An experiment was carried out using the data provided by the Yaogan-24 remote sensing satellite that was launched on 20 November 2014. The on-ground attitude data processing algorithm has been applied in the ground processing system in the China Resources Satellite Application Center.
3.1. Experimental Data
- (1)
Observation data of the Yaogan-24 remote sensing satellite
The Yaogan-24 remote sensing satellite’s original observation data used for experimental analysis mainly includes dual-frequency GPS original observations, original observations of Astro10 A and B, gyro observation data, line time data of imaging, and panchromatic image data. The data mentioned above were acquired during the satellite in orbit test.
- (2)
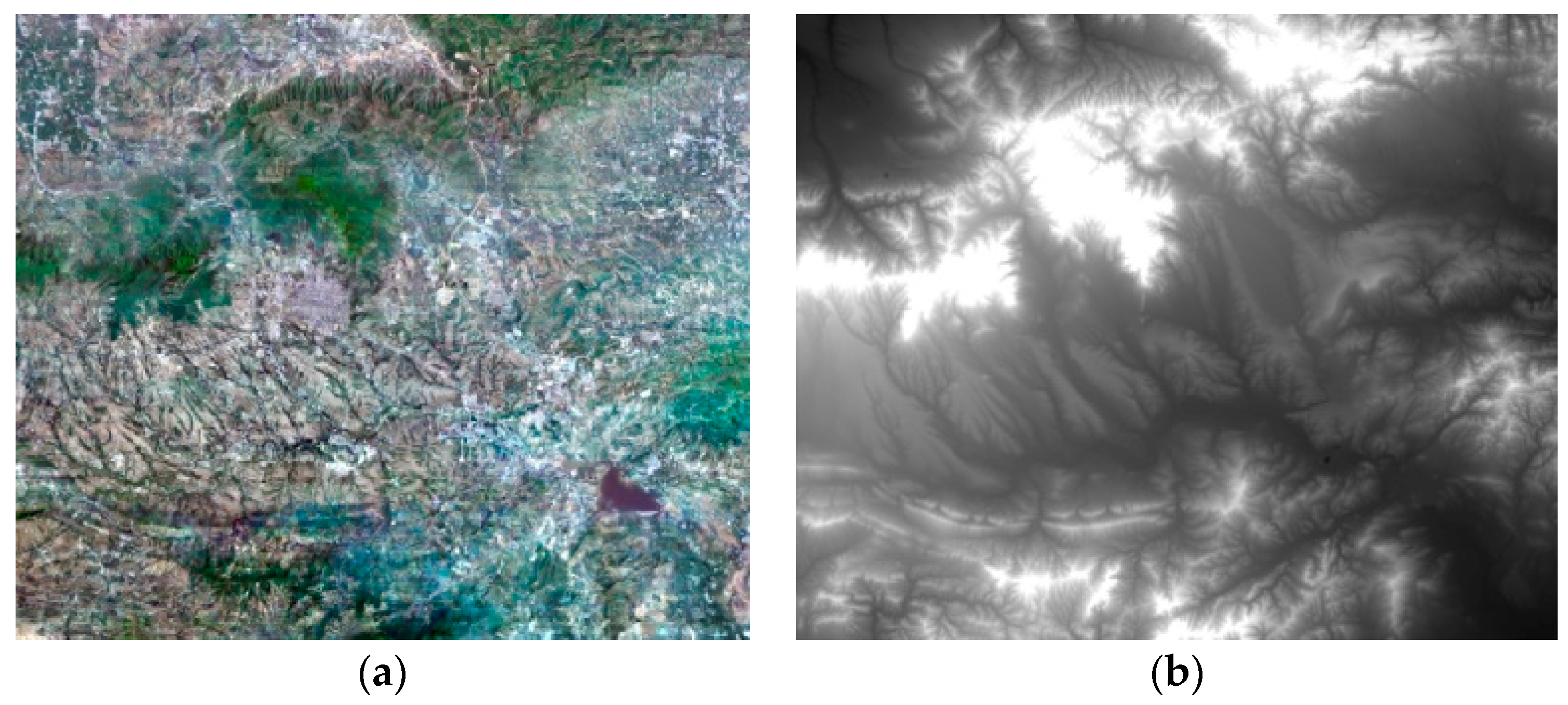
Geometric calibration field
The geometric calibration fields included Songshan, Anyang, Dongying, Sanya, Taiyuan, and Yili, all in China. In this paper, the Songshan and Anyang calibration fields were used. The Songshan field is located in Henan Province, central China, and features a hilly terrain, 112°42′–113°54′ E/34°13′–35°2′ N, coverage 100 × 80 = 8000 km
2, average altitude of approximately 500 m (the highest point is at 1491.73 m), and a maximum fluctuation ≤2000 m. The Songshan calibration field provides a region of 1:2000-scale digital orthophoto (DOM) and digital elevation model (DEM) reference data, in which the DOM ground GSD geometric resolution was 0.2 m, and the plane accuracy ≤1 m; the DEM geometry ground resolution was 1 m GSD, accuracy ≤2 m (
Figure 4).
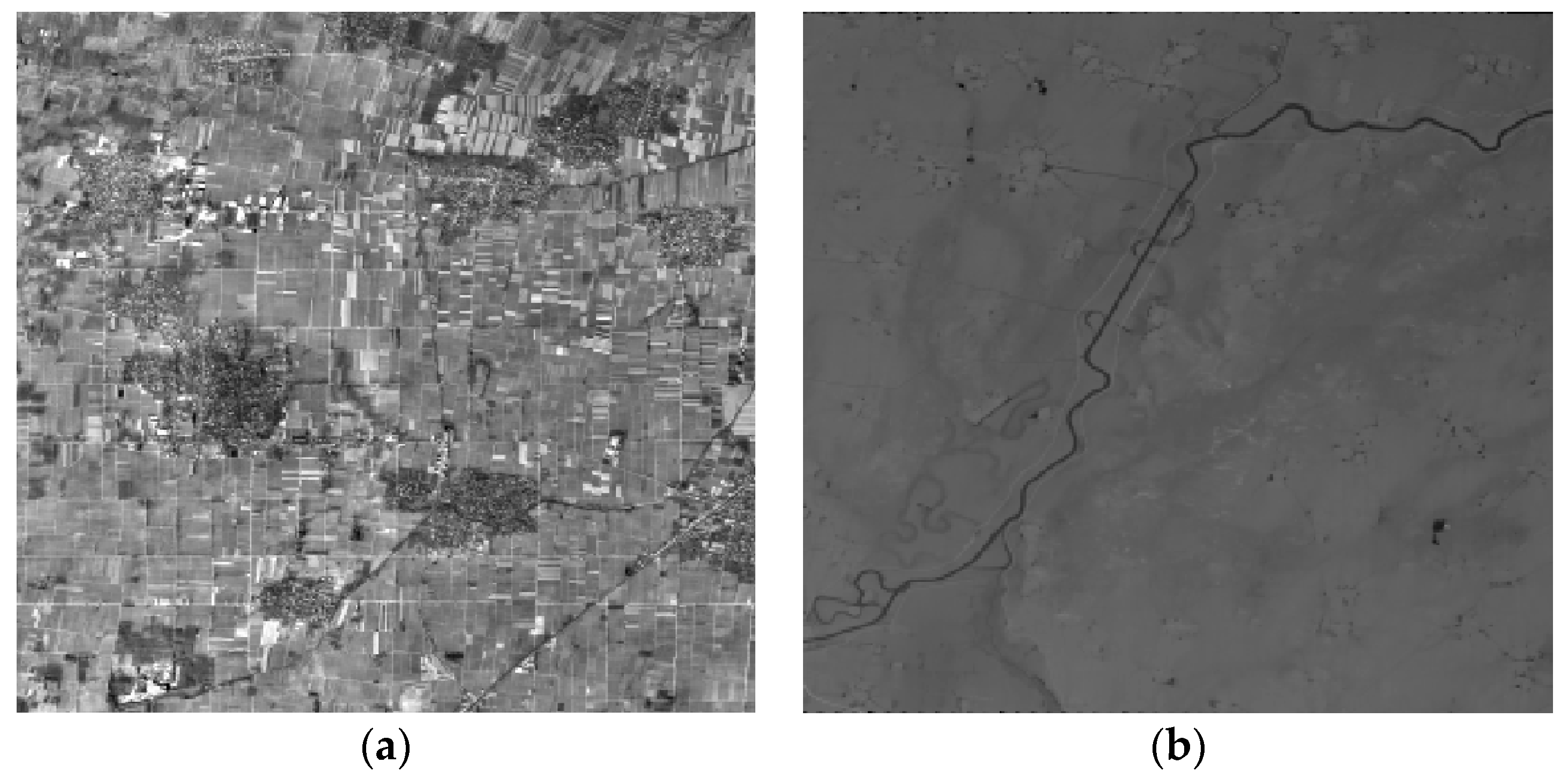
The Anyang field is also located in Henan Province, China, featuring a plain, 114°19′–115°12′ E/35°44′–36°1′ N, coverage 90 × 30 = 2700 km
2; average altitude approximately 40 m (the highest point is 70 m), and a maximum fluctuation ≤100 m. The field provides a region of 1:1000-scale DOM and DEM reference data, in which the DOM ground GSD geometric resolution was ≤0.1 m, and the plane accuracy ≤0.5 m; the DEM ground GSD geometric resolution was ≤0.5 m, accuracy ≤1 m (
Figure 5).
3.2. Experimental Results and Analysis
- (1)
Quality of the star sensor observation data
Star sensors are connected through a bracket and are vertically fixed. In theory, the angle between any two optical axes of the star sensor should be a constant. Therefore, we did a quality analysis on the original observation data using variation detection means of the optical axis angles. The general auxiliary data included only raw observations of the Astro10A and Astro10B star sensors, we focused on the raw data of the two sensors for our analysis.
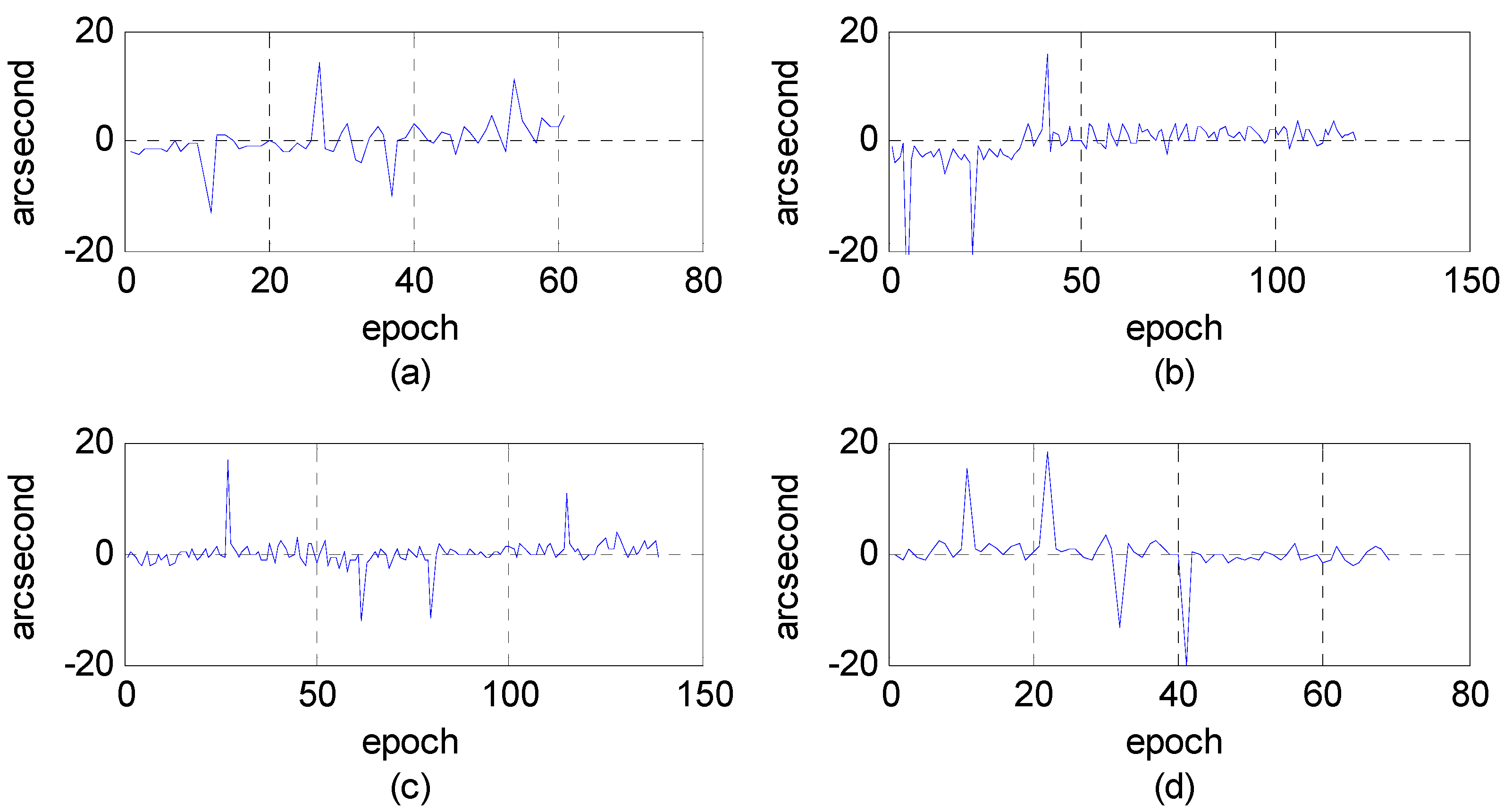
First, we analyzed the quality of the raw observations in the angle changes of the star sensors.
