
Cooperative Position Aware Mobility Pattern of AUVs for Avoiding Void Zones in Underwater WSNs

 , , , ,
, , , ,
Abstract
:1. Introduction
2. Related Work
2.1. Protocols for Position Uncertainty
2.2. Mobility Focused Protocols
2.3. Cooperative Routing Protocols
3. Proposed Schemes
3.1. Position-Aware Mobility Pattern
Position Extrapolation
- Neighboring gliders are too close
- Gliders head towards each other
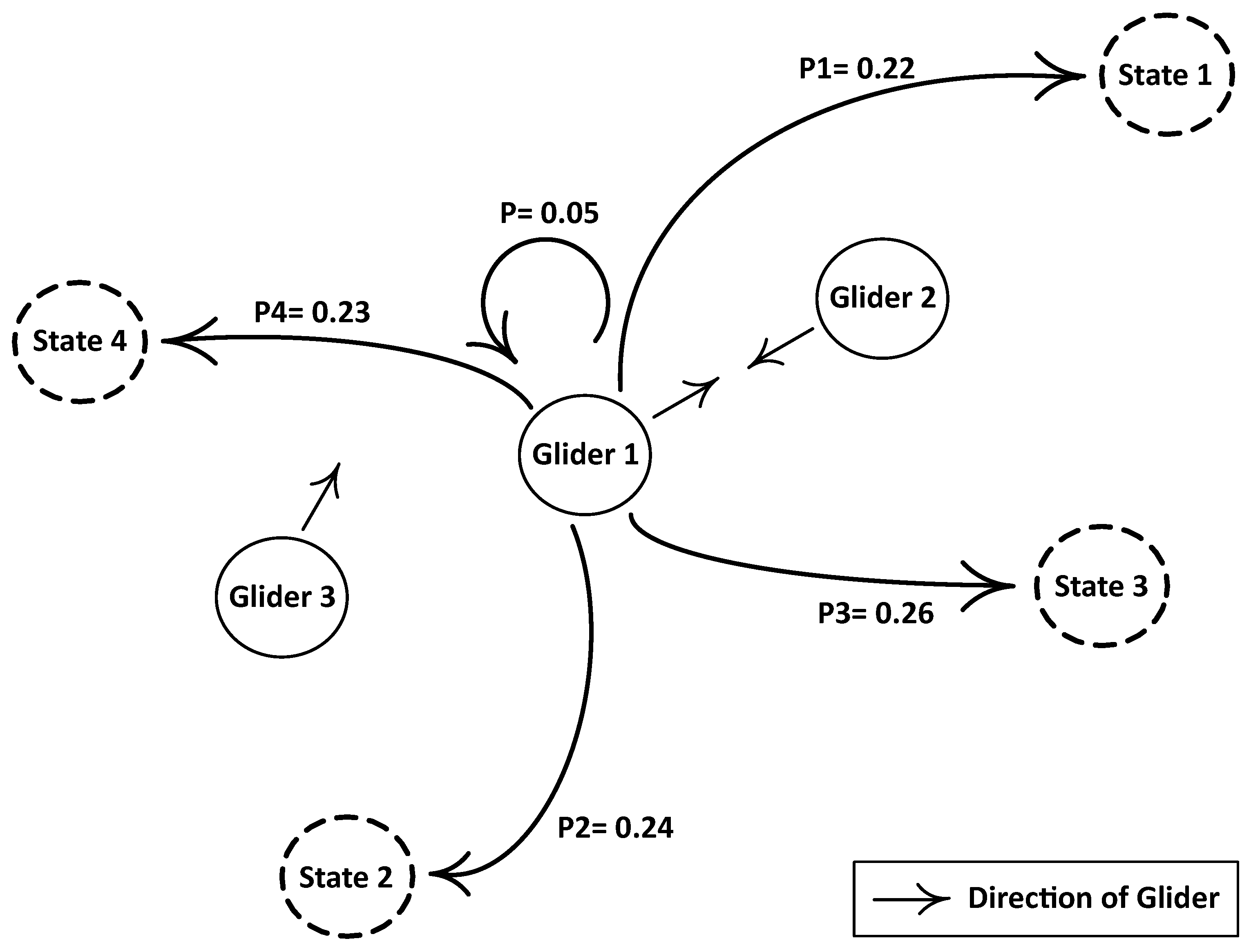
- Neighboring gliders are too close: Figure 3 shows that Gliders 1, 2 and 3 are too close to each other; as a result, they create an excess zone. Basically, the ‘excess zone’ is an area of the network in which an extra number of sensing nodes or gliders is present as compared to the appropriate number of nodes to fully cover that area.Let us suppose that Gliders 1, 2 and 3 are at sojourn positions. Due to the exchange of the control packet, they came to know that they are in the excess zone; then, a glider is randomly selected from the excess zone, and it estimates its future position using the Markov process on the basis of control information shared by its neighbors. Before the lapse of the ‘stay time’ (ST), the predicted direction of a selected glider is shared with the neighbors. The ST is calculated as given below:where is the distance between the sending and the receiving glider and shows the time required for receiving data over . is computed according to Equation (16).denotes the number of gliders involved in data communication, and one is subtracted because the destination will be excluded and rest of the gliders take part in the data transmission.
