenna elements on the joint target position and velocity estimation performance are also discussed. Specifically, it is shown that the joint MCRLB is a function of SNR, the number of receiving antenna elements, the UMTS signal parameters, as well as the relative geometric architecture between the target and the passive multistatic radar systems.
1.4. Outline of the Paper
2. Signal Model
3. Maximum Likelihood Estimation
4. Derivation of Modified Cramér-Rao Lower Bound
5. Numerical Simulations and Performance Analysis
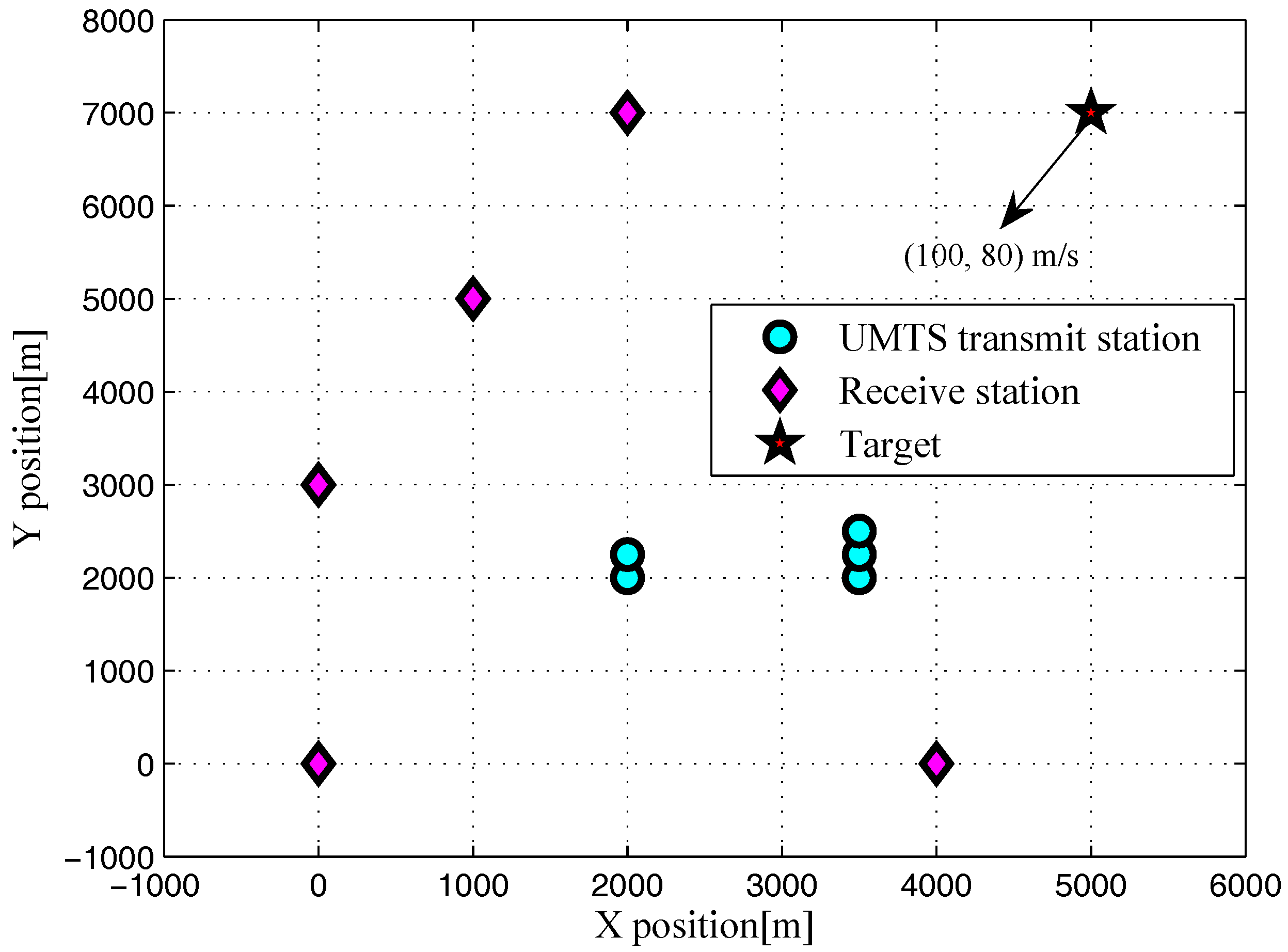
5.1. Numerical Setup
5.2. Simulation Results
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Appendix A. The Entries of Ω1, Ω2, and Ω4
Appendix B. The Detailed Derivations of J(Ψ|c)UL , J(Ψ|c)UR , J(Ψ|c)LL , and J(Ψ|c)LR
Appendix C. The Elements of FIM Jij (Φ|c)
References
- Li, J.; Stoica, P. MIMO Radar Signal Processing; Wiley: Hoboken, NJ, USA, 2009; pp. 348–381. [Google Scholar]
- Fisher, E.; Haimovich, A.; Blum, R.S.; Cimini, L.J.; Chizhik, D.; Valenzuela, R. Spatial diversity in radars—Models and detection performance. IEEE Trans. Signal Process. 2006, 54, 823–836. [Google Scholar] [CrossRef]
- Haimovich, A.M.; Blum, R.S.; Cimini, L.J., Jr. MIMO radar with widely separated antennas. IEEE Signal Process. Mag. 2008, 25, 116–129. [Google Scholar] [CrossRef]
- Chen, P.; Zheng, L.; Wang, X.D.; Li, H.B.; Wu, L.N. Moving target detection using colocated MIMO radar on multiple distributed moving platforms. IEEE Trans. Signal Process. 2017, 65, 4670–4683. [Google Scholar] [CrossRef]
- Naghsh, M.M.; Mahmoud, M.H.; Shahram, S.P.; Soltanalian, M.; Stoica, P. Unified optimization framework for multi-static radar code design using information-theoretic criteria. IEEE Trans. Signal Process. 2013, 61, 5401–5416. [Google Scholar] [CrossRef]
- Niu, R.X.; Blum, R.S.; Varshney, P.K.; Drozd, A.L. Target localization and tracking in noncoherent multiple-input multiple-output radar systems. IEEE Trans. Aerosp. Electron. Syst. 2010, 48, 1466–1487. [Google Scholar] [CrossRef]
- Godrich, H.; Petropulu, A.P.; Poor, H.V. Power allocation strategies for target localization in distributed multiple-radar architectures. IEEE Trans. Signal Process. 2011, 59, 3226–3240. [Google Scholar] [CrossRef]
- Khomchuk, P.; Blum, R.S.; Bilik, I. Performance analysis of target parameters estimation using multiple widely separated antenna arrays. IEEE Trans. Aerosp. Electron. Syst. 2016, 52, 2413–2435. [Google Scholar] [CrossRef]
