
A Small Leak Detection Method Based on VMD Adaptive De-Noising and Ambiguity Correlation Classification Intended for Natural Gas Pipelines


Abstract
:1. Introduction
2. VMD Adaptive De-Noising Method
2.1. Variational Mode Decomposition
- (1)
- Initialize , , , and . is the Lagrange multiplier, represents components set after decomposition, and represents the center frequencies set of components after decomposition.
- (2)
- , execute the whole loop.
- (3)
- Execute innermost loop, , and are renewed according to and :where is the penalty parameter, represents the signal, and real part of conducting Fourier inversion is .
- (4)
- Renew according to for .where is the update parameter of the Lagrangian multiplier.
- (5)
- If , end the whole loop, output the modal components , otherwise, repeat steps from Equation (2) to Equation (4).
2.2. VMD-Based Noise Adaptive Removal Approach
- (1)
- For any data , calculate its PDF :where presents the Gaussian kernels function and is the bandwidth. To prevent overlarge of variance and deviation is often determined 0.15 times of the prediction confidence interval of variable x.
- (2)
- Calculate PDFs of the original signal and component after VMD:where and are PDFs, and is the number of decomposed components.
- (3)
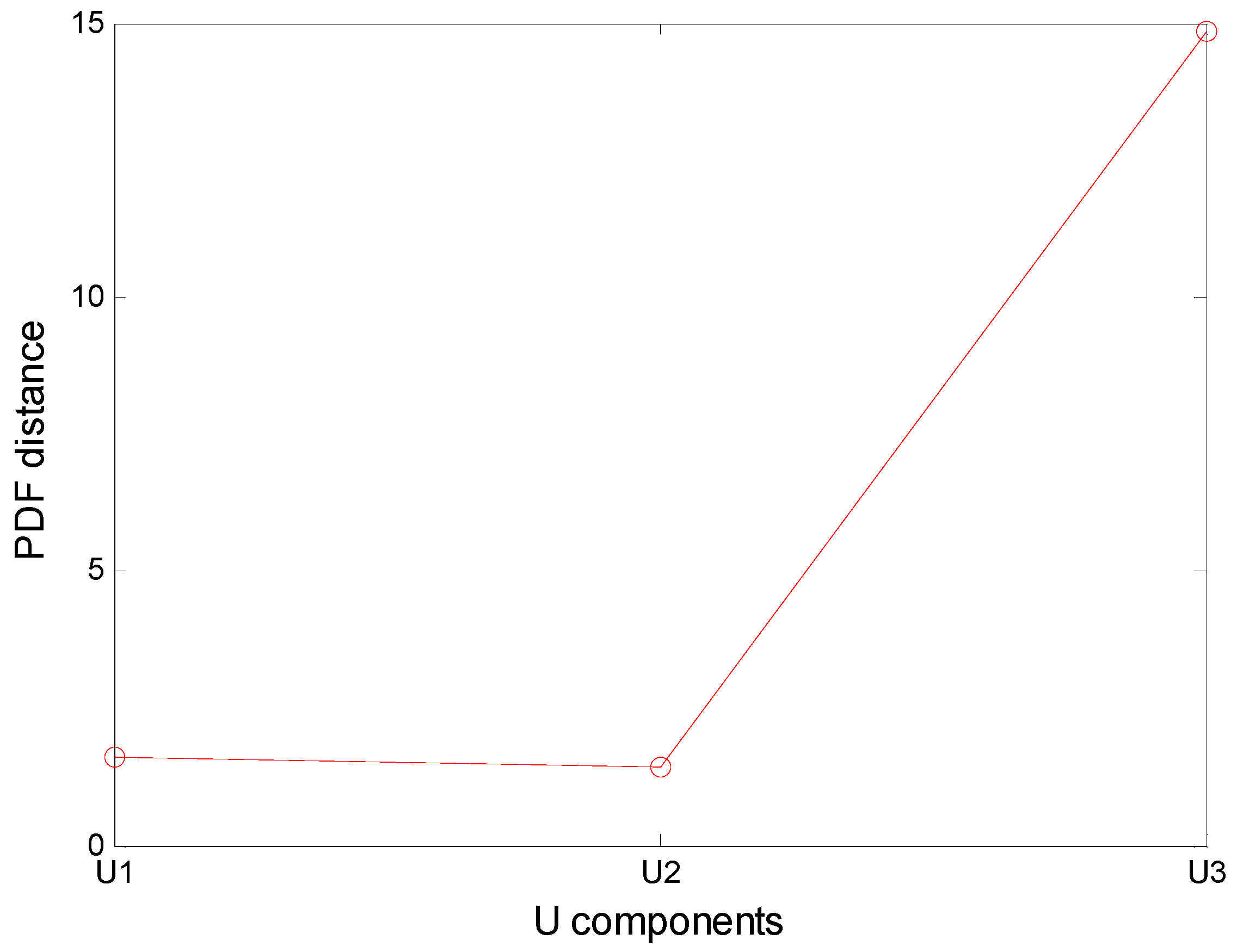
- Calculate distance () between two PDFs:
- (4)
- Choose noiseless component according to the distance:
2.3. Algorithm Simulation
3. Ambiguity Correlation Classifier
3.1. Ambiguity Correlation Theory
- (1)
- Calculate ambiguity function of signal x(t):where is the autocorrelation function of signals, is the ambiguity function of signal x(t).