Figure 6 and
Figure 7 show the errors in the angle change before and after treatment. Because the measurement accuracy of the optical axis of Astro10 star sensor is ≤5 arcsec, according to the law of error propagation, the optical axis angle error of the star sensor would be ≤7 arcsec.
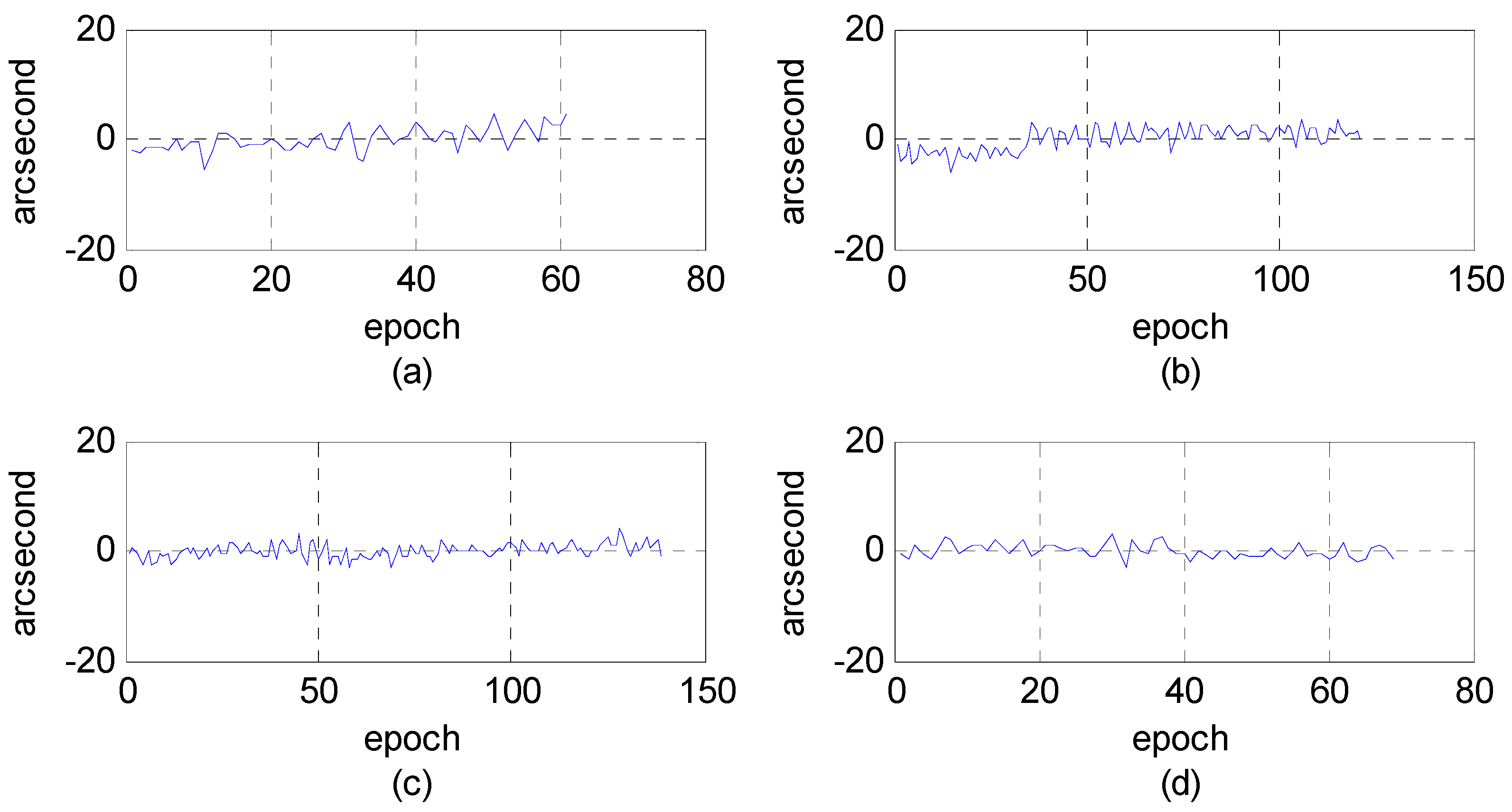
As
Figure 6 depicts, when a photo was taken in the Yili, Anyang, or Songshan calibration field, gross errors of 20–40 arcsec were presented in the observation data during some epochs that are much greater than the star sensor measurement accuracy. After being preprocessed in our algorithm, the gross errors were effectively corrected, and the optical axis angle error could satisfy the indicator (
Figure 7).
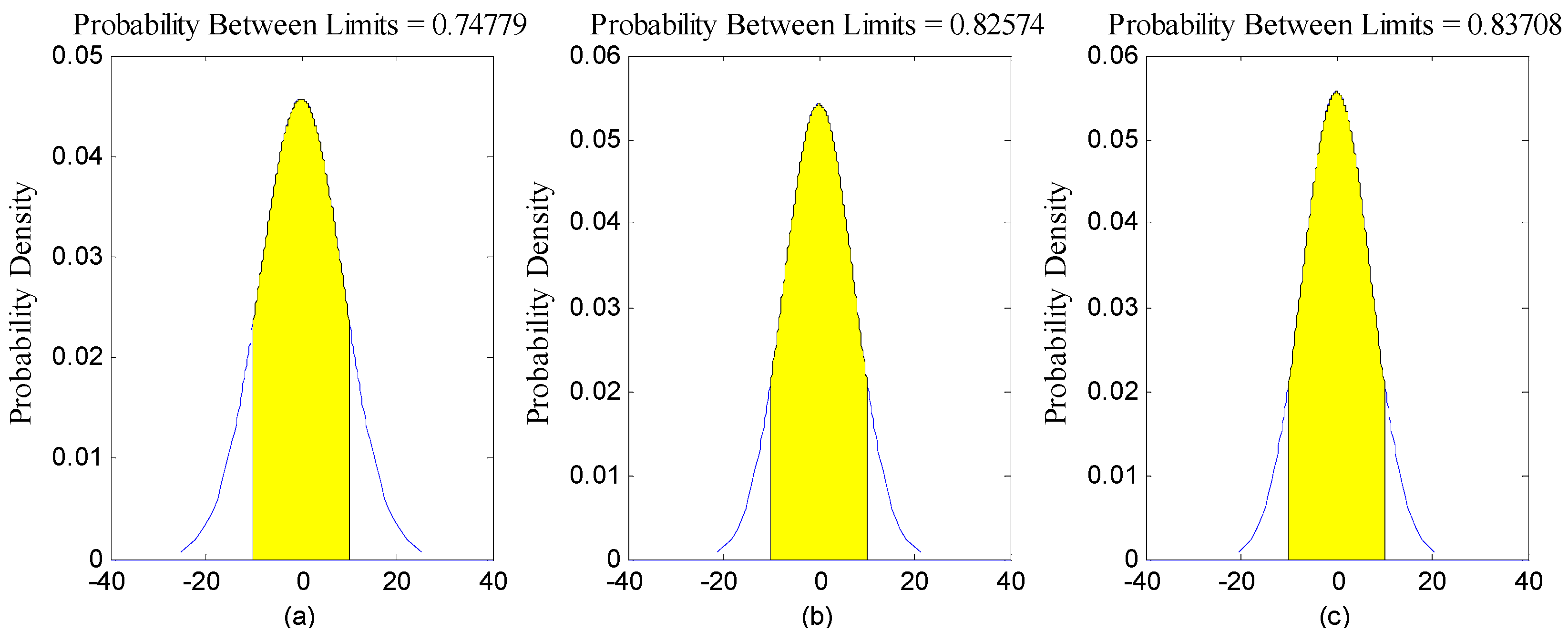
Figure 8 represents the distribution of the variations in star sensor optical axis angle error,
Table 2 represents the statistics of the optical axis angle error characteristic. As
Figure 8 and
