1. Introduction
In the last few years, miniaturization of flight control systems and payloads, and the availability of computationally affordable algorithms for autonomous guidance, navigation and control (GNC), have contributed to an increasing diffusion of micro-unmanned aircraft systems (micro-UAS). Besides military applications, micro-UAS can play a key role in several civil scenarios, and the attention of international top level companies and research centers has been focused on the adoption of these systems for commercial purposes [
1,
2] and on the paradigms for a safe and profitable access of micro-unmanned aerial vehicles (micro-UAVs) to civil airspace [
3,
4].
Micro-UAV navigation is typically based on the integration of low cost GNSS receivers and commercial grade Micro-Electro-Mechanical Systems (MEMS)-based inertial and magnetic sensors. An extensive review of techniques based on the integration of low cost Inertial Measurement Units (IMUs) and GNSS can be found in [
5]. However, these navigation systems, only provide position accuracies of approximately 5–10 m and attitude accuracies of approximately 1°–5°, which are good enough to realize automated waypoint following, but are insufficient for most of the remote sensing or surveying applications in which fine sensor pointing is required [
6,
7]. Furthermore, collaborative sensing and data fusion frameworks are based on data registration as a fundamental pre-requisite, which may be directly correlated with navigation accuracy. There exist different approaches to improve UAV navigation performance.
A direct solution is to utilize high performance navigation systems. As an example, high accuracy aerial mapping systems, besides adopting dual frequency GPS receivers for accurate positioning with respect to fixed ground stations, usually exploit tactical grade IMU and/or dual GPS antenna architectures explicitly aimed at improving heading accuracy. The main disadvantages of this approach are in terms of cost and challenges related to installing dual antenna configurations on-board small UAVs. In fact, in [
6] a heading accuracy of the order of 0.2°–0.5° is attained by installing the two antennas with a baseline of 1 m.
Some authors have instead followed an approach based on developing upgraded algorithmic solutions to enhance navigation performance for given low accuracy MEMS sensors. As an example in de Marina et al. [
8], the Three-Axis Determination (TRIAD) algorithm [
9] is used to measure the Direct Cosine Matrix (DCM) of a fixed wing aircraft, where the two reference vectors are the Earth’s magnetic field vector and gravity in North East Down (NED) coordinates, while the two observation vectors are obtained by means of magnetometers and accelerometers in the Body Reference Frame (BRF). This method is not applicable in all flight conditions, especially in presence of an external magnetic field that corrupts the magnetic measurements or when accelerations acting on the aircraft do not allow a precise identification of the gravity observation unit vector. The authors assume an attitude accuracy requirement of 1.0° on pitch and roll and 4.0° on heading, as required by industry for a fixed wing aircraft [
10]. In Valenti et al. [
11], attitude is obtained from the observation of the gravity and magnetic fields, where the degrading effects of magnetic disturbances on pitch and roll are mitigated separating the problem of finding the tilt and the heading quaternion with an improvement in attitude estimation. However the heading angle uncertainty is still of the order of 10°. In both cases the algorithmic improvements cannot overcome technological limitations of consumer grade IMUs.
Another approach is to integrate electro-optical sensors to detect and track natural or manmade features. Some of these vision-based techniques require the a-priori knowledge of ground control points of known appearance [
12,
13] in order to find homologous pairs between an on-board geotagged database and the images taken by the flying viewing system. Others estimate the egomotion of the vehicle relying only on the motion of features in consecutive images [
14,
15,
16,
17]. Moreover, several Simultaneous Localization and Mapping (SLAM) techniques have been developed [
18,
19] in which the vehicle build a map of the environments while simultaneously determining its location. Indeed, SLAM techniques are usually considered to limit the drift induced by inertial sensors when flying in GPS-denied and unknown environments, more than to improve navigation accuracy under nominal GPS coverage.
Furthermore, vision-aided SLAM approaches present limits such as the necessity to detect and track natural or manmade features in a sequence of overlapping images which require a static and textured scene in good illumination conditions. This is not the case when UAS are flying over areas covered by snow, wood, sand or water e.g., day and night Search and Rescue (S&R) or natural hazards missions. Open issues to be solved remain to render the approach generally operational such as accumulated drift over time, computational complexity and data association.
The aforementioned methods exploit only one micro-UAS. However, due to single micro-UAS limits in terms of reliability, coverage and performance, multi-UAV systems have encountered increasing interest in the unmanned systems community [
20,
21,
22,
23] both for military and civil applications.
Within this framework, most of the research on cooperative navigation techniques focuses on GPS-challenging or denied environments. In Merino et al. [
24] navigation in GPS-denied areas is performed acquiring overlapping images of the scene from different UAS in which at least one of them has GPS coverage. Once blob features [
25] are matched among those images, it is possible to recover UAS's relative positions and consequently the absolute position of each vehicle. A similar approach has been followed by Indelman et al. [
26] and Melnyk et al. [
27] in which overlapping views are processed in order to evaluate relative positions in swarms. Heredia et al. [
28] continued the work presented in [
24] addressing the open issue of reliability, developing a Fault Detection and Identification (FDI) technique.
These Cooperative Localization (CL) techniques, in addition to the vision-based approaches drawbacks mentioned above, are affected by the need of acquiring multiple images from different platforms with an overlap that ranges from 50% up to 80% which limits the vehicles speed and requires an assigned distance between the platforms depending on the flight height and the Field of View (FOV).