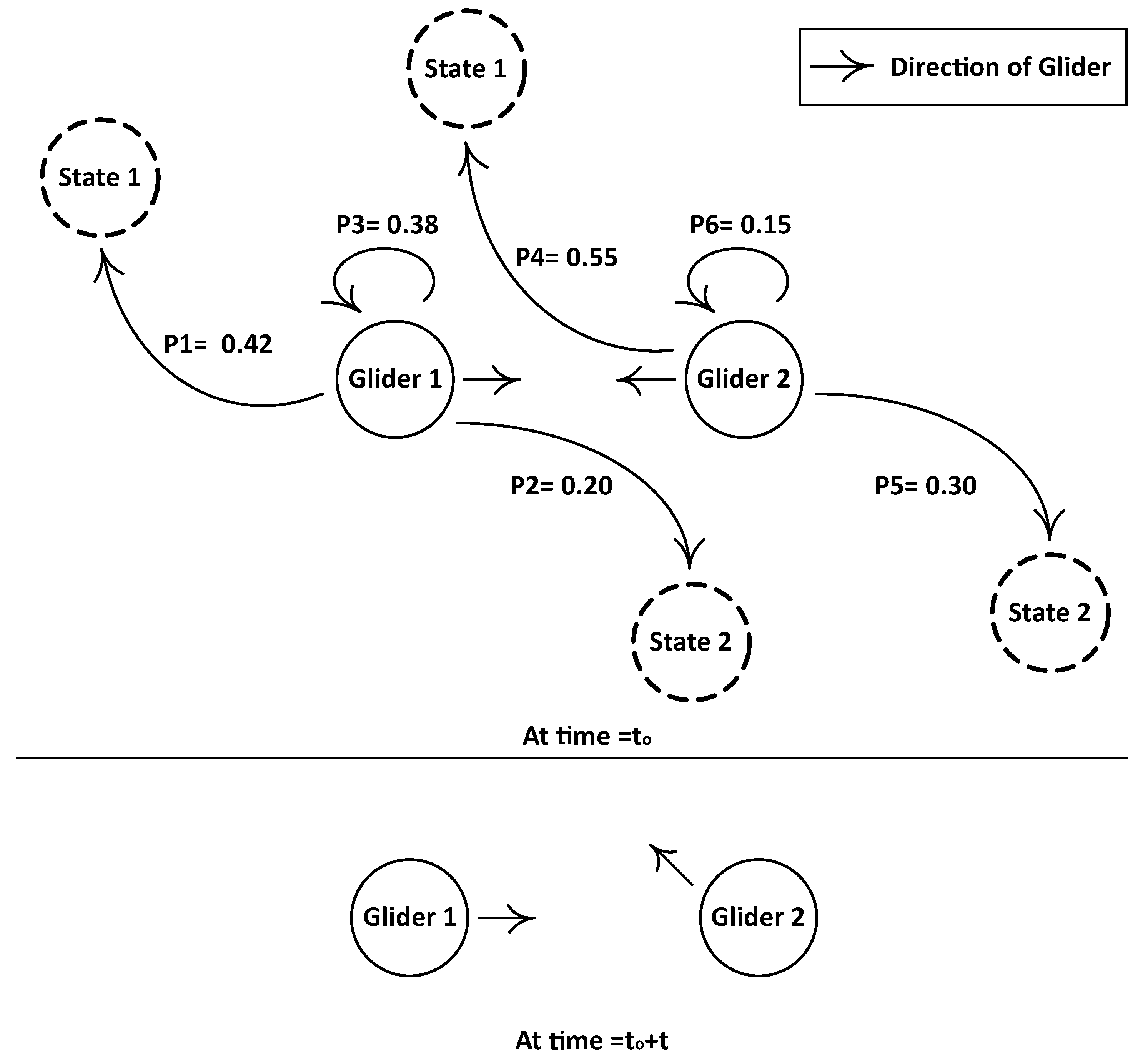
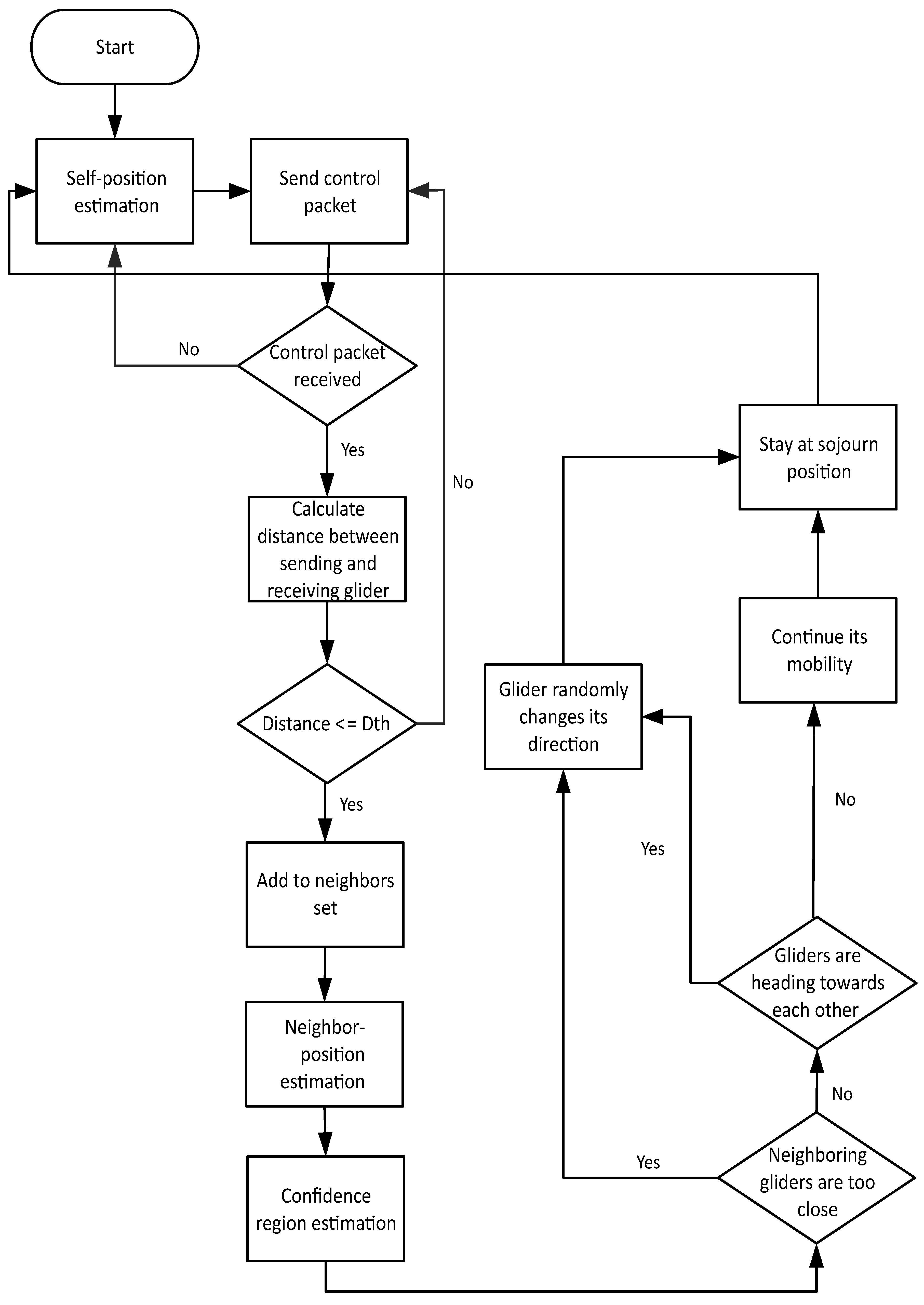
- Gliders heading towards each other: Consider Figure 4 for Case 2. Two gliders are at sojourn positions and waiting for a stay time. The control information at time is exchanged between these two gliders, and the position estimation process takes place. As both gliders are heading towards each