Table 2 show, the error of the angle change followed a normal distribution. However, the gross errors in the observations did not exist, and the chance of a ±5 arcsec deviation appearing between the optical axes was 95%.
As described in
Section 2.6, we would further use those precise inversion attitude parameters as reference data to analyze the relative precision of the star sensor raw observation data.
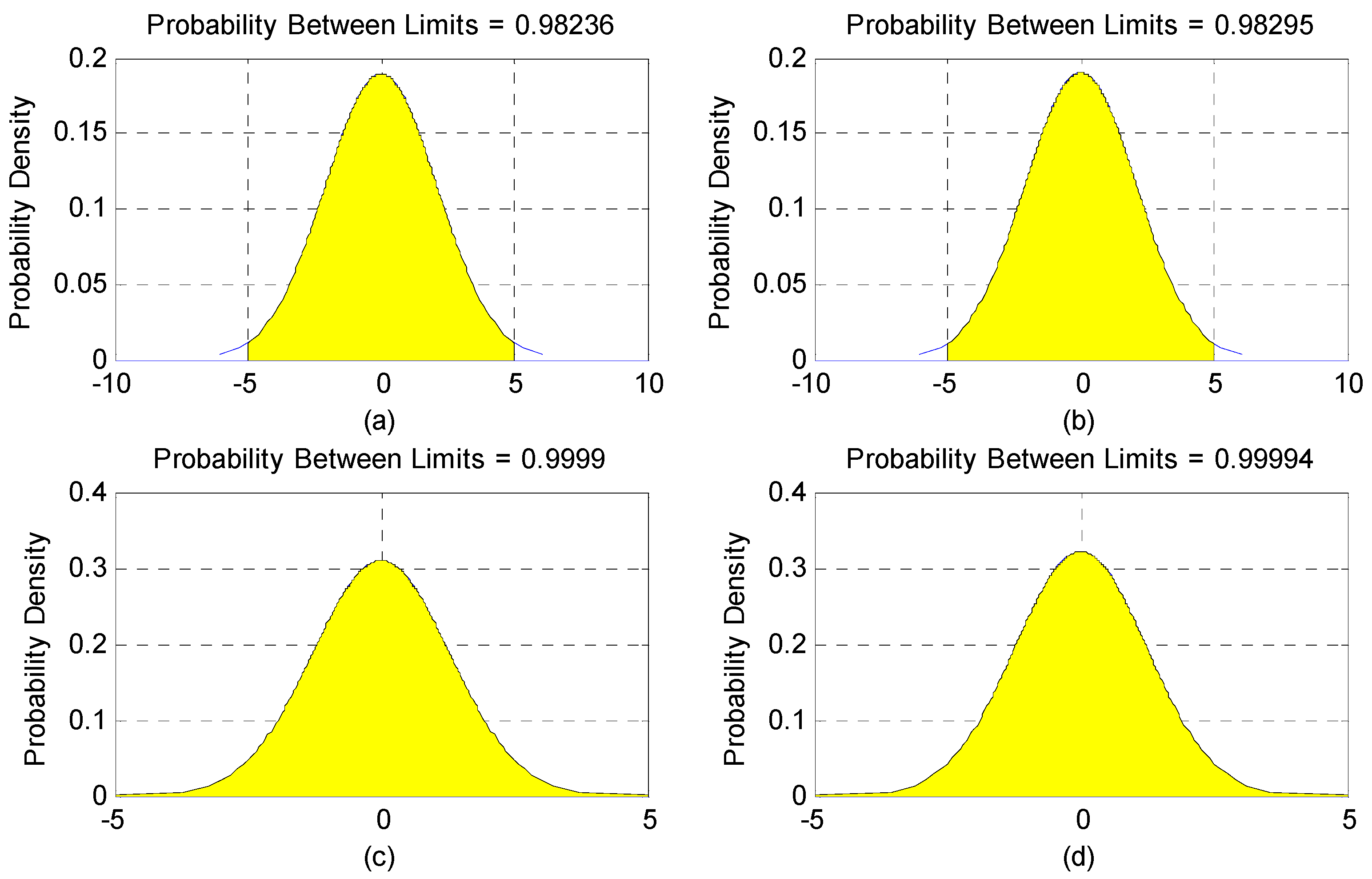
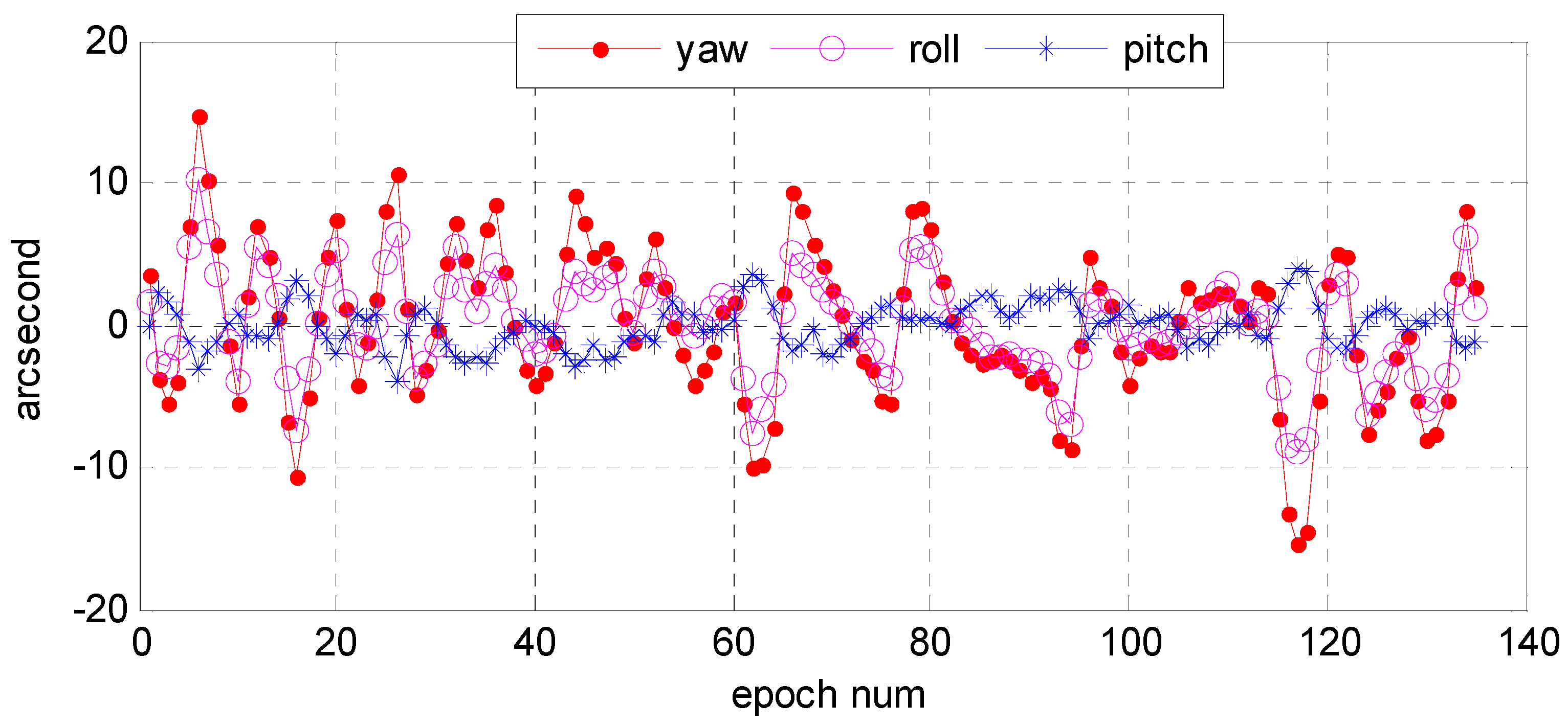
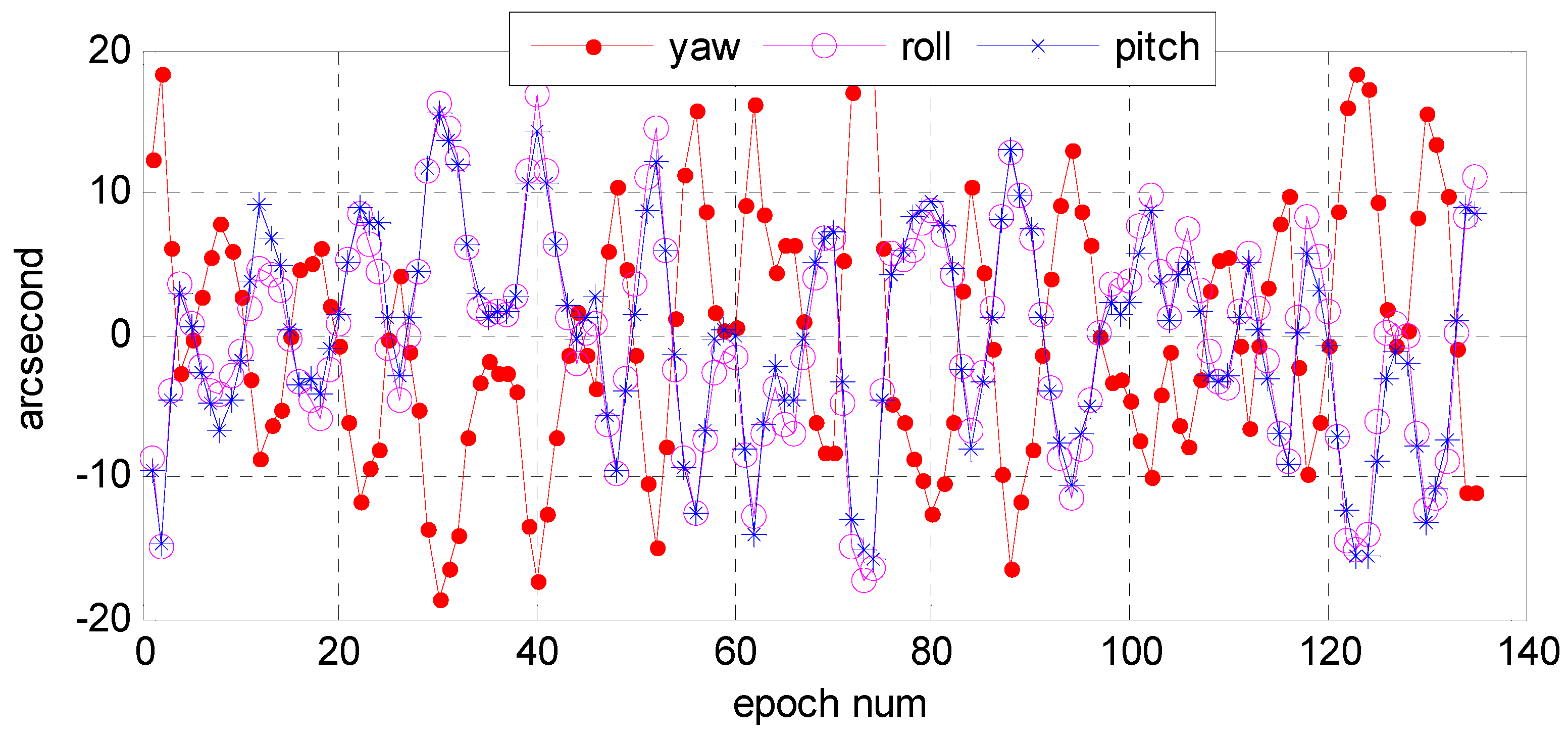
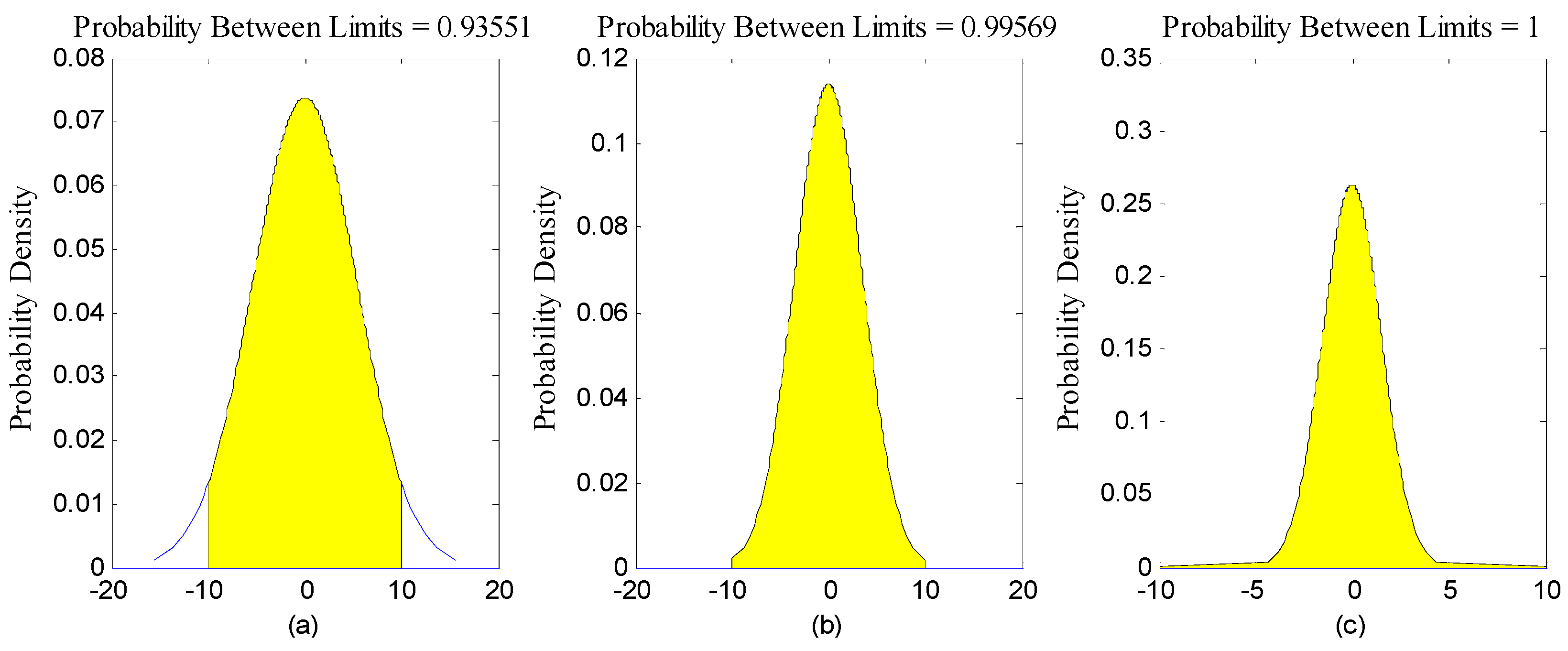
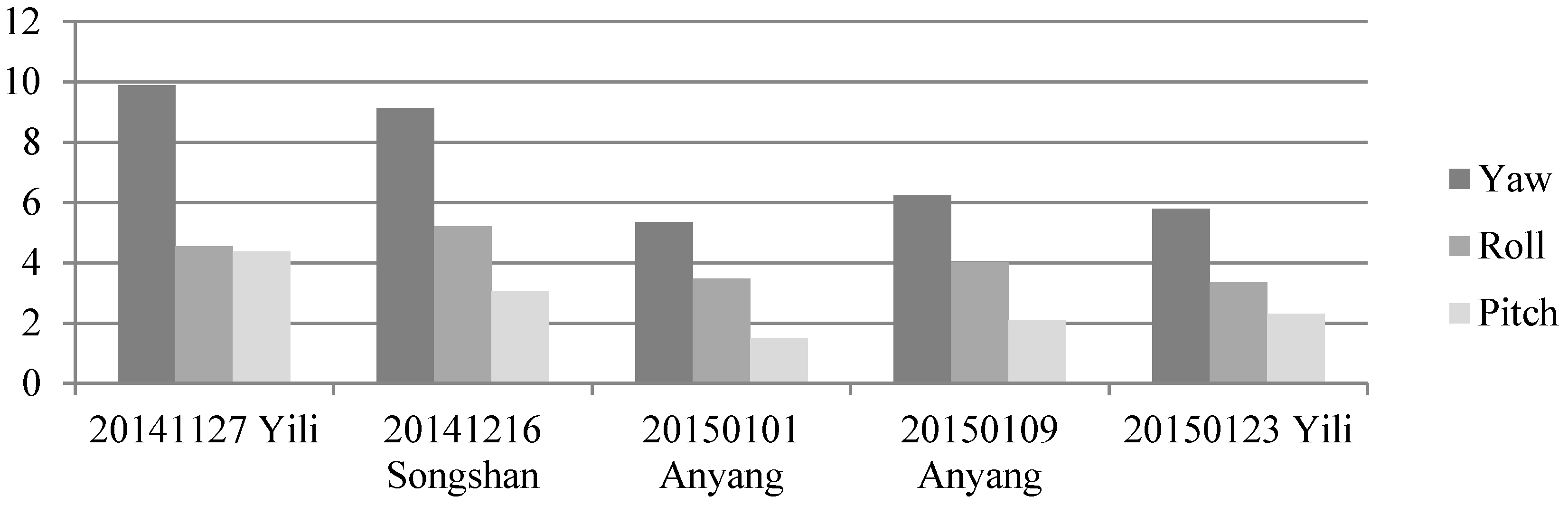
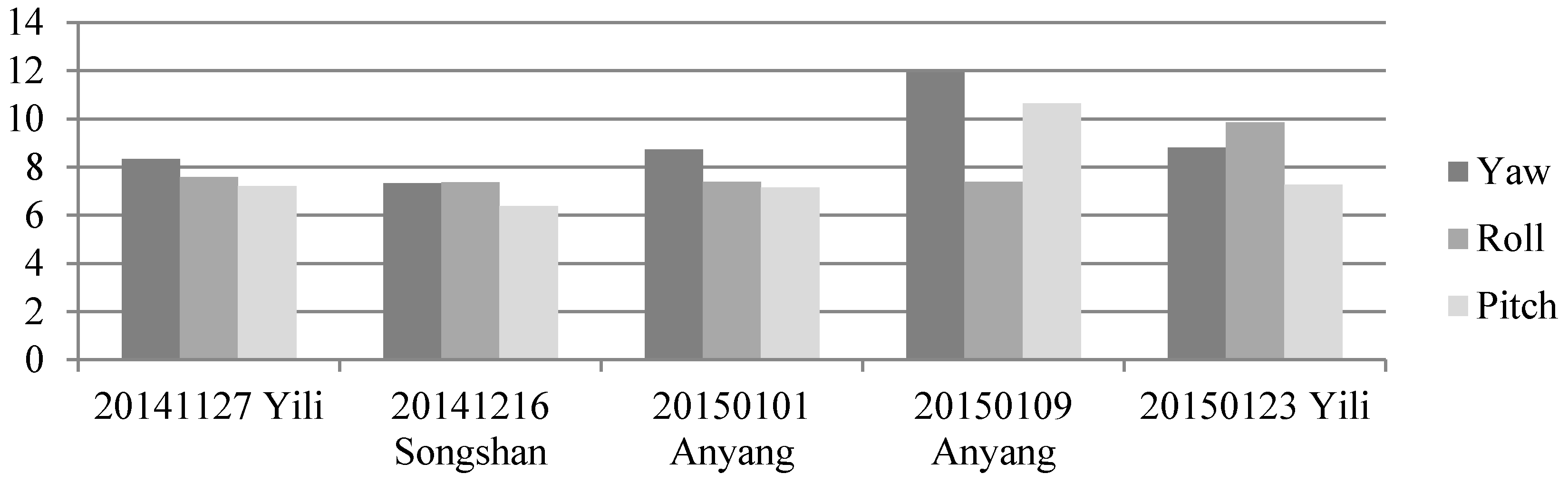
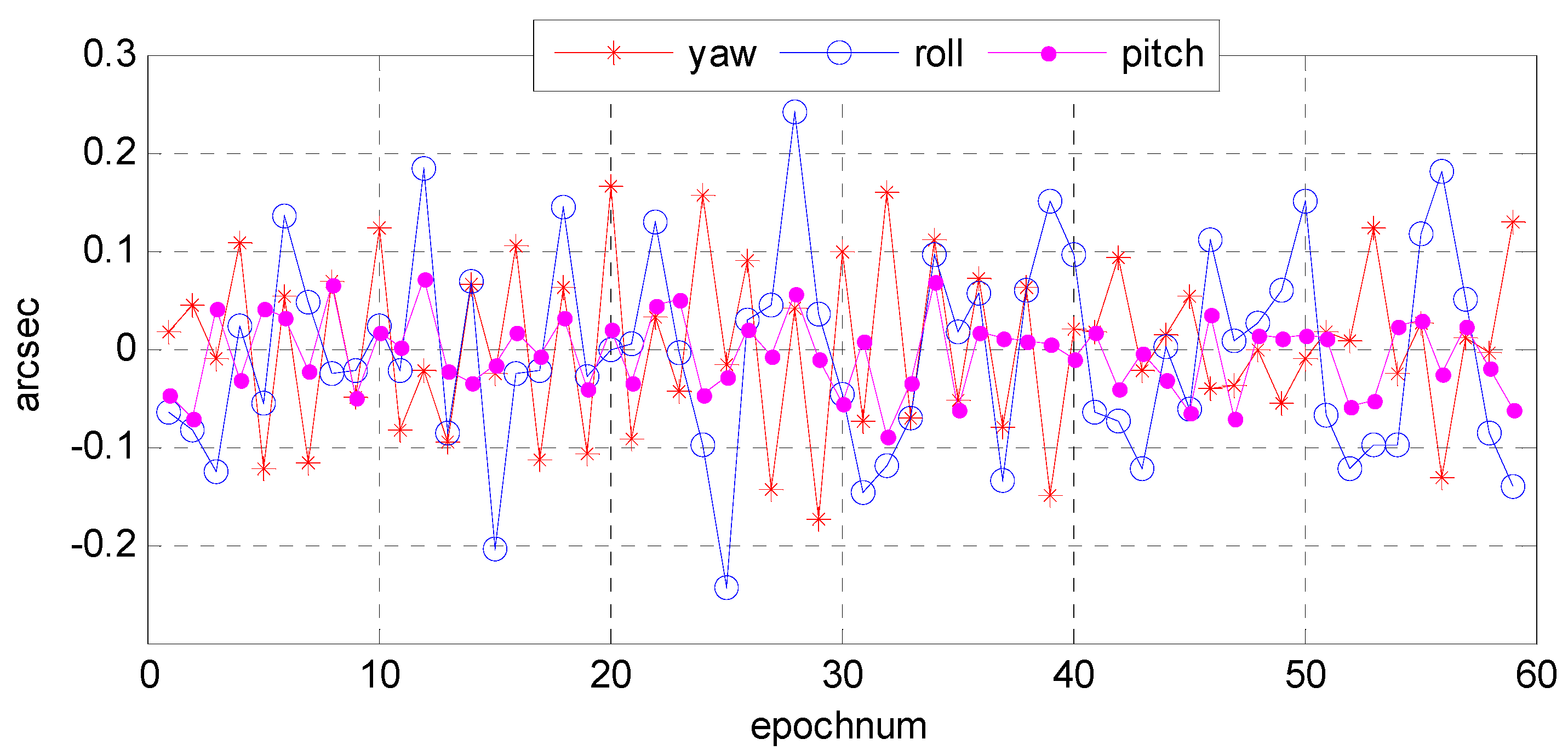
Figure 9 and
Figure 10 show, respectively, the error distributions in the Astro10A and Astro10B star sensors in the yaw, roll, and pitch directions. The maximum deviations in arcsec were −15–15 in yaw direction, −10–10 in roll direction, and −5–5 in pitch direction, while those of Astro10B were −15–20, −15–15, and −15–15 arcsec, respectively. This was because only the optical axis of star sensor could achieve the high pointing accuracy, the