This paper presents a new approach to improve the absolute navigation performance of a formation of UAVs flying in outdoor environments under nominal GPS coverage, with respect to the one achievable by integrating low cost IMUs, GNSS and magnetometers. The developed concept is to use the required formation of UAVs to build virtual navigation sensors that provide additional measurements, which are based on DGPS among flying vehicles and visual information and are not affected by magnetic and inertial disturbances. The architecture exploits cooperative GPS, as in multi-antenna attitude estimation architectures [
29,
30,
31]. In particular, while the latter ones exploit carrier phase processing and short baselines (known by calibration) between antennas rigidly mounted on the vehicle, the new approach described in this paper is to exploit differential GPS using antennas embarked on different vehicles, where the exact geometry among them is unknown, but the line of sight between antennas can be estimated by vision sensors.
The main innovative points are: the cooperative nature of the UAV formation is exploited to obtain drift-free navigation information; for the first time, UAV absolute attitude is estimated combining DGPS among flying vehicles and vision-based information. Indeed, the exploitation of DGPS among flying vehicles to derive attitude information is a novel concept itself. Compared with traditional navigation systems, the main advantages of our method are:
- -
The possibility to attain high accuracy navigation performance (e.g., sub-degree attitude measurement accuracy) without requiring high cost avionics technologies, known ground features, or textured ground surfaces.
- -
Reduced computational complexity.
- -
Independency of the navigation information from magnetic disturbances and inertial errors, also allowing better estimation of biases for these sensors [
32].
- -
Absence of error drifts in time.
The main disadvantage is the need of keeping vehicles within the camera(s) FOV in a multi-UAV scenario. However, considering typical performance limitations of micro-UAVs, a multi-vehicle architecture could be adopted, regardless of navigation needs, in order to improve coverage and reliability. Then, the proposed approach does not require close formation control and precise relative navigation, which makes its implementation much easier. Finally, considering the cost of micro-UAV systems with consumer grade avionics, having several UAVs can be more cost effective than equipping a single vehicle with high performance navigation hardware.
The objectives of this work are as follows:
- -
To present a cooperative navigation architecture that is able to ensure improved navigation performance in outdoor environment, with a major focus on attitude estimation based on differential GPS and vision-based tracking. This is done in
Section 2 and
Section 3;
- -
To evaluate the achievable attitude accuracy in a numerical error analysis, pointing out the effects of DGPS/Vision measurement uncertainties and formation geometry. This is presented in
Section 4;
- -
To compare, in flight tests, cooperative navigation output with traditional single vehicle-based data fusion implementations, thus highlighting main performance advantages of the proposed approach
Section 5 and
Section 6. In particular, in
Section 5 a validation strategy is presented in which a ground control point is used to evaluate DGPS/Vision attitude accuracy. Experimental results are reported in
Section 6.
2. Cooperative Navigation Architecture
As stated above, cooperation is here exploited to improve the absolute navigation performance of formation flying UAVs in outdoor environments. This is done thanks to an architecture that integrates differential GPS and relative sensing by vision (defined as “DGPS/Vision” in what follows) within a customized sensor fusion algorithm.
Considering a formation of at least two UAVs flying cooperatively, the objective is to improve the absolute navigation performance for a “chief” vehicle, equipped with inertial and magnetic sensors, a GPS receiver, and a vision system, thanks to “deputy” vehicles equipped with GPS antenna/receivers and flying in formation with the chief. On the other hand, if GPS observables are exchanged among all the vehicles, and if each vehicle is able to track at least another UAV by one or more onboard cameras, each vehicle can exploit cooperation to improve its absolute navigation performance (i.e., each vehicle can be a chief exploiting information from other deputies). The proposed cooperative navigation technique can be used either in real time or in post processing phase. In the former case, proper communication links have to be foreseen among vehicles.
In the following we assume that:
- -
GPS is available for all vehicles that comprise the formation.
- -
Each vehicle attains the same absolute positioning accuracy.
On the basis of these assumptions, the DGPS/Vision method, described in this paper, focuses on improving the UAV attitude accuracy, leaving to the sensor fusion algorithm the position and velocity improvement, as shown in [
33].