- (2)
- Calculate the correlation function of ambiguity function images of signals x(t) and y(t):In Equation (16), is the correlation function.
- (3)
- Calculate normalized correlation coefficient :
- (4)
- Select correlation coefficient when τ = 0 or θ = 0:
- (5)
- Calculate the ambiguity correlation coefficient :
3.2. Basic Principle of Classifier
4. Small Leak Detection Method
- (1)
- Collect experimental data by sensors and get series of U components of collected data from VMD.
- (2)
- Select noiseless components according to VMD adaptive de-noising method.
- (3)
- Reconstruct chosen noiseless components and input using the ACC.
- (4)
- Collect several groups of data for training and testing, and realize the pipeline small leak detection.
5. Experimental Results and Analysis
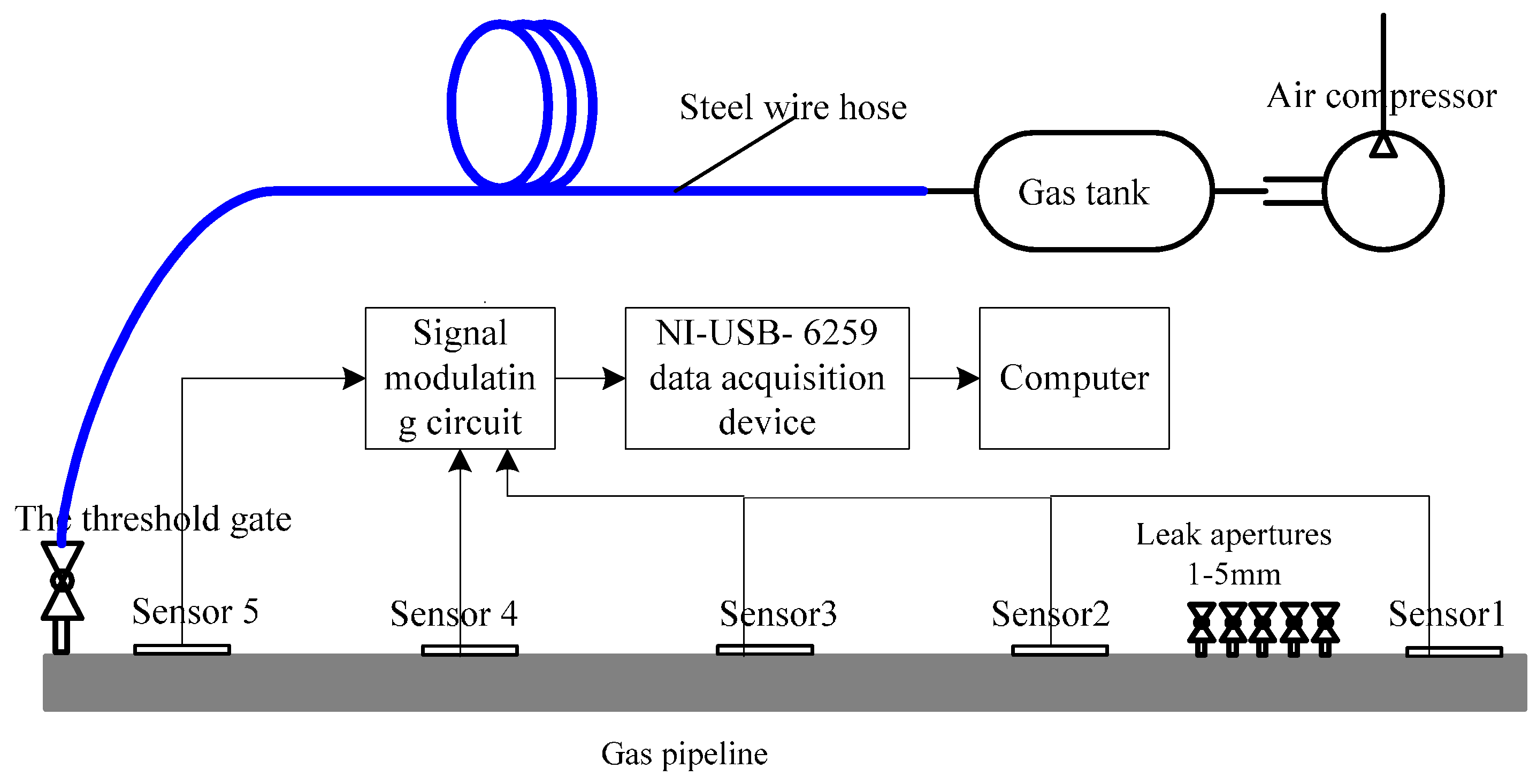
5.1. Experimental Apparatus and Instrumentations
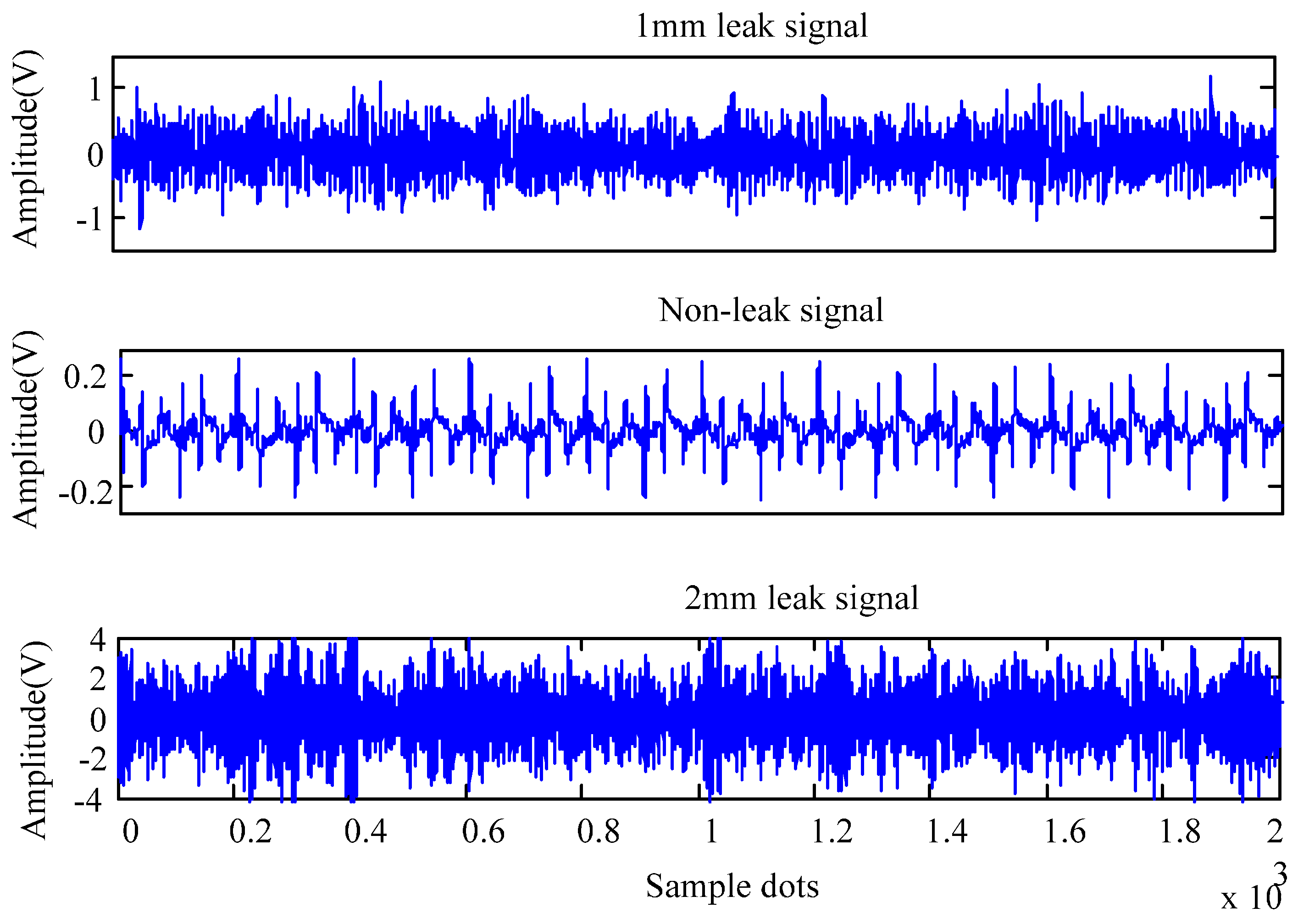
5.2. Acoustic Emission Signal De-Noising
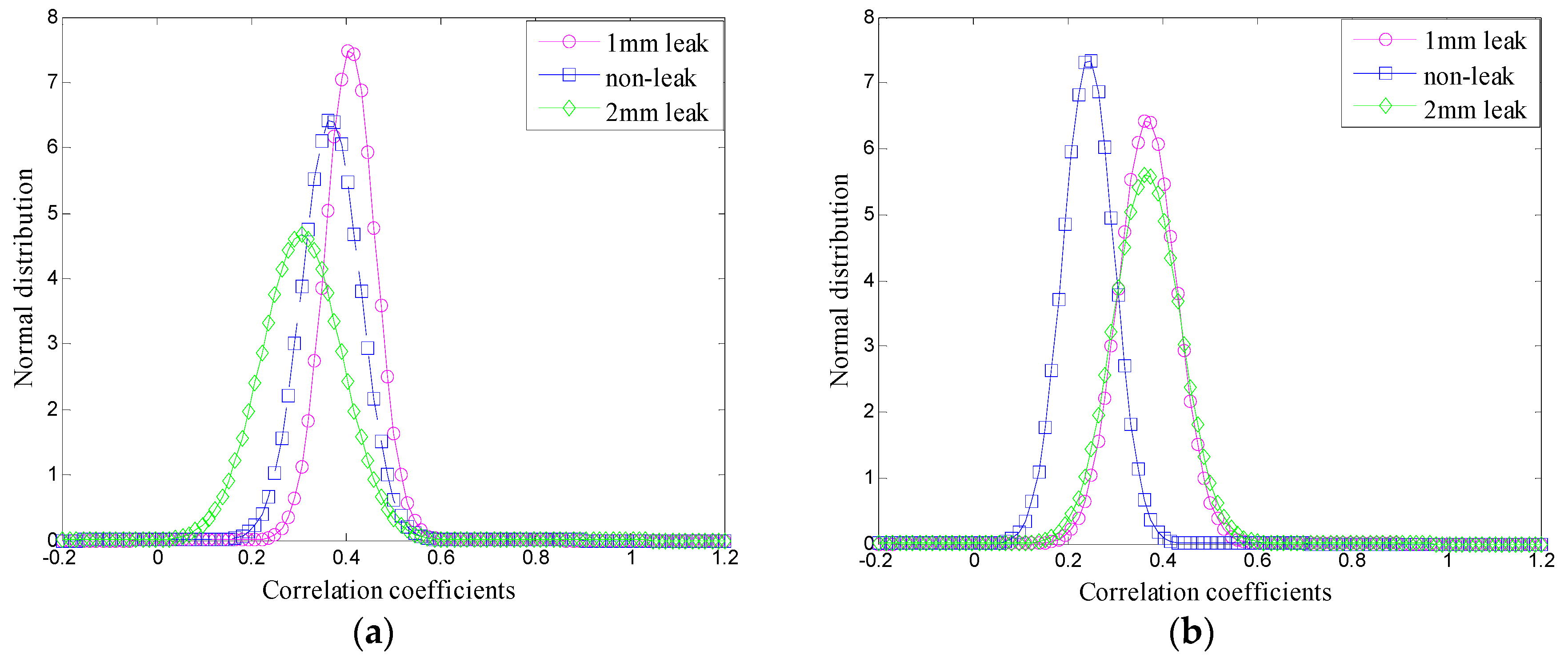
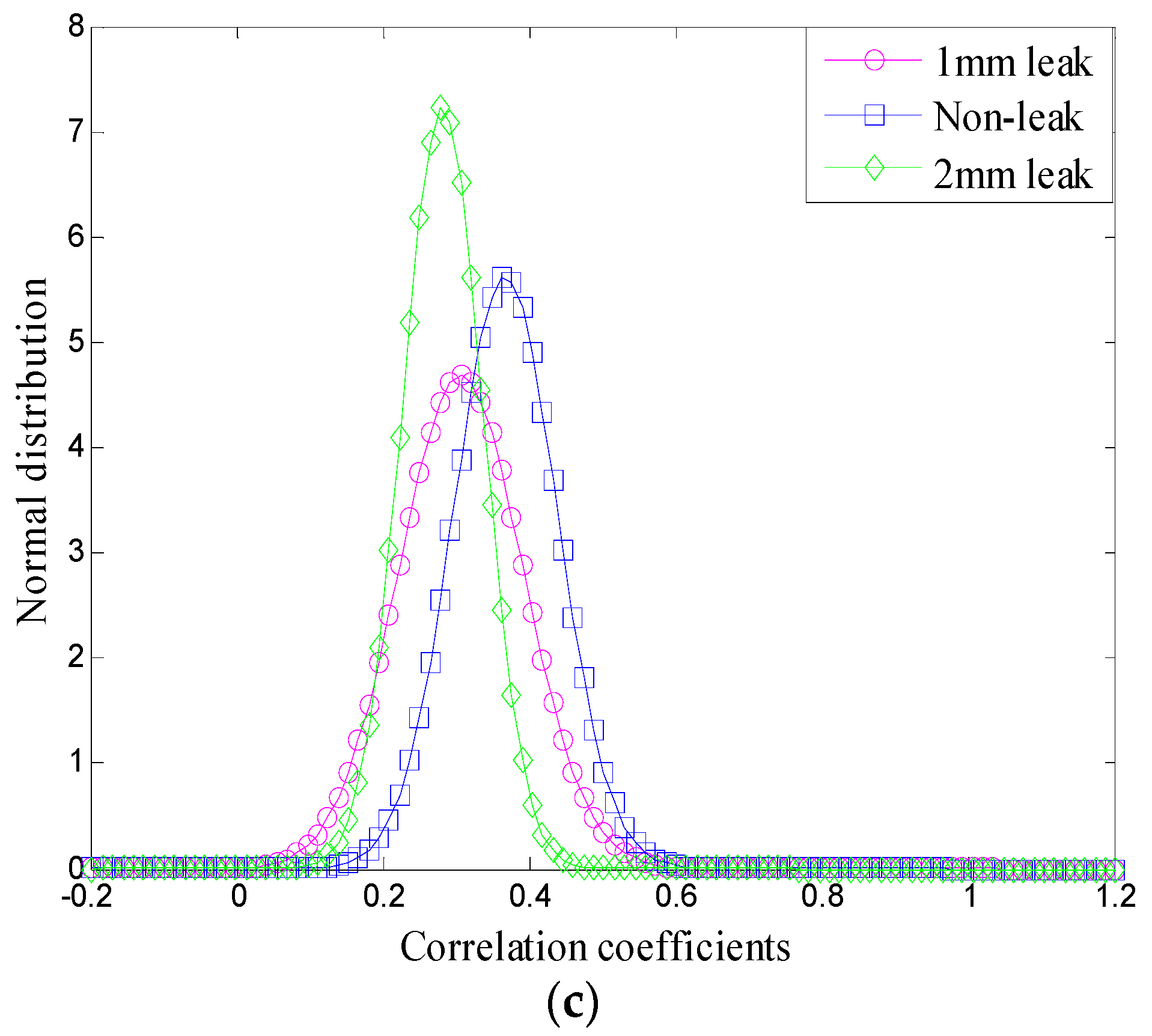
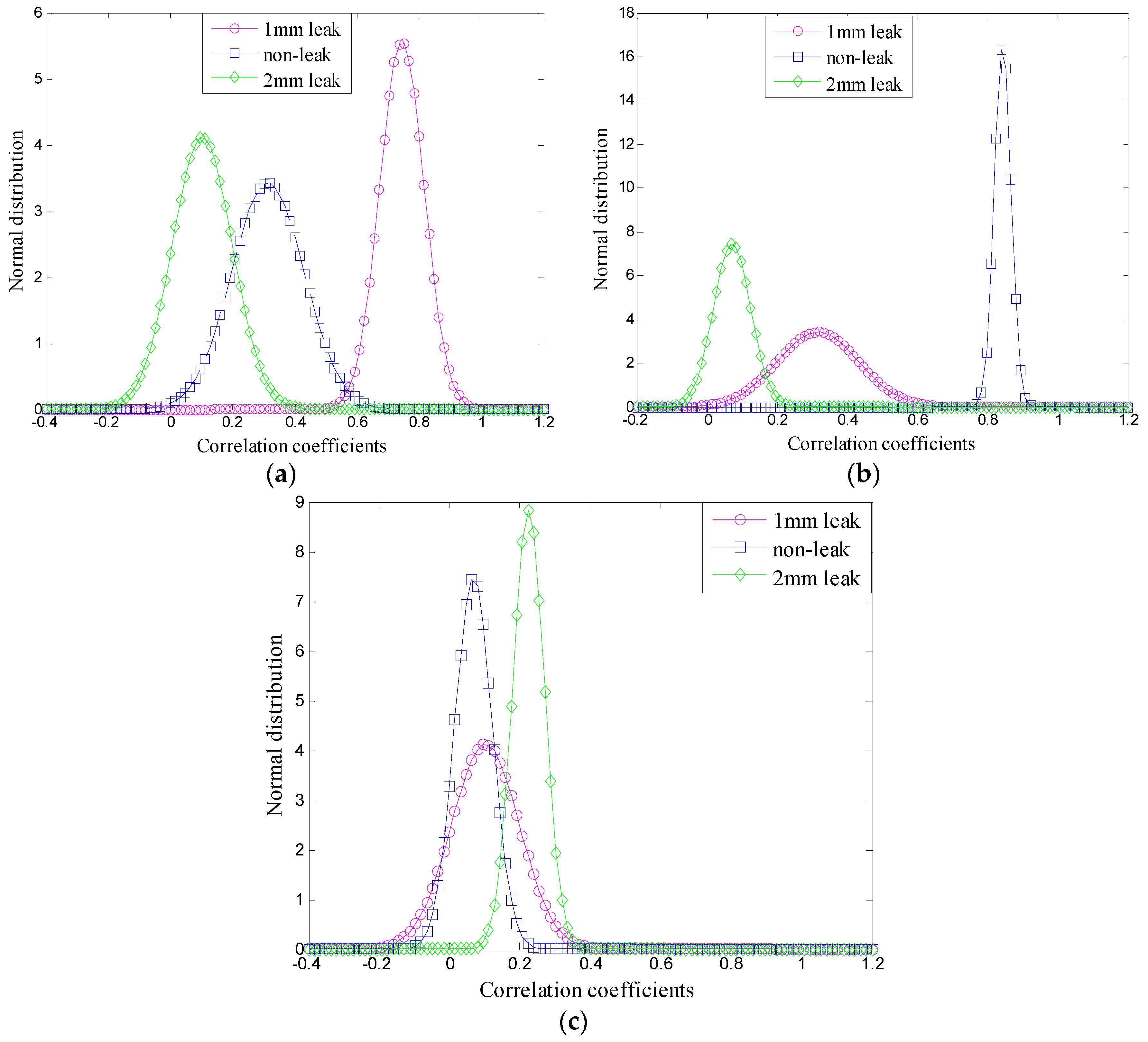
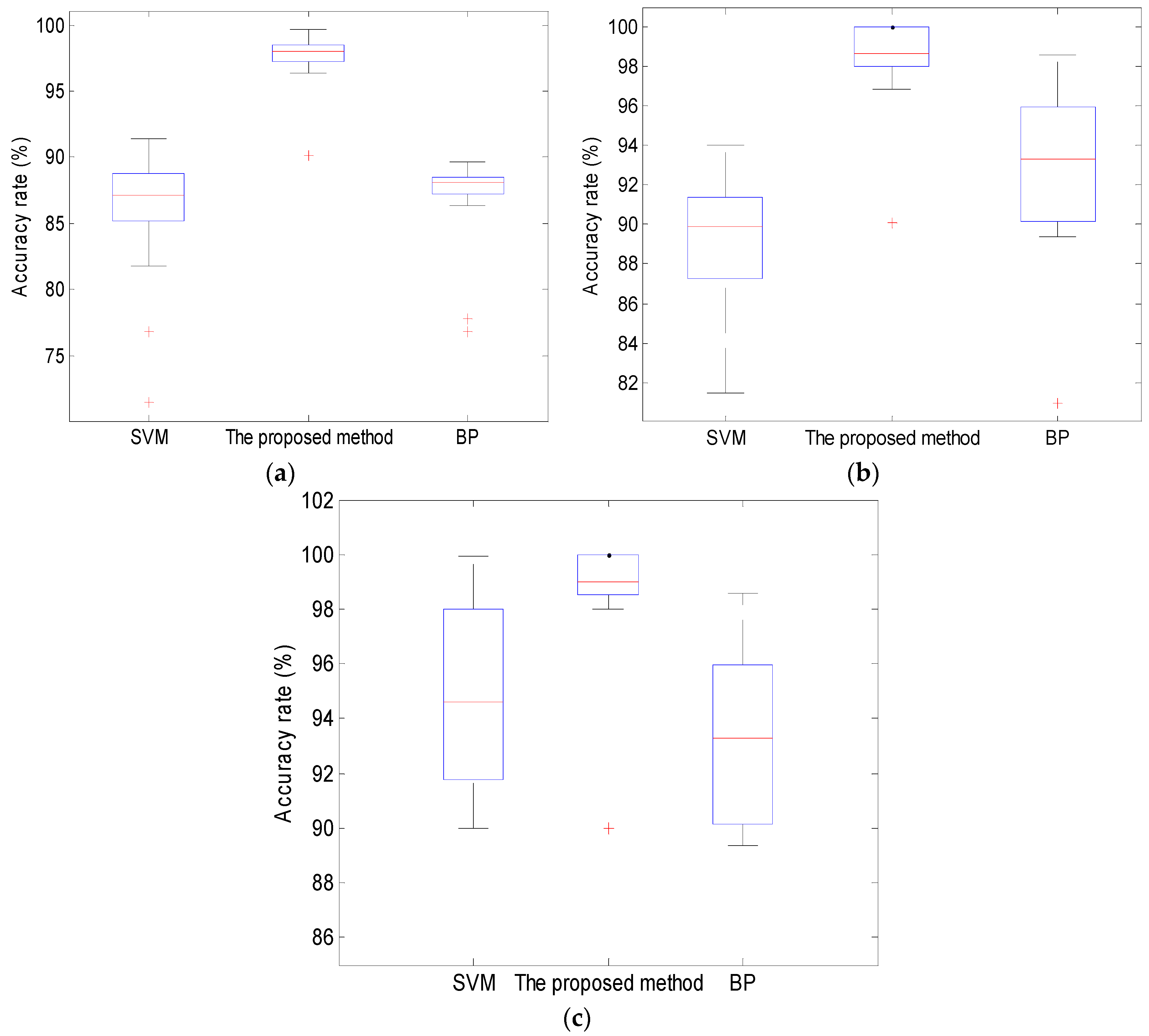
5.3. Small Leakage Detection with ACC
5.4. Discussion
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Murvay, P.S.; Silea, I. A survey on gas leak detection and localization techniques. J. Loss Prev. Process 2012, 25, 966–973. [Google Scholar] [CrossRef]