single star sensor attitude determination accuracy was limited and could not be directly used for attitude determination. In addition, the error distribution in the three directions of the two sensors were all normal in distribution (
Figure 11 and
Figure 12); and the relative precision of the measurements in the three directions were ≤12 arcsec (
Figure 13 and
Figure 14), which was consistent with the star sensor design accuracy of the optical axis error was ≤5″ (3σ) and horizontal axis error was ≤35″ (3σ). Therefore, the data quality of the star sensor observation used in our experiment will be reliable for other processes.
- (2)
Convergence and stability after bidirectional filtering
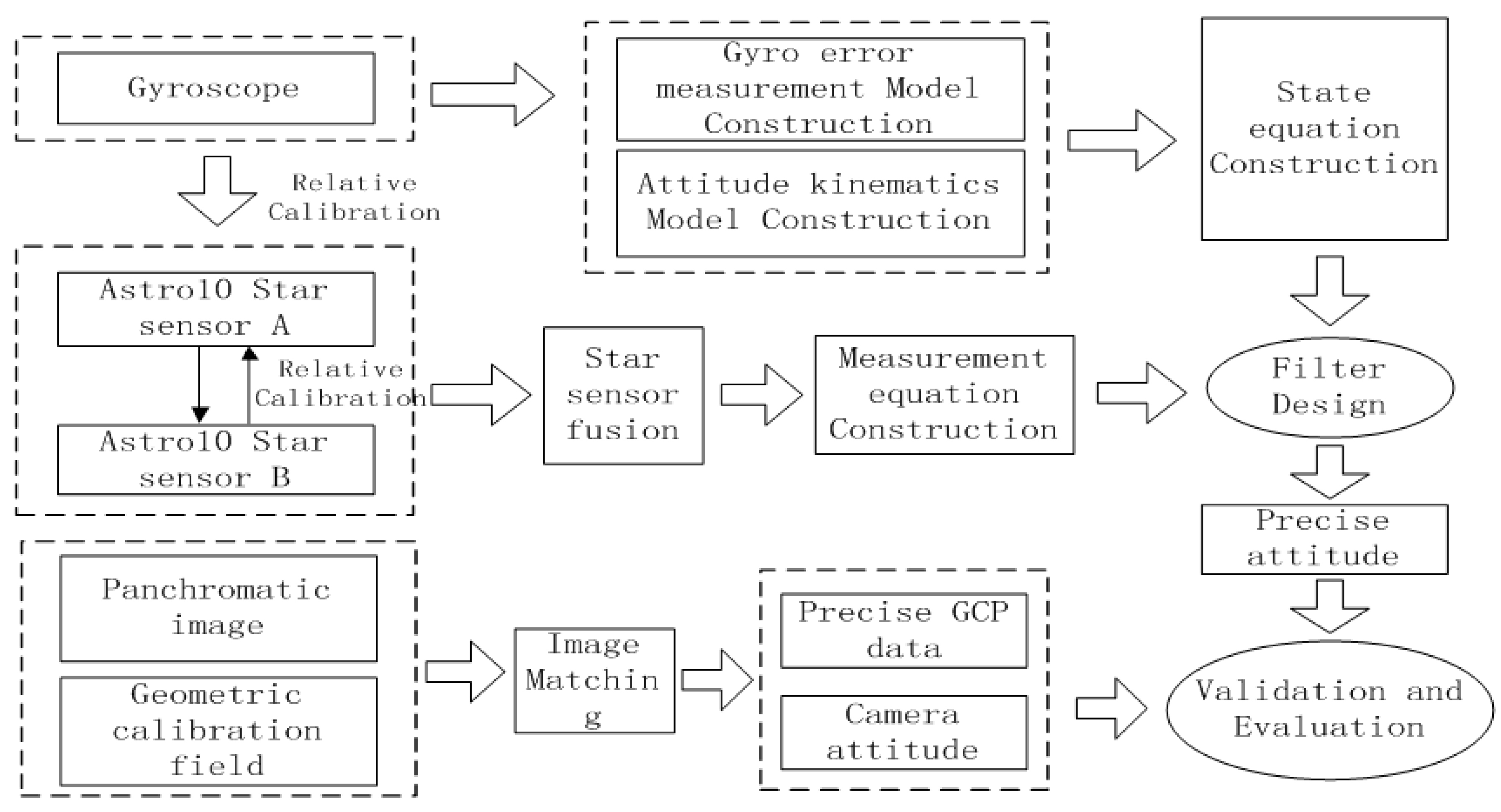
On the basis of the measurement and state equations, we used a bidirectional filter and overall weighted smoothing method to process the attitude data. Raw observational attitude data taken in the Anyang calibration field on 1 January 2015 were applied for data fusion, and the experimental results were analyzed.