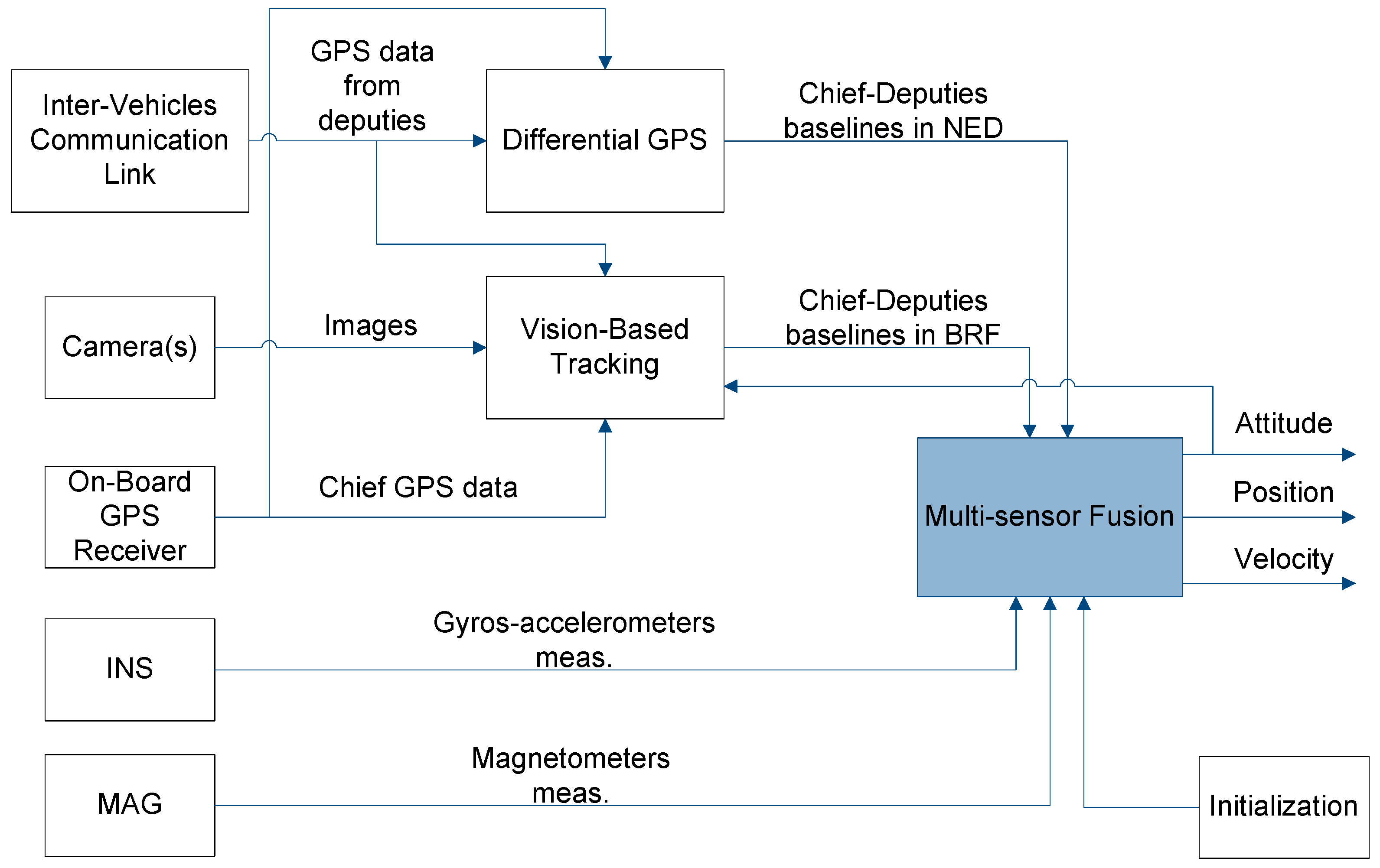
The overall cooperative navigation architecture is shown in
Figure 1 where input data include: GPS measurements from the chief and the deputies; images (taken by the chief) of deputies within the FOV; inertial/magnetic data provided by the chief onboard IMU. Three processing steps are then involved:
- -
The vision-based tracking algorithm that allows extracting chief-to-deputies unit vectors in the BRF.
- -
The Differential-GPS (DGPS) block which returns chief to deputies baselines in a stabilized NED reference frame.
- -
A multi-sensor fusion algorithm based on an Extended Kalman Filter (EKF), which can be used to combine different information sources obtaining a more accurate and reliable navigation solution.
As it will be made clearer in the next section, depending on the processing scheme, DGPS and vision-based information can be directly integrated in the EKF, or it can be used to provide an attitude estimate that is then integrated as an additional measurement within the state estimation filter. The latter solution is the one considered in this work.
3. DGPS/Vision Attitude Determination Method
Vision-based tracking provides chief-deputies unit vectors in the Camera Reference Frame (CRF), which are then converted into the BRF either by only using a constant rotation matrix (accurately estimated off-line) in the case of strapdown installation, or by exploiting gimbal rotation angles in the case of gimbaled installation.
The available GPS data, and the estimated chief attitude, can be used to cue the vision-based tracking system and individuate search windows within acquired images, improving target detection reliability and significantly reducing processing time. As an example, deputies can be tracked in the video sequences by adopting template matching approaches based on computing and maximizing the Normalized Cross Correlation (NCC) [
34]. This provides an estimate of deputy centroid in pixel coordinates, which are then converted into line-of-sight (LOS) information by the intrinsic camera model.
Vision-based tracking performance for given chief/deputy platforms basically depends on the range to deputies, on environmental conditions (impacting deputy appearance, contrast and background homogeneity), and on camera(s) parameters, such as quantum efficiency and instantaneous field of view (IFOV). Moreover, camera FOV limits the maximum angular separation between deputies that can be exploited.
In order to increase the detection range performance for a given sensor, the IFOV can be reduced increasing optics focal length, and thus reducing the overall FOV and the possibility to detect widely separated deputies. The trade-off between coverage and detection range can be tackled by installing higher resolution sensors and/or multiple camera systems.
As concerns DGPS, it can be carried out in different ways such as carrier phase differential and code-based differential processing [
35]. Dual frequency carrier phase DGPS provides the most accurate relative positioning solution (cm-level error) adopting relatively expensive onboard equipments and also paying the cost of a significant computational weight [
35]. Dual frequency GPS receivers are uncommon on micro UAVs, with some exceptions [
36]. Indeed, a lower accuracy can be obtained even with single frequency carrier phase differential processing, provided that the integer ambiguity is solved.
The solution adopted in this work, is code-based DGPS, which requires hardware that is affordable for commercial micro UAVs, less observables to be exchanged between different vehicles (basically, only pseudoranges from common satellites in view) and much lighter processing.