- Bian, X.; Li, Y.; Feng, H.; Wang, J.; Qi, L.; Jin, S. A Location Method Using Sensor Arrays for Continuous Gas Leakage in Integrally Stiffened Plates Based on the Acoustic Characteristics of the Stiffener. Sensors 2015, 15, 24644–24661. [Google Scholar] [CrossRef] [PubMed]
- Sun, J.; Xiao, Q.; Wen, J.; Zhang, Y. Natural gas leak location with K–L divergence-based adaptive selection of Ensemble Local Mean Decomposition components and high-order ambiguity function. J. Sound Vib. 2015, 347, 232–245. [Google Scholar] [CrossRef]
- Qu, Z.; Zhou, Y.; Zeng, Z.; Feng, H.; Zhang, Y.; Jin, S. Detection of the abnormal events along the oil and gas pipeline and multi-scale chaotic character analysis of the detected signals. Meas. Sci. Technol. 2008, 19, 025301. [Google Scholar] [CrossRef]
- Sun, J.; Wen, J. Target location method for pipeline pre-warning system based on HHT and time difference of arrival. Measurement 2013, 46, 2716–2725. [Google Scholar] [CrossRef]
- Jin, H.; Zhang, L.; Liang, W.; Ding, Q. Integrated leakage detection and localization model for gas pipelines based on the acoustic wave method. J. Loss Prev. Process 2014, 27, 74–88. [Google Scholar] [CrossRef]