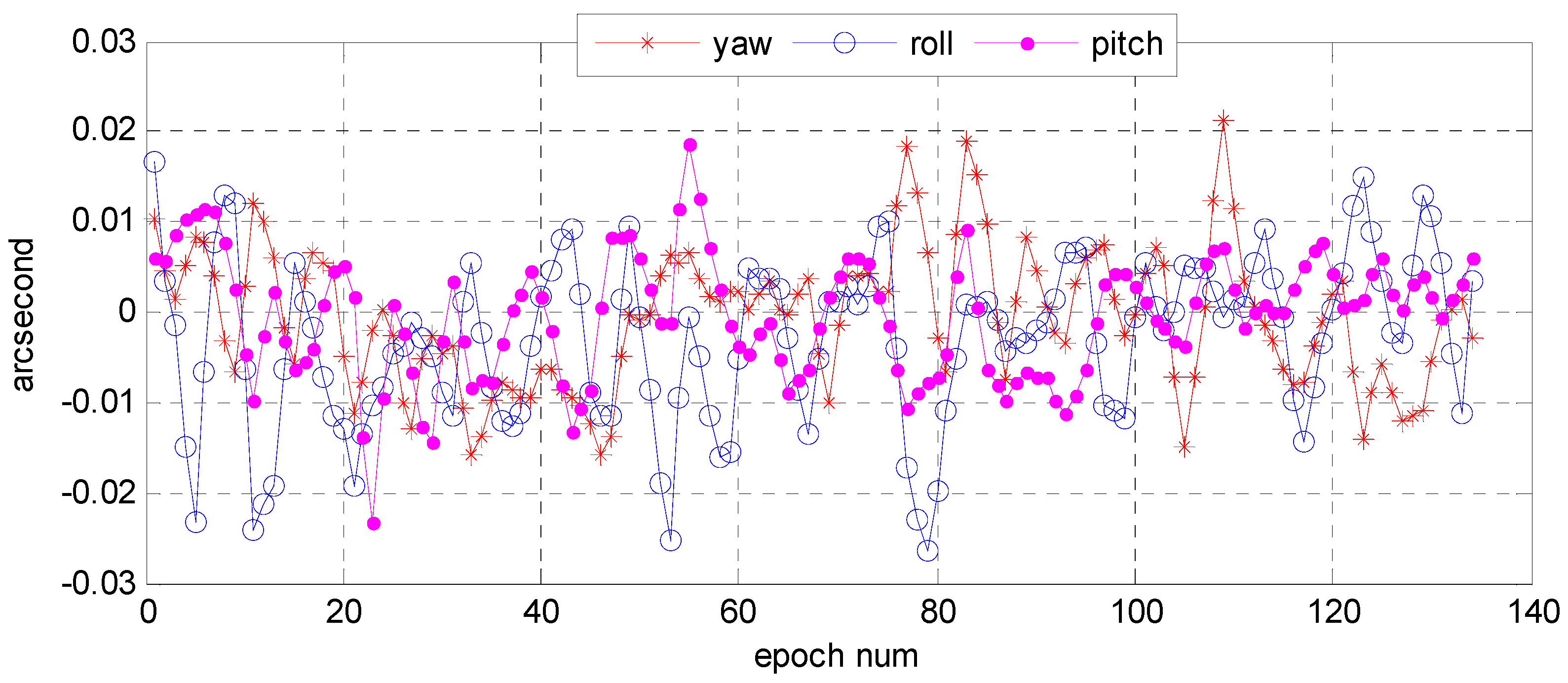
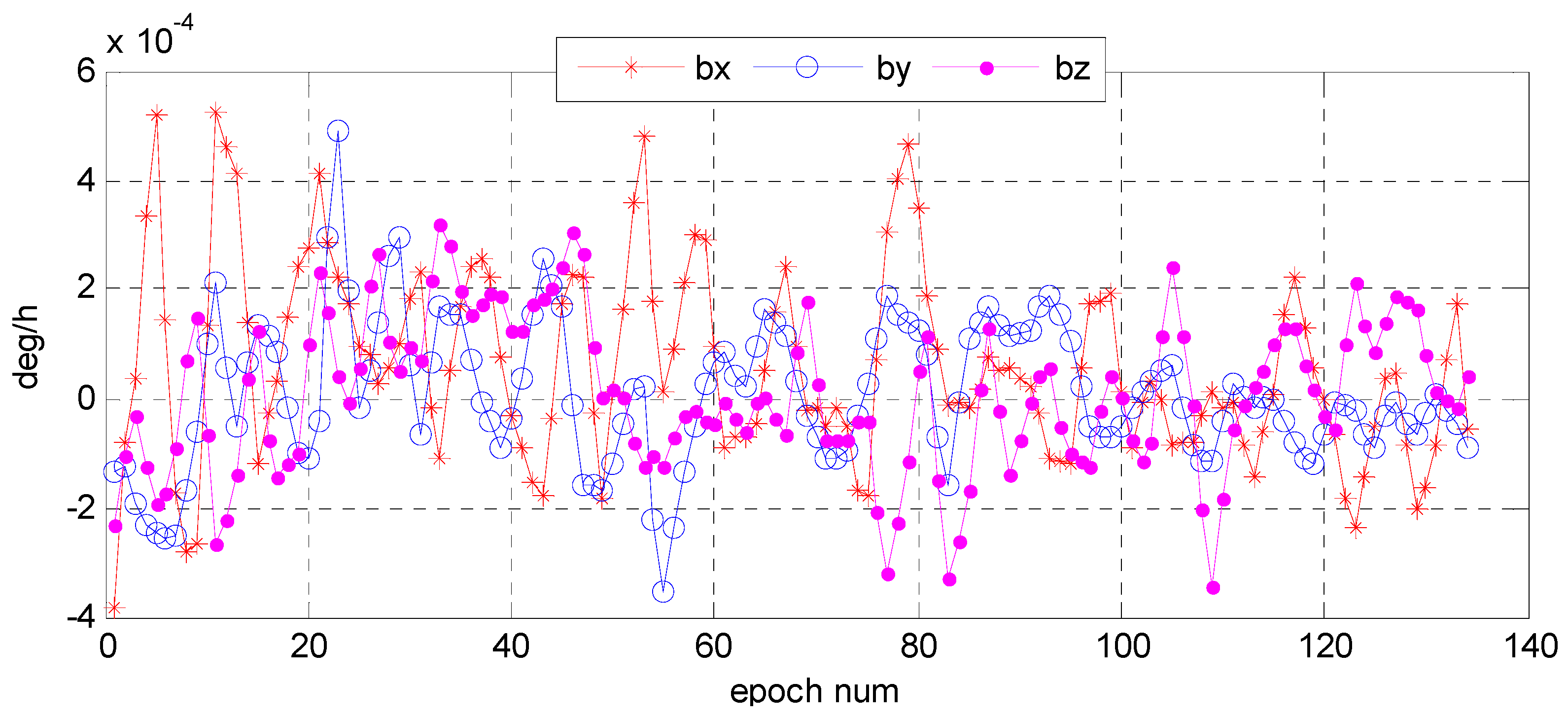
Understanding the variation trend of a state error parameter is important to determine whether the filter for the attitude determination system is convergent and stable. To test the convergence and stability of bidirectional filter and overall weighted smoothing method, we had chosen state error characteristic parameters of three vector parameter variables of attitude error quaternion,
,
, and the gyro bias error as state variables of the system. The error quaternion means the difference between the predicted and the corrected respectively by gyro and star sensor, and the error of the gyro bias means that was corrected by the star sensor. With the bidirectional filter on the star sensor and the gyro, information can be fused and the variation trend of the error parameters can stand out (
Figure 15 and
Figure 16). We found that Euler angle errors in the yaw, roll, and pitch directions varied steadily and randomly, and so did the gyro. The range of the Euler angle error was −0.02–0.03 arcsec, and that of error bias −4.0 × 10
−4~6.0 × 10
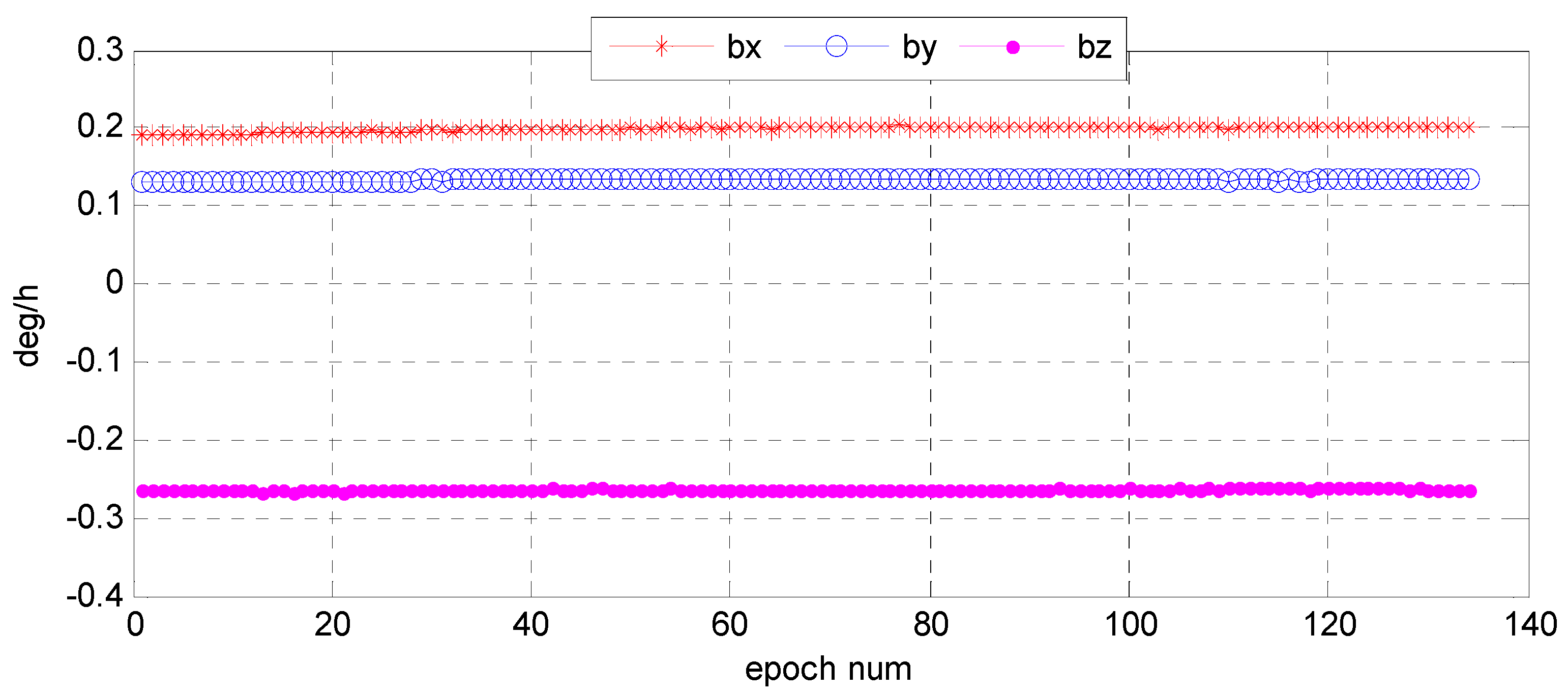
−4 deg/h. The estimates for gyro bias changed over time (
Figure 17). Therefore, we conclude that the gyro bias in the
X,
Y, and
Z directions tended toward a constant value within 0.2 deg/h, meeting the gyro bias requirement of ≤2.0 deg/h.
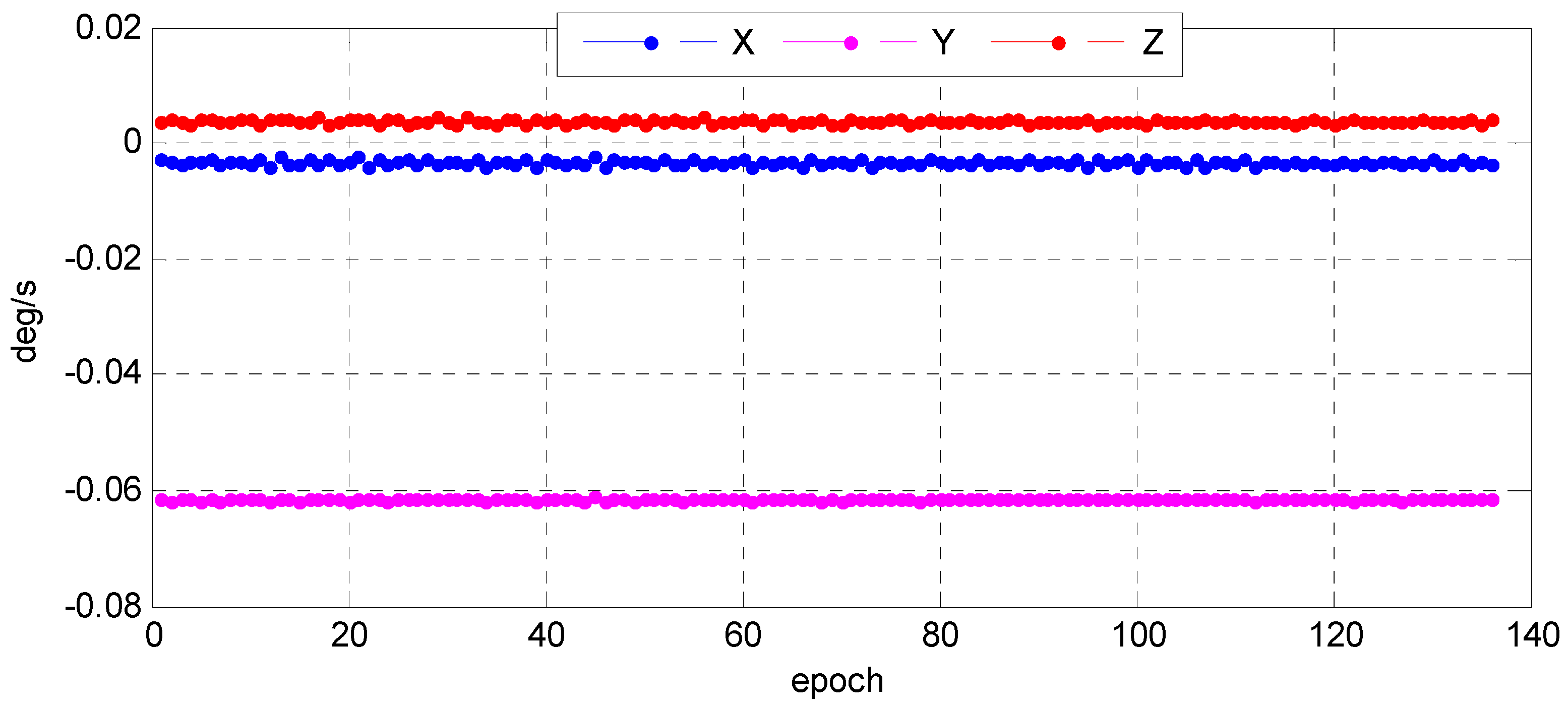
In order to further verify the convergence and stability of the designed filter, we present a detailed description of the change in the gyro angle velocity estimates after star sensor and gyro information fusion. As shown in
Figure 18, the values of the gyro angle velocity in three directions became close to the true state of the satellite flight that when the satellite was in stable flight, the angular velocity measured by the gyro was the angular velocity of the satellite around the Earth, about 0.06 degrees per second, and the measurement noise was effectively smoothed out. For more details, we list the average value and mean square of the Euler angle and error bias errors in the photos taken in different calibration fields at different times, and the two errors tended toward a Gaussian distribution (
Table 3 and
Table 4). Therefore, the bidirectional Kalman filter was reliable, which could maintain the convergence and stability.
