
A Hybrid Kernel-Based Change Detection Method for Remotely Sensed Data in a Similarity Space


Abstract
:
1. Introduction
2. Methodology
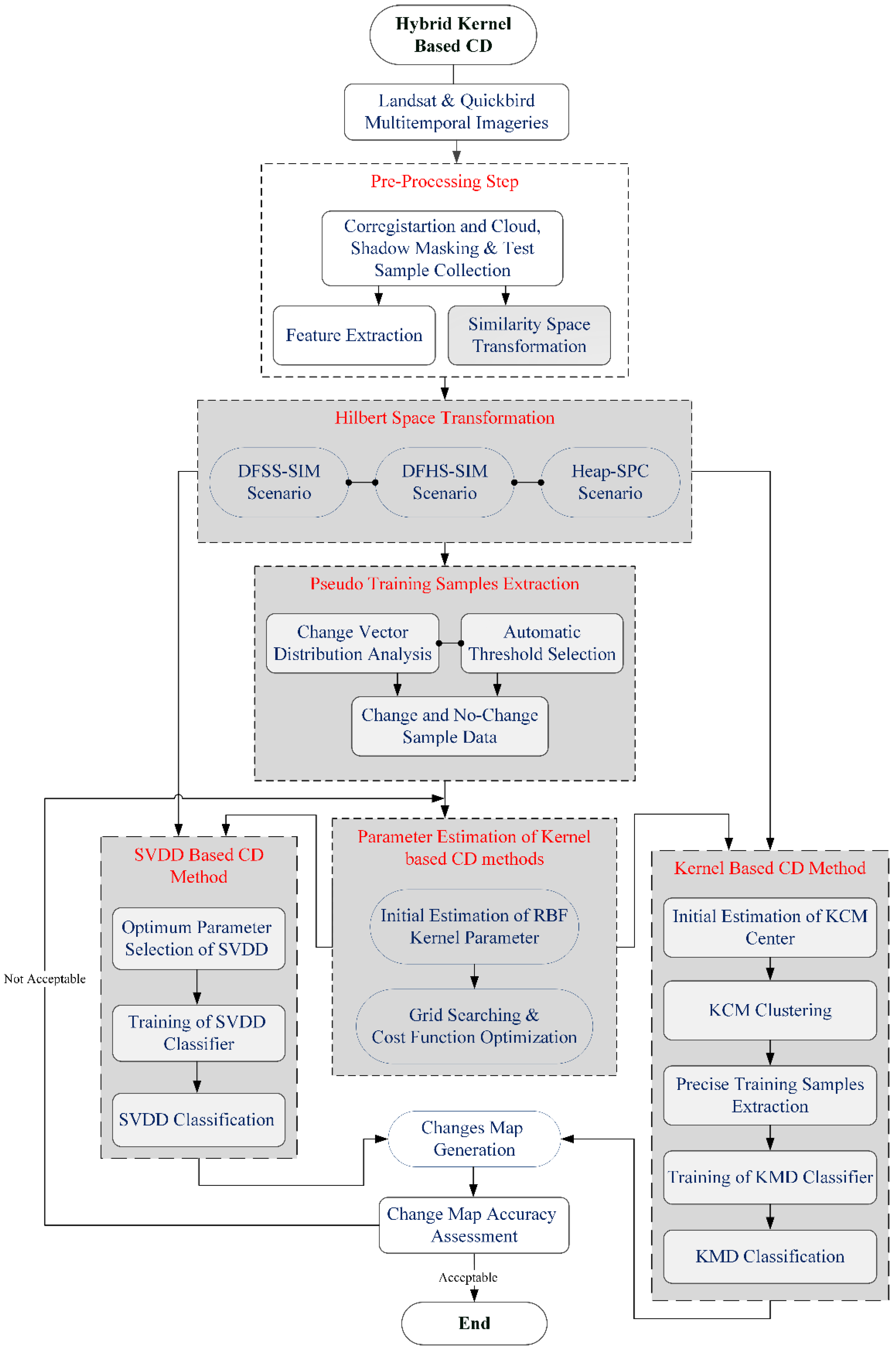
2.1. Proposed Framework

2.2. Thresholding Scheme
2.3. Kernel K-Means Clustering
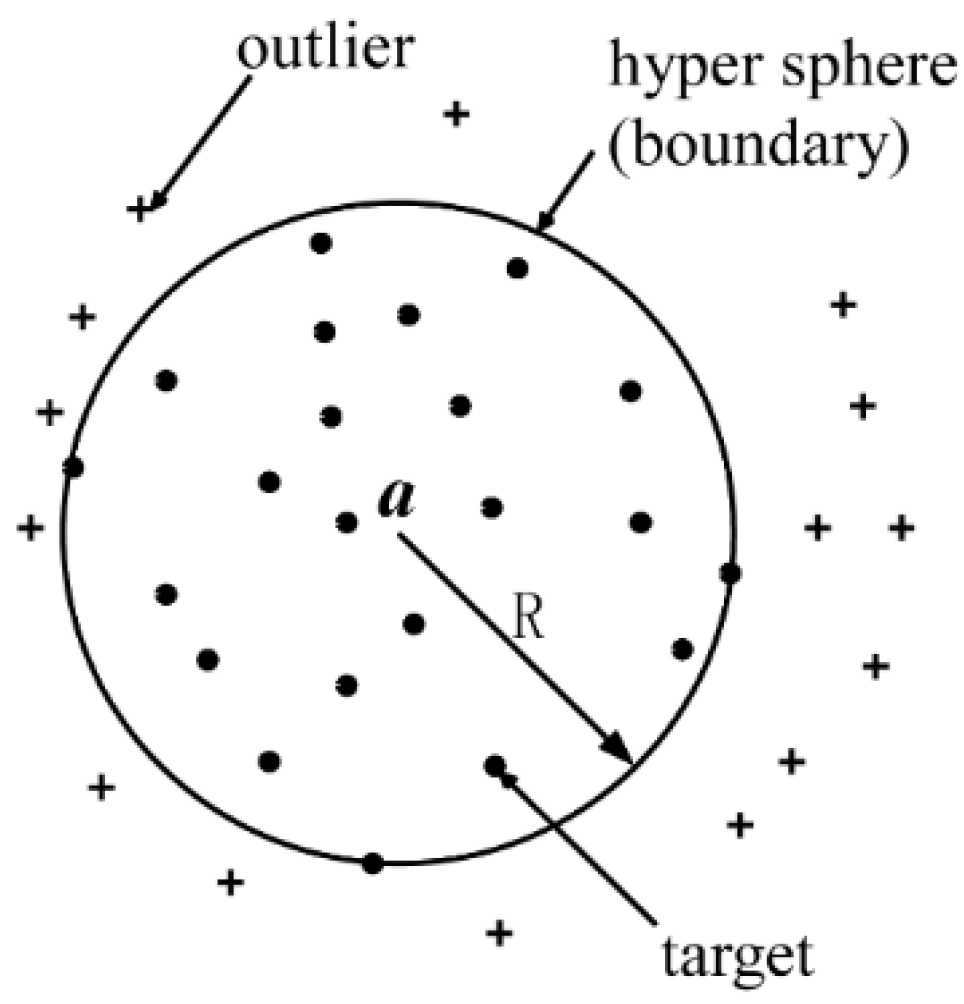
2.4. Support Vector Data Description

2.5. Kernel Minimum Distance Classifier
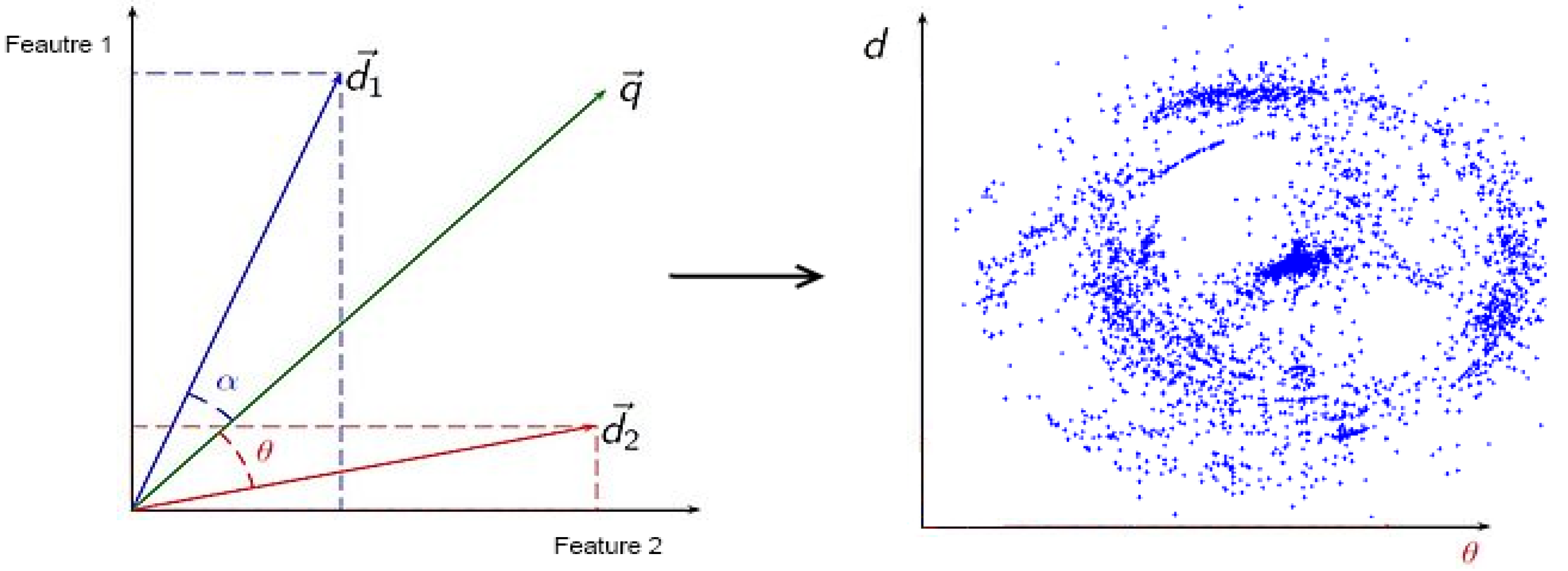
