Design and Implementation of a Smart Home System Using Multisensor Data Fusion Technology

 ,
,
Abstract
:1. Introduction
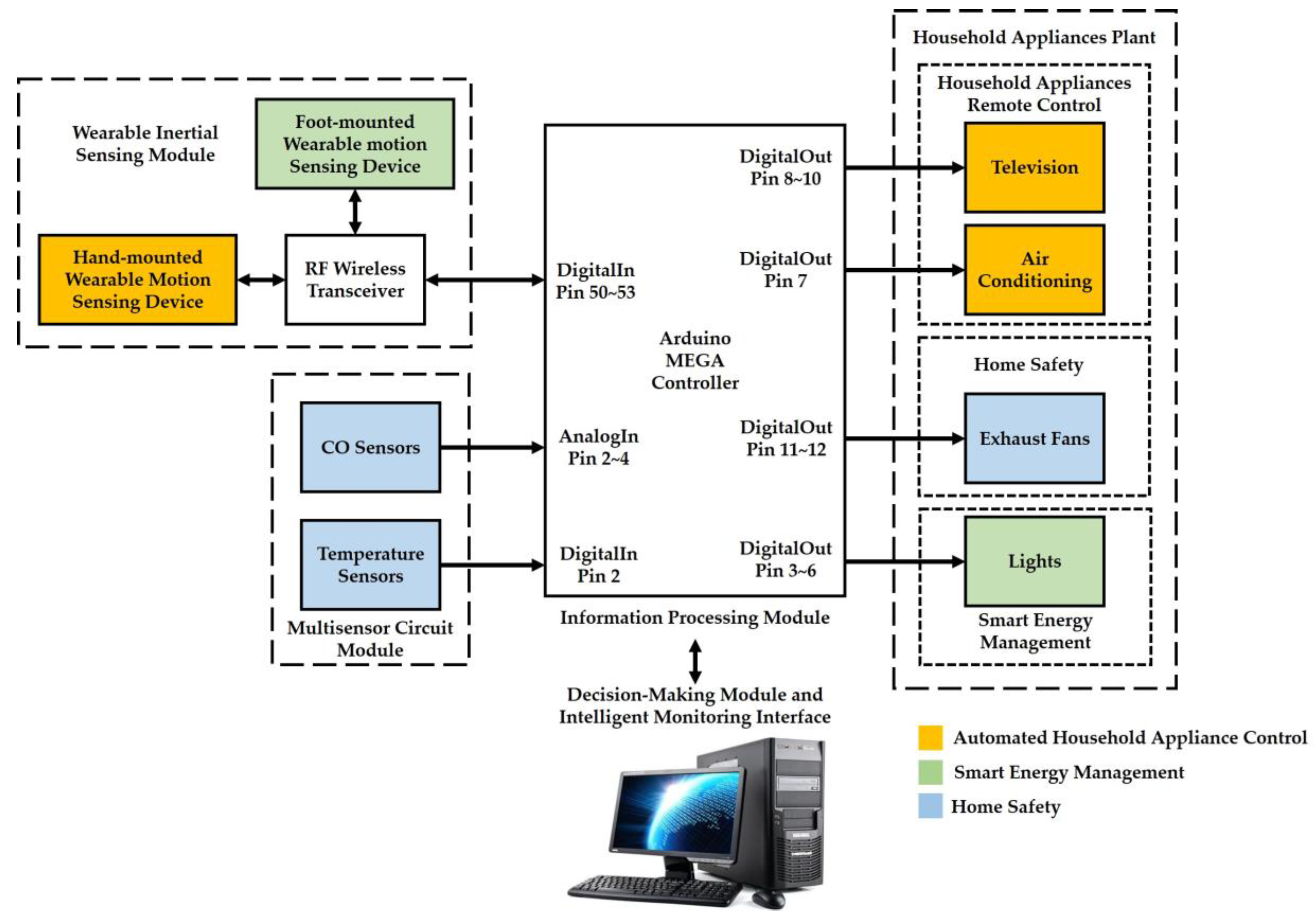
2. Proposed Smart Home System and Architecture
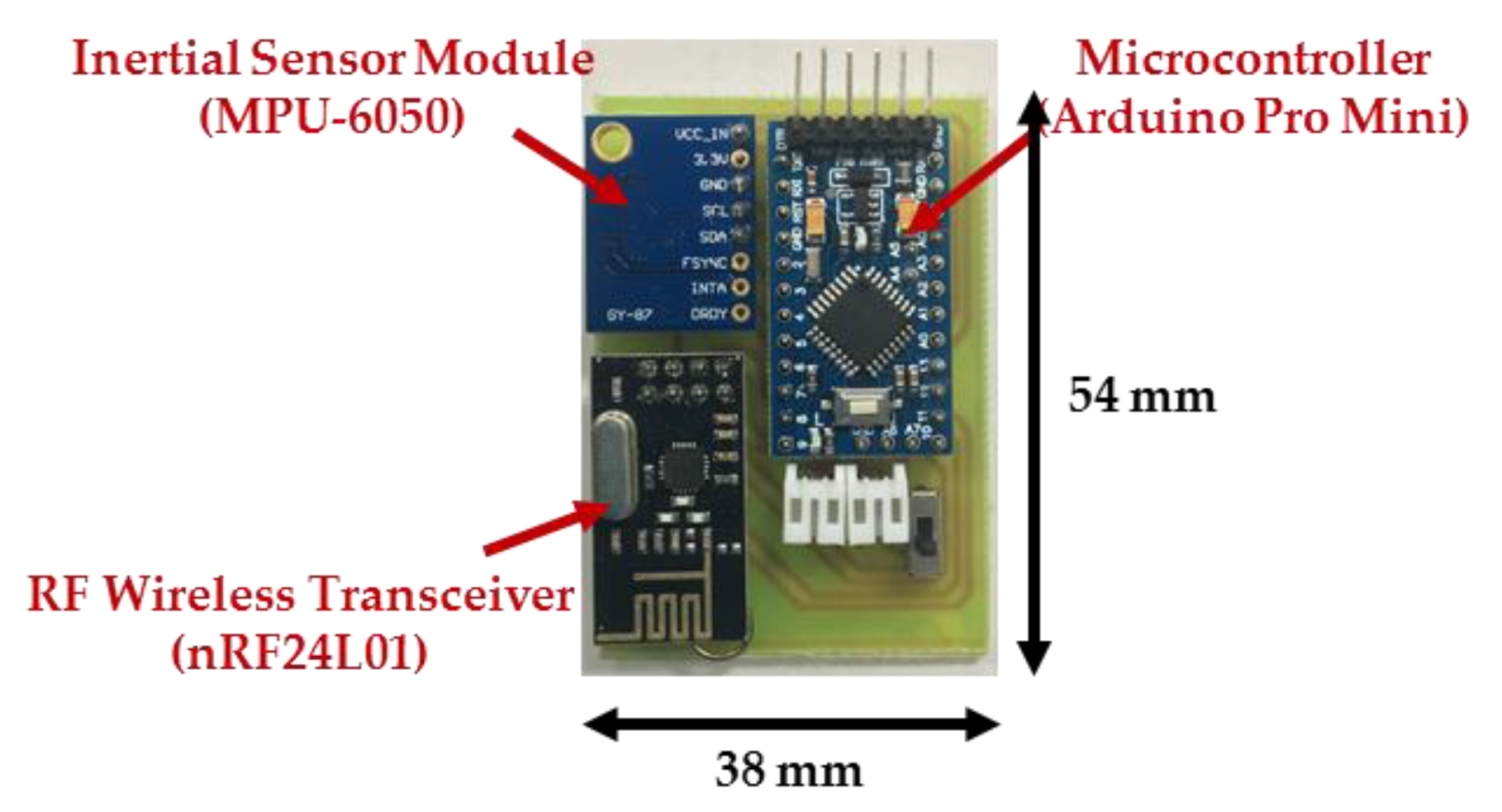
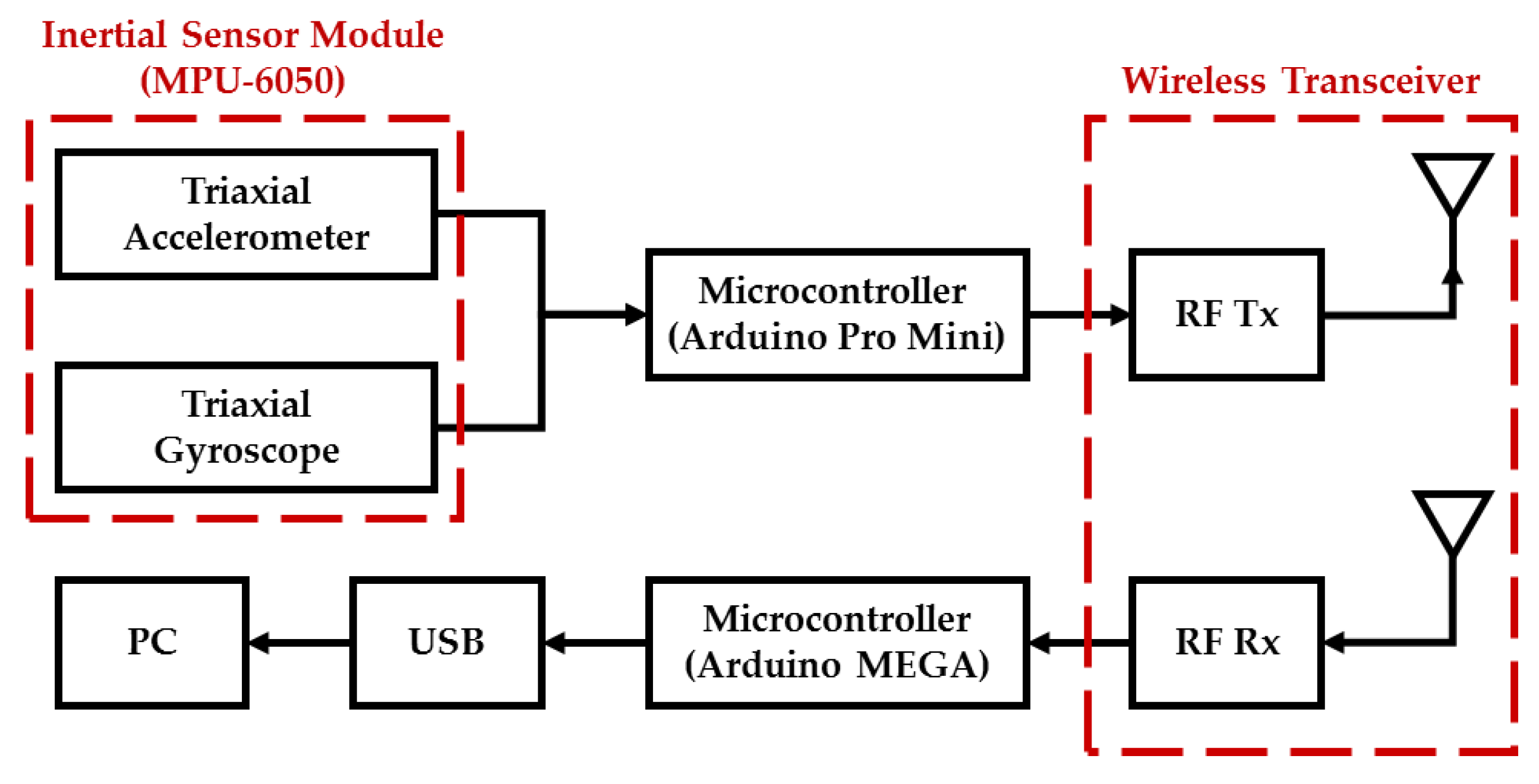
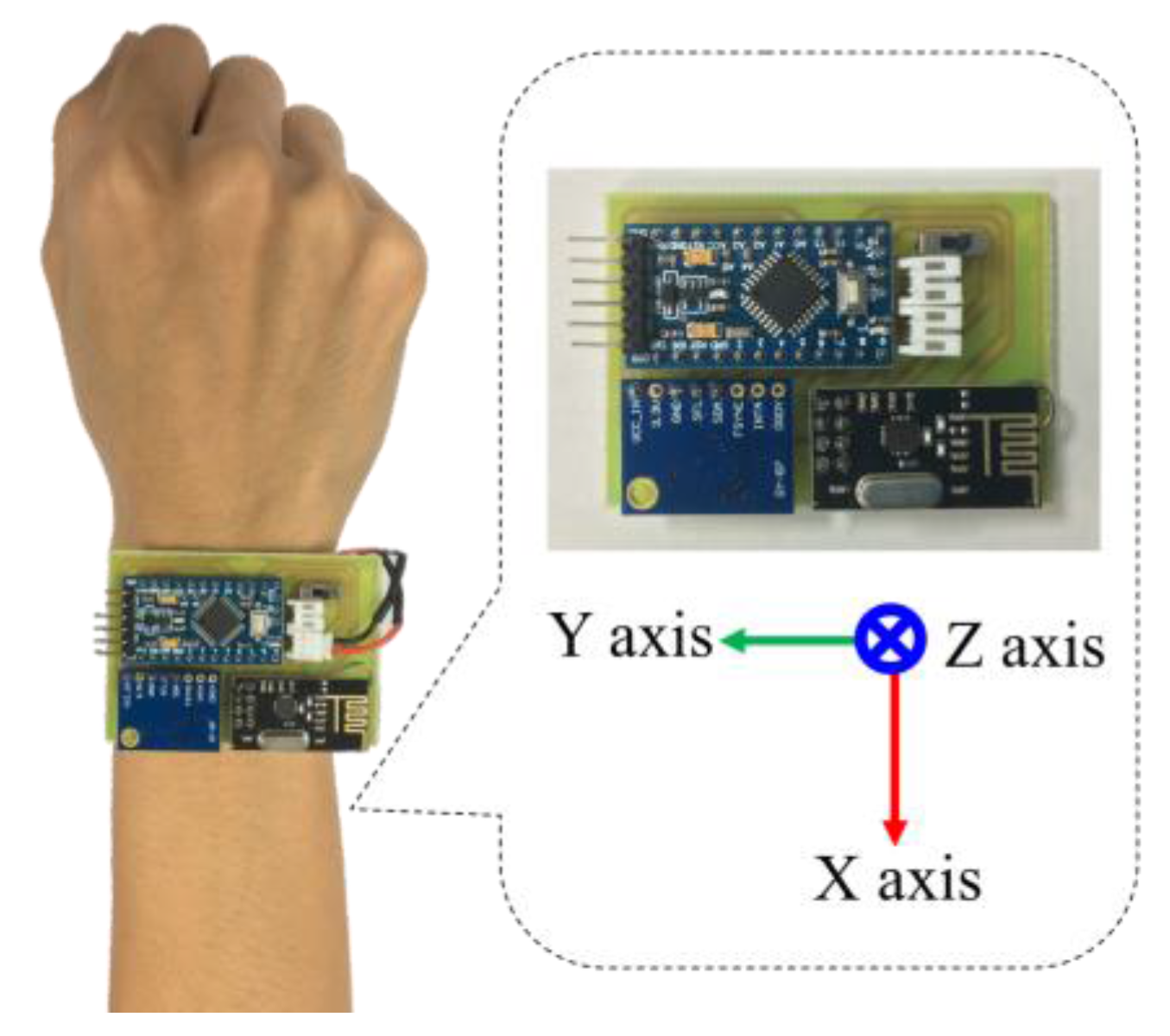
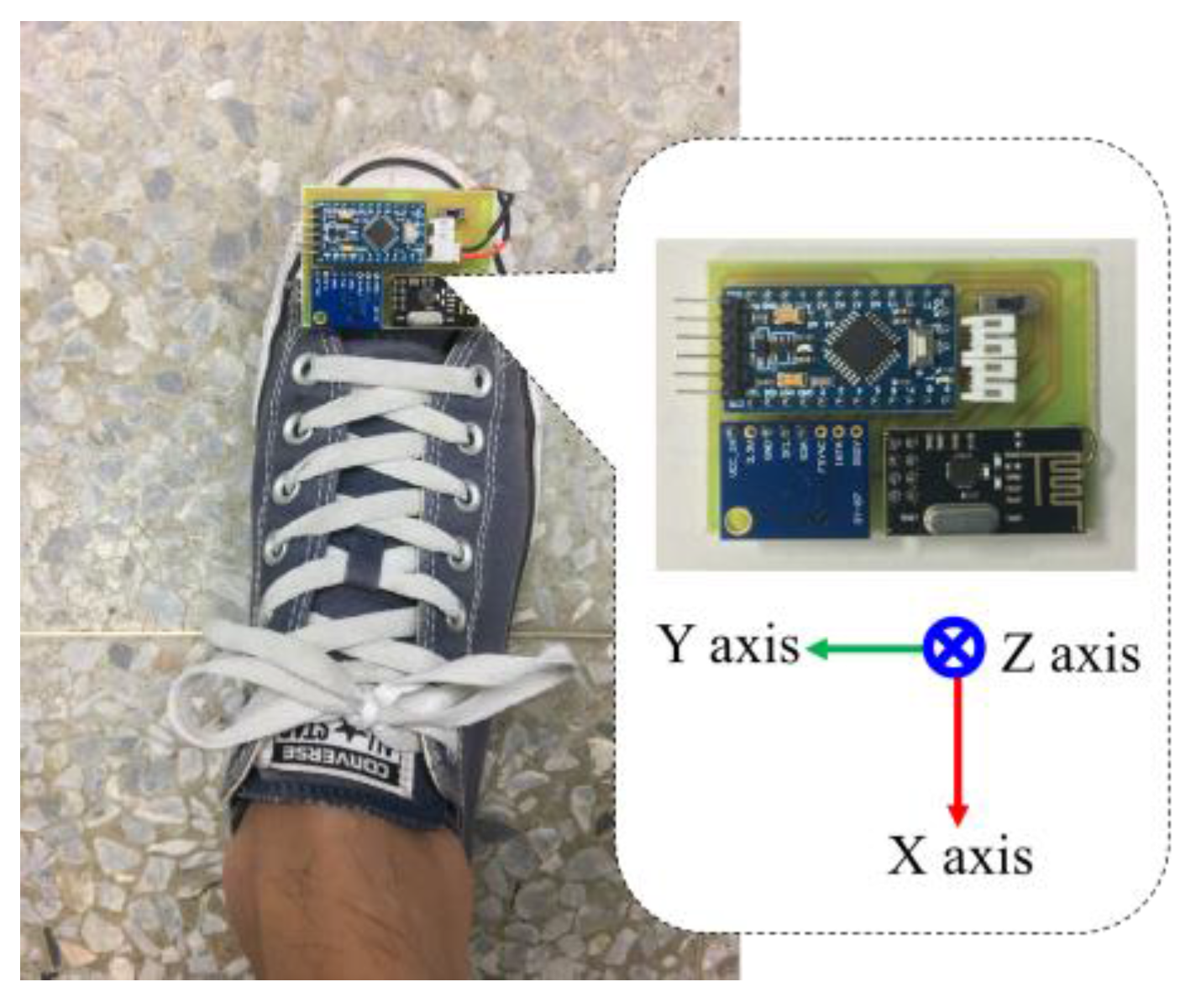
2.1. Wearable Inertial Sensing Module
2.2. Environmental Sensors
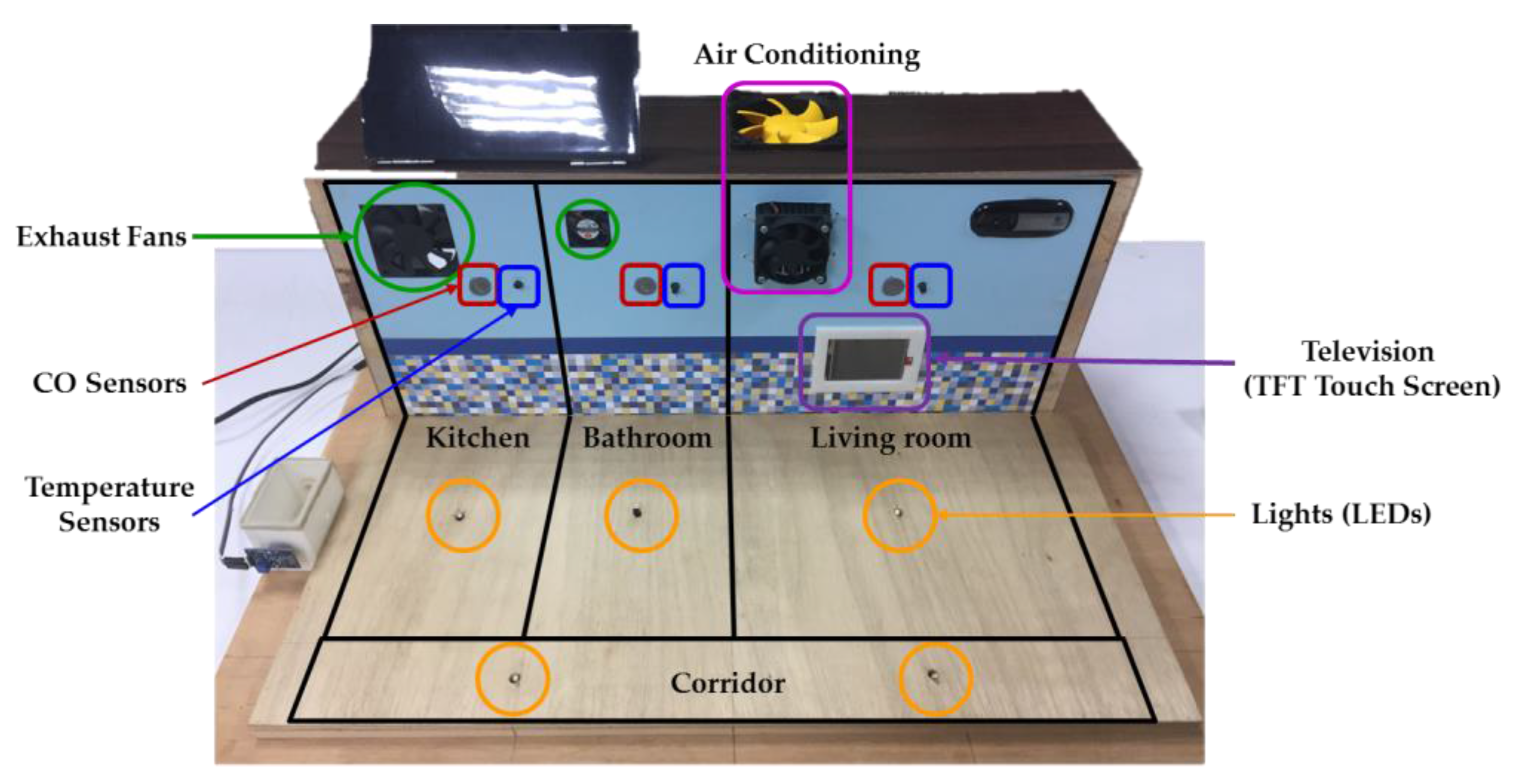
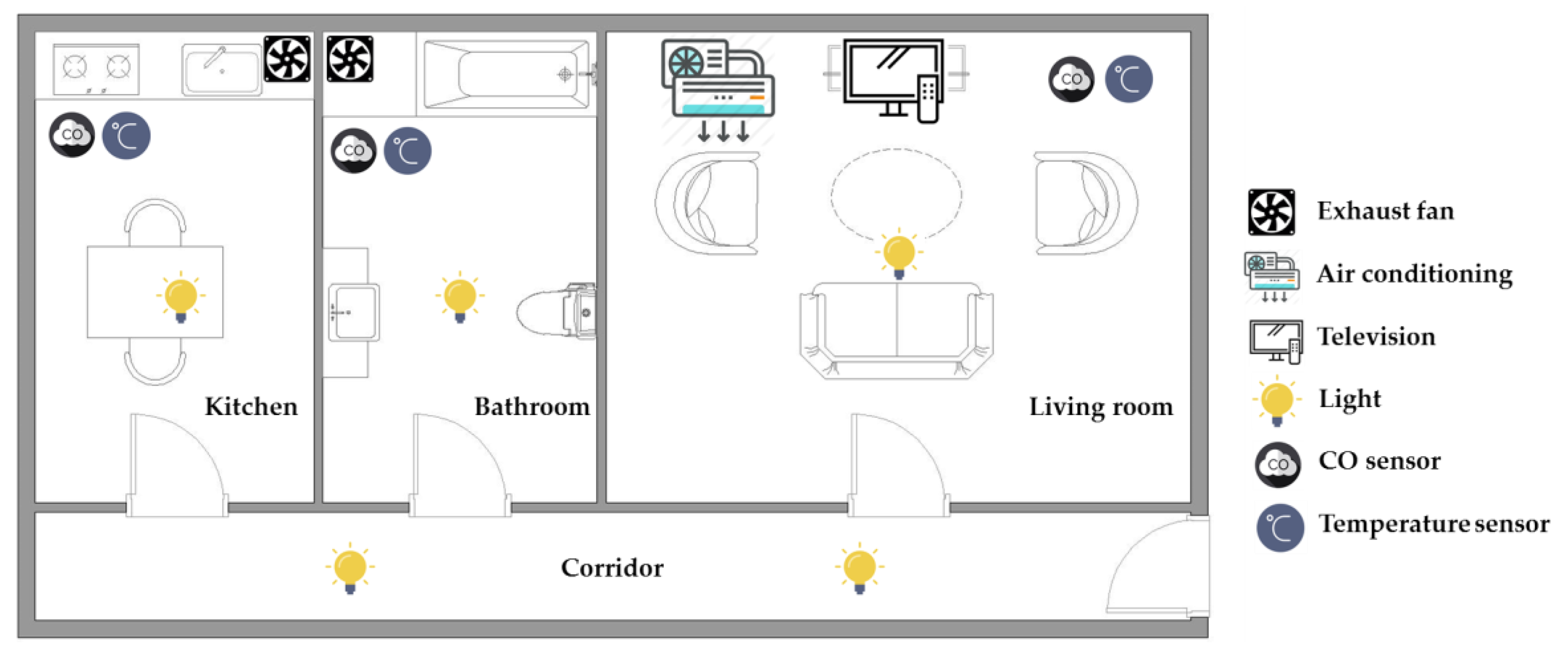
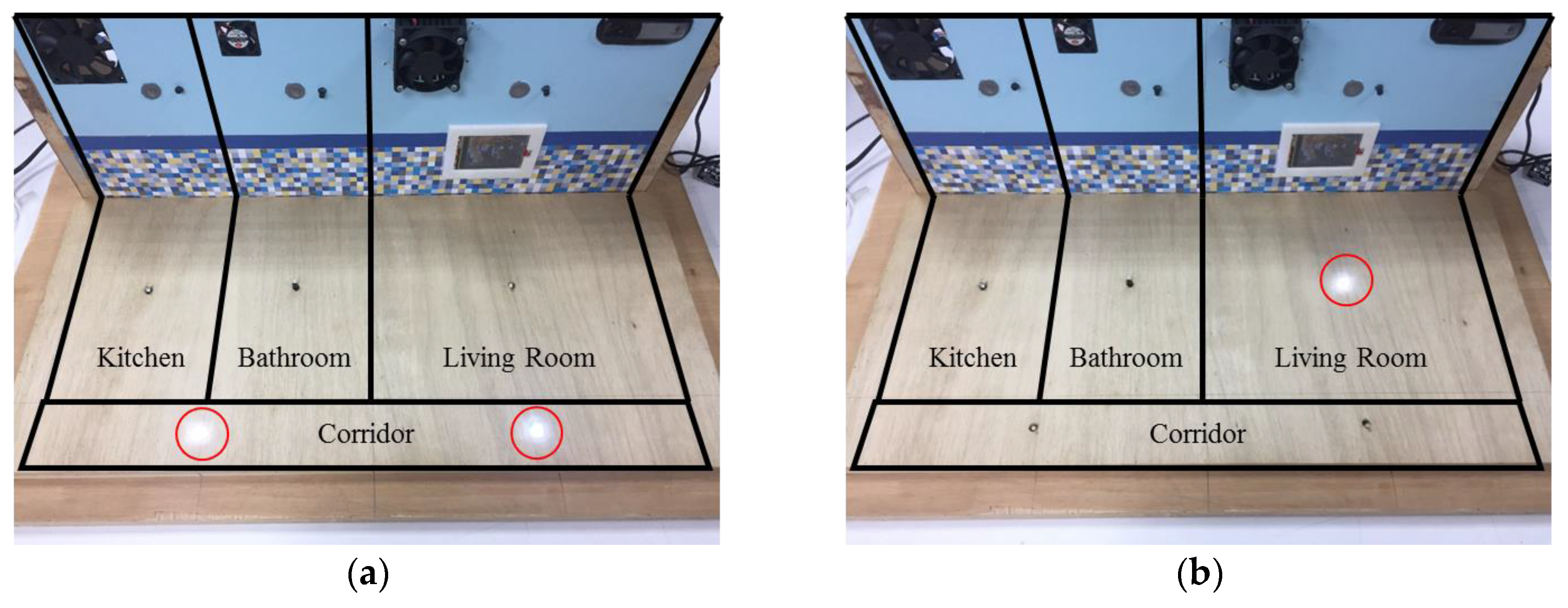