- (3)
Relative attitude accuracy
Due to the nature of attitude data, it is difficult to verify their accuracy and reliability. As described in
Section 2.6, we still used precise attitude data calculated from an optical image in the geometric calibration field as reference data. We converted attitude parameters from the body coordinate system relative to the inertial coordinate into the body coordinate relative to the orbit coordinate. It is more convenient for us to analyze the processing precision of optical image geometry in the along-orbit direction and the direction perpendicular to the orbit.
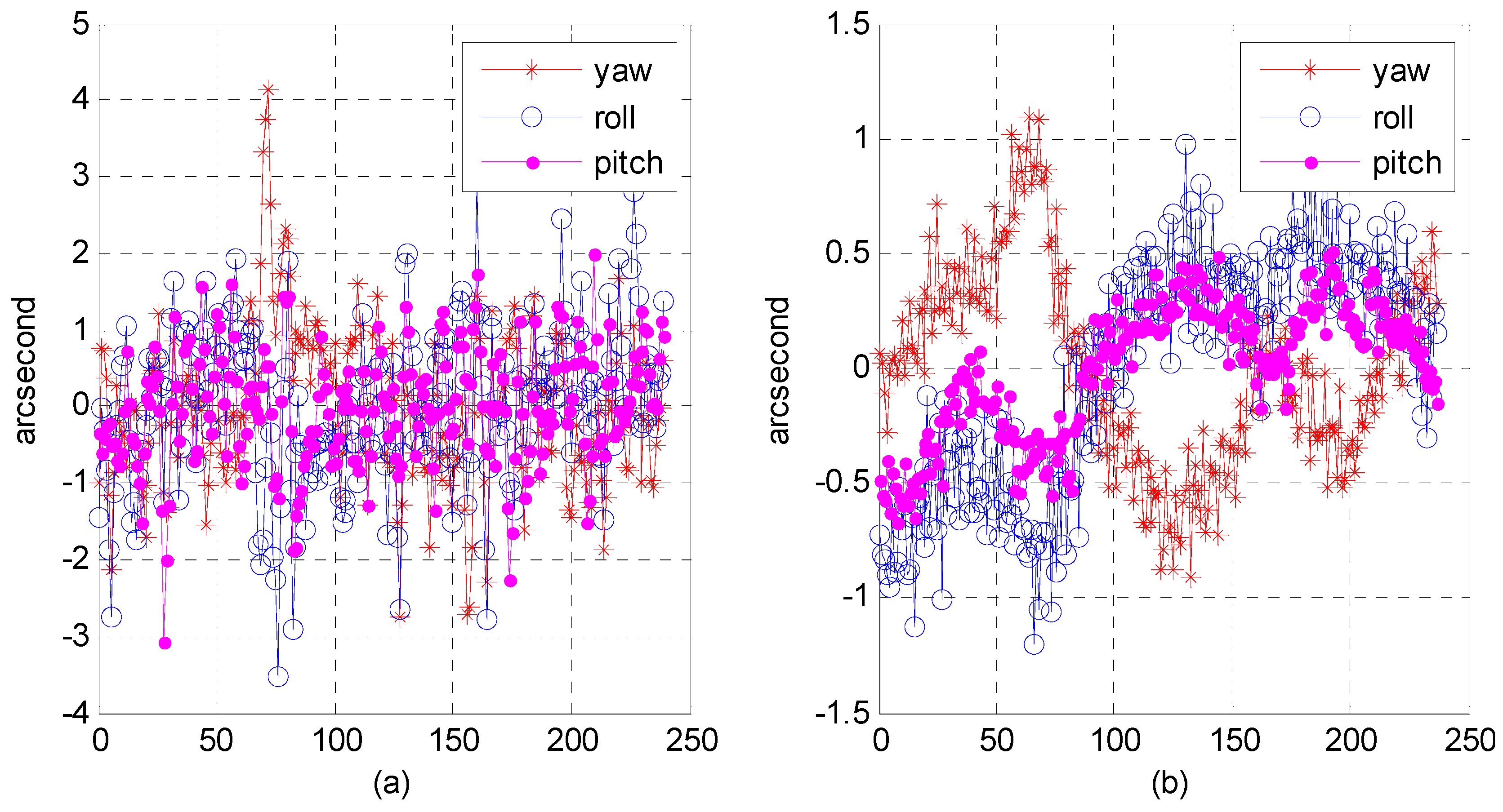
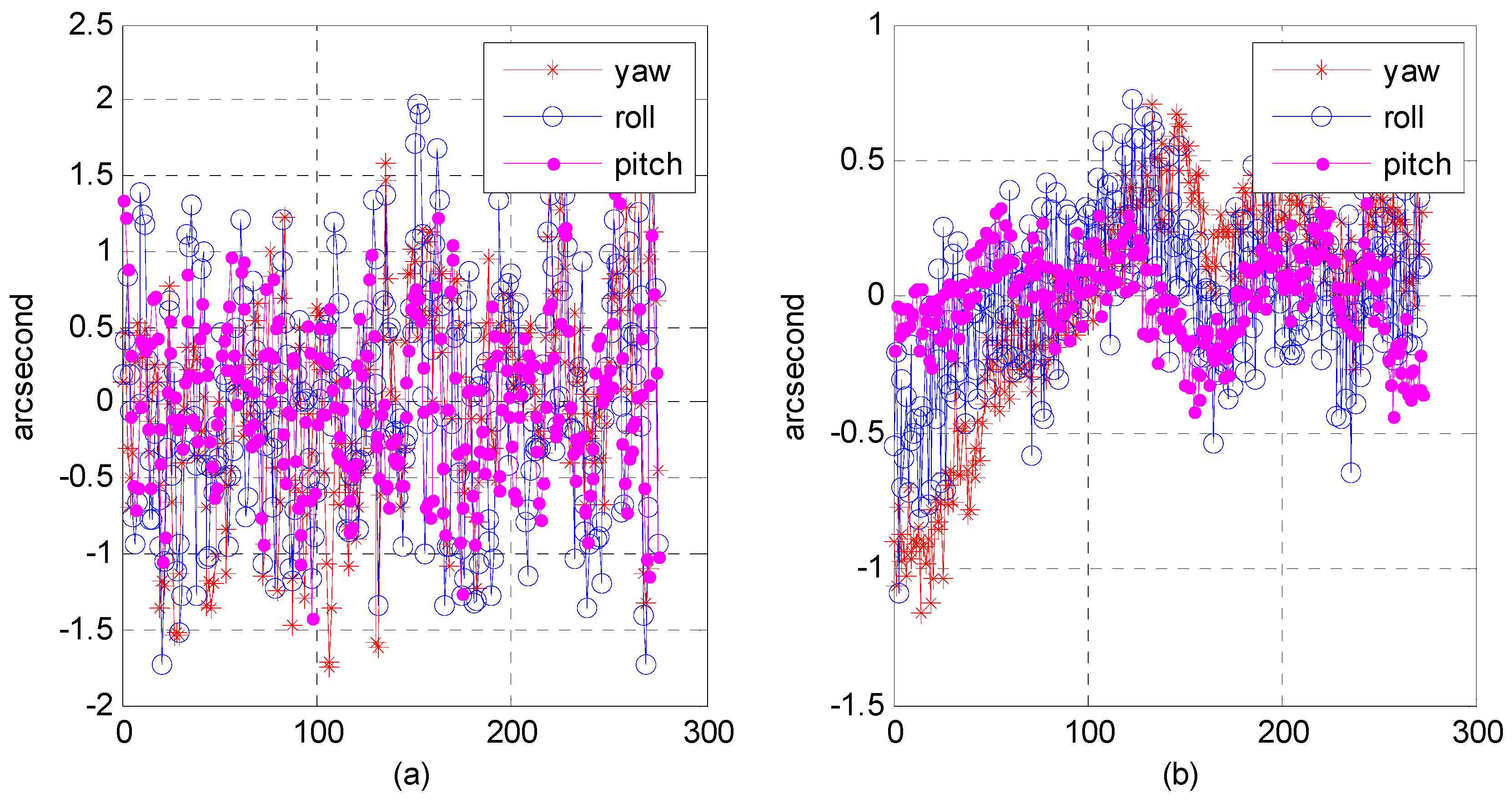
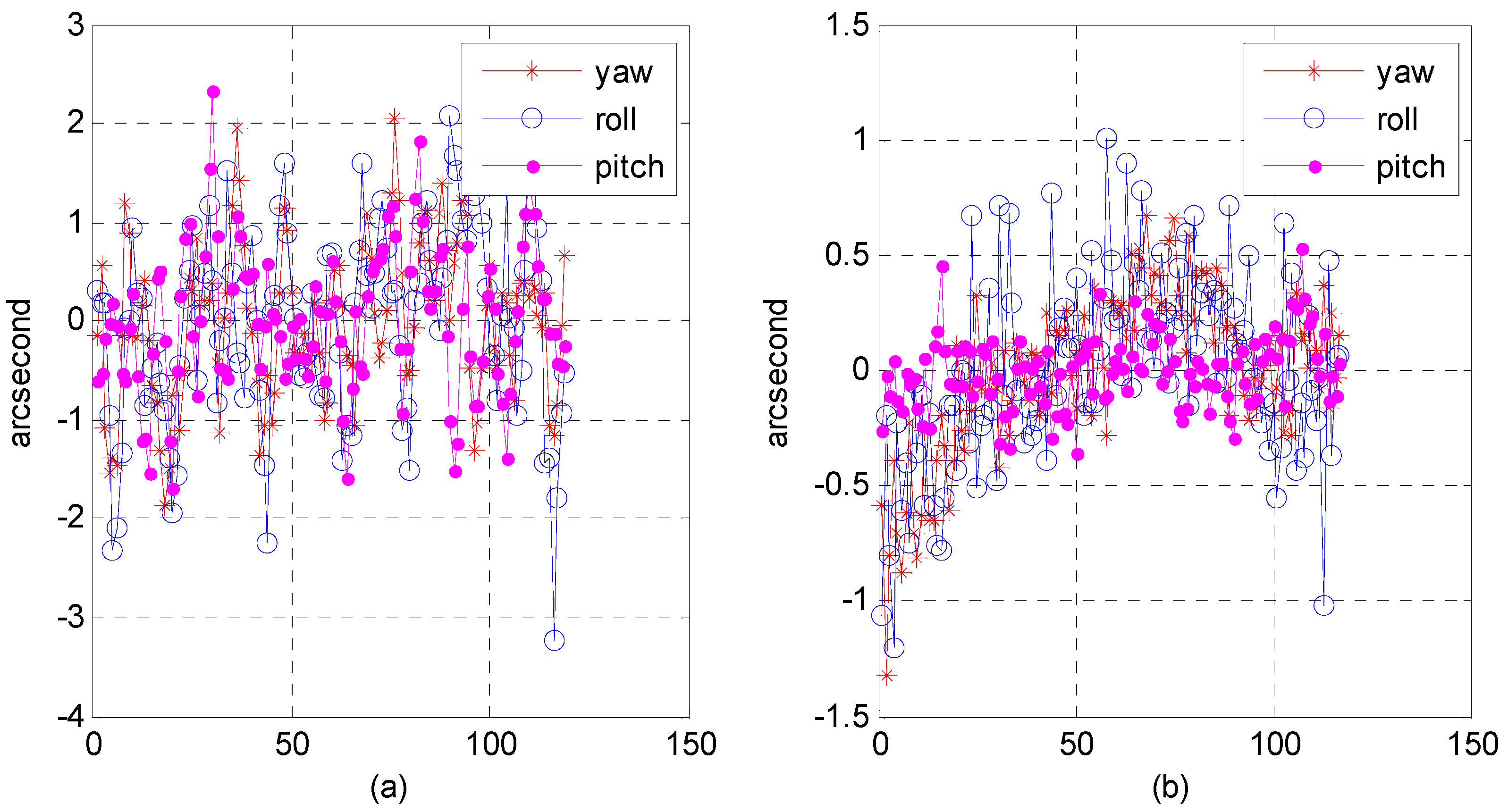
Figure 19,
Figure 20 and
Figure 21 present the relative attitude error distribution using photos taken in the Yili, Anyang, and Songshan calibration fields. As figure parts (a) and (b) indicate, we used a multi-star sensor combination and a star sensor and gyro combination to process the attitude data.
The results show that in the multi-star sensor combination, the range of relative attitude error in the yaw, roll, and pitch directions could reach the level of −2–3 arcsec, while in the star sensor and gyro combination, the range of relative attitude error could be within plus or minus sub-arcsec level. We analyzed the reliability of our proposed algorithm;
Table 5 presents the statistics on the mean square error of the relative attitude in different attitude-sensor combinations. In the case of the multi-star sensor combination, the mean square error could reach approximately 1 arcsec and was ≤0.5 arcsec in the star sensor and gyro combination. The processing effect in the multi-star sensor combination was worse than in the star sensor and gyro combination because the attitude in the multi-star sensor combination contained high-frequency noise; in the star sensor and gyro combination, star sensor high-frequency noise could be smoothed out, and the gyro bias could be estimated to optimize the attitude data estimation.