other, so, at time , they will be overlapping each others’ course. In order to avoid this situation, one of the gliders needs to change its course. For this reason, the Markov process is performed especially considering the direction of the neighboring glider; then the future direction of the glider for time is shared with the neighbors. The mobility operation of gliders in PAMP is shown in Figure 5.
3.2. Cooperative Position-Aware Mobility Pattern
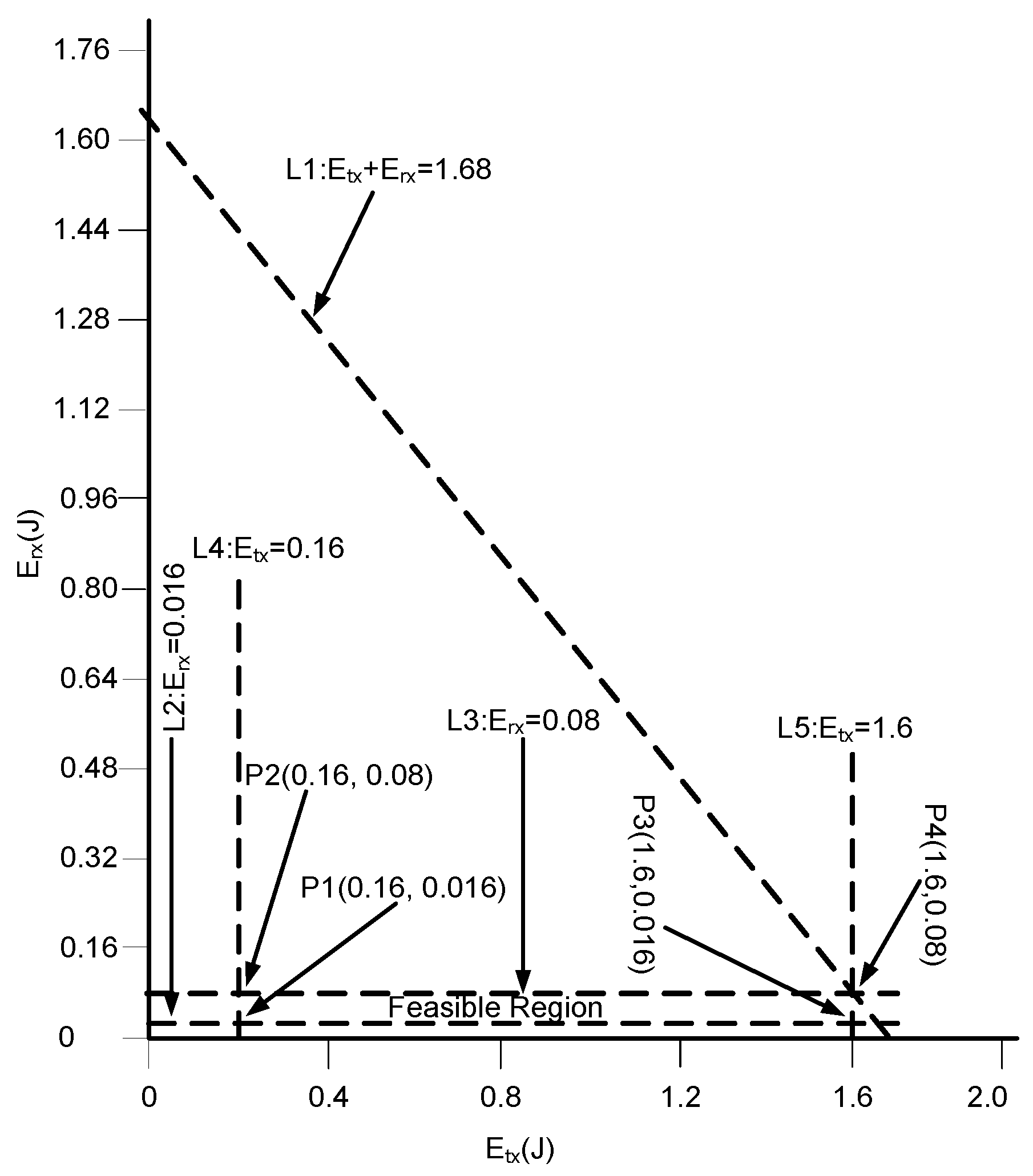
3.3. Throughput Maximization
- at : ,
- at : ,
- at : ,
- and at : ,
4. Performance Evaluation and Analysis
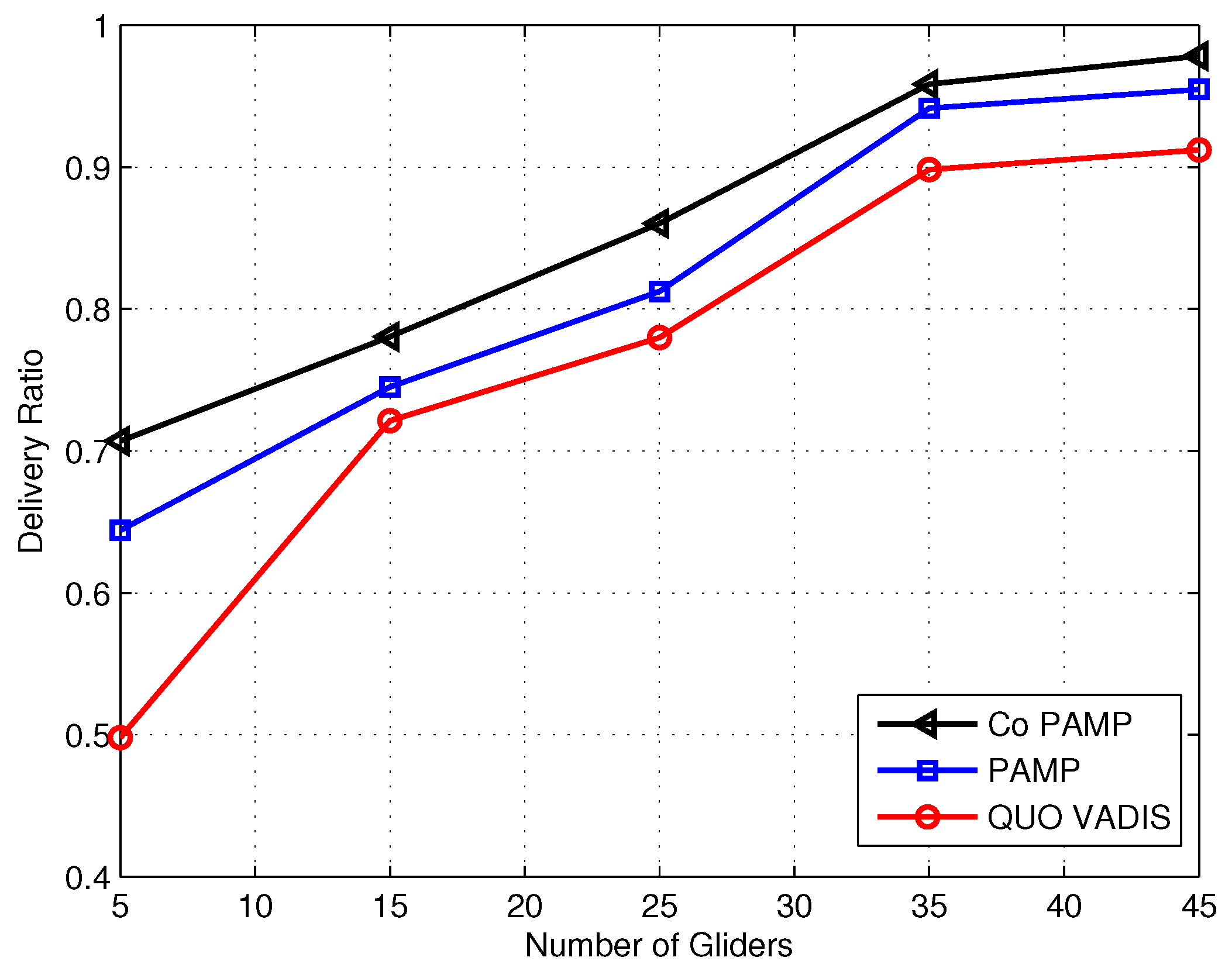
- Packet delivery ratio: the number of correctly received data packets over the number of data packets sent.