2.3. Experimental Testbed
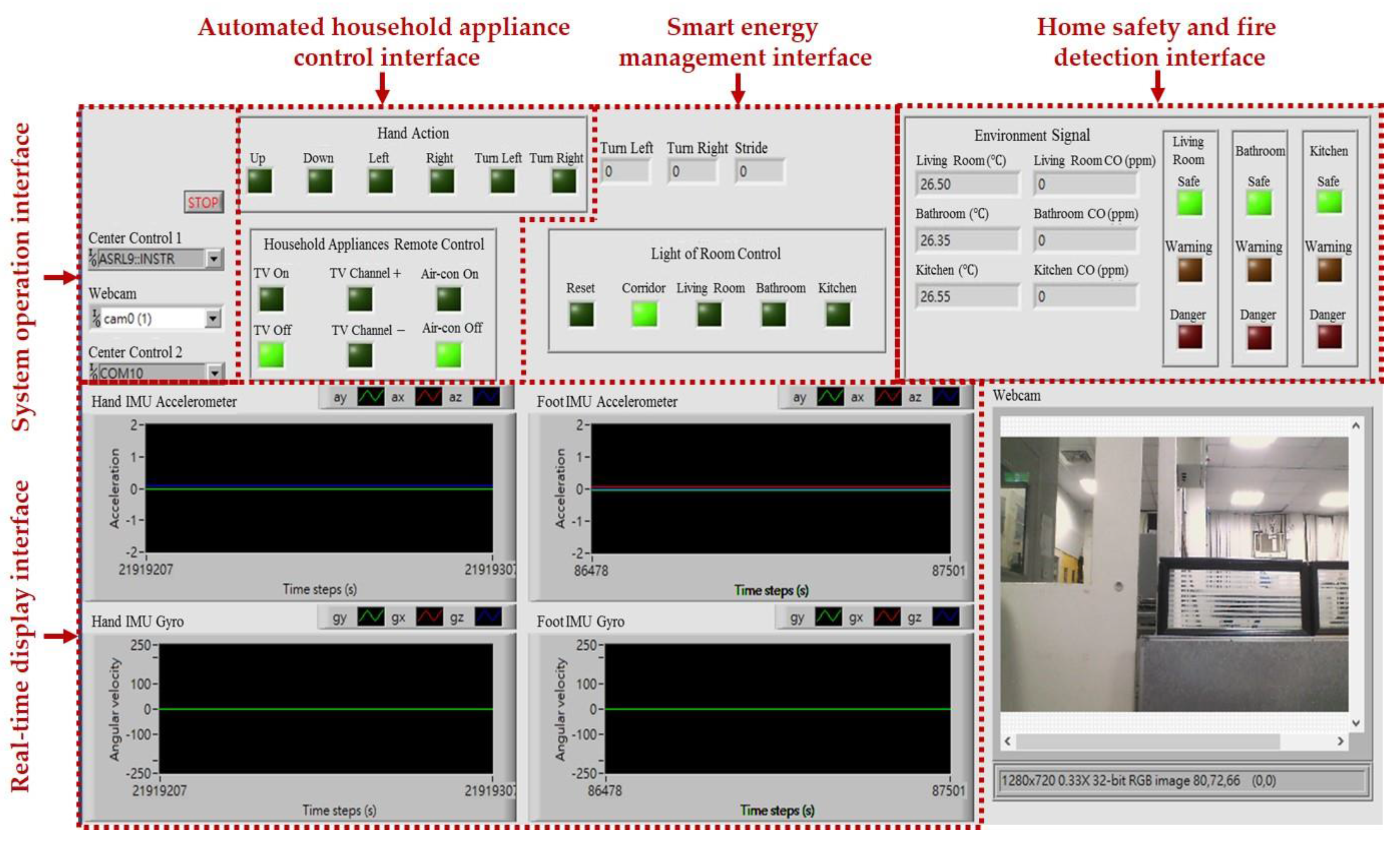
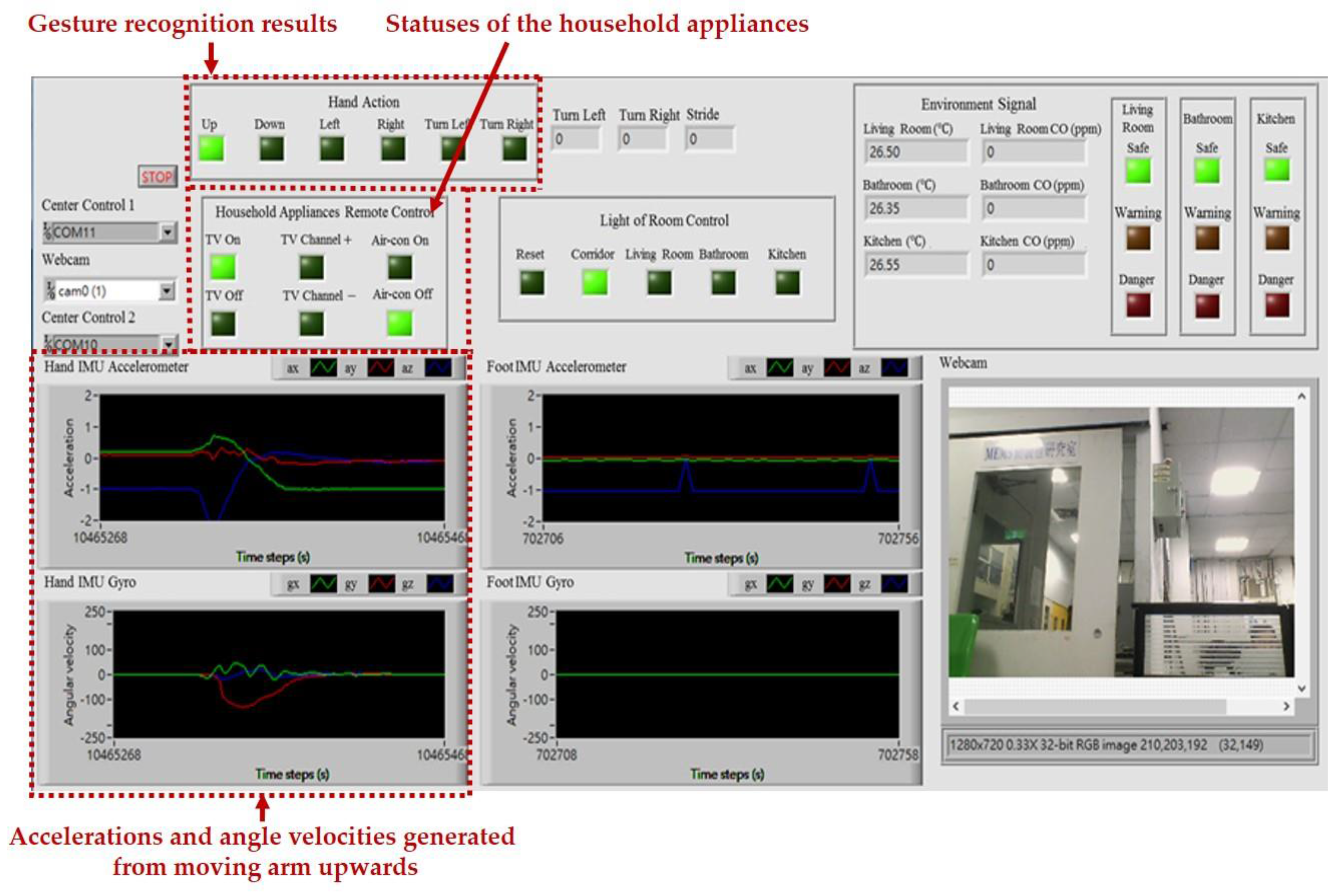
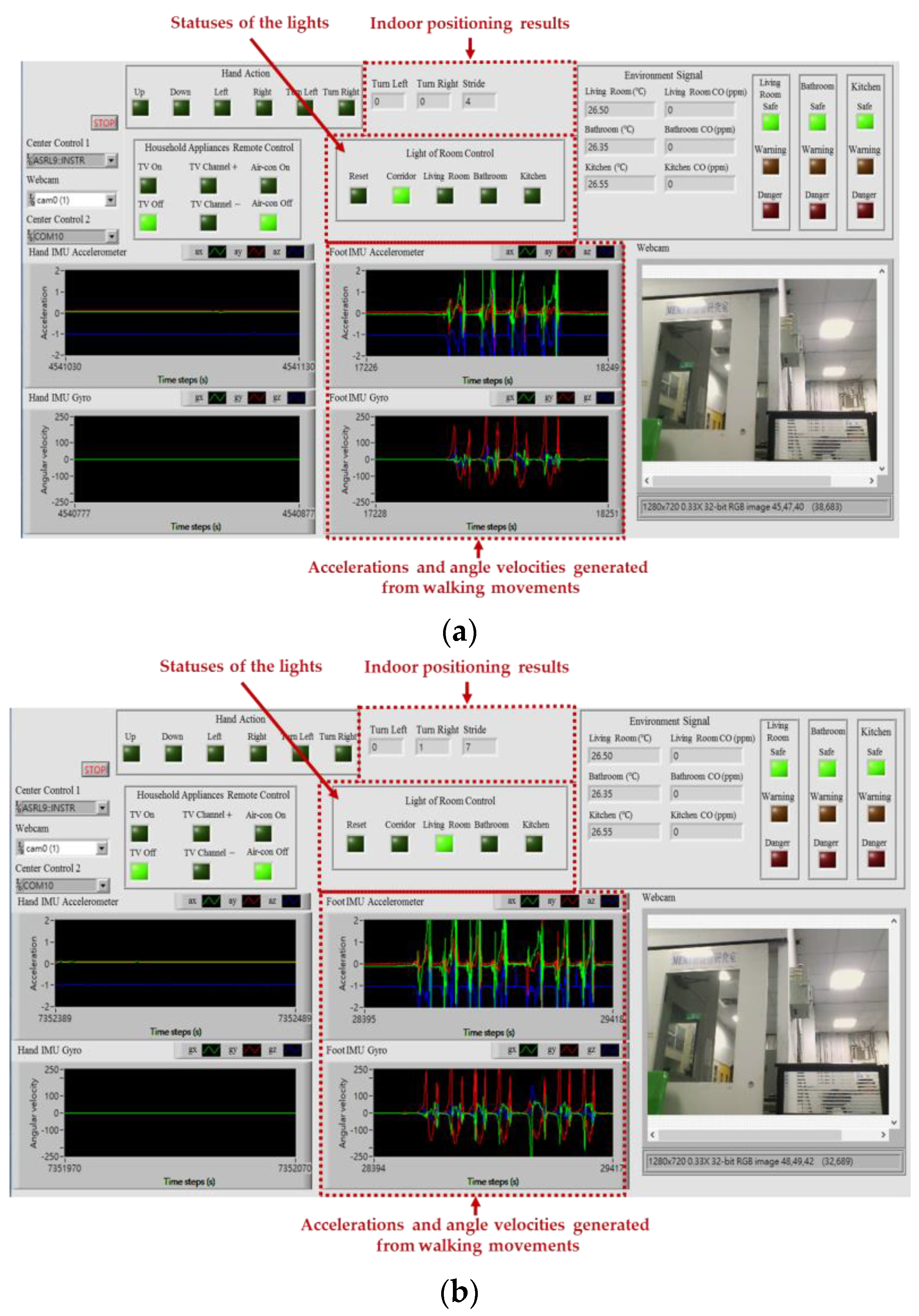
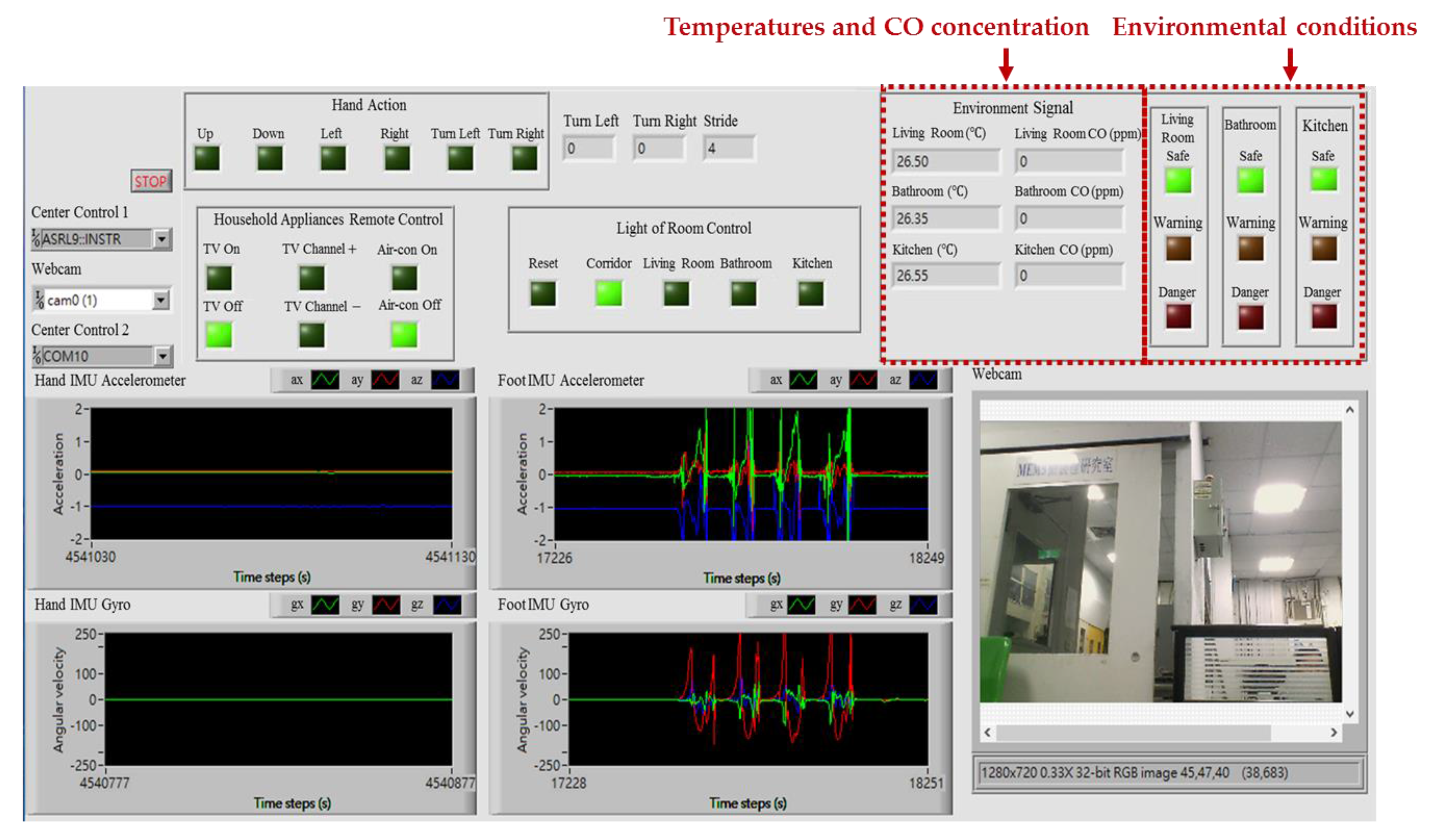
2.4. Intelligent Monitoring Interface
3. Proposed Intelligent Algorithms for the Smart Home
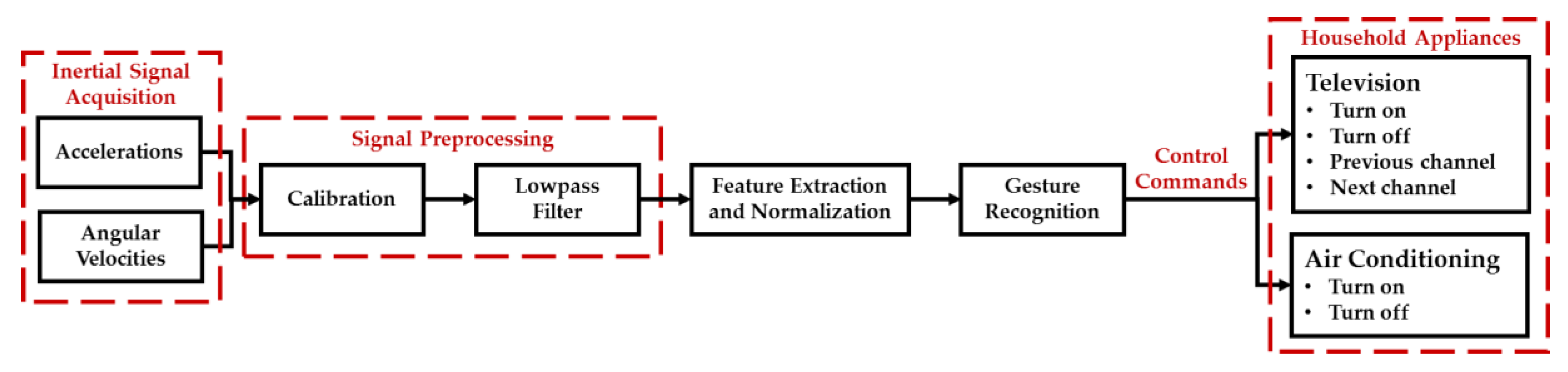
3.1. 3D Gesture Recognition Algorithm for Automated Household Appliance Control
3.1.1. Signal Preprocessing
3.1.2. Feature Extraction and Normalization
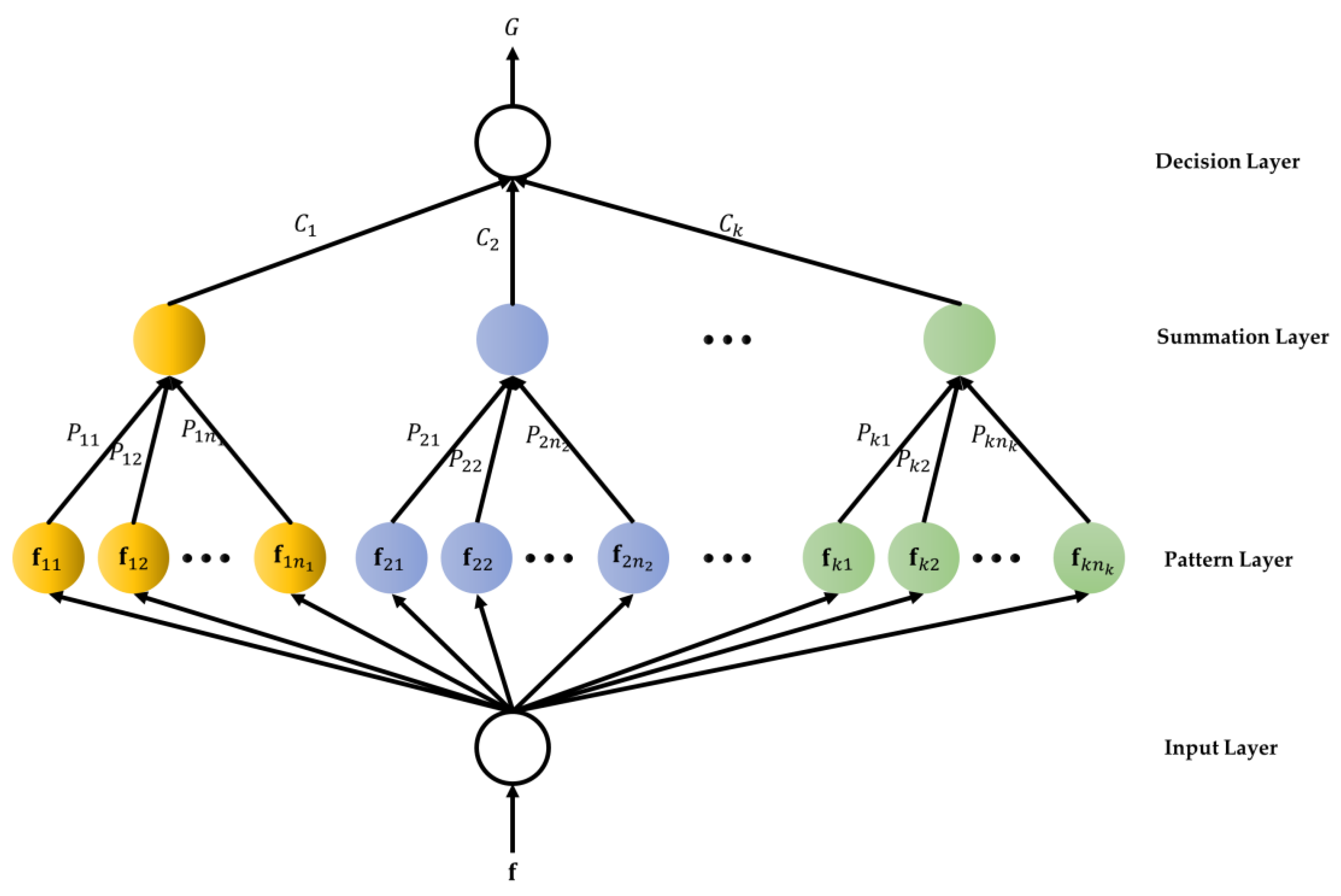
3.1.3. Gesture Recognition