- Yen, C.L.; Lu, M.C.; Chen, J.L. Applying the self-organization feature map (SOM) algorithm to AE-based tool wear monitoring in micro-cutting. Mech. Syst. Signal Process. 2013, 34, 353–366. [Google Scholar] [CrossRef]
- Bin, G.F.; Gao, J.J.; Li, X.J.; Dhillon, B.S. Early fault diagnosis of rotating machinery based on wavelet packets—Empirical mode decomposition feature extraction and neural network. Mech. Syst. Signal Process. 2012, 27, 696–711. [Google Scholar] [CrossRef]
- Bian, X.; Zhang, Y.; Li, Y.; Gong, X.; Jin, S. A new method of using sensor arrays for gas leakage location based on correlation of the time-space domain of continuous ultrasound. Sensors 2015, 15, 8266–8283. [Google Scholar] [CrossRef] [PubMed]
- Davoodi, S.; Mostafapour, A. Gas leak locating in steel pipe using wavelet transform and cross-correlation method. Int. J. Adv. Manuf. Technol. 2014, 70, 1125–1135. [Google Scholar] [CrossRef]
- Basu, J.; RoyChaudhuri, C. Graphemes Nanogrids FET Immunosensor: Signal to Noise Ratio Enhancement. Sensors 2016, 16, 1481. [Google Scholar] [CrossRef] [PubMed]
- Chen, S.W.; Chen, Y.H. Hardware design and implementation of a wavelet de-noising procedure for medical signal processing. Sensors 2015, 15, 26396–26414. [Google Scholar] [CrossRef] [PubMed]