- Godrich, H.; Haimovich, A.M.; Blum, R.S. Target localization accuracy gain in MIMO radar-based systems. IEEE Trans. Inf. Theory 2010, 56, 2783–2803. [Google Scholar] [CrossRef]
- He, Q.; Blum, R.S.; Haimovich, A.M. Noncoherent MIMO radar for location and velocity estimation: More antennas means better performance. IEEE Trans. Signal Process. 2010, 58, 3661–3680. [Google Scholar] [CrossRef]
- He, Q.; Blum, R.S.; Godrich, H.; Haimovich, A.M. Target velocity estimation and antenna placement for MIMO radar with widely separated antennas. IEEE J. Sel. Top. Signal Process. 2010, 4, 79–100. [Google Scholar] [CrossRef]
- He, Q.; Blum, R.S. Noncoherent versus coherent MIMO radar: Performance and simplicity analysis. Signal Process. 2012, 92, 2454–2463. [Google Scholar] [CrossRef]
- Wei, C.; He, Q.; Blum, R.S. Cramer-Rao bound for joint location and velocity estimation in multi-target non-coherent MIMO radars. In Proceedings of the 2010 44th Annual Conference on Information Sciences and Systems (CISS), Princeton, NJ, USA, 17–19 March 2010. [Google Scholar]
- He, Q.; Blum, R.S.; Haimovich, A.M. Generalized Cramér-Rao bound for joint estimation of target position and velocity for active and passive radar networks. IEEE Trans. Signal Process. 2016, 64, 2078–2089. [Google Scholar] [CrossRef]
- Zhao, T.; Huang, T.Y. Cramer-Rao lower bounds for the joint delay-Doppler estimation of an extended extended target. IEEE Trans. Signal Process. 2016, 64, 1562–1573. [Google Scholar] [CrossRef]
- Shi, C.G.; Salous, S.; Wang, F.; Zhou, J.J. Cramer-Rao lower bound evaluation for linear frequency modulation based active radar networks operating in a Rice fading environment. Sensors 2016, 16, 2072. [Google Scholar] [CrossRef] [PubMed]
- Cheng, Z.Y.; He, Z.S.; Zheng, X.J. CRB for joint estimation of moving target in distributed phased array radars on moving platforms. In Proceedings of the IEEE 13th International Conference on Signal Processing (ICSP), Chengdu, China, 6–10 November 2016; pp. 1461–1465. [Google Scholar]
- Ferreol, A.; Larzabal, M.; Viberg, M. On the asymptotic performance analysis of subspace DOA estimation in the presence of modeling errors: Case of MUSIC. IEEE Trans. Signal Process. 2006, 54, 907–920. [Google Scholar] [CrossRef]
- Ciuonzo, D.; Romano, G.; Solimene, R. Performance analysis of time-reversal MUSIC. IEEE Trans. Signal Process. 2015, 63, 2650–2662. [Google Scholar] [CrossRef]
- Ciuonzo, D.; Romano, G.; Solimene, R. On MSE performance of time-reversal MUSIC. In Proceedings of the 2014 IEEE 8th Sensor Array and Multichannel Signal Processing Workshop (SAM), A Coruna, Spain, 22–25 June 2014; pp. 13–16. [Google Scholar]