2.6. Similarity Space Transformation

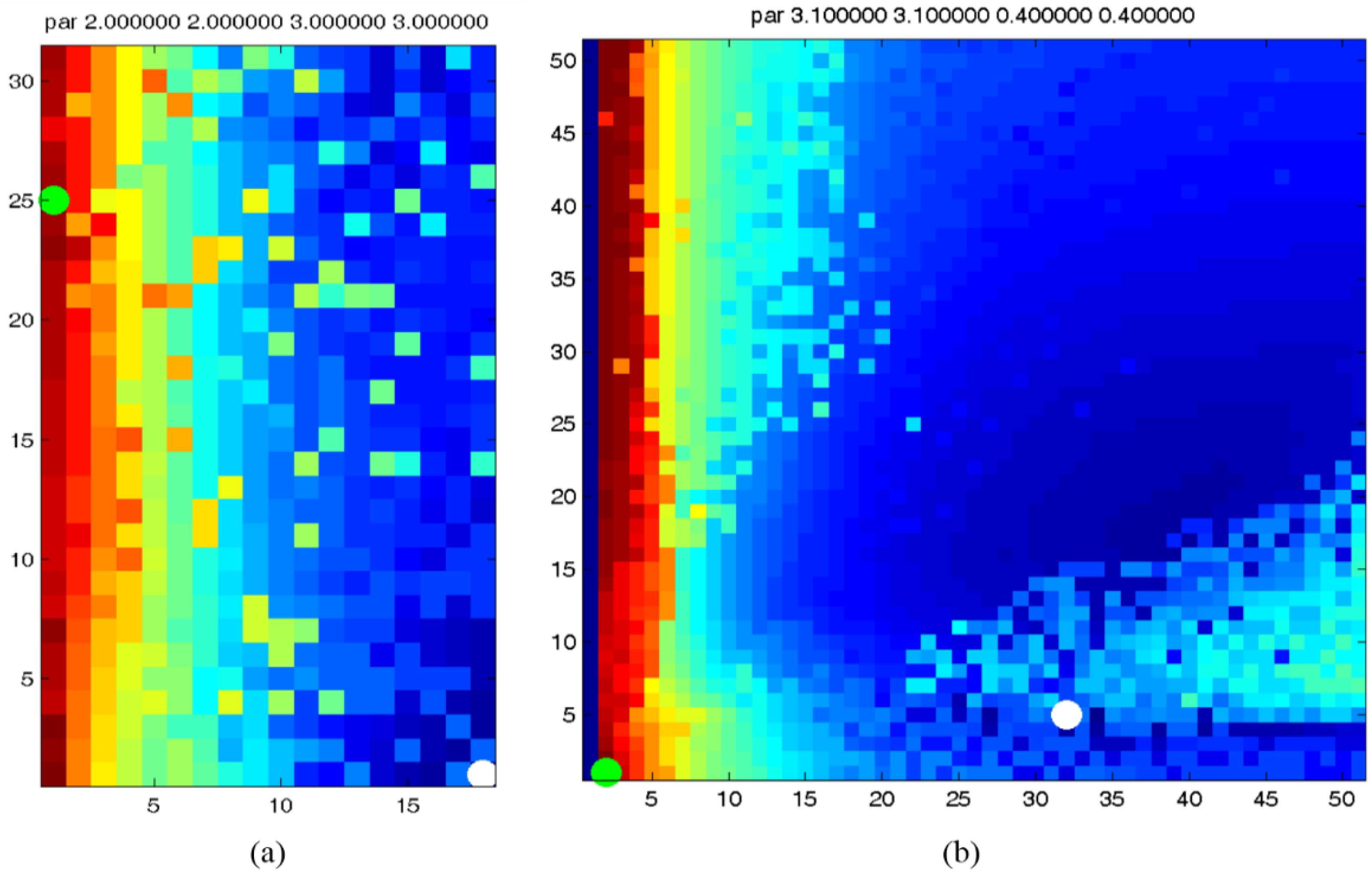
2.7. Improved Kernel Parameter Selection
- (1)
- Local kernels. In this kernel type, only the data that are close or in the proximity of each others have an influence on the kernel values. Basically, all kernels that are based on a distance function are local kernels. Examples of typical local kernels are: Radial Basis, KMOD, and Inverse Multi-quadric.