- Zhong, J.H.; Wong, P.K.; Yang, Z.X. Simultaneous-Fault Diagnosis of Gearboxes Using Probabilistic Committee Machine. Sensors 2016, 16, 185. [Google Scholar] [CrossRef] [PubMed]
- Nguyen, P.; Kang, M.; Kim, J.M.; Ahn, B.H.; Ha, J.M.; Choi, B.K. Robust condition monitoring of rolling element bearings using de-noising and envelope analysis with signal decomposition techniques. Expert Syst. Appl. 2015, 42, 9024–9032. [Google Scholar] [CrossRef]
- Lei, Y.; Li, N.; Lin, J.; Wang, S. Fault diagnosis of rotating machinery based on an adaptive ensemble empirical mode decomposition. Sensors 2013, 13, 16950–16964. [Google Scholar] [CrossRef] [PubMed]
- Dragomiretskiy, K.; Zosso, D. Variational mode decomposition. IEEE Trans. Signal Process. 2014, 62, 531–544. [Google Scholar] [CrossRef]
- Yin, A.; Ren, H. A propagating mode extraction algorithm for microwave waveguide using variational mode decomposition. Meas. Sci. Technol. 2015, 26, 095009. [Google Scholar] [CrossRef]
- Yan, J.; Hong, H.; Zhao, H.; Li, Y.; Gu, C.; Zhu, X. Through-Wall Multiple Targets Vital Signs Tracking Based on VMD algorithm. Sensors 2016, 16, 1293. [Google Scholar] [CrossRef] [PubMed]
- Wang, Y.; Markert, R.; Xiang, J.; Zheng, W. Research on variational mode decomposition and its application in detecting rub-impact fault of the rotor system. Mech. Syst. Signal Process. 2015, 60, 243–251. [Google Scholar] [CrossRef]