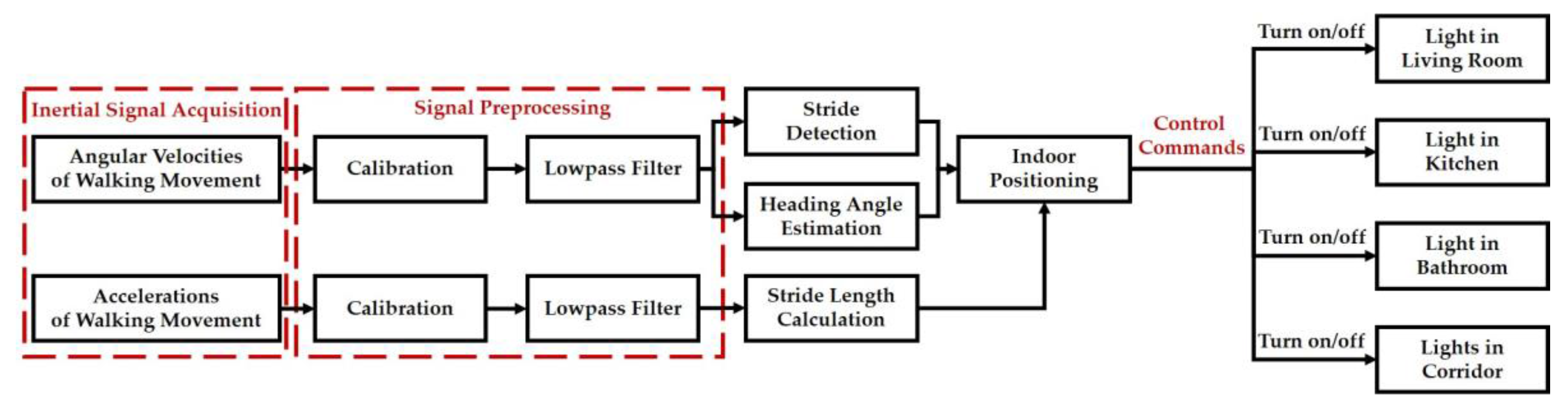
3.2. Indoor Positioning Algorithm for Smart Energy Management
3.2.1. Signal Preprocessing
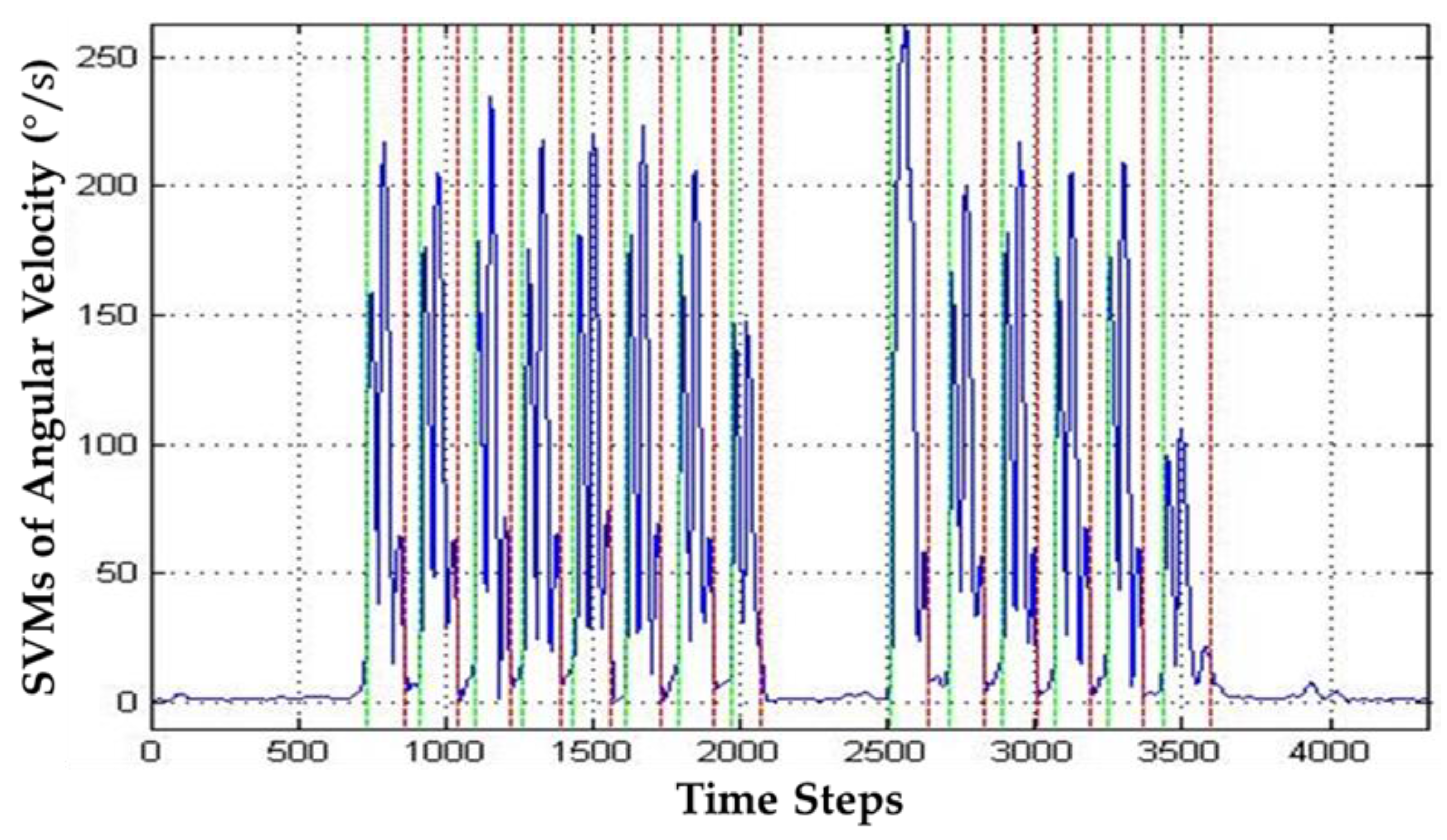
3.2.2. Stride Detection
3.2.3. Heading Angle Estimation
3.2.4. Stride Length Calculation
3.2.5. Indoor Positioning
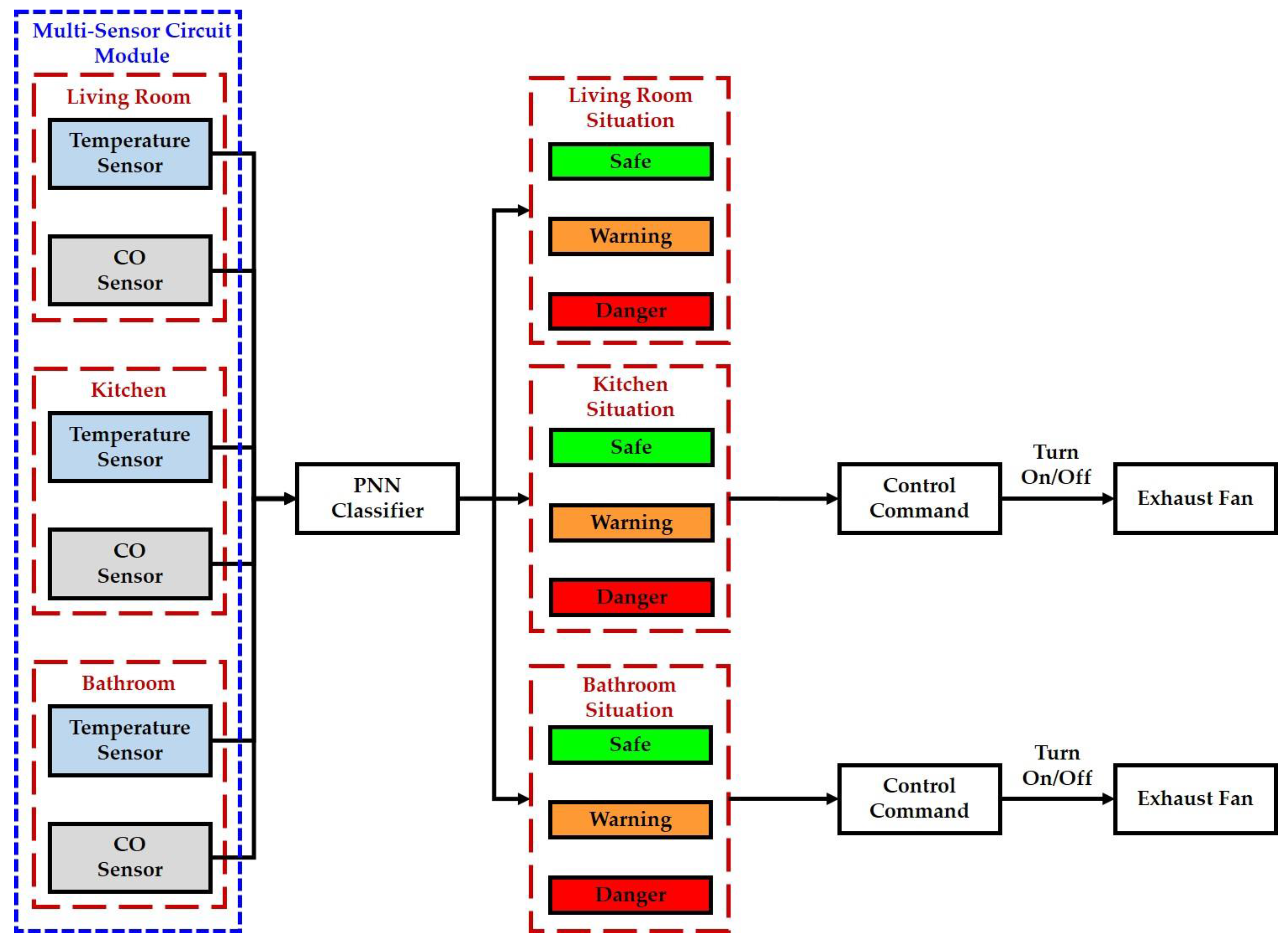
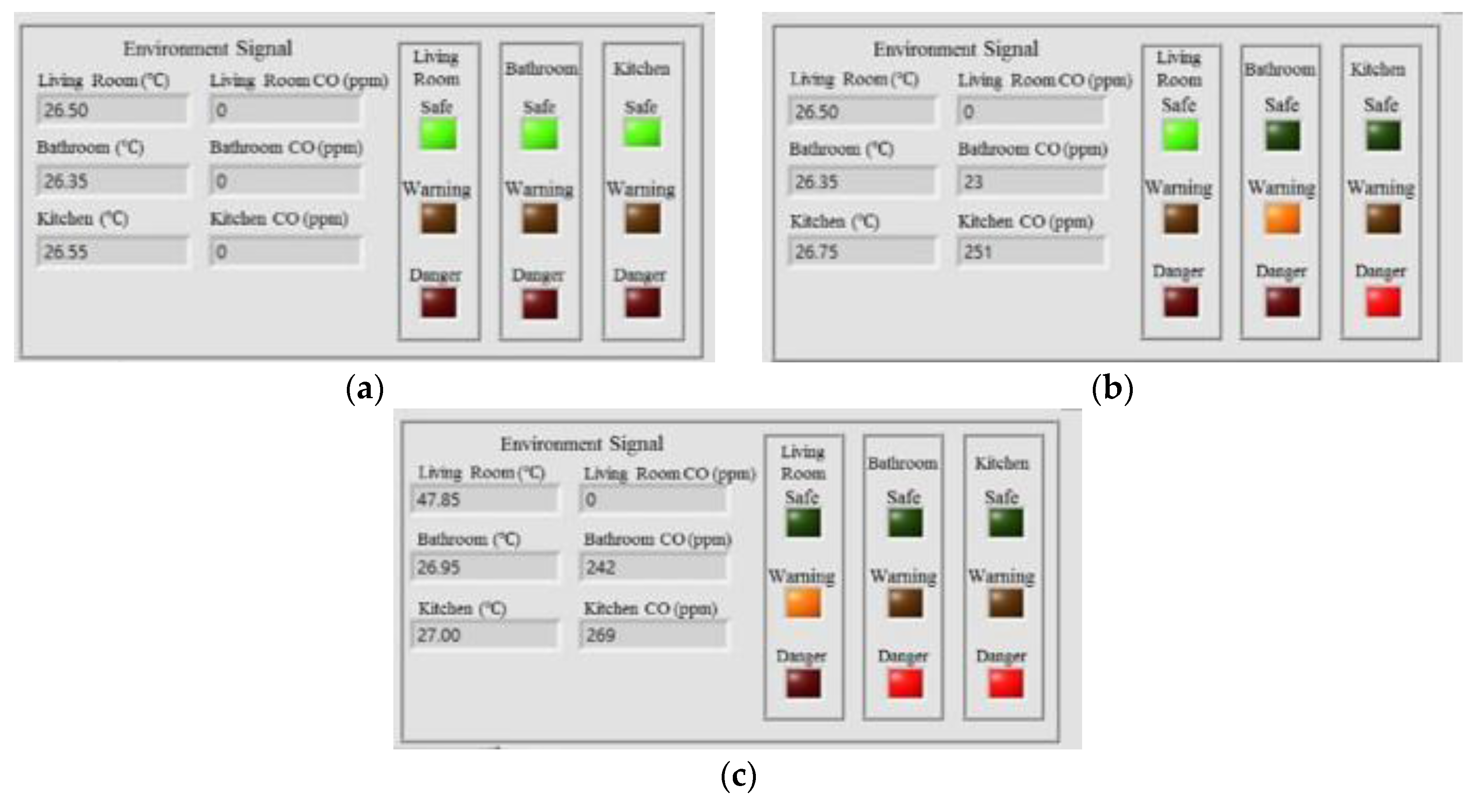
3.3. Intelligent Fire Detection and Alarm Algorithm for Home Safety
4. Results
4.1. Automated Household Appliance Control
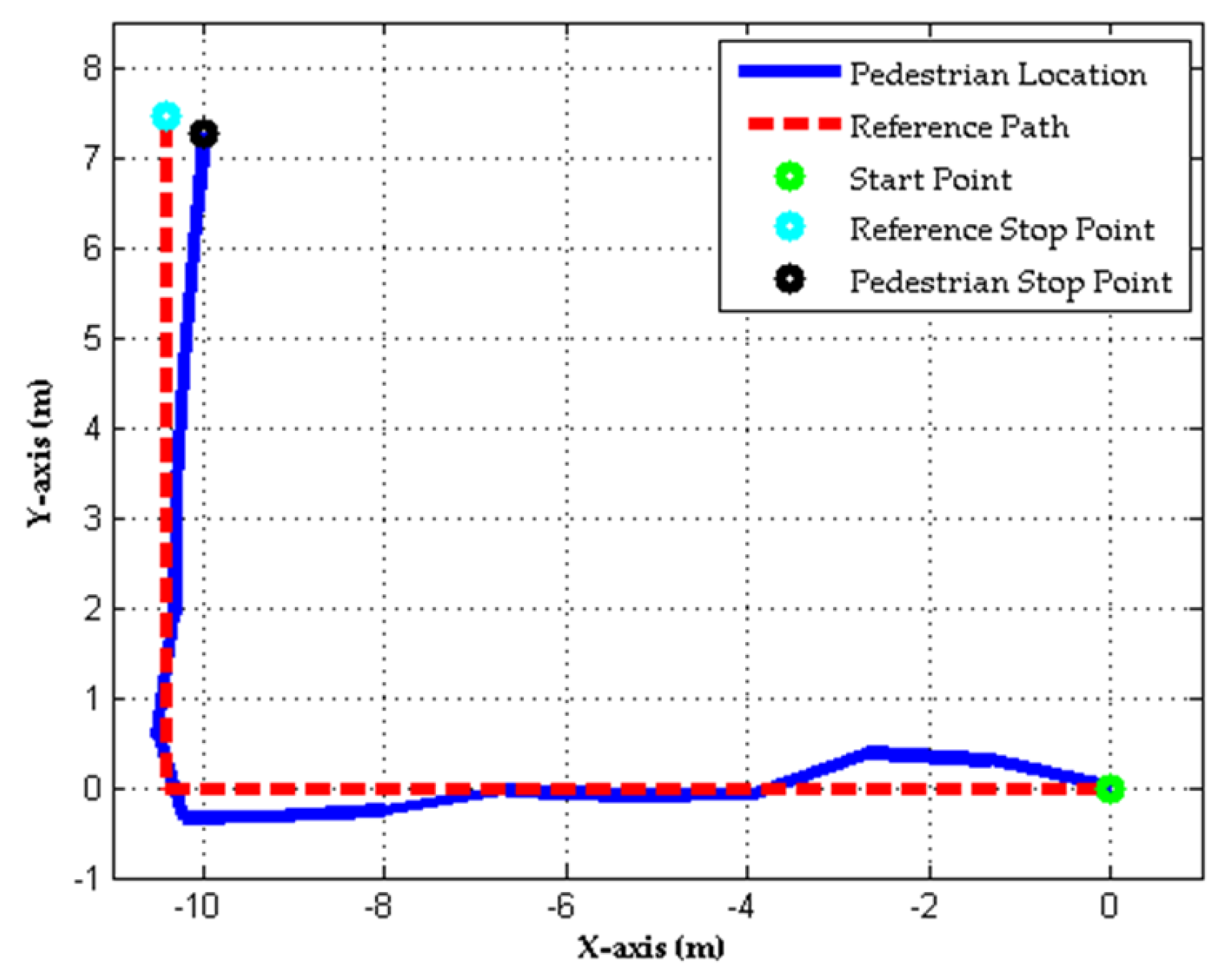
4.2. Indoor Positioning and Smart Energy Management