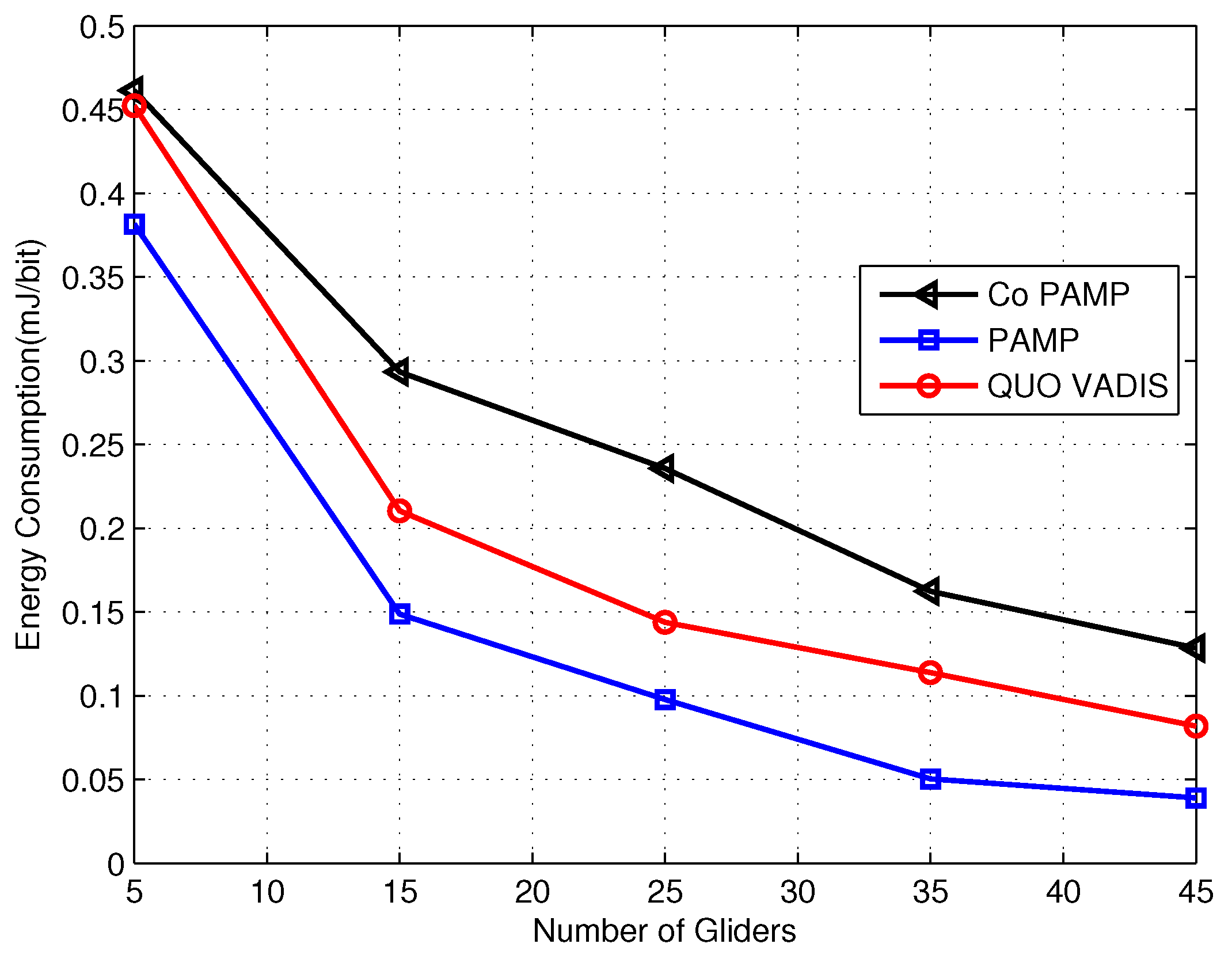
- Energy consumption: the average amount of energy consumed to route one bit of information from the source to the destination. The unit of energy consumption is joule (J).
- Delay: the time taken by a data packet to reach the destination from the source. Its unit is second (s).
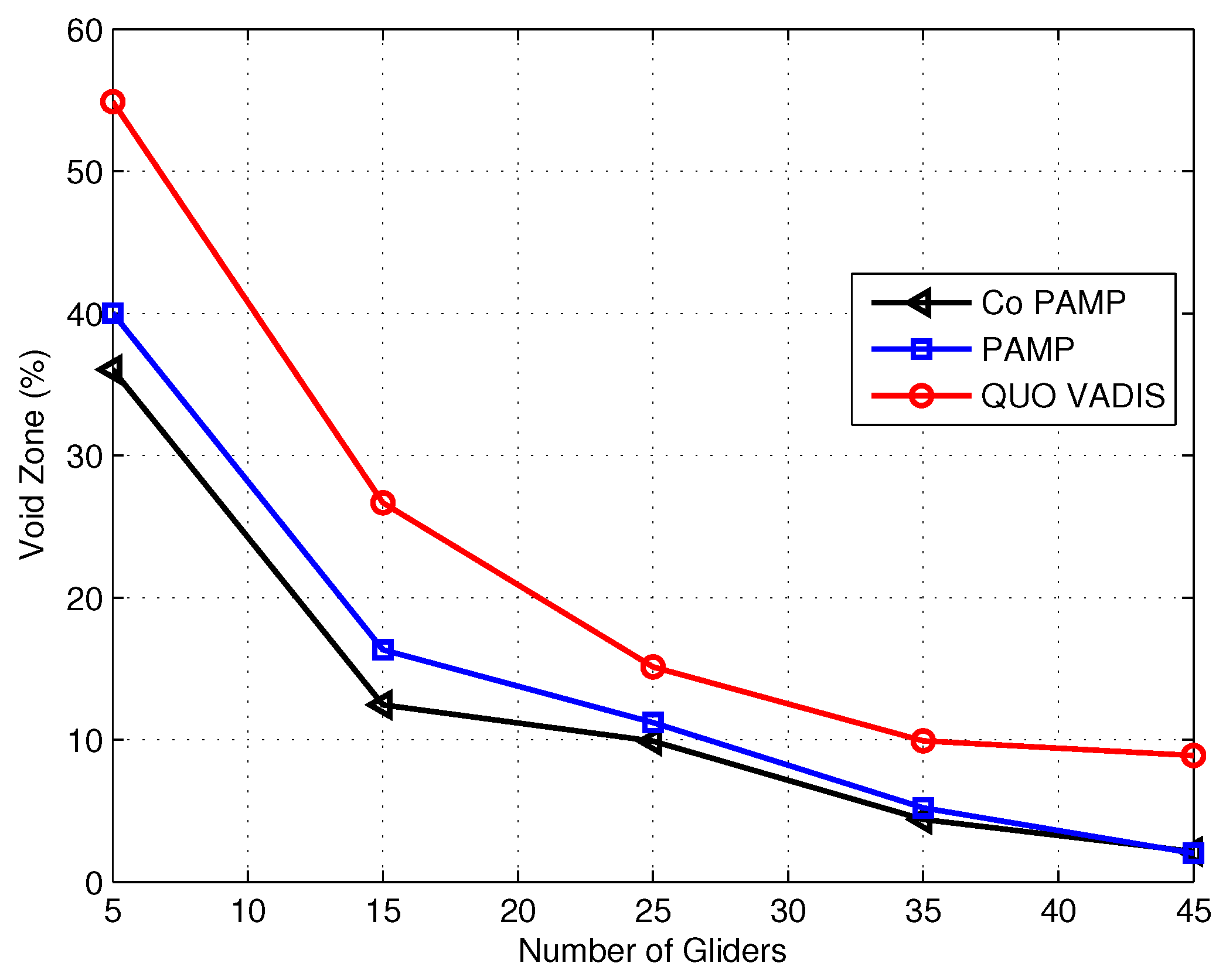
- Void zone: the network region that remains un-sensed or un-visited throughout the network lifetime. It is the ratio of the un-sensed region over the total volume of the network.
Performance Trade-Offs
5. Conclusions and Future Work
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Chen, B.; Pompili, D. A QoS-aware underwater optimization framework for inter-vehicle communication using acoustic directional transducers. IEEE Trans. Wirel. Commun. 2014, 13, 2490–2504. [Google Scholar]
- Akyildiz, I.F.; Pompili, D.; Melodia, T. Underwater acoustic sensor networks: Research challenges. Ad Hoc Netw. 2005, 3, 257–279. [Google Scholar] [CrossRef]
- Fallon, M.F.; Papadopoulos, G.; Leonard, J.J.; Patrikalakis, N.M. Cooperative AUV navigation using a single maneuvering surface craft. Int. J. Robot. Res. 2010, 29, 1461–1474. [Google Scholar] [CrossRef] [Green Version]
- Chen, Y.; Wang, Z.-H.; Wan, L.; Zhou, H.; Zhou, S.; Xu, X. OFDM-modulated dynamic coded cooperation in underwater acoustic channels. IEEE J. Ocean. Eng. 2015, 40, 159–168. [Google Scholar] [CrossRef]
- Chitre, M.; Motani, M. On the use of rate-less codes in underwater acoustic file transfers. In Proceedings of the IEEE/MTS OCEANS Conference, Aberdeen, Scotland, 18–21 June 2007; pp. 1–6.