A basic estimate of code-based DGPS relative positioning accuracy can be obtained multiplying typical Diluition of Precision (DOP) values by the average User Equivalent Range Error (UERE) accuracy in DGPS operating scenarios. Indeed, this is a conservative approach since pseudorange measurements correlation is increased in differential architectures. This computation leads to a typical 1-sigma accuracy of the order of 0.99 m (horizontal) and 1.86 m (vertical) [
37,
38,
39].
While this uncertainty would correspond to a very rough angular accuracy, in the case of short baselines among rigidly mounted antennas on a single aerial platform [
29,
30,
31], in our case a fine angular accuracy can still be attained by increasing the baselines between the chief and the deputies, thus converting position uncertainties into relatively small angular errors.
It is also interesting to underline that within our scenarios, it is likely that the different GPS receivers use the same satellites for position fix, which leads to the possibility of a significant cancellation of common errors even by adopting position-based DGPS, i.e., by simply calculating the difference between the various position fixes.
The unit vectors (camera and DGPS) obtained by using the DGPS/Vision method, can be used to provide navigation information in different ways, such as:
- -
Directly integrating line of sight measurements within an EKF (which works for any number of deputies);
- -
TRIAD [
40] (which works for two deputies);
- -
QUEST [
41] (which works for two and more deputies).
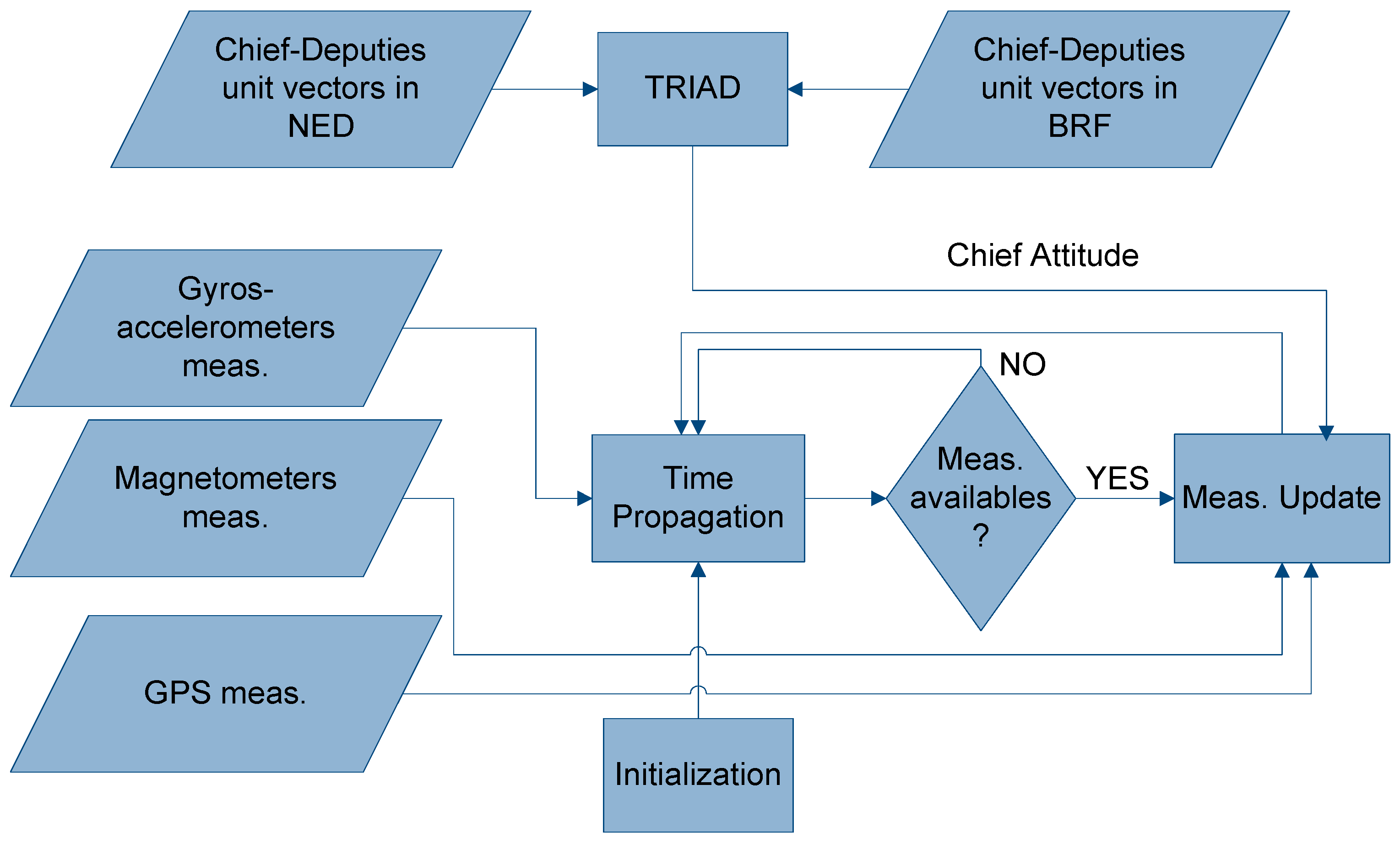
The second and the third approach provide a straightforward attitude estimate. In this work, the focus is set on demonstrating the potential of DGPS/Vision attitude determination, thus we assume a formation with two deputies and TRIAD-based processing.