- (4)
Accuracy analysis of attitude fitting model
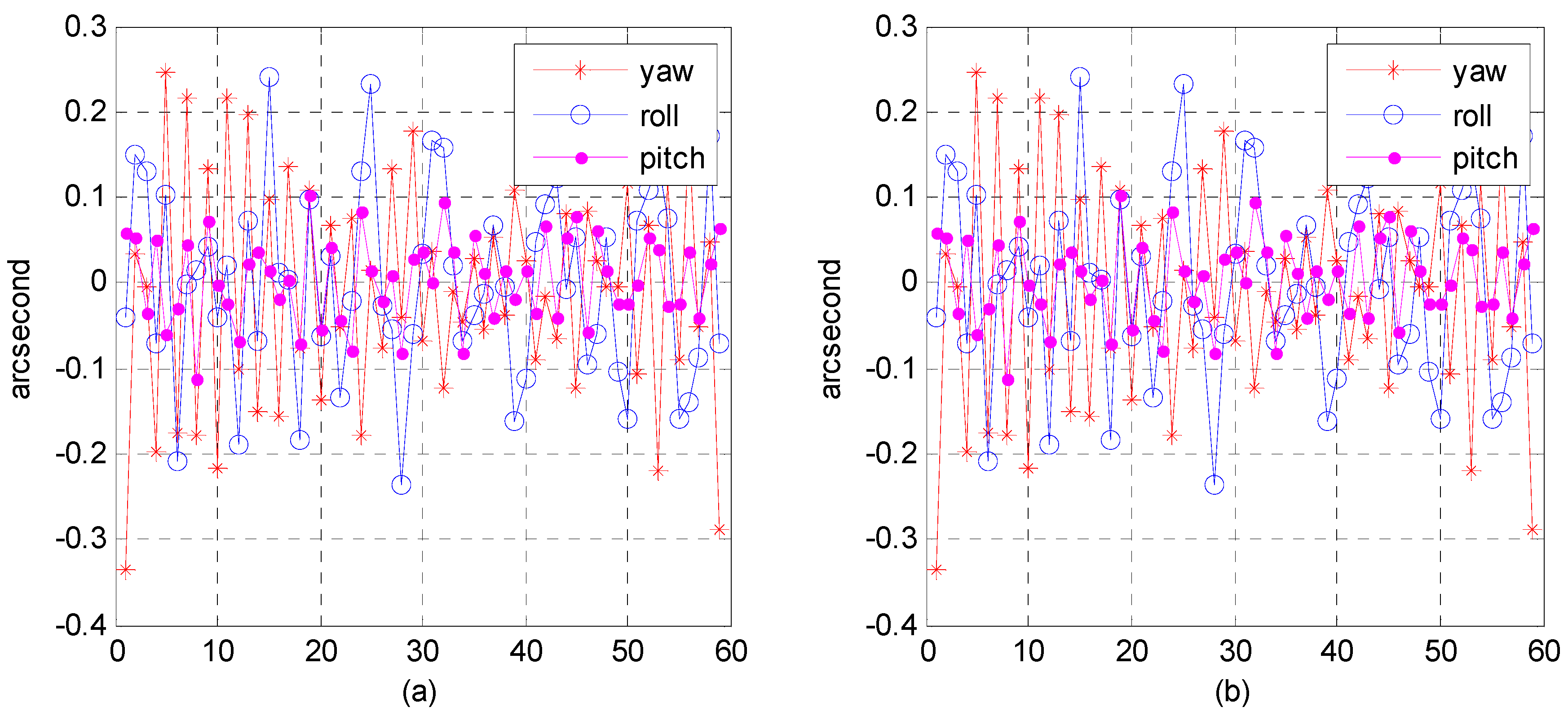
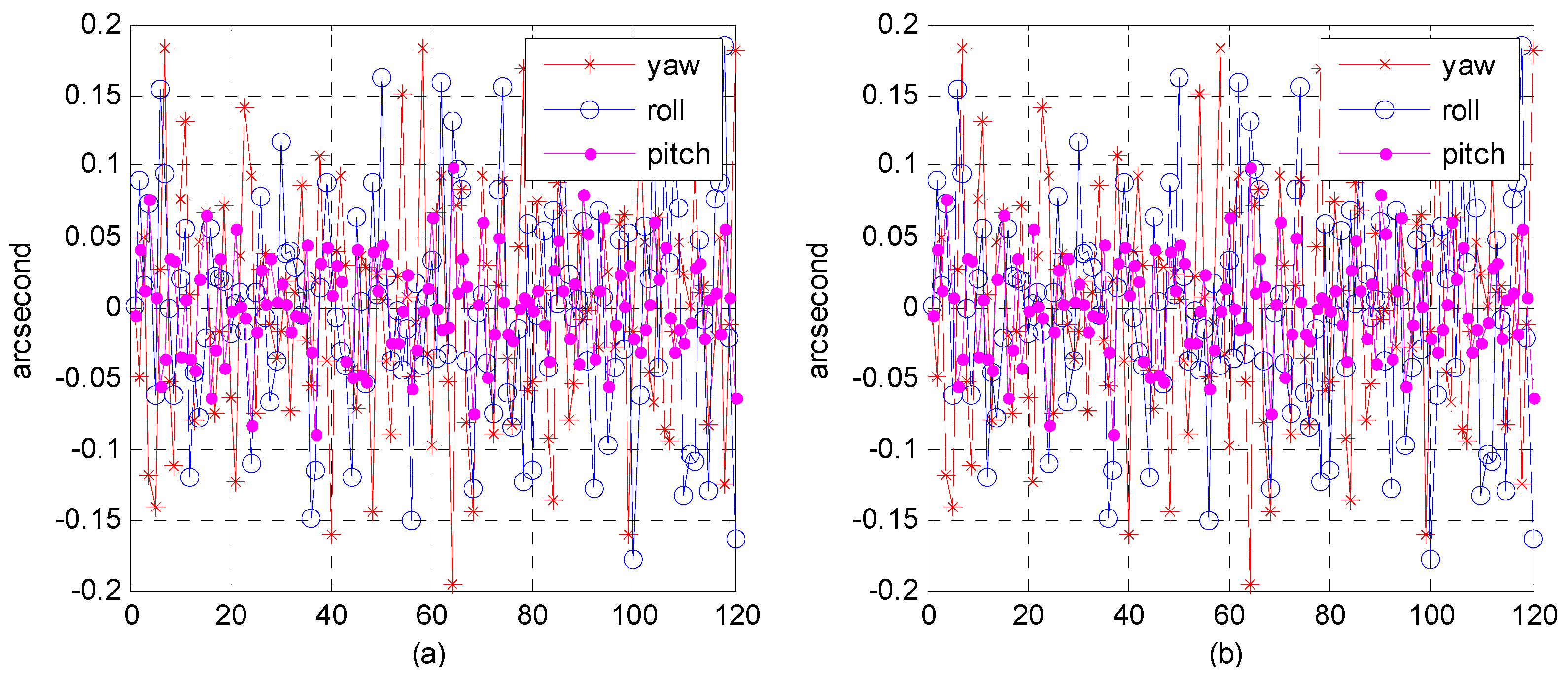
Although the precision attitude parameters could be obtained through a star sensor and gyro combination, the sampling frequency was only 4–8 Hz, far below the imaging frequency (20,000 Hz) of the satellite line push-broom camera. The resolution of the satellite panchromatic camera in this research was 1 m and the orbital altitude was 645 km; to meet a panchromatic geometric relative accuracy of better than 1 pixel, the fitting model accuracy of the attitude parameter should be within 0.3 arcsec. Therefore, we focused on how to obtain the precise attitude parameters of each scan line of the push-broom camera. Three attitude-fitting methods are described in detail in
Section 2.5: Lagrange polynomial interpolation, orthogonal polynomial fitting, and the spherical linear interpolation model. We used different fitting models in our experiment on attitude parameters obtained from the star sensor and gyro combination, and evaluated the fitting accuracy in its precise attitude.
The attitude data used to fit on different fitting models were down-sampled from 8 to 4 Hz, allowing us to use different fitting models to fit attitude parameters of different forms of expression. Finally, we used 8 Hz attitude parameters as reference values to evaluate the fitting accuracy.
Figure 22,
Figure 23 and
Figure 24, describe respectively, the attitude fitting accuracy distribution in the Lagrange polynomial interpolation, orthogonal polynomial fitting, and spherical linear interpolation models.
Parts (a) and (b) in each figure separately indicate the attitude parameter in the Euler angle and quaternion. The above-mentioned figures lead us to believe that we can control the attitude fitting accuracy in yaw, roll, and pitch directions within a level of 0.3 arcsec. Attitude parameters of both the Euler angle and quaternion could be used to build mathematical fitting models, and all of three types of fitting model could be used to fit the attitude parameter.
Table 6 lists the statistical details of the fitting accuracy in the yaw, roll, and pitch directions based on different fitting methods. The results show that the orthogonal polynomial fitting model was more suitable for building mathematical models and could ensure the relative geometry accuracy of the optical image.
- (5)
Imagery processing accuracy
We would use post-precise orbit data to provide precise exterior orientation line elements for image geometry processing, in which the accuracy could reach the centimeter level. Therefore, due to high-precision calibration and time synchronization, the attitude data are used directly for image geometry processing, which may directly reflect the quality of the data. The
Section 3.1 describes in detail the geometric calibration field data for checking geometric accuracy, including the Songshan, Anyang, Dongying, Sanya, Taiyuan, and Yili calibration fields, and we would check the quality of the attitude parameter on the basis of the geometric calibration field image taken by the panchromatic camera and DOM/DEM reference data.
Wuhan University developed an optical satellite ground pretreatment system for the Yaogan-24 remote sensing satellite image processing, and we conducted experiments on the platform. The optical satellite ground pretreatment includes radiation treatment, sensor calibration, geometric correction, and so on. We took attitude data as the input for image preprocessing, and then analyzed the geometric accuracy on the basis of the geometric correction product and DOM/DEM of the calibration field reference data.