- (2)
- Global kernels. In this kernel type, samples that are far away from each other still have an influence on the kernel value. All kernels based on the dot-product are global:
3. Experiments
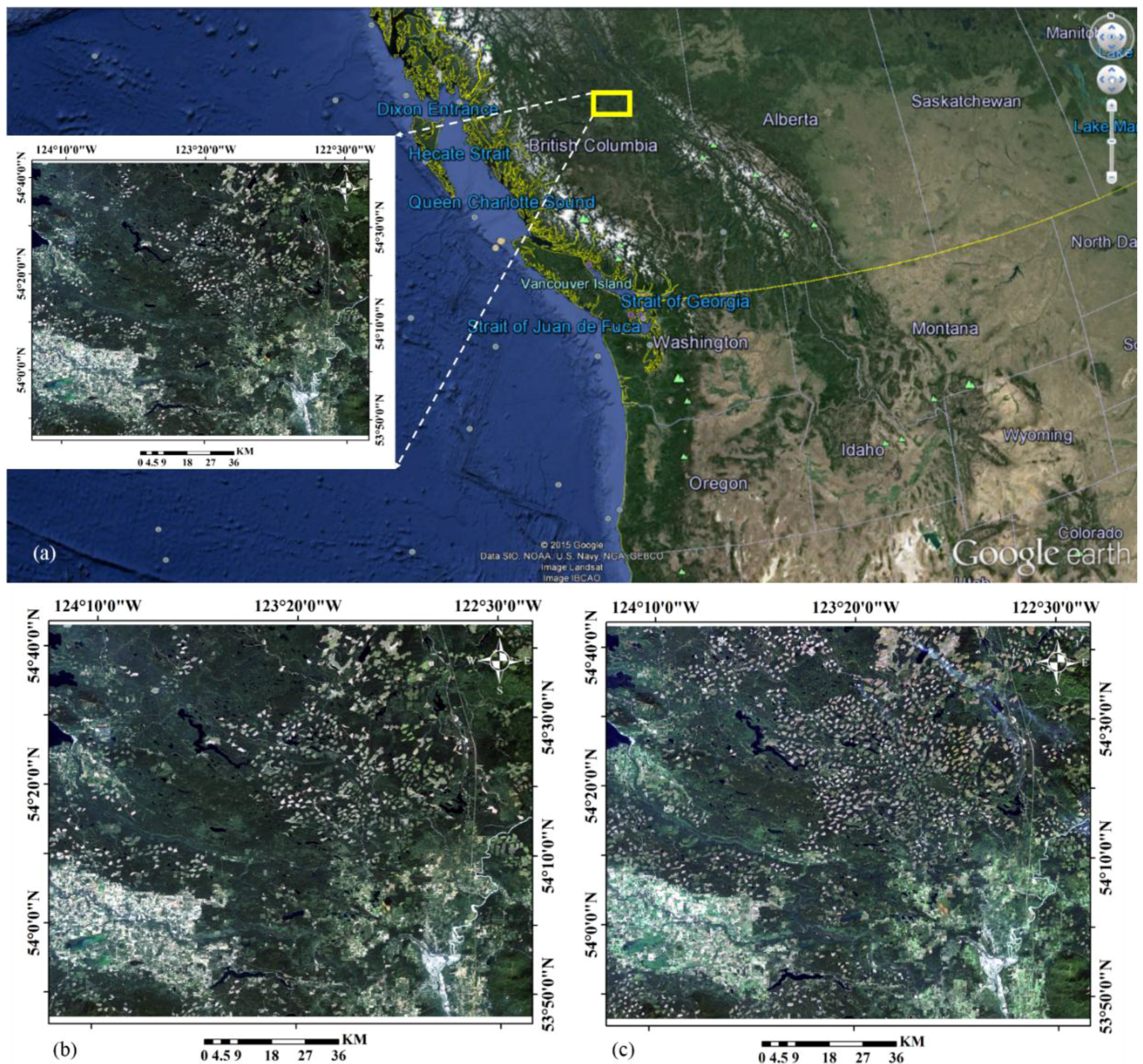
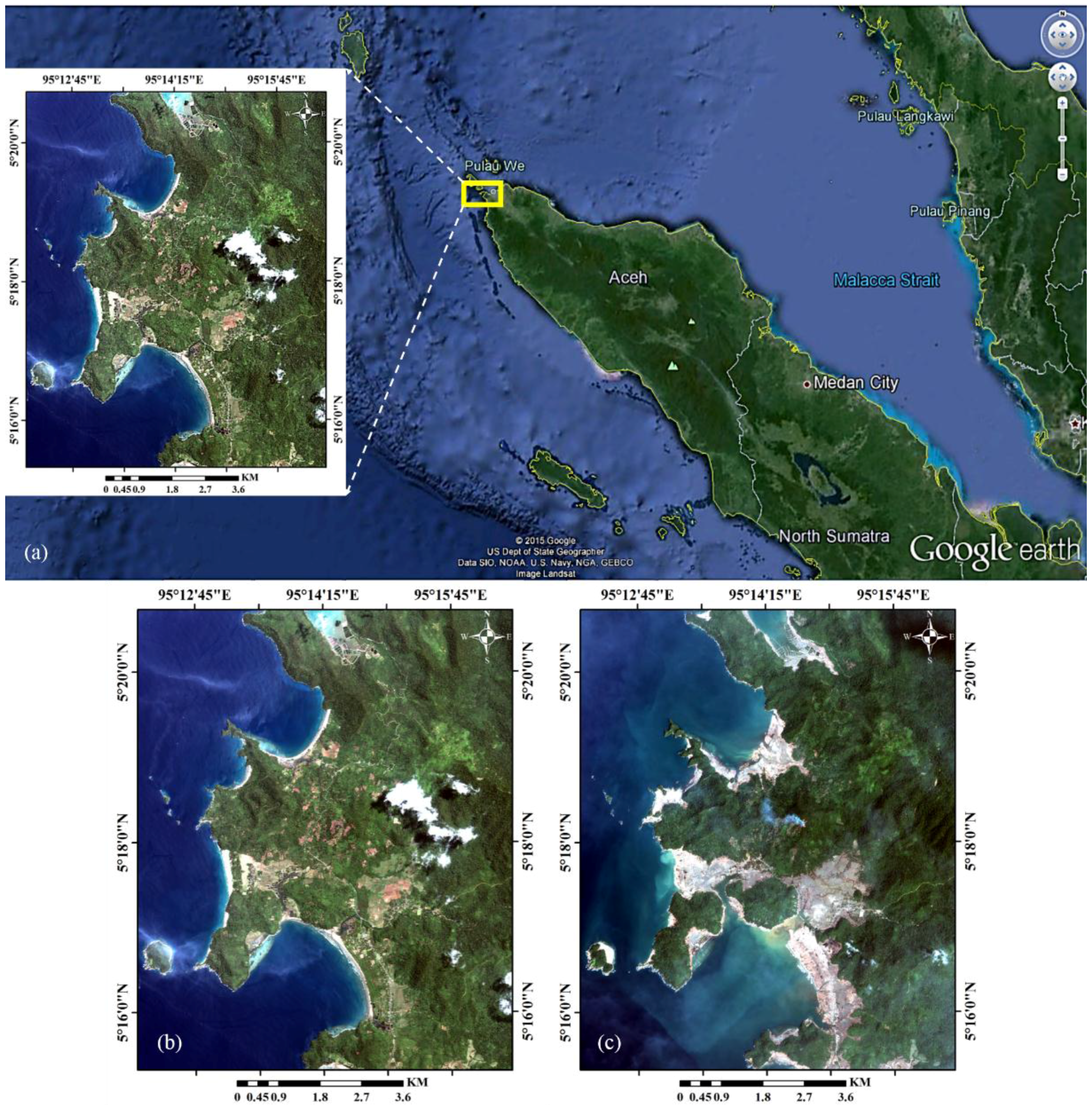
3.1. Remote Sensing Data


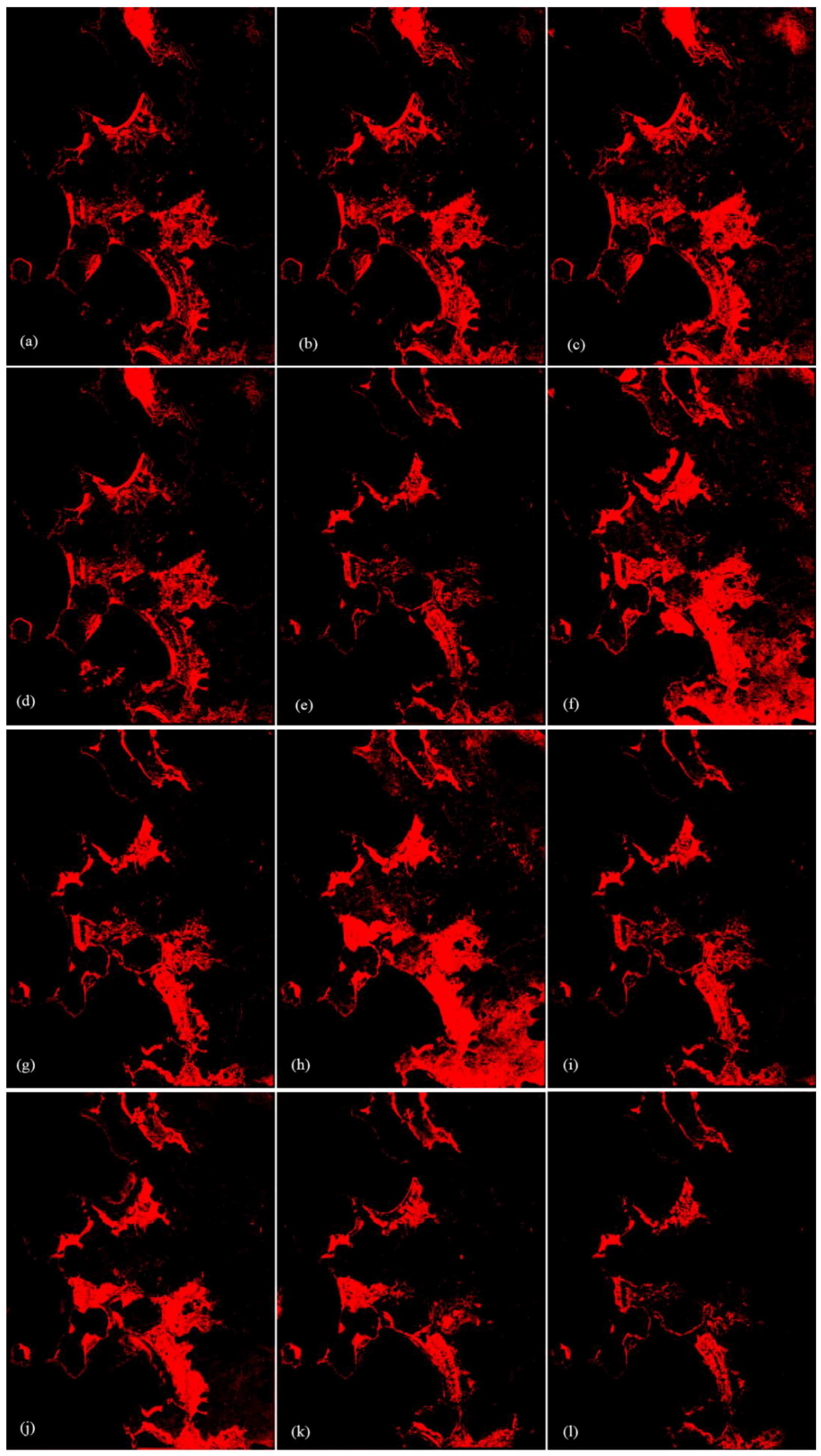
3.2. Experimental Results
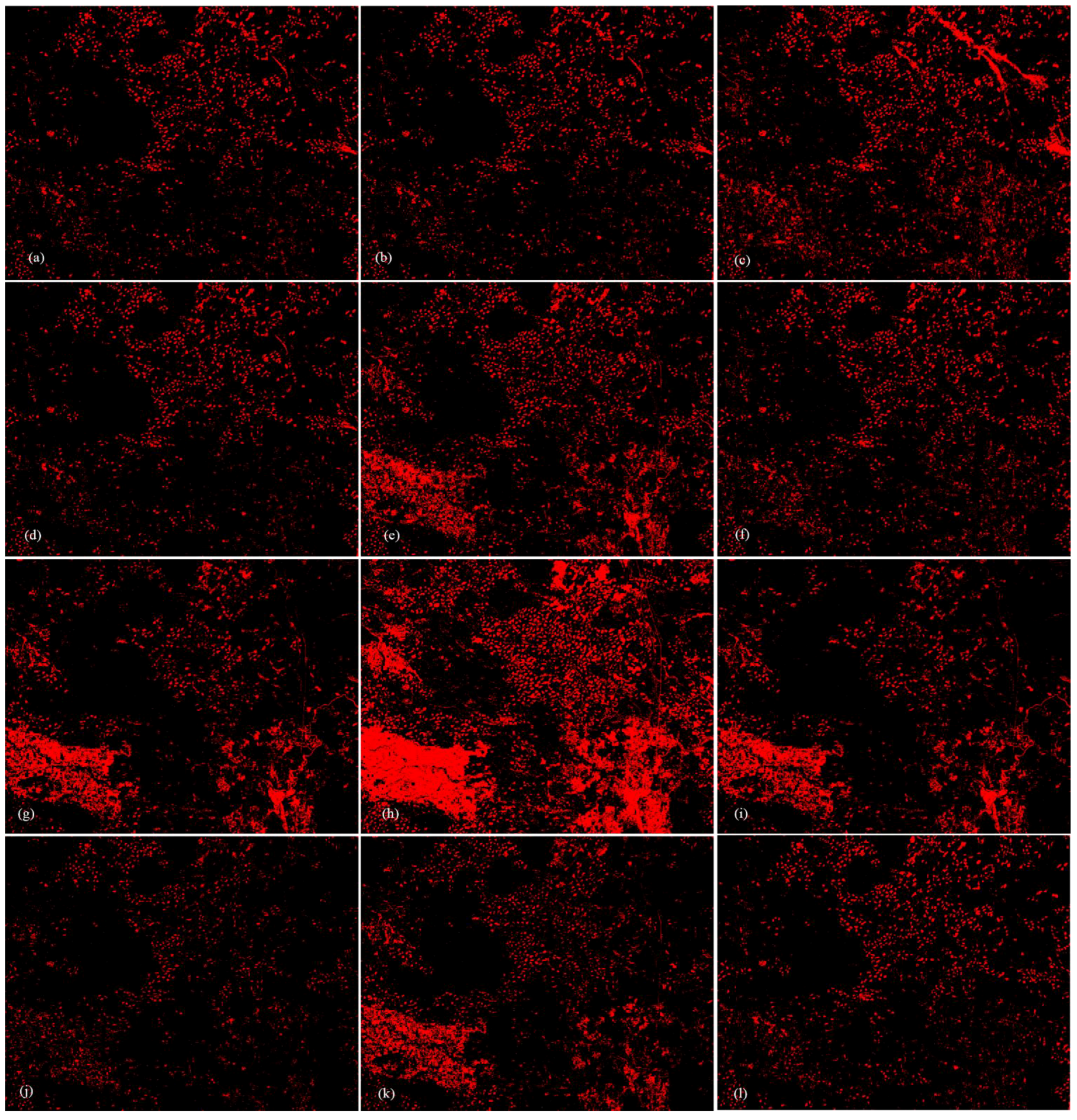
3.2.1. Proposed Kernel-Based CD Method

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Classifier | Input Bands | Kernel Type | DFSS-SIM | DFHS-SIM | |||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Quickbird | Landsat | Quickbird | Landsat | Quickbird | Landsat | ||||||
| Kappa | OA | Kappa | OA | Kappa | OA | Kappa | OA | ||||
| KMD | SDACV | SDACV | Linear | 0.85 | 90.47 | 0.89 | 95.38 | 0.86 | 90.62 | 0.90 | 96.74 |
| KMD | SDACV | SDACV | Polynomial | 0.68 | 71.44 | 0.71 | 76.49 | 0.70 | 73.63 | 0.73 | 78.29 |
| KMD | SDACV | SDACV | RBF | 0.90 | 94.39 | 0.89 | 95.67 | 0.74 | 78.21 | 0.82 | 87.64 |
| KMD | SDACV | SDACV | Sigmoid | 0.87 | 91.81 | 0.79 | 85.27 | 0.68 | 71.60 | 0.88 | 94.58 |
| Classifier | Input Bands | Kernel Type | Heap-SPC | ||||
|---|---|---|---|---|---|---|---|
| Quickbird | Landsat | Quickbird | Landsat | ||||
| Kappa | O.A. | Kappa | O.A. | ||||
| KMD | Bands 1,2,3,4, µ_b1, σ_b1, NDVI | Bands 1,3,4,5,7 NDVI | Linear | 0.90 | 94.89 | 0.78 | 83.63 |
| KMD | Bands 1,2,3,4, µ_b1, σ_b1, NDVI | Bands 1,3,4,5,7 NDVI | Polynomial | 0.83 | 87.32 | 0.80 | 86.12 |
| KMD | Bands 1,2,3,4, µ_b1, σ_b1, NDVI | Bands 1,3,4,5,7 NDVI | RBF | 0.92 | 96.73 | 0.77 | 83.14 |
| KMD | Bands 1,2,3,4, µ_b1, σ_b1, NDVI | Bands 1,3,4,5,7 NDVI | Sigmoid | 0.81 | 85.47 | 0.70 | 75.40 |
3.2.2. Proposed SVDD-Based CD Method
| CD Method | Input Bands | Kernel Type | Quickbird | Landsat | |||
