Combining UAV-Based SfM-MVS Photogrammetry with Conventional Monitoring to Set Environmental Flows: Modifying Dam Flushing Flows to Improve Alpine Stream Habitat


Abstract
:
1. Introduction
2. Environmental Flows in Alpine Streams: A Role for Geospatial Technologies
3. Materials and Methods
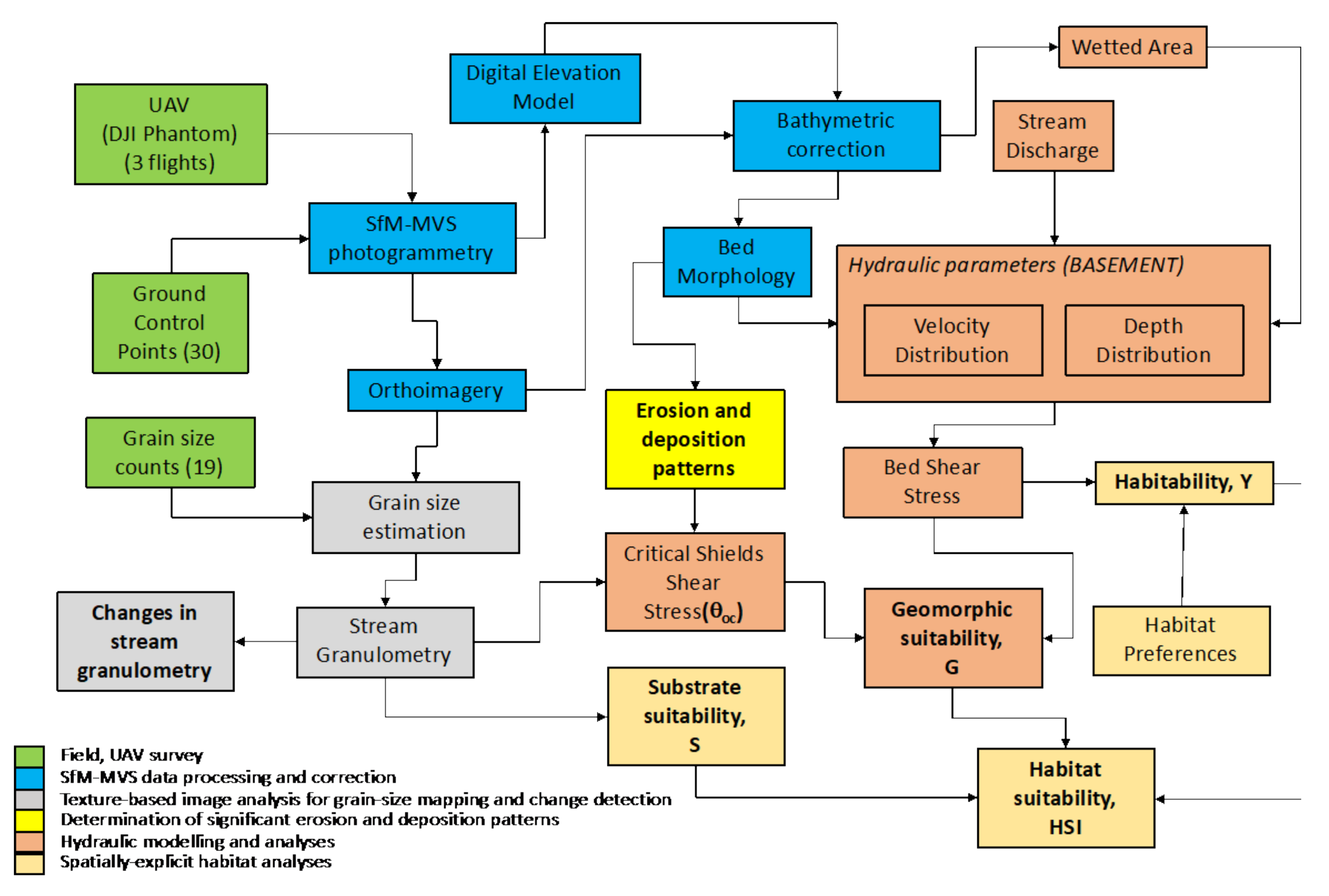
3.1. Methodological Approach