4.3. Home Safety and Fire Detection
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- World Health Organization. Global Health and Aging. Available online: http://www.who.int/ageing/publications/global_health/en/ (accessed on 25 March 2015).
- World Health Organization. Disability and Rehabilitation. Available online: http://www.who.int/disabilities/en/ (accessed on 25 March 2015).
- Alam, M.R.; Reaz, M.B.I.; Ali, M.A.M. A review of smart homes-Past, present, and future. IEEE Trans. Syst. Man Cybern. Part C 2012, 42, 1190–1203. [Google Scholar] [CrossRef]
- Badii, A.; Huijnen, C.; Heuvel, H.V.D.; Thiemert, D.; Nap, H.H. CompanionAble: An integrated cognitive-assistive smart home and companion robot for proactive lifestyle support. Gerontechnology 2012, 11, 358. [Google Scholar] [CrossRef]
- Macis, S.; Loi, D.; Pani, D.; Rijnen, W.; Raffo, L. A TV-based ICT platform for active ageing, tele-care and social networking. In Proceedings of the 1st International Conference on Information and Communication Technologies for Ageing Well and e-Health (ICT4AgeingWell), Lisbon, Portugal, 20–22 May 2015; pp. 219–227. [Google Scholar]
- Gburzynski, P.; Olesinski, W.; Vooren, J.V. A WSN-based, Rss-driven, real-time location tracking system for independent living facilities. In Proceedings of the 13th International Joint Conference on e-Business and Telecommunications (ICETE), Lisbon, Portugal, 26–28 July 2016; pp. 64–71. [Google Scholar]
- Fernandez-Llatas, C.; Lizondo, A.; Monton, E.; Benedi, J.; Traver, V. Process mining methodology for health process tracking using real-time indoor location systems. Sensors 2015, 15, 29821–29840. [Google Scholar] [CrossRef] [PubMed]
- Stojkoska, B.R.; Trivodaliev, K.; Davcev, D. Internet of things framework for home care systems. Wirel. Commun. Mob. Comput. 2017, 2017, 1–10. [Google Scholar] [CrossRef]
- European Commission. AIOTI Recommendations for Future Collaborative Work in the Context of the Internet of Things Focus Area in Horizon 2020. Available online: https://ec.europa.eu/ digital-single-market/news/aioti-recommendations-future-collaborative-work-context-internet-things-focus-area-horizon-2020 (accessed on 29 April 2016).