|---|---|---|---|---|---|---|---|
| Quickbird | Landsat | Kappa | O.A. | Kappa | O.A. | ||
| SVDD-based | Bands 1,2,3,4, µ_b1, σ_b1, NDVI | Bands 1,3,4,5,7 NDVI | Linear | 0.86 | 90.28 | 0.84 | 90.54 |
| SVDD-based | Bands 1,2,3,4, µ_b1, σ_b1, NDVI | Bands 1,3,4,5,7 NDVI | Polynomial | 0.88 | 92.07 | 0.82 | 88.41 |
| SVDD-based | Bands 1,2,3,4, µ_b1, σ_b1, NDVI | Bands 1,3,4,5,7 NDVI | RBF | 0.91 | 95.28 | 0.90 | 96.22 |
| SVDD-based | Bands 1,2,3,4, µ_b1, σ_b1, NDVI | Bands 1,3,4,5,7 NDVI | Sigmoid | 0.80 | 84.11 | 0.74 | 79.35 |



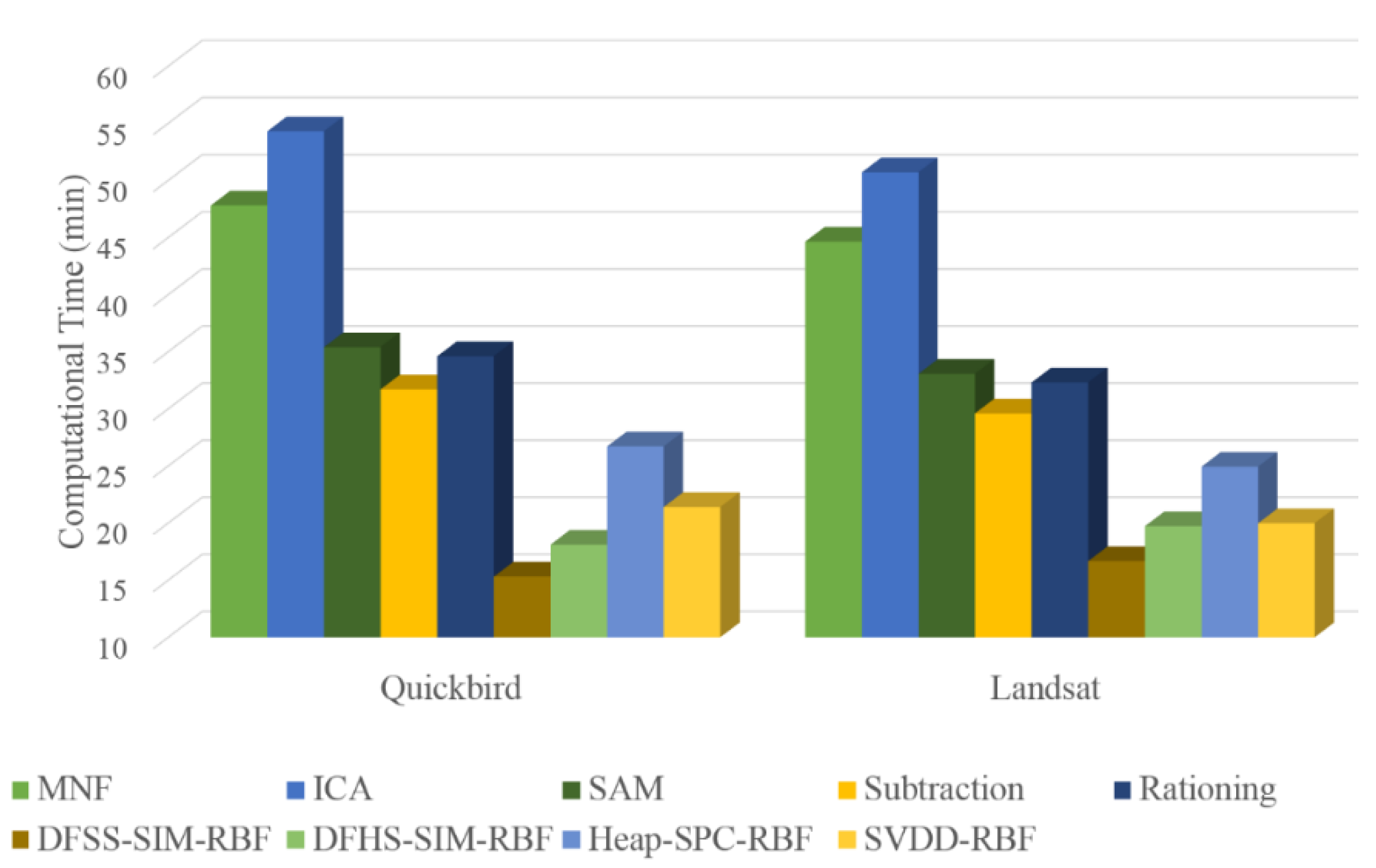
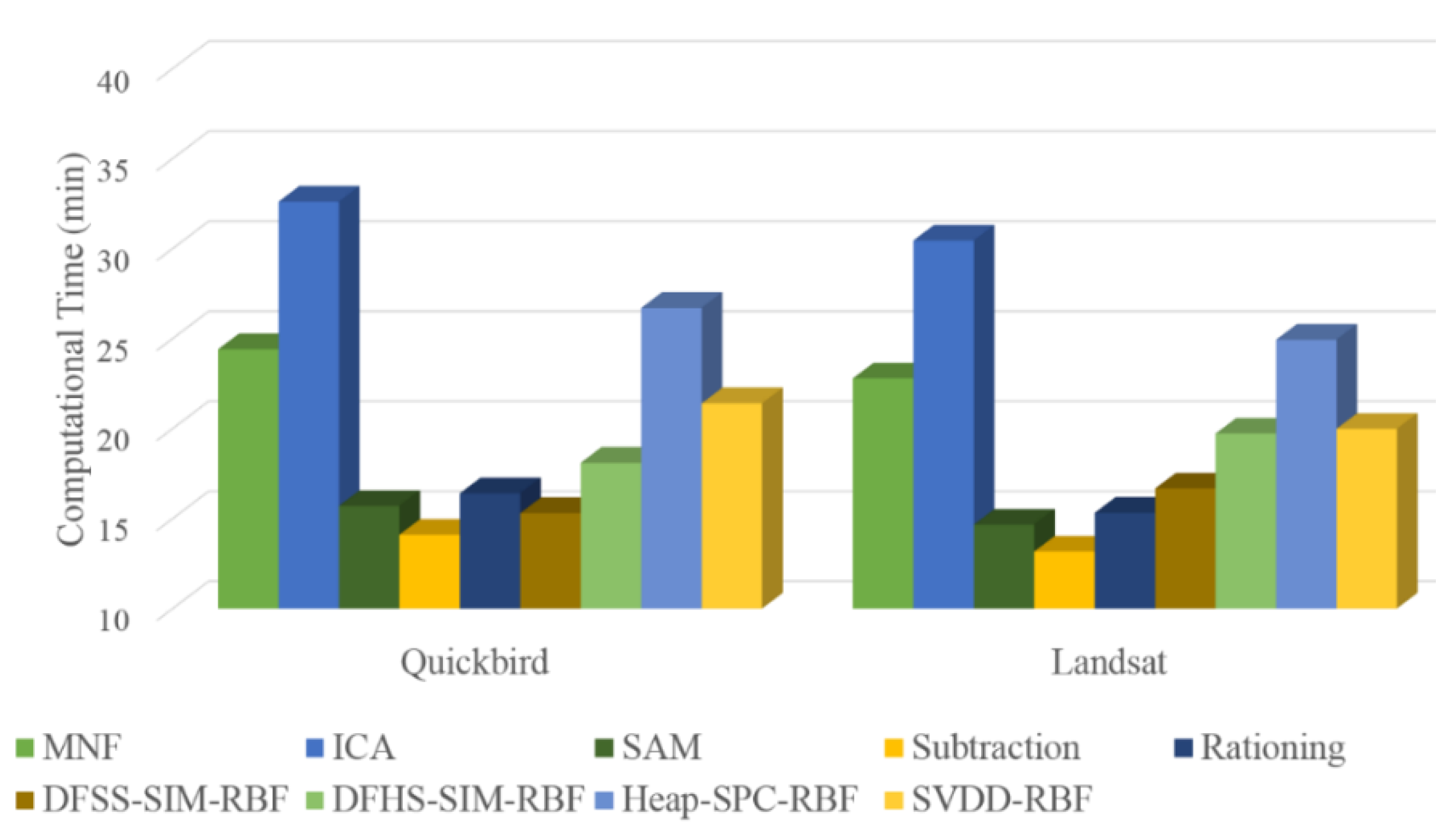
3.2.3. Conventional CD Method
| CD Method | Input Bands | Quickbird | Landsat | |||
|---|---|---|---|---|---|---|
| Quickbird | Landsat | |||||
| Kappa | O.A. | Kappa | O.A. | |||
| MNF Transform | Bands 1,2,3,4, µ_b1, σ_b1, NDVI | Bands 1,3,4,5,7 NDVI | 0.84 | 91.60 | 0.64 | 72.97 |
| ICA Transform | Bands 1,2,3,4, µ_b1, σ_b1, NDVI | Bands 1,3,4,5,7 NDVI | 0.68 | 85.48 | 0.66 | 75.54 |
| Spectral Angle Mapper | Bands 1,2,3,4, µ_b1, σ_b1, NDVI | Bands 1,3,4,5,7 NDVI | 0.60 | 75.38 | 0.77 | 87.80 |
| Image Subtraction | Bands 1,2,3,4, µ_b1, σ_b1, NDVI | Bands 1,3,4,5,7 NDVI | 0.69 | 86.57 | 0.61 | 69.40 |
| Image Rationing | Bands 1,2,3,4, µ_b1, σ_b1, NDVI | Bands 1,3,4,5,7 NDVI | 0.61 | 76.45 | 0.63 | 72.17 |
| DFSS-SIM-RBF | SDACV | SDACV | 0.90 | 94.39 | 0.89 | 95.67 |
| DFHS-SIM-RBF | SDACV | SDACV | 0.74 | 78.21 | 0.82 | 87.64 |
| Heap-SPC-RBF | Bands 1,2,3,4, µ_b1, σ_b1, NDVI | Bands 1,3,4,5,7 NDVI | 0.92 | 96.73 | 0.77 | 83.14 |
| SVDD-RBF | Bands 1,2,3,4, µ_b1, σ_b1, NDVI | Bands 1,3,4,5,7 NDVI | 0.91 | 95.28 | 0.90 | 96.22 |


4. Conclusions
Acknowledgements
Author Contributions
Conflicts of Interest
References
- Singh, A. Review article digital change detection techniques using remotely-sensed data. Int. J. Remote Sens. 1989, 10, 989–1003. [Google Scholar] [CrossRef]