- Cherkaoui, E.H.; Azad, S.; Casari, P.; Toni, L.; Agoulmine, N.; Zorzi, M. Packet error recovery via multipath routing and Reed–Solomon codes in underwater networks. In Proceedings of the IEEE/MTS OCEANS Conference, Hampton Roads, VA, USA, 14–19 October 2012; pp. 1–6.
- Ejaz, M.; Khan, M.A.; Qasim, U.; Khan, Z.A.; Javaid, N. Position Aware Mobility Pattern of AUVs for Avoiding Void Zone in Underwater WSNs. In Proceedings of the 2016 International Conference on Intelligent Networking and Collaborative Systems (INCoS), Ostrawva, Czech Republic, 7–9 September 2016; pp. 332–338.
- Bosch, J.; Gracias, N.; Ridao, P.; Istenič, K.; Ribas, D. Close-Range Tracking of Underwater Vehicles Using Light Beacons. Sensors 2016, 16, 429. [Google Scholar] [CrossRef] [PubMed]
- Zhang, T.; Chen, L.; Li, Y. AUV Underwater Positioning Algorithm Based on Interactive Assistance of SINS and LBL. Sensors 2016, 16, 42. [Google Scholar] [CrossRef] [PubMed]
- Osborn, J.; Qualls, S.; Canning, J.; Anderson, M.; Edwards, D.; Wolbrecht, E. AUV state estimation and navigation to compensate for ocean currents. In Proceedings of the OCEANS 2015-MTS/IEEE Washington, Washington, DC, USA, 19–22 October 2015; pp. 1–5.
- Chen, B.; Hickey, P.C.; Pompili, D. Trajectory-aware communication solution for underwater gliders using WHOI micro-modems. In Proceedings of the 2010 7th Annual IEEE Communications Society Conference on Sensor, Mesh and Ad Hoc Communications and Networks (SECON), Boston, MA, USA, 21–25 June 2010; pp. 1–9.