- Riahi, M.; Shamekh, H.; Khosrowzadeh, B. Differentiation of leakage and corrosion signals in acoustic emission testing of aboveground storage tank floors with artificial neural networks. Russ. J. Nondestruct. Test. 2008, 44, 436–441. [Google Scholar] [CrossRef]
- Qu, Z.; Feng, H.; Zeng, Z.; Zhuge, J.; Jin, S. A SVM-based pipeline leakage detection and pre-warning system. Measurement 2010, 43, 513–519. [Google Scholar] [CrossRef]
- Zhang, F.; Liu, Y.; Chen, C.; Li, Y.F.; Huang, H.Z. Fault diagnosis of rotating machinery based on kernel density estimation and Kullback-Leibler divergence. J. Mech. Sci. Technol. 2014, 28, 4441–4454. [Google Scholar] [CrossRef]
- Kutyniok, G. Ambiguity functions, Wigner distributions and Cohen’s class for LCA groups. J. Math. Anal. Appl. 2003, 277, 589–608. [Google Scholar] [CrossRef]
- Zhao, L.; Yin, A. High-order partial differential equation de-noising method for vibration signal. Math. Method Appl. Sci. 2015, 38, 937–947. [Google Scholar] [CrossRef]
- Sun, H.; Zi, Y.; He, Z. Wind turbine fault detection using multi-wavelet de-noising with the data-driven block threshold. Appl. Acoust. 2014, 77, 122–129. [Google Scholar] [CrossRef]