- Volpi, M.; Tuia, D.; Camps-Valls, G.; Kanevski, M. Unsupervised change detection with kernels. IEEE Geosci. Remote Sens. Lett. 2012, 9, 1026–1030. [Google Scholar] [CrossRef]
- Yamazaki, F.; Matsuoka, M. Remote sensing technologies in post-disaster damage assessment. J. Earthq. Tsunami 2007, 1, 193–210. [Google Scholar] [CrossRef]
- Curatola Fernández, G.F.; Obermeier, W.A.; Gerique, A.; López Sandoval, M.F.; Lehnert, L.W.; Thies, B.; Bendix, J. Land cover change in the Andes of Southern Ecuador—Patterns and drivers. Remote Sens. 2015, 7, 2509–2542. [Google Scholar] [CrossRef]
- Tewkesbury, A.P.; Comber, A.J.; Tate, N.J.; Lamb, A.; Fisher, P.F. A critical synthesis of remotely sensed optical image change detection techniques. Remote Sens. Environ. 2015, 160, 1–14. [Google Scholar] [CrossRef]
- Olthof, I.; Fraser, R.H. Detecting landscape changes in high latitude environments using Landsat trend analysis: 2 Classification. Remote Sens. 2014, 6, 11558–11578. [Google Scholar] [CrossRef]
- Karnieli, A.; Qin, Z.; Wu, B.; Panov, N.; Yan, F. Spatio-temporal dynamics of land-use and land-cover in the Mu Us Sandy Land, China, using the change vector analysis technique. Remote Sens. 2014, 6, 9316–9339. [Google Scholar] [CrossRef]
- Dai, X.; Khorram, S. The effects of image misregistration on the accuracy of remotely sensed change detection. IEEE Trans. Geos. Remote Sens. 1998, 36, 1566–1577. [Google Scholar]
- Mas, J.-F. Monitoring land-cover changes: A comparison of change detection techniques. Int. J. Remote Sens. 1999, 20, 139–152. [Google Scholar] [CrossRef]
- Vittek, M.; Brink, A.; Donnay, F.; Simonetti, D.; Desclée, B. Land cover change monitoring using Landsat MSS/TM satellite image data over West Africa between 1975 and 1990. Remote Sens. 2014, 6, 658–676. [Google Scholar] [CrossRef] [Green Version]