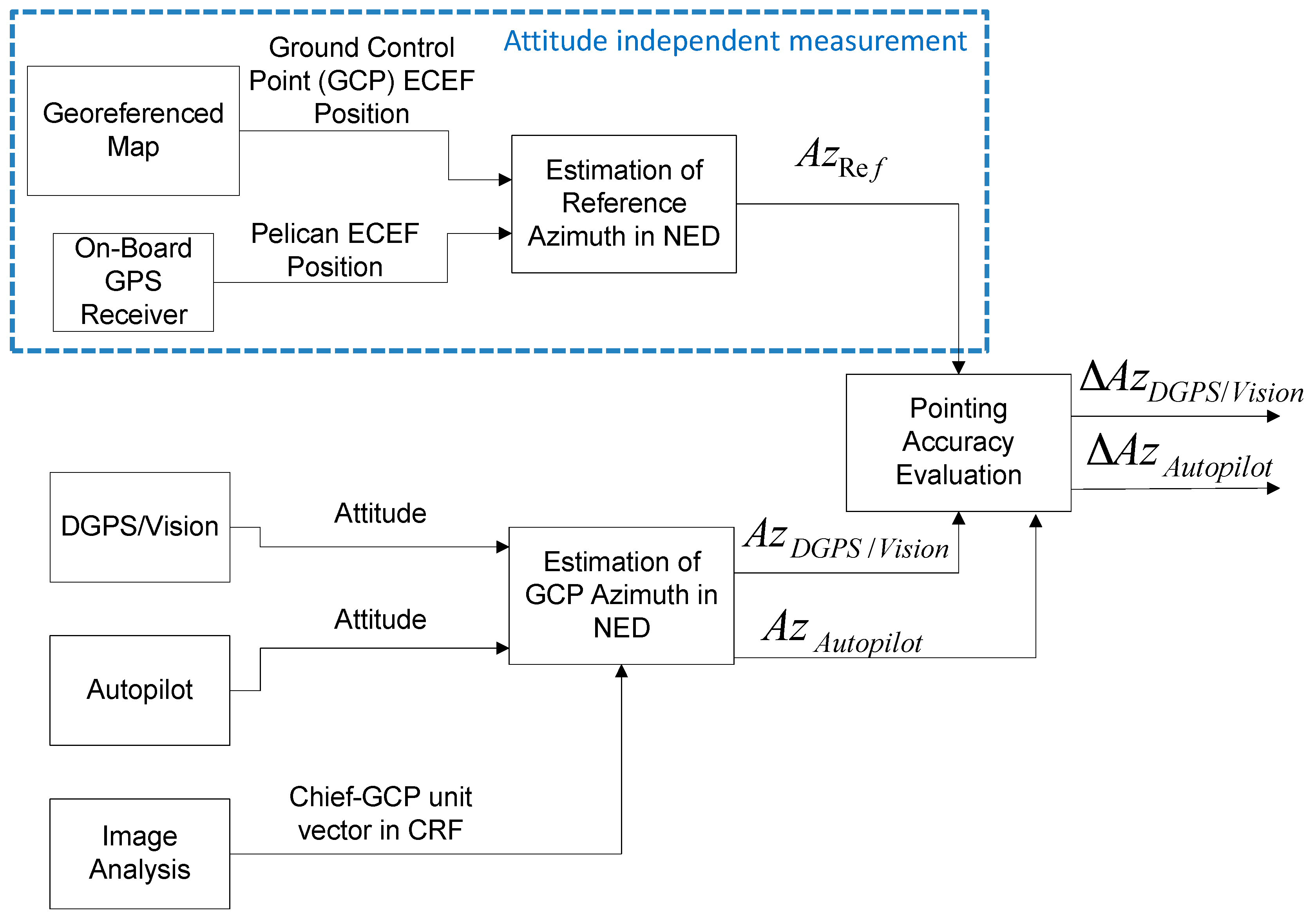
In particular, once the attitude is estimated by TRIAD, the estimate can be included as an additional measurement in a classical EKF-based aided navigation algorithm [
37], which works on the basis of a prediction-correction scheme (
Figure 2). The reader is referred to [
42] for a detailed explanation of the navigation filter, while this paper focuses on attitude estimation aspects.
The main advantage in using two deputies lies in the possibility to obtain direct inertial- and magnetic-independent attitude information, with a reduced computational load. Also, having two deputies improves reconfiguration capabilities of the distributed navigation sensor, as two lines-of-sight can be used to the chief advantage. The main disadvantage is the need of keeping both deputies within the FOV of chief camera(s). However, the possible challenges related to this point depend on the specifications of the adopted vision sensor(s) and the consequent trade-offs between angular accuracy and coverage.
The TRIAD algorithm [
40,
43,
44] is an analytical method to determine the rotation matrix between two reference frames in a straightforward manner. In particular, given two nonparallel reference unit vectors
,
in a primary reference frame and two corresponding observation unit vectors
,
represented with respect to a secondary reference frame, TRIAD starts defining two orthonormal triads of vectors
and
given by:
and determines the unique orthogonal matrix
which converts from the primary to the secondary reference frame as follows:
where
and
are 3 × 3 matrices.
As shown in
Figure 2, the two vector pairs needed by the DGPS/Vision method to compute the attitude matrix are the chief-to-deputies BRF and NED (DGPS) unit vectors which are computed as explained in the following sections.