- Yoon, S.; Azad, A.K.; Oh, H.; Kim, S. AURP: An AUV-aided underwater routing protocol for underwater acoustic sensor networks. Sensors 2012, 12, 1827–1845. [Google Scholar] [CrossRef] [PubMed]
- Akbar, M.; Javaid, N.; Khan, A.H.; Imran, M.; Sohaib, M.; Vasilakos, A. Efficient Data Gathering in 3D Linear Underwater Wireless Sensor Networks Using Sink Mobility. Sensors 2016, 16, 404. [Google Scholar] [CrossRef] [PubMed]
- Khan, J.; Cho, H. A Distributed Data-Gathering Protocol Using AUV in Underwater Sensor Networks. Sensors 2015, 15, 19331–19350. [Google Scholar] [CrossRef] [PubMed]
- Javaid, N.; Ilyas, N.; Ahmad, A.; Alrajeh, N.; Qasim, U.; Khan, Z.A.; Liaqat, T.; Khan, M.I. An Efficient Data-Gathering Routing Protocol for Underwater Wireless Sensor Networks. Sensors 2015, 15, 29149–29181. [Google Scholar] [CrossRef] [PubMed]
- Ren, F.; Zhang, J.; He, T.; Lin, C.; Ren, S.K. EBRP: Energy-balanced routing protocol for data gathering in wireless sensor networks. IEEE Trans. Parallel Distrib. Syst. 2011, 22, 2108–2125. [Google Scholar] [CrossRef]
- Zhang, S.; Li, D.; Chen, J. A link-state based adaptive feedback routing for underwater acoustic sensor networks. IEEE Sens. J. 2013, 13, 4402–4412. [Google Scholar] [CrossRef]
- Basagni, S.; Petrioli, C.; Petroccia, R.; Spaccini, D. CARP: A Channel-aware routing protocol for underwater acoustic wireless networks. Ad Hoc Netw. 2015, 34, 92–104. [Google Scholar] [CrossRef]
- Noh, Y.; Lee, U.; Wang, P.; Choi, B.S.C.; Gerla, M. VAPR: Void-aware pressure routing for underwater sensor networks. IEEE Trans. Mob. Comput. 2013, 12, 895–908. [Google Scholar] [CrossRef]
- Latif, K.; Javaid, N.; Ahmad, A.; Khan, Z.A.; Alrajeh, N.; Khan, M.I. On energy hole and coverage hole avoidance in underwater wireless sensor networks. IEEE Sens. J. 2016, 16, 4431–4442. [Google Scholar] [CrossRef]
- Lee, U.; Wang, P.; Noh, Y.; Vieira, L.F.M.; Gerla, M.; Cui, J.H. Pressure Routing for Underwater Sensor Networks. In Proceedings of the INFOCOM, San Diego, CA, USA, 14–19 March 2010; pp. 1676–1684.
- Umar, A.; Javaid, N.; Ahmad, A.; Khan, Z.A.; Qasim, U.; Alrajeh, N.; Hayat, A. DEADS: Depth and Energy Aware Dominating Set Based Algorithm for Cooperative Routing along with Sink Mobility in Underwater WSNs. Sensors 2015, 15, 14458–14486. [Google Scholar] [CrossRef] [PubMed]
- Mansourkiaie, F.; Ahmed, M.H. Joint Cooperative Routing and Power Allocation for Collision Minimization in Wireless Sensor Networks With Multiple Flows. IEEE Wirel. Commun. Lett. 2015, 4, 6–9. [Google Scholar] [CrossRef]
- Tan, D.D.; Kim, D.S. Cooperative transmission scheme for multi-hop underwater acoustic sensor networks. Int. J. Commun. Netw. Distrib. Syst. 2014, 14, 1–18. [Google Scholar] [CrossRef]
- Habibi, J.; Ghrayeb, A.; Aghdam, A.G. Energy-efficient cooperative routing in wireless sensor networks: A mixed-integer optimization framework and explicit solution. IEEE Trans.Commun. 2013, 61, 3424–3437. [Google Scholar] [CrossRef]
- Mansourkiaie, F.; Ahmed, M. Optimal and Near-Optimal Cooperative Routing and Power Allocation for Collision Minimization in Wireless Sensor Networks. IEEE Sens. J. 2016, 16, 1398–1441. [Google Scholar] [CrossRef]
- Ahmed, S.; Javaid, N.; Khan, F.A.; Durrani, M.Y.; Ali, A.; Shaukat, A.; Sandhu, M.M.; Khan, Z.A.; Qasim, U. Co-UWSN: Cooperative energy-efficient protocol for underwater WSNs. Int. J. Distrib. Sens. Netw. 2015, 11, 891410. [Google Scholar] [CrossRef] [PubMed]
- Javaid, N.; Jafri, M.R.; Khan, Z.A.; Qasim, U.; Alghamdi, T.A.; Ali, M. Iamctd: Improved adaptive mobility of courier nodes in threshold-optimized dbr protocol for underwater wireless sensor networks. Int. J. Distrib. Sens. Netw. 2014, 2014, 1–12. [Google Scholar] [CrossRef]
- Ikki, S.S.; Ahmed, M.H. “Performance analysis of incremental-relaying cooperative-diversity networks over Rayleigh fading channels. Commun. IET 2011, 5, 337–349. [Google Scholar] [CrossRef]
- Basagni, S.; Petrioli, C.; Petroccia, R.; Spaccini, D. Channel-aware routing for underwater wireless networks. In Proceedings of the 2012 Oceans-Yeosu IEEE, Yeosu, Korea, 21–24 May 2012; pp. 1–9.