- Lambin, E.F.; Strahlers, A.H. Change-vector analysis in multi-temporal space: A tool to detect and categorize land-cover change processes using high temporal-resolution satellite data. Remote Sens. Environ. 1994, 48, 231–244. [Google Scholar] [CrossRef]
- Camps-Valls, G.; Bruzzone, L. Kernel Methods for Remote Sensing Data Analysis; John Wiley and Sons: West Sussex, UK, 2009. [Google Scholar]
- Nemmour, H.; Chibani, Y. Multiple support vector machines for land cover change detection: An application for mapping urban extensions. ISPRS J. Photogramm. Remote Sens. 2006, 61, 125–133. [Google Scholar] [CrossRef]
- Li, X.; Yeh, A. Principal component analysis of stacked multi-temporal images for the monitoring of rapid urban expansion in the Pearl River Delta. Int. J. Remote Sens. 1998, 19, 1501–1518. [Google Scholar] [CrossRef]
- Pang, S.; Hu, X.; Wang, Z.; Lu, Y. Object-based analysis of airborne LiDAR data for building change detection. Remote Sens. 2014, 6, 10733–10749. [Google Scholar] [CrossRef]
- Zhou, J.; Yu, B.; Qin, J. Multi-level spatial analysis for change detection of urban vegetation at individual tree scale. Remote Sens. 2014, 6, 9086–9103. [Google Scholar] [CrossRef]
- Volpi, M.; Tuia, D.; Camps-Valls, G.; Kanevski, M. Unsupervised change detection by kernel clustering. Proc. SPIE 2010. [Google Scholar] [CrossRef]
- Bovolo, F.; Bruzzone, L.; Marconcini, M. An unsupervised change detection technique based on Bayesian initialization and semisupervised SVM. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium, Barcelona, Spain, 23–28 July 2007; pp. 2370–2373.
- Chen, C.-F.; Son, N.-T.; Chang, N.-B.; Chen, C.-R.; Chang, L.-Y.; Valdez, M.; Centeno, G.; Thompson, C.A.; Aceituno, J.L. Multi-decadal mangrove forest change detection and prediction in Honduras, Central America, with Landsat imagery and a Markov chain model. Remote Sens. 2013, 5, 6408–6426. [Google Scholar] [CrossRef]