The two unit vectors in BRF are obtained starting from the pixel coordinates (
) of the two deputies
within images acquired by the Pelican camera(s), which can be extracted by proper vision-based techniques. The normalized pixel coordinates
of the two deputies are then obtained by applying the intrinsic camera model [
45,
46] which takes into account the focal length, the principal point coordinates, the radial and tangential distortion coefficients, and the skew coefficient. Consequently Azimuth and Elevation and the unit vectors in CRF are then computed as follows:
where
is the unit vector of components (
,
,
) in CRF. The unit vectors in BRF, to be used as reference vectors within the TRIAD algorithm, are given by:
where
is the constant rotation matrix from CRF to BRF and
is the unit vector in BRF.
The other two vectors needed to apply the TRIAD algorithm are the chief-to-deputies NED unit vectors. In this work, these vectors are obtained by adopting a Double Difference (DD) code-based DGPS solution [
35], which offers significant advantages due to the cancellation of receiver and satellite clock biases, as well as most of the ionospheric and tropospheric propagation delays. To this end, it is assumed that the chief and the two deputies are in view of the same
satellites and consequently their pseudorange measurements are available which allow to calculate single and DD observables. In particular, considering the chief and the
i-th deputy, and two GPS satellites, one of which named pivot, DD observables are obtained as follows
where the superscript
refers to the pivot GPS satellite, which is chosen to be the one with the highest elevation,
refers to the generic satellite
, the subscripts
and
represent the chief and the
i-th deputy vehicle GPS receiver respectively,
stands for the pseudorange estimated by the
i-th receiver with respect to the
k-th satellite, and a similar interpretation holds for the other estimated pseudoranges.
The DD observation model is a non linear function of the baseline
between the chief and
i-th deputy in the Earth Centered Earth Fixed (ECEF) reference frame as shown in the following equation:
where
represents the DD between the true pseudoranges,
is the chief ECEF position,
and
are the pivot and
k-th satellites ECEF positions and
are the non-common mode pseudorange errors. The problem of finding
is solved applying a recursive least square estimation method based on the linearization of the DD observation model [
35].
The
i-th baseline
in the NED reference frame, with origin in the chief center of mass (usually defined as “navigation frame” [
37]), is then given by:
where
is the rotation matrix from the ECEF to the navigation frame that depends on the chief longitude
and geodetic latitude
.