- Kang, M.; Kim, J.; Kim, J.M. High-performance and energy-efficient fault diagnosis using effective envelope analysis and de-noising on a general-purpose graphics processing unit. IEEE Trans. Power Electron. 2015, 30, 2763–2776. [Google Scholar] [CrossRef]
- Komaty, A.; Boudraa, A.O.; Augier, B.; Daré-Emzivat, D. EMD-based filtering using similarity measure between probability density functions of IMFs. IEEE Trans. Instrum. Meas. 2014, 63, 27–34. [Google Scholar] [CrossRef]
- Li, R.; He, D. Rotational machine health monitoring and fault detection using EMD-based acoustic emission feature quantification. IEEE Trans. Instrum. Meas. 2012, 61, 990–1001. [Google Scholar] [CrossRef]
- Ye, J. Multicriteria decision-making method using the correlation coefficient under single-valued neutrosophic environment. Int. J. Gen. Syst. 2013, 42, 386–394. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Simulated Signals | MSE | SNR |
|---|---|---|---|
| Before de-noising | 0.0463 | 13.4451 | |
| VMD | After de-noising | 0.004 | 24.0253 |
| EMD | After de-noising | 0.0234 | 17.5643 |
| Data Group | 1# | 2# | 3# | |
|---|---|---|---|---|
| 1 mm Leak | Non-Leak | 2 mm Leak | ||
| 1 mm leak | mean value | 0.4074 | 0.3664 | 0.3042 |
| SD | 0.0530 | 0.0629 | 0.0969 | |
| Non-leak | mean value | 0.3664 | 0.2415 | 0.3650 |
| SD | 0.0629 | 0.0340 | 0.0534 | |