- Onat, F.A.; Adinoyi, A.; Fan, Y.; Yanikomeroglu, H.; Thompson, J.S.; Marsland, I.D. Threshold selection for SNR-based selective digital relaying in cooperative wireless networks. IEEE Trans. Wirel. Commun. 2008, 7, 4226–4237. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Technique | Features | Achievements | Limitations |
|---|---|---|---|
| QUO VADIS [1] | Optimization technique based on position estimation and uncertainty and predefined trajectory of gliders | Low end to end delay | Transmission power is increased |
| Close-range tracking of AUVs [8] | Use of light beacon messages and camera to estimate the position of AUV | Exact and approximate position of the AUV is computed | Range is very short |
| SINS [9] | Positioning algorithm based on the strap down inertial navigation system (SINS) and the long baseline (LBL) positioning system | Exact position of the AUV is estimated | High energy consumption |
| AUV state estimation [10] | Kalman filter is used to estimate the state of the AUV | Navigation and state estimation of the AUV is done | High energy consumption |
| Trajectory-aware routing [11] | Model for the position uncertainty of the underwater glider | Minimization in uncertainty or error | High packet drop ratio |
| Technique | Features | Achievements | Limitations |
|---|---|---|---|
| AURP [12] | Long data transmissions are minimized using AUVs as relay nodes | High delivery ratio and low energy consumption | High end to end delay |
| 3D-SM [13] | Use of MS and courier nodes to transmit data | Energy consumption of normal nodes is minimized | High end to end delay |
| Distributed data gathering [14] | Routing using clusters and collection of data from path nodes using AUVs | Adjustment in transmission power | Overall transmission power is not minimized |
| AEDG [15] | Association of sensor nodes with gateway nodes | Reliability of data delivery at the destination | High end to end delay |
| EBRP (Energy Balanced Routing Protocol) [16] | Depth, residual energy and density of sensor nodes are considered as routing metrics | Energy of sensor nodes is saved and consumed in a balanced way | Low network lifetime |
| LAFR [17] | Link-state-based adaptive feedback routing and link state information is used for adaptive feedback | Utilization of asymmetric links and routing tables is maintained | Low network lifetime |
| CARP [18] | Selection of relay nodes that exhibit the latest history of successful data transmission | Loops are avoided, and data are routed around void and shadow zones | High end to end delay and more energy consumption |
| VAPR [19] | Void-aware pressure routing and sonobuoy propagates the control information | Avoidance of void zone | High end to end delay |
| Coverage hole avoidance [20] | Repairing of the coverage hole during network operation | Low energy consumption, high throughput and network lifetime | High end to end delay |
| Technique | Features | Achievements | Limitations |
|---|---|---|---|
| Pressure routing for UASNs [21] | Cooperative routing and relay nodes are selected that are facing towards the destination | High throughput | High energy consumption |
| Depth and Energy Aware Dominating Set [22] | Single and multiple relay cooperative routing | High throughput and low packet drop ratio | High energy consumption |
| MCCR [23] | Cross-layer cooperative routing | Minimized collision | High end to end delay |
| Cooperative transmission [24] | Cooperative routing in a multi-hop network | Increased the packet delivery ratio and reduced the end-to-end delay | Nodes with reliable link die quickly |
| Optimal schemes [26] | Formulated problem with MINLP and solved using branch and bound algorithm | Reduced search space of the algorithm | The mechanism is not applicable to a dynamic topology |
| Co-UWSN [27] | Destination and relay node are selected using cost function, which depends on distance and SNR of the link | Considerable low end to end delay and less energy consumption | Redundant data forwarding and ACK mechanism on every packet is costly |
| Parameter | Values |
|---|---|
| Network volume | m |
| Number of gliders | [5, 15, 25, 35, 45] |
| Confidence parameter β | |
| Power (min, max) | (1–10) W |
| Velocity of glider (s) | 0.25 m/s |
| Gliding depth range (R) | [0–1000] m |
| error (p) | 2 m |
| Operating frequencies (f) | [10, 15, 25] kHz |
| Protocol | Achieved Parameters | Figure | Compromised Parameter | Figure |
|---|---|---|---|---|
| QUO VADIS | Delivery ratio | Figure 8 | Delay | Figure 10 |
| PAMP | Delivery ratio energy consumption | Figure 8 | Delay | Figure 10 |
| Figure 9 | ||||
| Co PAMP | Delivery ratio | Figure 8 | Energy consumption delay | Figure 9 |
| Figure 10 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license ( http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Javaid, N.; Ejaz, M.; Abdul, W.; Alamri, A.; Almogren, A.; Niaz, I.A.; Guizani, N. Cooperative Position Aware Mobility Pattern of AUVs for Avoiding Void Zones in Underwater WSNs. Sensors 2017, 17, 580. https://doi.org/10.3390/s17030580
Javaid N, Ejaz M, Abdul W, Alamri A, Almogren A, Niaz IA, Guizani N. Cooperative Position Aware Mobility Pattern of AUVs for Avoiding Void Zones in Underwater WSNs. Sensors. 2017; 17(3):580. https://doi.org/10.3390/s17030580
Chicago/Turabian StyleJavaid, Nadeem, Mudassir Ejaz, Wadood Abdul, Atif Alamri, Ahmad Almogren, Iftikhar Azim Niaz, and Nadra Guizani. 2017. "Cooperative Position Aware Mobility Pattern of AUVs for Avoiding Void Zones in Underwater WSNs" Sensors 17, no. 3: 580. https://doi.org/10.3390/s17030580