Of course, the accuracy of the resulting attitude estimate depends on several factors such as DGPS and vision-based tracking errors, formation geometry, and chief vehicle attitude. These aspects are analyzed in the following section.
For the case of n deputies
, n unit vectors can be computed in BRF and NED by applying Equations (4)–(7) and (8)–(11), respectively. In this case, the optimal solution is given by the QUEST algorithm [
41] which minimizes a quadratic cost function involving an arbitrary number of vector measurements made in BRF and NED.
4. Error Analysis
In order to analyze the performance of the DGPS/Vision sensor, a numerical approach has been followed. In particular, for a given chief attitude and formation geometry, DGPS and optical measurements are simulated by random extractions, and the resulting attitude measurement error is analyzed with statistical tools.
Indeed, an analytical solution exists which allows estimation of TRIAD attitude error covariance matrix [
40] as a function of formation geometry and line-of-sight uncertainties. The basic assumptions underlying this derivation are that errors must to first order lie in the plane perpendicular to the respective unit vector, and have an axially symmetric distribution about it.
The second assumption clearly does not hold in the architecture considered in this paper, due to the difference in GPS performance between the horizontal plane and the vertical direction [
37,
38,
39]. Worst case or averaging approaches in using TRIAD covariance matrix equation are clearly sub-optimal and can produce over or under-conservative results.
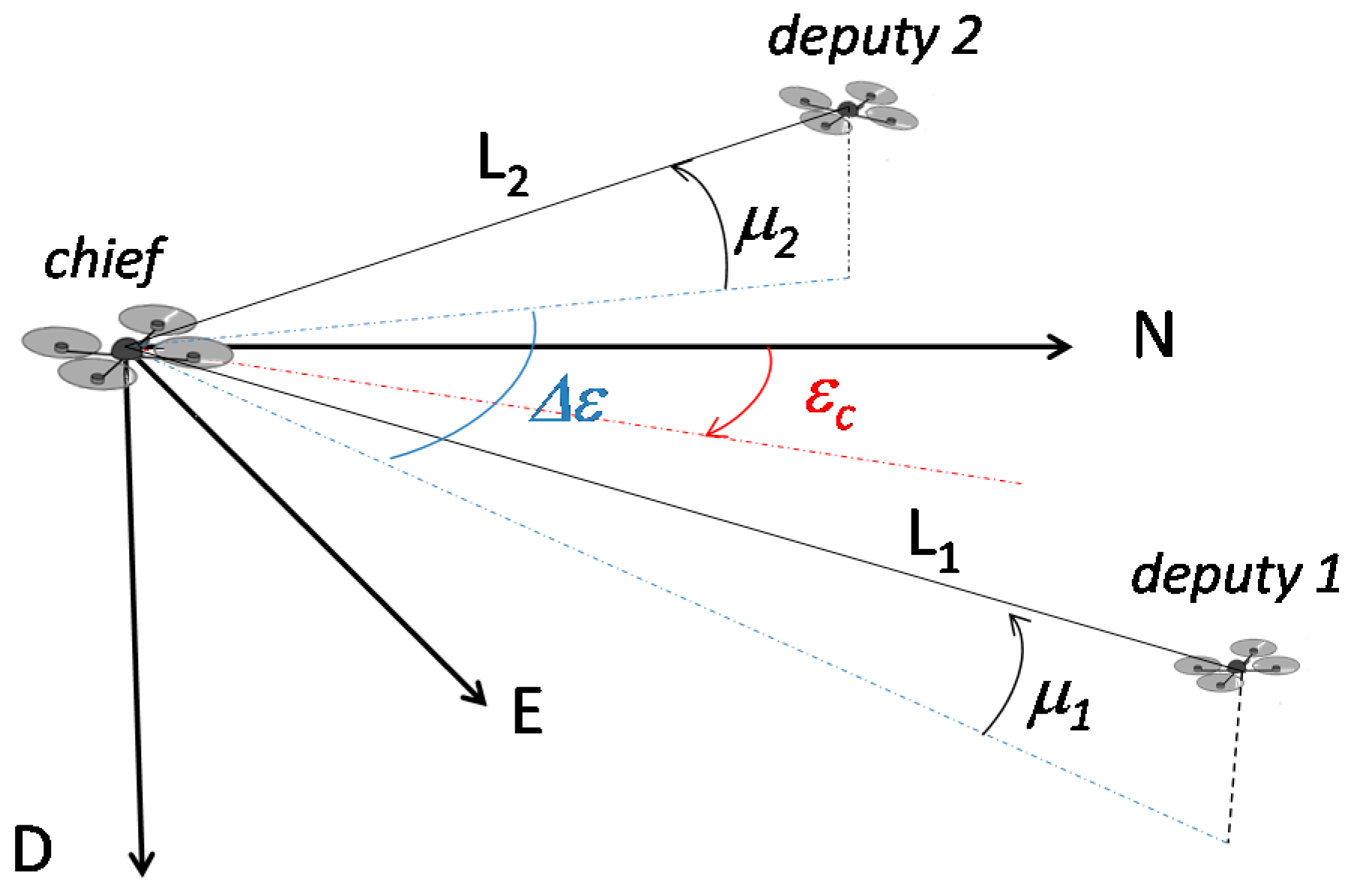
Regarding the numerical simulation architecture, the usual 321 sequence of Euler angles (heading, pitch, and roll), and the case of chief null attitude angles are assumed. In general, each deputy is instantaneously located at given azimuth and elevation angles (
εi and
μi) with respect to the body reference frame of the chief, and at a different range (
Li). In order to underline the main effects on measurement accuracy, formation geometry can be conveniently described in terms of azimuth center
and azimuth separation
between the deputies:
Formation geometry is depicted in
Figure 3.
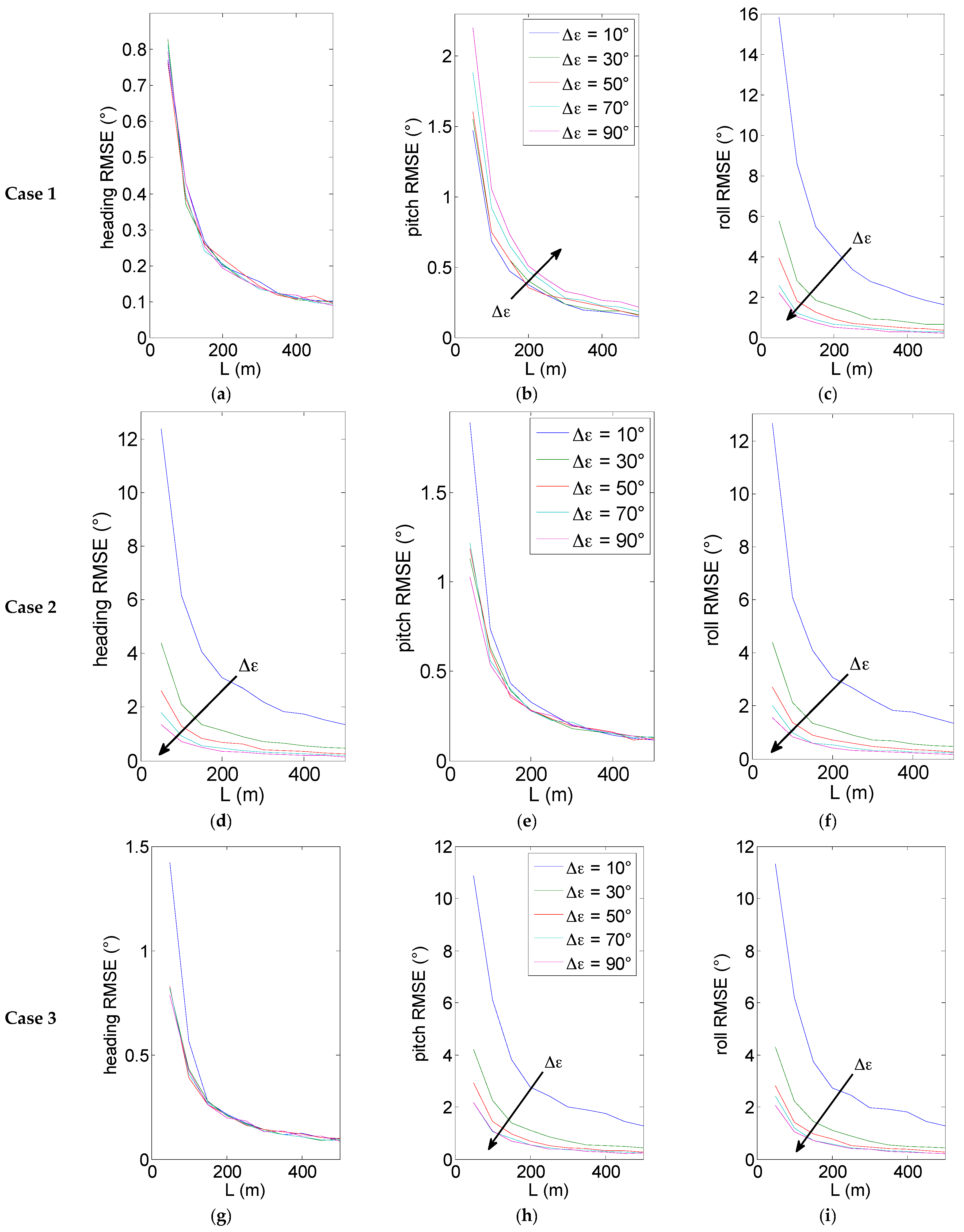
EO-based azimuth and elevation errors are simulated as zero-mean gaussian noises with standard deviation equal to 0.05°, which is consistent with typical IFOV values of sensors commonly found onboard micro-UAVs. For the sake of simplicity, the case of equal range and elevation is considered for the two deputies. Then, three cases are analyzed:
- -
Case 1: horizontal geometry with azimuth center at 0°;
- -
Case 2: “tilted” geometry with azimuth center at 0°;
- -
Case 3: horizontal formation with azimuth center at 45°.