- Hack, D.E.; Patton, L.K.; Himed, B.; Saville, M.A. Detection in passive MIMO radar networks. IEEE Trans. Signal Process. 2014, 62, 2999–3012. [Google Scholar] [CrossRef]
- Zaimbashi, A. Target detection in analog terrestrial TV-based passive radar sensor: Joint delay-Doppler estimation. IEEE Sens. J. 2017, 17, 5569–5580. [Google Scholar] [CrossRef]
- Greco, M.S.; Stinco, P.; Gini, F.; Farina, A. Cramer-Rao bounds and selection of bistatic channels for multistatic radar systems. IEEE Trans. Aerosp. Electron. Syst. 2011, 47, 2934–2948. [Google Scholar] [CrossRef]
- Pace, P.E. Detecting and Classifying Low Probability of Intercept Radar; Artech House: Boston, MA, USA, 2009; pp. 319–378. [Google Scholar]
- Shi, C.G.; Salous, S.; Wang, F.; Zhou, J.J. Power allocation for target detection in radar networks based on low probability of intercept: A cooperative game theoretical strategy. Radio Sci. 2017, 52, 1030–1045. [Google Scholar] [CrossRef]
- Zhang, Z.K.; Tian, Y.B. A novel resource scheduling method of netted radars based on Markov decision process during target tracking in clutter. EURASIP J. Adv. Signal Process. 2016, 16, 1–9. [Google Scholar] [CrossRef]
- Shi, C.G.; Zhou, J.J.; Wang, F. LPI based resource management for target tracking in distributed radar network. In Proceedings of the 2015 IEEE International Conference on Signal Processing, Communications and Computing (ICSPCC), Ningbo, China, 19–22 September 2015; pp. 822–826. [Google Scholar]
- Shi, C.G.; Wang, F.; Sellathurai, M.; Zhou, J.J. Low probability of intercept based multicarrier radar jamming power allocation for joint radar and wireless communications systems. IET Radar Sonar Navig. 2017, 11, 802–811. [Google Scholar] [CrossRef]
- Li, N.J. Radar ECCMS new area: Anti-stealth and anti-ARM. IEEE Trans. Aerosp. Electron. Syst. 1995, 31, 1120–1127. [Google Scholar]
- Shi, C.G.; Wang, F.; Zhou, J.J. Cramér-Rao bound analysis for joint target position and velocity estimation in FM-based passive radar networks. IET Signal Process. 2016, 10, 780–790. [Google Scholar] [CrossRef]
- Gogineni, S.; Rangaswamy, M.; Rigling, B.D.; Nehorai, A. Cramér-Rao bounds for UMTS-based passive multistatic radar. IEEE Trans. Signal Process. 2014, 62, 95–105. [Google Scholar] [CrossRef]
- Javed, M.N.; Ali, S.; Hassan, S.A. 3D MCRLB evaluation of a UMTS-based passive multistatic radar operating in a line-of-sight environment. IEEE Trans. Signal Process. 2016, 64, 5131–5144. [Google Scholar] [CrossRef]