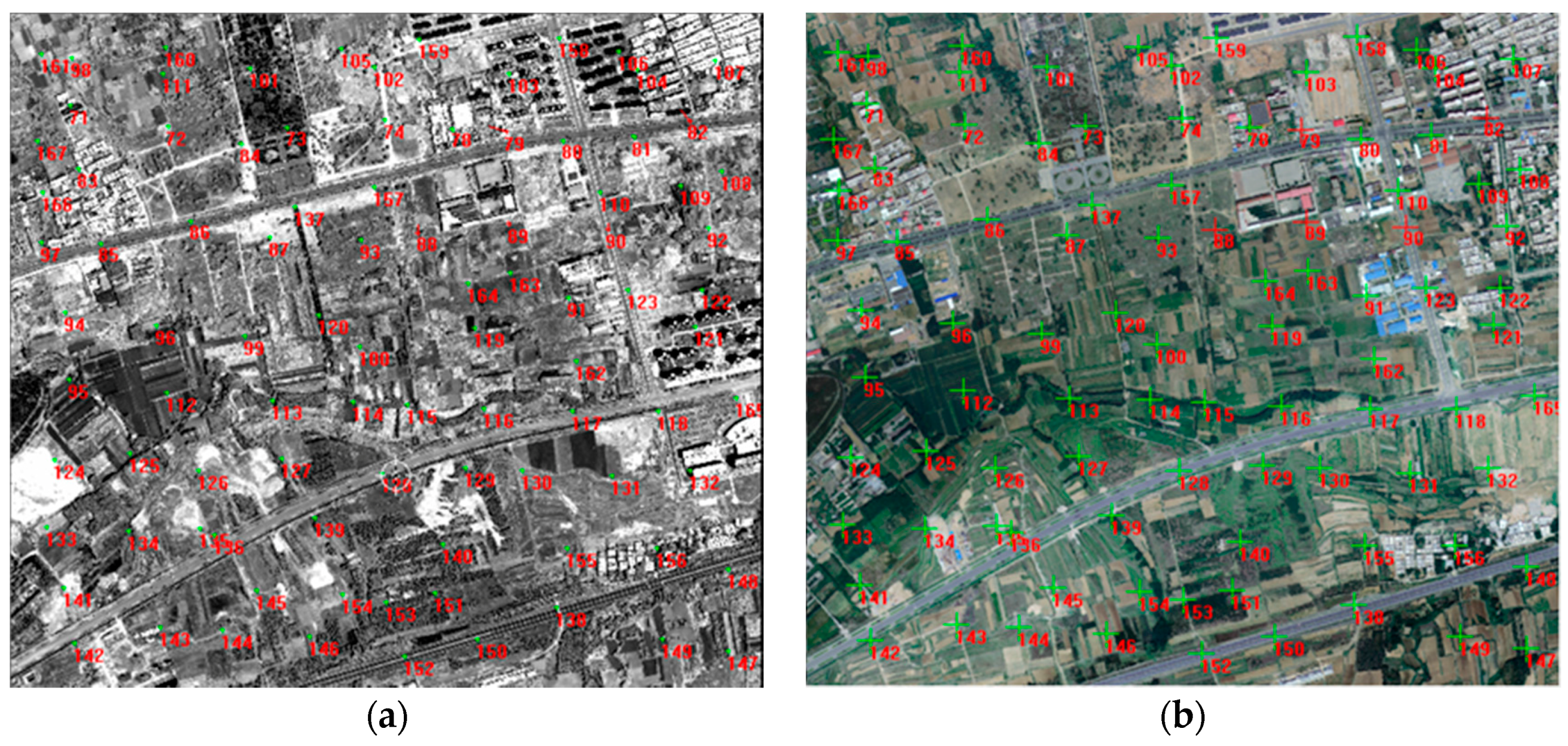
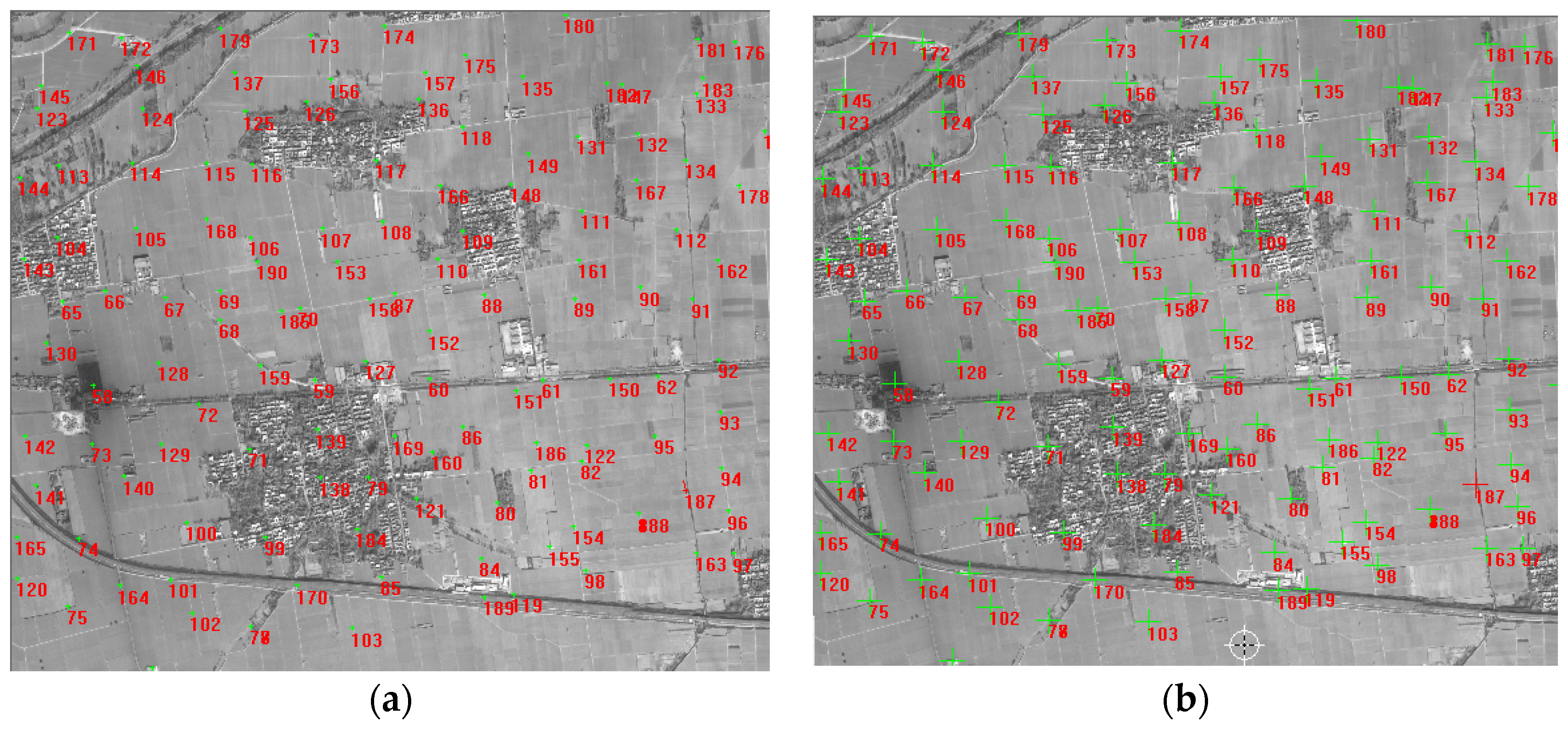
Figure 25 and
Figure 26 show the distribution of correspondence points between the DOM images and geometric correction images taken by the satellite panchromatic camera in Songshan on 16 March 2015 and in Anyang on 9 February 2015. The correspondence points between the DOM and geometric correction images were sufficient and were distributed more evenly to ensure the reliability of the geometric precision.
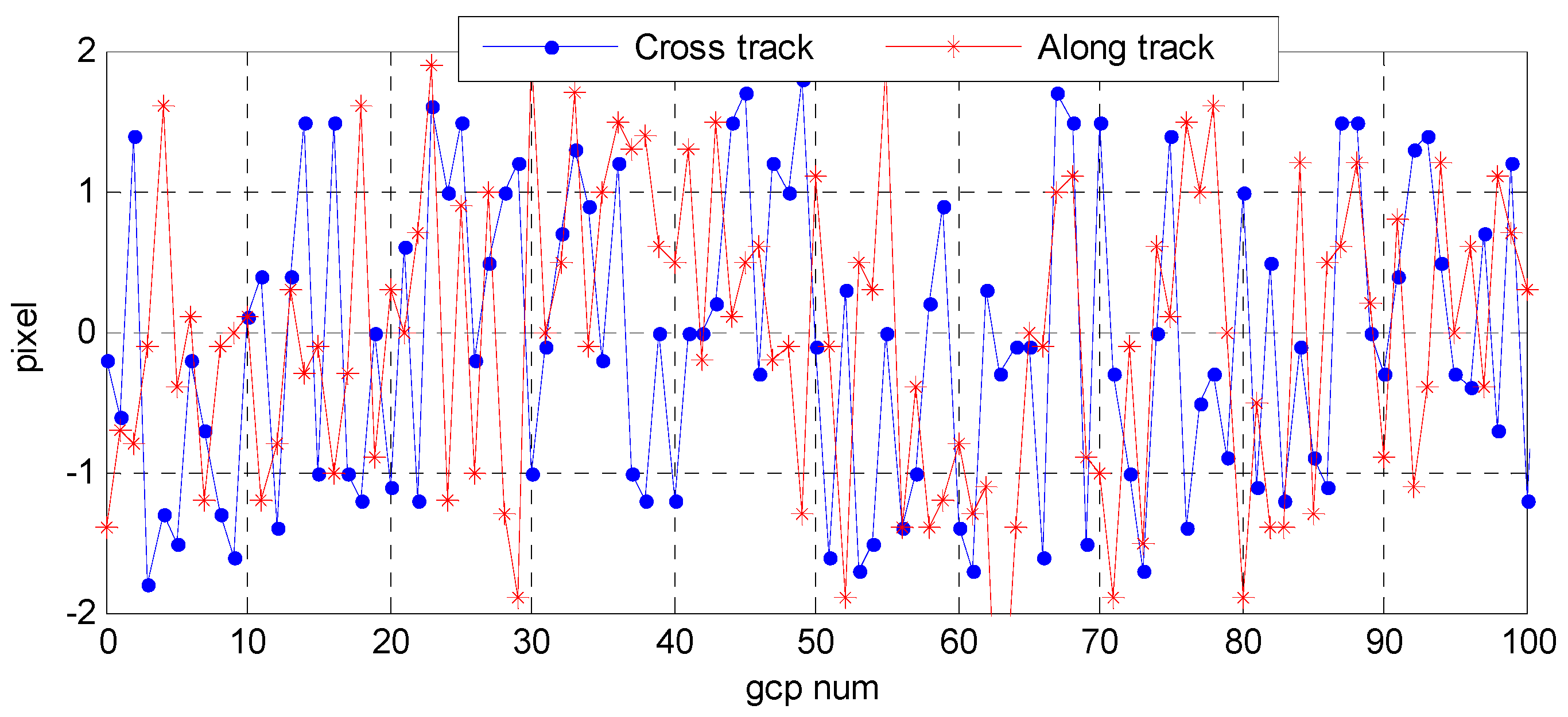
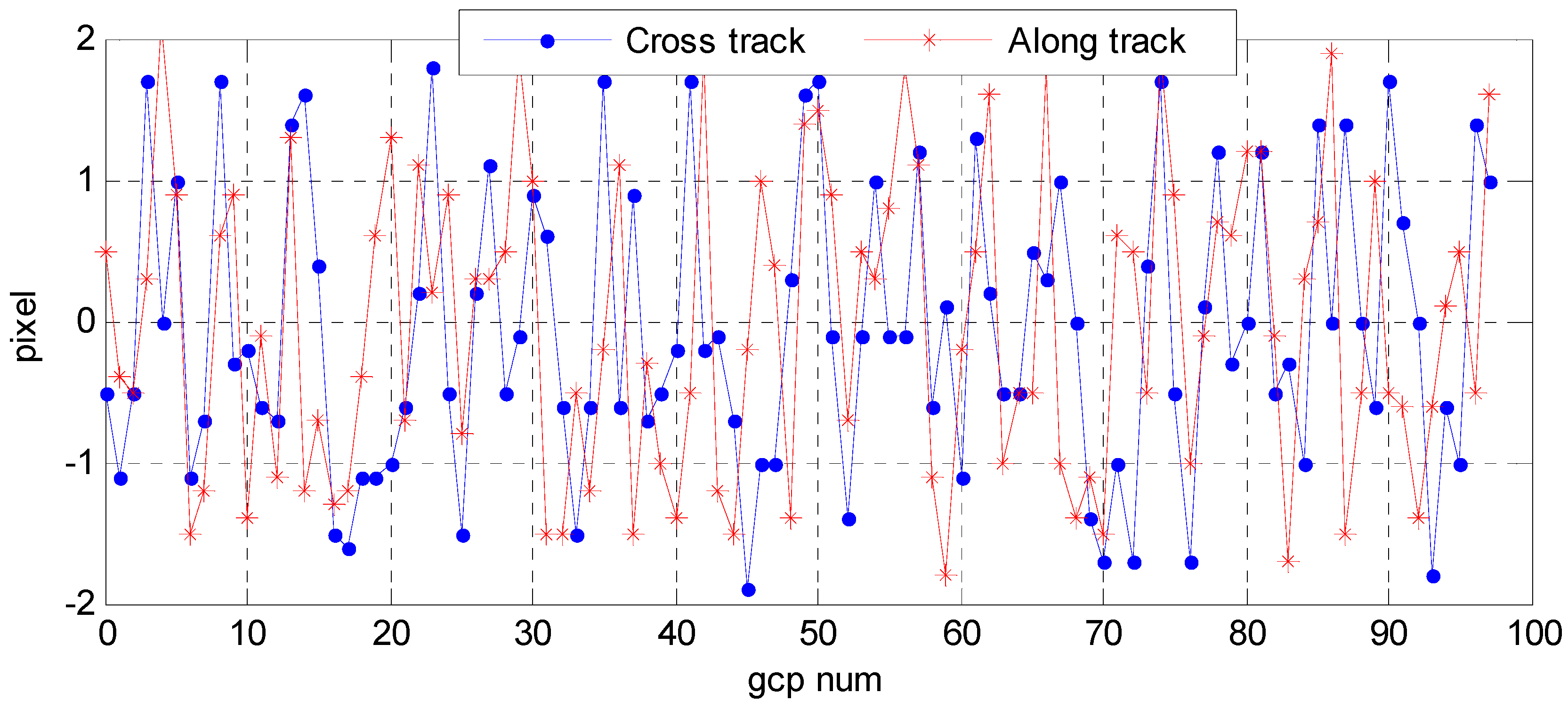
Figure 27 and
Figure 28 show the distribution of the relative geometric accuracy in the cross-track and along-track directions of the panchromatic image with respect to the DOM/DEM of the calibration field. The relative geometric accuracies in the cross-track and along-track directions were clearly between 1.5 and 2.0 pixels. Meanwhile, we concluded that the relative accuracy in the attitude data was 0.3–0.5 arcsec with respect to the precise attitude data calculated on the optical image in the geometric calibration field in
Section 3.2. Therefore, both conclusions confirmed each other.
Table 7 and
Table 8 respectively show detailed statistics on the uncontrolled and relative positioning accuracy of the satellite geometric correction image taken by the panchromatic camera based on on-board and on-ground processing attitude data. Furthermore, we could conclude that the side swing angle did not affect the image geometric correction accuracy under no control-point condition when images were taken in different calibration fields, and the uncontrolled and relative positioning accuracy of the geometric correction image based on on-ground processing attitude data was about 15 m and 1.3 pixels, comparing to on-board attitude data about 30 m and 2.4 pixels, which increased about 50%. As the attitude determination accuracy of the star sensor was 5 arcsec, which is configured by the satellite, and the orbital altitude of the satellite was 645 km, 1 arcsec corresponded to a ground error of 3.127 m. Theoretically, the uncontrolled positioning precision of the satellite should within 15 m. Therefore, the attitude determination accuracy of the star sensor and the image positioning accuracy without a control point were consistent.

































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}