For each case, a variable angular separation between deputies is considered. The three cases are summarized in
Table 1.
Results based on 200 numerical simulations are shown in
Figure 4 for the three considered cases.
Figure 4 offers several points of discussion.
The above diagrams show as expected that increasing the baseline improves the attitude estimation accuracy, with an error dependency on 1/L. This is mainly related to how angular differential GPS uncertainty decreases by increasing the baseline between the antennas. As already stated above, this advantage must be traded-off against the performance of vision-based tracking, given the decreasing dimensions in pixels of the deputies. As an example, an instantaneous field of view of 0.05° corresponds at a distance of 100 m to a geometric resolution of 9 cm. Consequently, a longer baseline requires an improvement of the geometric resolution of the vision sensors which can be attained by decreasing the FOV or installing a multi-camera system on the chief. Furthermore, differences among attitude angles are due to the different contributions of horizontal and vertical DGPS uncertainties.
As regards the relation between formation geometry and attitude accuracy, it is clear that in all cases the impact of line of sight uncertainties on attitude determination errors mainly depends on the angle between unit vectors and the considered chief body axes.
In Case 1 (
Figure 4a), heading error does not depend on ∆ε, since in all cases unit vectors are normal to the third axis of the BRF. In the considered formation geometry the heading uncertainty basically depends only on the horizontal GPS error and thus exhibits the finest accuracy: the uncertainty is always well below 1°, and fast approaches 0.1° for increasing baselines. This is a very useful result coming out from the proposed DGPS/Vision sensor to be pointed out considering typical high uncertainties in estimating magnetic heading on board small and micro UAVs and the consequent interest in high cost compact navigation systems (e.g., based on high cost IMUs and/or dual antenna GNSS) [
6,
7].
As regards the other angles (
Figure 4b,c), for increasing angular separation pitch accuracy decreases while the roll accuracy increases. These effects are due to the varying angles between unit vectors and the coordinate axes.
In particular, effects on pitch are limited for the considered range of angular separations, while a much larger effect is present for roll. These effects would further increase if the angular separation approached 180°. The considered geometry, especially for small angular separation, is optimal for pitch estimation. However, the final pitch accuracy does not reach the heading one due to the fact that it (only) depends on the (larger) GPS vertical error.
Case 2 (
Figure 4) highlights the effects of non-horizontal formation geometry. Compared with Case 1, it is clear how heading accuracy decreases due to the non-optimal observation geometry (smaller angles between unit vectors and third body axis). Instead, pitch and roll estimates are positively influenced by the non-null elevation angle. In particular, pitch estimate takes advantage from depending not only on the vertical GPS error, but also on the smaller horizontal component. Instead, benefits for roll mainly derive from the increased angles among unit vectors and the first body axis. Deputy separation does not influence significantly pitch accuracy, while its increase is beneficial for both heading and roll angles. In this case, among the three angles, pitch has the highest accuracy.
As regards Case 3 (
Figure 4), this asymmetric geometry does not impact significantly heading accuracy, which is very similar to Case 1 and thus very weakly influenced by deputy separation. Instead, both pitch and roll errors are positively impacted by increasing separation, due to the fact that one of the unit vectors tends to be normal to the first or second body axis, as ∆ε approaches 90°. In fact, the latter geometry represents an optimal compromise in terms of accuracy for all the three angles, which represents a well known result exploited in designing single vehicle multi-antenna GPS configurations [
29,
30,
31]. For example, at 100 m baseline we have an error standard deviation of 0.4° for heading, and of 1° for roll and pitch.
In summary, these budgets show that even the relatively coarse code-based DGPS processing is very promising in terms of attitude estimation, when combined with vision-based sensing. In particular, horizontal geometries provide a very fine heading accuracy even at relatively short baselines, while asymmetries can be useful to find a balance between roll and pitch errors. In practical cases, the choice of formation geometries will depend on the requirements for final navigation performance (sensor fusion output) and on eventual constraints deriving from the flight environment. Also, formation reconfiguration strategies can be envisaged to keep required levels of attitude estimation performance.





























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}