- Filip, A.; Shutin, D. Cramer-Rao bounds for L-band digital aeronautical communication system type 1 based passive multiple-input multiple-output radar. IET Radar Sonar Navig. 2016, 10, 348–358. [Google Scholar] [CrossRef]
- Shi, C.G.; Salous, S.; Wang, F.; Zhou, J.J. Modified Cramér-Rao lower bounds for joint position and velocity estimation of a Rician target in OFDM-based passive radar networks. Radio Sci. 2017, 52, 15–33. [Google Scholar] [CrossRef]
- Shi, C.G.; Wang, F.; Sellathurai, M.; Zhou, J.J. Transmitter subset selection in FM-based passive radar networks for joint target parameter estimation. IEEE Sensors J. 2016, 16, 6043–6052. [Google Scholar] [CrossRef]
- Xie, R.; Wan, X.R.; Hong, S.; Yi, J.X. Joint optimization of receiver placement and illuminator selection for a multiband passive radar network. Sensors 2017, 17, 1–20. [Google Scholar] [CrossRef] [PubMed]
- He, Q.; Blum, R.S. The significant gains from optimally processed multiple signals of opportunity and multiple receive stations in passive radar. IEEE Signal Process. Lett. 2014, 21, 180–184. [Google Scholar] [CrossRef]
- Jardak, S.; Ahmed, S.; Alouini, M.S. Low complexity joint estimation of reflection coefficient, spatial location, and Doppler shift for MIMO-radar by exploiting 2D-FFT. In Proceedings of the 2014 International Radar Conference (Radar), Lille, France, 13–17 October 2014. [Google Scholar]
- Tian, J.; Cui, W.; Lv, X.L.; Wu, S.; Hou, J.G.; Wu, S.L. Joint estimation algorithm for multi-targets’ motion parameters. IET Radar Sonar Navig. 2014, 8, 939–945. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Transmit Station Index | Positions [m] |
|---|---|
| Transmitter Index | Positions [m] | Velocities [m/s] |
|---|---|---|
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shi, C.; Wang, F.; Salous, S.; Zhou, J. Performance Analysis for Joint Target Parameter Estimation in UMTS-Based Passive Multistatic Radar with Antenna Arrays Using Modified Cramér-Rao Lower Bounds. Sensors 2017, 17, 2379. https://doi.org/10.3390/s17102379
Shi C, Wang F, Salous S, Zhou J. Performance Analysis for Joint Target Parameter Estimation in UMTS-Based Passive Multistatic Radar with Antenna Arrays Using Modified Cramér-Rao Lower Bounds. Sensors. 2017; 17(10):2379. https://doi.org/10.3390/s17102379
Chicago/Turabian StyleShi, Chenguang, Fei Wang, Sana Salous, and Jianjiang Zhou. 2017. "Performance Analysis for Joint Target Parameter Estimation in UMTS-Based Passive Multistatic Radar with Antenna Arrays Using Modified Cramér-Rao Lower Bounds" Sensors 17, no. 10: 2379. https://doi.org/10.3390/s17102379