- Chen, J.; Gong, P.; He, C.; Pu, R.; Shi, P. Land-use/land-cover change detection using improved change-vector analysis. Photogramm. Eng. Remote Sens. 2003, 69, 369–380. [Google Scholar] [CrossRef]
- Bruzzone, L.; Prieto, D.F. Automatic analysis of the difference image for unsupervised change detection. IEEE Trans. Geos. Remote Sens. 2000, 38, 1171–1182. [Google Scholar] [CrossRef]
- Molina, I.; Martinez, E.; Arquero, A.; Pajares, G.; Sanchez, J. Evaluation of a change detection methodology by MEANS of binary thresholding algorithms and informational fusion processes. Sensors 2012, 12, 3528–3561. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Inglada, J.; Mercier, G. A new statistical similarity measure for change detection in multi-temporal SAR images and its extension to multiscale change analysis. IEEE Trans. Geosci. Remote Sens. 2007, 45, 1432–1445. [Google Scholar] [CrossRef]
- Mercier, G.; Derrode, S.; Pieczynski, W.; Nicolas, J.-M.; Joannic-Chardin, A.; Inglada, J. Copula-based stochastic kernels for abrupt change detection. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium, Denver, CO, USA, 31 July 2006–4 August 2006; pp. 204–207.
- Pajares, G. A Hopfield neural network for image change detection. IEEE Trans. Neural Netw. 2006, 17, 1250–1264. [Google Scholar] [CrossRef] [PubMed]
- Aach, T.; Kaup, A. Bayesian algorithms for adaptive change detection in image sequences using Markov random fields. Signal Process. Image Commun. 1995, 7, 147–160. [Google Scholar] [CrossRef]
- Guorui, M.; Haigang, S.; Pingxiang, L.; Qianqing, Q. A kernel change detection algorithm in remote sense imagery. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium, Denver, CO, USA, 31 July 2006–4 August 2006; pp. 220–224.