- Ding, D.; Cooper, R.A.; Pasquina, P.F.; Pasquina, L.F. Sensor technology for smart homes. Maturitas 2011, 69, 131–136. [Google Scholar] [CrossRef] [PubMed]
- Wang, J.M.; Yang, M.T.; Chen, P.L. Design and implementation of an intelligent windowsill system using smart handheld device and fuzzy microcontroller. Sensors 2017, 17, 830. [Google Scholar] [CrossRef] [PubMed]
- Paola, A.D.; Ortolani, M.; Re, G.L.; Anastasi, G.; Das, S.K. Intelligent management systems for energy efficiency in buildings: A survey. ACM Comput. Surv. 2014, 47, 1–38. [Google Scholar] [CrossRef]
- Lian, S.; Hu, W.; Wang, K. Automatic user state recognition for hand gesture based low-cost television control system. IEEE Trans. Consum. Electron. 2014, 60, 107–115. [Google Scholar] [CrossRef]
- Jing, L.; Zhou, Y.; Cheng, Z.; Huang, T. Magic rings: A finger-worn device for multiple appliances control using static finger gestures. Sensors 2012, 12, 5775–5790. [Google Scholar] [CrossRef] [PubMed]
- Lee, H.; Wu, C.; Aghajan, H. Vision-based user-centric light control for smart environments. Pervasive Mob. Comput. 2011, 7, 223–240. [Google Scholar] [CrossRef]
- Gupta, H.P.; Chudgar, H.S.; Mukherjee, S.; Dutta, T.; Sharma, K. A continuous hand gestures recognition technique for human-machine interaction using accelerometer and gyroscope sensors. IEEE Sens. J. 2016, 16, 6425–6432. [Google Scholar] [CrossRef]
- Xie, R.; Cao, J. Accelerometer-based hand gesture recognition by neural network and similarity matching. IEEE Sens. J. 2016, 11, 4537–4545. [Google Scholar] [CrossRef]
- Bataineh, S.; Bahillo, A.; Diez, L.E.; Onieva, E.; Bataineh, I. Conditional random field-based offline map matching for indoor environments. Sensors 2016, 16, 1302. [Google Scholar] [CrossRef] [PubMed]
- Deng, Z.A.; Wang, G.; Hu, Y.; Cui, Y. Carrying position independent user heading estimation for indoor pedestrian navigation with smartphones. Sensors 2016, 16, 677. [Google Scholar] [CrossRef] [PubMed]
- Zhang, H.; Yuan, W.; Shen, Q.; Li, T.; Chang, H. A handheld inertial pedestrian navigation system with accurate step modes and device poses recognition. IEEE Sens. J. 2015, 15, 1421–1429. [Google Scholar] [CrossRef]
- Hsu, Y.L.; Chu, C.L.; Tsai, Y.J.; Wang, J.S. An inertial pen with dynamic time warping recognizer for handwriting and gesture recognition. IEEE Sens. J. 2015, 15, 154–163. [Google Scholar]
- Wang, J.S.; Chuang, F.C. An accelerometer-based digital pen with a trajectory recognition algorithm for handwritten digit and gesture recognition. IEEE Trans. Ind. Electron. 2012, 59, 2998–3007. [Google Scholar] [CrossRef]
- Hong, F.; You, S.; Wei, M.; Zhang, Y.; Guo, Z. MGRA: Motion gesture recognition via accelerometer. Sensors 2016, 16, 530. [Google Scholar] [CrossRef] [PubMed]
- Li, X.; Wang, J.; Liu, C. A bluetooth/PDR integration algorithm for an indoor positioning system. Sensors 2015, 15, 24862–24885. [Google Scholar] [CrossRef] [PubMed]
- Tian, Q.; Salcic, Z.; Wang, K.I.K.; Pan, Y. A multi-mode dead reckoning system for pedestrian tracking using smartphones. IEEE Sens. J. 2016, 16, 2079–2093. [Google Scholar] [CrossRef]
- Ren, M.; Pan, K.; Liu, Y.; Guo, H.; Zhang, X.; Wang, P. A novel pedestrian navigation algorithm for a foot-mounted inertial-sensor-based system. Sensors 2016, 16, 139. [Google Scholar] [CrossRef] [PubMed]
- Hsu, Y.L.; Wang, J.S.; Chang, C.W. A wearable inertial pedestrian navigation system with quaternion-based extended Kalman filter for pedestrian localization. IEEE Sens. J. 2017, 17, 3193–3206. [Google Scholar] [CrossRef]
- Rose-Pehrsson, S.L.; Hart, S.J.; Street, T.T.; Williams, F.W.; Hammond, M.H.; Gottuk, M.T.; Wright, M.T.; Wong, J.T. Early warning fire detection system using a probabilistic neural network. Fire Technol. 2003, 39, 147–171. [Google Scholar] [CrossRef]
- Derbel, F. Performance improvement of fire detectors by means of gas sensors and neural networks. Fire Saf. J. 2004, 39, 383–398. [Google Scholar] [CrossRef]
- Lee, K.C.; Lee, H.H. Network-based fire-detection system via controller area network for smart home automation. IEEE Trans. Consum. Electron. 2004, 50, 1093–1100. [Google Scholar]
- Andrew, A.M.; Zakariz, A.; Saad, S.M.; Shakaff, A.Y.M. Multi-stage feature selection based intelligent classifier for classification of incipient stage fire in building. Sensors 2016, 16, 31. [Google Scholar] [CrossRef] [PubMed]
- Luis, J.A.; Galan, J.A.G.; Espigado, J.A. Low power wireless smoke alarm system in home fires. Sensors 2015, 15, 20717–20729. [Google Scholar] [CrossRef] [PubMed]
- Wang, J.S.; Hsu, Y.L.; Liu, J.N. An inertial-measurement-unit-based pen with a trajectory reconstruction algorithm and its applications. IEEE Trans. Ind. Electron. 2010, 57, 3508–3521. [Google Scholar] [CrossRef]
- Chang, H.C.; Hsu, Y.L.; Yang, S.C.; Lin, J.C.; Wu, Z.H. A wearable inertial measurements system with complementary filter for gait analysis of patients with stroke or Parkinson’s disease. IEEE Access 2016, 4, 8442–8453. [Google Scholar] [CrossRef]
- Wang, J.S.; Chiang, W.C.; Hsu, Y.L.; Yang, Y.T. ECG arrhythmia classification using a probabilistic neural network with a feature reduction method. Neurocomputing 2013, 116, 38–45. [Google Scholar] [CrossRef]
- Wang, Y.; Li, L.; Ni, J.; Huang, S. Feature selection using tabu search with long-term memories and probabilistic neural networks. Pattern Recogn. Lett. 2009, 30, 661–670. [Google Scholar] [CrossRef]
- Hsu, Y.L.; Chung, P.C.; Wang, W.H.; Pai, M.C.; Wang, C.Y.; Lin, C.W.; Wu, H.L.; Wang, J.S. Gait and balance analysis for patients with Alzheimer’s disease using an inertial-sensor-based wearable instrument. IEEE J. Biomed. Health Inf. 2014, 18, 1822–1830. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Z.Q.; Meng, X. Use of an inertial/magnetic sensor module for pedestrian tracking during normal walking. IEEE Trans. Instrum. Meas. 2015, 64, 776–783. [Google Scholar] [CrossRef]






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Gesture | Description | Referents |
|---|---|---|
| Swing upwards | Move arm upwards | Turn on TV |
| Swing downwards | Move arm downwards | Turn off TV |
| Swing right | Move from left to right | Next channel |
| Swing left | Move from right to left | Previous channel |
| Circle | Draw clockwise circle | Turn on air conditioning |
| Anti-circle | Draw counter-clockwise circle | Turn off air conditioning |
| Method | Swing Upwards | Swing Downwards | Swing Right | Swing Left | Circle | Anti-Circle |
|---|---|---|---|---|---|---|
| Swing upwards | 87 | 1 | 3 | 2 | 4 | 3 |
| Swing downwards | 0 | 91 | 4 | 1 | 2 | 2 |
| Swing right | 6 | 5 | 86 | 3 | 0 | 0 |
| Swing left | 4 | 7 | 8 | 80 | 0 | 1 |
| Circle | 1 | 5 | 0 | 0 | 94 | 0 |
| Anti-circle | 1 | 10 | 1 | 0 | 0 | 88 |
| Method | 2-Fold | 5-Fold | 10-Fold | Leave-One-Subject-Out |
|---|---|---|---|---|
| Recognition Rate | 92.0% | 94.8% | 95.3% | 87.7% |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hsu, Y.-L.; Chou, P.-H.; Chang, H.-C.; Lin, S.-L.; Yang, S.-C.; Su, H.-Y.; Chang, C.-C.; Cheng, Y.-S.; Kuo, Y.-C. Design and Implementation of a Smart Home System Using Multisensor Data Fusion Technology. Sensors 2017, 17, 1631. https://doi.org/10.3390/s17071631
Hsu Y-L, Chou P-H, Chang H-C, Lin S-L, Yang S-C, Su H-Y, Chang C-C, Cheng Y-S, Kuo Y-C. Design and Implementation of a Smart Home System Using Multisensor Data Fusion Technology. Sensors. 2017; 17(7):1631. https://doi.org/10.3390/s17071631
Chicago/Turabian StyleHsu, Yu-Liang, Po-Huan Chou, Hsing-Cheng Chang, Shyan-Lung Lin, Shih-Chin Yang, Heng-Yi Su, Chih-Chien Chang, Yuan-Sheng Cheng, and Yu-Chen Kuo. 2017. "Design and Implementation of a Smart Home System Using Multisensor Data Fusion Technology" Sensors 17, no. 7: 1631. https://doi.org/10.3390/s17071631