| 2 mm leak | mean value | 0.3042 | 0.3650 | 0.2789 |
| SD | 0.0969 | 0.0534 | 0.0452 | |
| Data Group | 1# | 2# | 3# | |
|---|---|---|---|---|
| 1 mm Leak | Non-Leak | 2 mm Leak | ||
| 1 mm leak | mean value | 0.7447 | 0.3134 | 0.1025 |
| SD | 0.0717 | 0.1164 | 0.0969 | |
| Non-leak | mean value | 0.3134 | 0.8407 | 0.0685 |
| SD | 0.1164 | 0.0240 | 0.0534 | |
| 2 mm leak | mean value | 0.1025 | 0.0685 | 0.2253 |
| SD | 0.0969 | 0.0534 | 0.0452 | |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xiao, Q.; Li, J.; Bai, Z.; Sun, J.; Zhou, N.; Zeng, Z. A Small Leak Detection Method Based on VMD Adaptive De-Noising and Ambiguity Correlation Classification Intended for Natural Gas Pipelines. Sensors 2016, 16, 2116. https://doi.org/10.3390/s16122116
Xiao Q, Li J, Bai Z, Sun J, Zhou N, Zeng Z. A Small Leak Detection Method Based on VMD Adaptive De-Noising and Ambiguity Correlation Classification Intended for Natural Gas Pipelines. Sensors. 2016; 16(12):2116. https://doi.org/10.3390/s16122116
Chicago/Turabian StyleXiao, Qiyang, Jian Li, Zhiliang Bai, Jiedi Sun, Nan Zhou, and Zhoumo Zeng. 2016. "A Small Leak Detection Method Based on VMD Adaptive De-Noising and Ambiguity Correlation Classification Intended for Natural Gas Pipelines" Sensors 16, no. 12: 2116. https://doi.org/10.3390/s16122116