- Camps-Valls, G.; Gomez-Chova, L.; Munoz-Mari, J.; Rojo-Alvarez, J.L.; Martinez-Ramon, M. Kernel-based framework for multi-temporal and multisource remote sensing data classification and change detection. IEEE Trans. Geosci. Remote Sens. 2008, 46, 1822–1835. [Google Scholar] [CrossRef]
- Longbotham, N.; Pacifici, F.; Glenn, T.; Zare, A.; Volpi, M.; Tuia, D.; Christophe, E.; Michel, J.; Inglada, J.; Chanussot, J.; et al. Multi-modal change detection, application to the detection of flooded areas: Outcome of the 2009–2010 data fusion contest. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2012, 5, 331–342. [Google Scholar] [CrossRef]
- Carlotto, M.J. Detection and analysis of change in remotely sensed imagery with application to wide area surveillance. IEEE Trans. Image Process. 1997, 6, 189–202. [Google Scholar] [CrossRef] [PubMed]
- Qin, R. An object-based hierarchical method for change detection using unmanned aerial vehicle images. Remote Sens. 2014, 6, 7911–7932. [Google Scholar] [CrossRef]
- Aleksandrowicz, S.; Turlej, K.; Lewiński, S.; Bochenek, Z. Change detection algorithm for the production of land cover change maps over the European Union Countries. Remote Sens. 2014, 6, 5976–5994. [Google Scholar] [CrossRef]
- Hosseini, R.S.; Homayouni, S.; Safari, R. Modified algorithm based on support vector machines for classification of hyperspectral images in a similarity space. J. Appl. Remote Sens. 2012, 6, 063550-1. [Google Scholar] [CrossRef]
- Hosseini, R.S.; Homayouni, S. A SVMS-based hyperspectral data classification algorithm in a similarity space. In Proceedings of the Hyperspectral Image and Signal Processing: Evolution in Remote Sensing, Grenoble, France, 26–28 August 2009; pp. 1–4.
- Camps-Valls, G.; Gomez-Chova, L.; Muñoz-Mari, J.; Alonso, L.; Calpe-Maravilla, J.; Moreno, J. Multi-temporal image classification and change detection with kernels. In Proceedings of the Image and Signal Processing for Remote Sensing XII, Stockholm, Sweden, 11 September 2006.
- Shah Hosseini, R.; Entezari, I.; Homayouni, S.; Motagh, M.; Mansouri, B. Classification of polarimetric SAR images using support vector machines. Can. J. Remote Sens. 2011, 37, 220–233. [Google Scholar] [CrossRef]
- Bovolo, F.; Camps-Valls, G.; Bruzzone, L. A support vector domain method for change detection in multi-temporal images. Pattern Recognit. Lett. 2010, 31, 1148–1154. [Google Scholar] [CrossRef]
- Khediri, I.B.; Weihs, C.; Limam, M. Kernel k-means clustering based local support vector domain description fault detection of multimodal processes. Expert Syst. Appl. 2012, 39, 2166–2171. [Google Scholar] [CrossRef]
- Shen, Z.; He, Z.; Chen, X.; Sun, C.; Liu, Z. A monotonic degradation assessment index of rolling bearings using fuzzy support vector data description and running time. Sensors 2012, 12, 10109–10135. [Google Scholar] [CrossRef] [PubMed]
- Fung, G.M.; Mangasarian, O.L.; Smola, A.J. Minimal kernel classifiers. J. Mach. Learn. Res. 2003, 3, 303–321. [Google Scholar]
- Chang, C.-I. Hyperspectral Imaging: Techniques for Spectral Detection and Classification; Springer Science and Business Media: Baltimore, MD, USA, 2003. [Google Scholar]
- Alberga, V. Similarity measures of remotely sensed multi-sensor images for change detection applications. Remote Sens. 2009, 1, 122–143. [Google Scholar] [CrossRef]
- Carvalho Júnior, O.A.; Guimarães, R.F.; Gillespie, A.R.; Silva, N.C.; Gomes, R.A. A new approach to change vector analysis using distance and similarity measures. Remote Sens. 2011, 3, 2473–2493. [Google Scholar] [CrossRef]
- Homayouni, S.; Roux, M. Material mapping from hyperspectral images using spectral matching in urban area. In Proceedings of the IEEE Workshop on Advances in Techniques for analysis of Remotely Sensed Data, Washington, DC, USA, 27–28 October 2003.
- Goela, N.; Wilson, K.W.; Niu, F.; Divakaran, A.; Otsuka, I. An SVM framework for genre-independent scene change detection. In Proceedings of the 2007 IEEE International Conference on Multimedia and Expo, Beijing, China, 2–5 July 2007; pp. 532–535.
- Mercier, G.; Lennon, M. Support vector machines for hyperspectral image classification with spectral-based kernels. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium, Toulouse, France, 21–25 July 2003; Volume 1, pp. 288–290.
- PCI GEOMATICS. Available online: http://www.pcigeomatics.com/resources-support/geomatica/tutorials (accessed on 21 September 2015).
- Wikipedia. The Free Encyclopedia 2004 Indian Ocean Earthquake and Tsunami. Available online: http://en.wikipedia.org/wiki/2004_Indian_Ocean_earthquake_and_tsunami#cite_note-Paris-8 (accessed on 21 September 2015).
- Exelis VIS Product Documentation Center. Available online: http://www.exelisvis.com/docs/ImageChangeTutorial.html (accessed on 21 September 2015).
- Zhang, L.; Liao, M.; Yang, L.; Lin, H. Remote sensing change detection based on canonical correlation analysis and contextual Bayes decision. Photogramm. Eng. Remote Sens. 2007, 73, 311–318. [Google Scholar] [CrossRef]
- Marchesi, S.; Bruzzone, L. ICA and kernel ICA for change detection in multispectral remote sensing images. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium, Cape Town, South Africa, 12–17 July 2009.
- Yuhas, R.H.; Goetz, A.F.; Boardman, J.W. Discrimination among semi-arid landscape endmembers using the spectral angle mapper (SAM) algorithm. In Summaries of the Third Annual JPL Airborne Geoscience Workshop; JPL Publication: Pasadena, CA, USA, 1992; Volume 1, pp. 147–149. [Google Scholar]
- Kano, A.; Doi, K.; MacMahon, H.; Hassell, D.D.; Giger, M.L. Digital image subtraction of temporally sequential chest images for detection of interval change. Med. Phys. 1994, 21, 453–461. [Google Scholar] [CrossRef] [PubMed]
- Berberoglu, S.; Akin, A. Assessing different remote sensing techniques to detect land use/cover changes in the eastern Mediterranean. Int. J. Appl. Earth Obs. Geoinf. 2009, 11, 46–53. [Google Scholar] [CrossRef]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shah-Hosseini, R.; Homayouni, S.; Safari, A. A Hybrid Kernel-Based Change Detection Method for Remotely Sensed Data in a Similarity Space. Remote Sens. 2015, 7, 12829-12858. https://doi.org/10.3390/rs71012829
Shah-Hosseini R, Homayouni S, Safari A. A Hybrid Kernel-Based Change Detection Method for Remotely Sensed Data in a Similarity Space. Remote Sensing. 2015; 7(10):12829-12858. https://doi.org/10.3390/rs71012829
Chicago/Turabian StyleShah-Hosseini, Reza, Saeid Homayouni, and Abdolreza Safari. 2015. "A Hybrid Kernel-Based Change Detection Method for Remotely Sensed Data in a Similarity Space" Remote Sensing 7, no. 10: 12829-12858. https://doi.org/10.3390/rs71012829