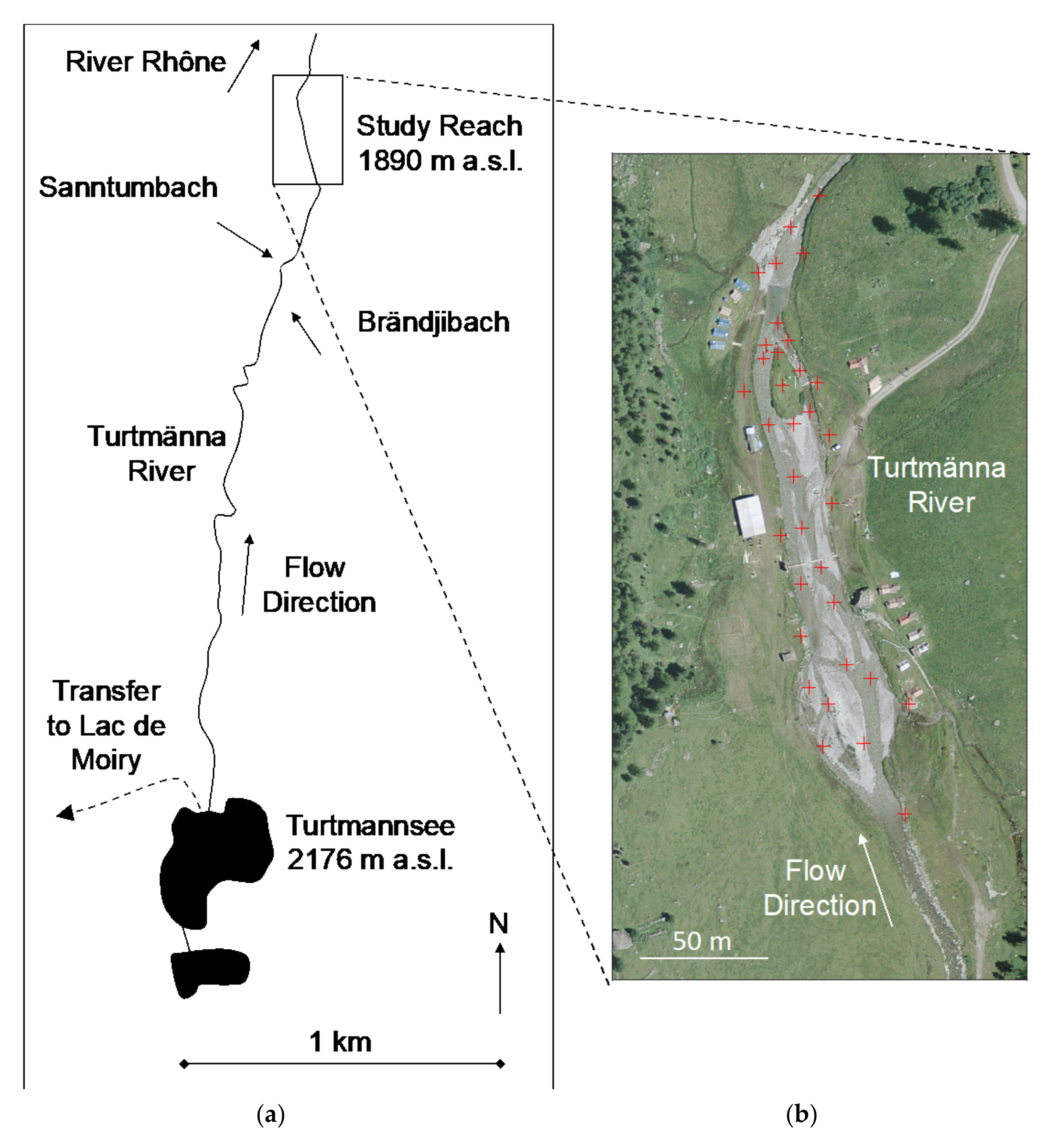
3.2. The Test Case: the Gravel-Bedded Turtmanna River, Switzerland
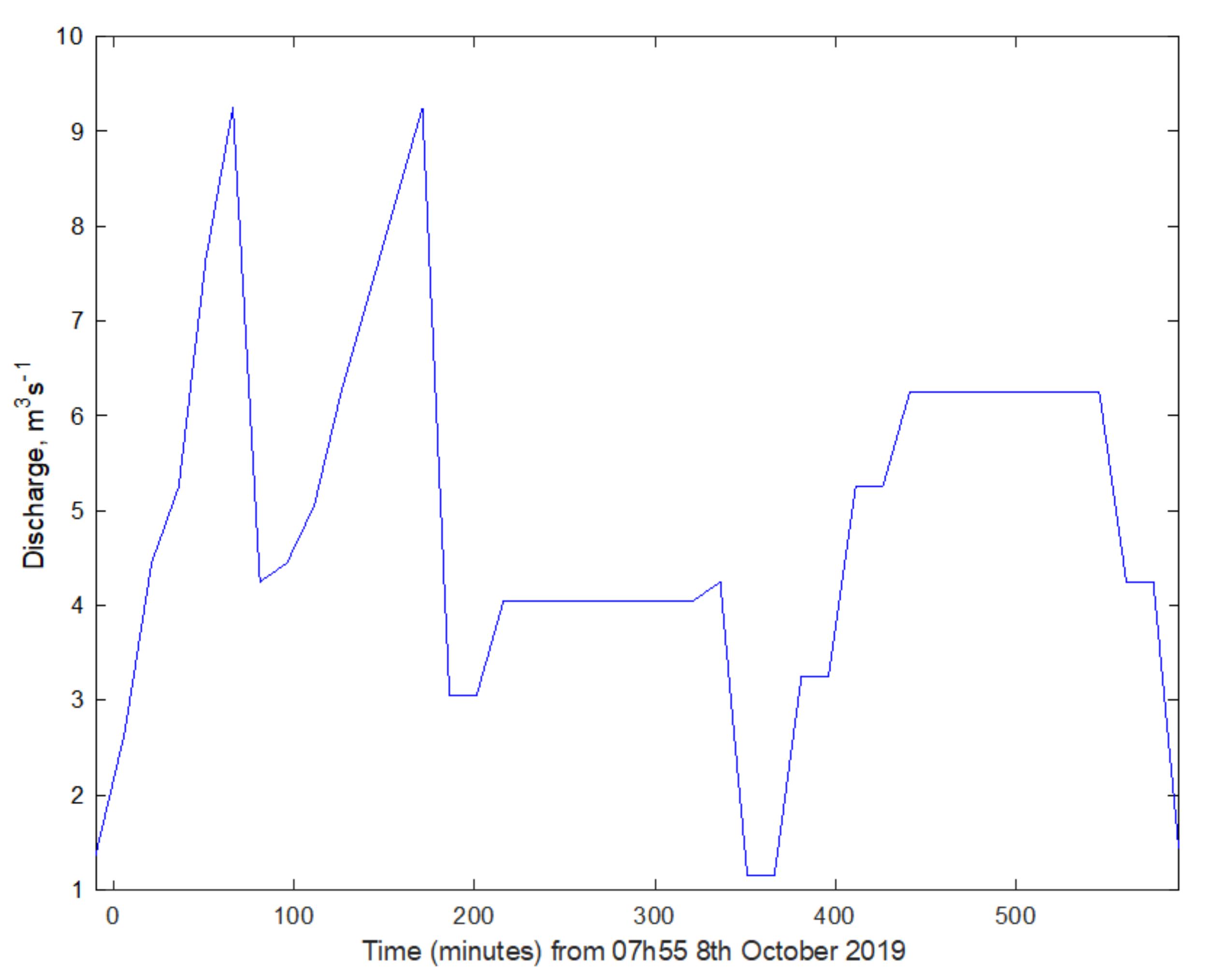
3.3. The Modified Flushing Flow (MFF)
3.4. Conventional Monitoring
3.5. UAV Image Acquisition
3.6. Image Calibration, Generation of Point Clouds and Orthoimagery, and Bathymetric Correction
3.7. Hydrodynamic Modeling
- From 0.05 m3·s−1 to 0.10 m3·s−1, we simulated every 0.01 m3·s−1;
- From 0.10 m3·s−1 to 0.50 m3·s−1, we simulated every 0.05 m3·s−1;
- From 0.50 m3·s−1 to 1.00 m3·s−1, we simulated every 0.10 m3·s−1;
- From 1.00 m3·s−1 to 5.00 m3·s−1, we simulated every 0.20 m3·s−1;
- From 5.00 m3·s−1 to 9.40 m3·s−1, we simulated every 0.40 m3·s−1.
3.8. Quantification of the Likelihood of Bed Break Up
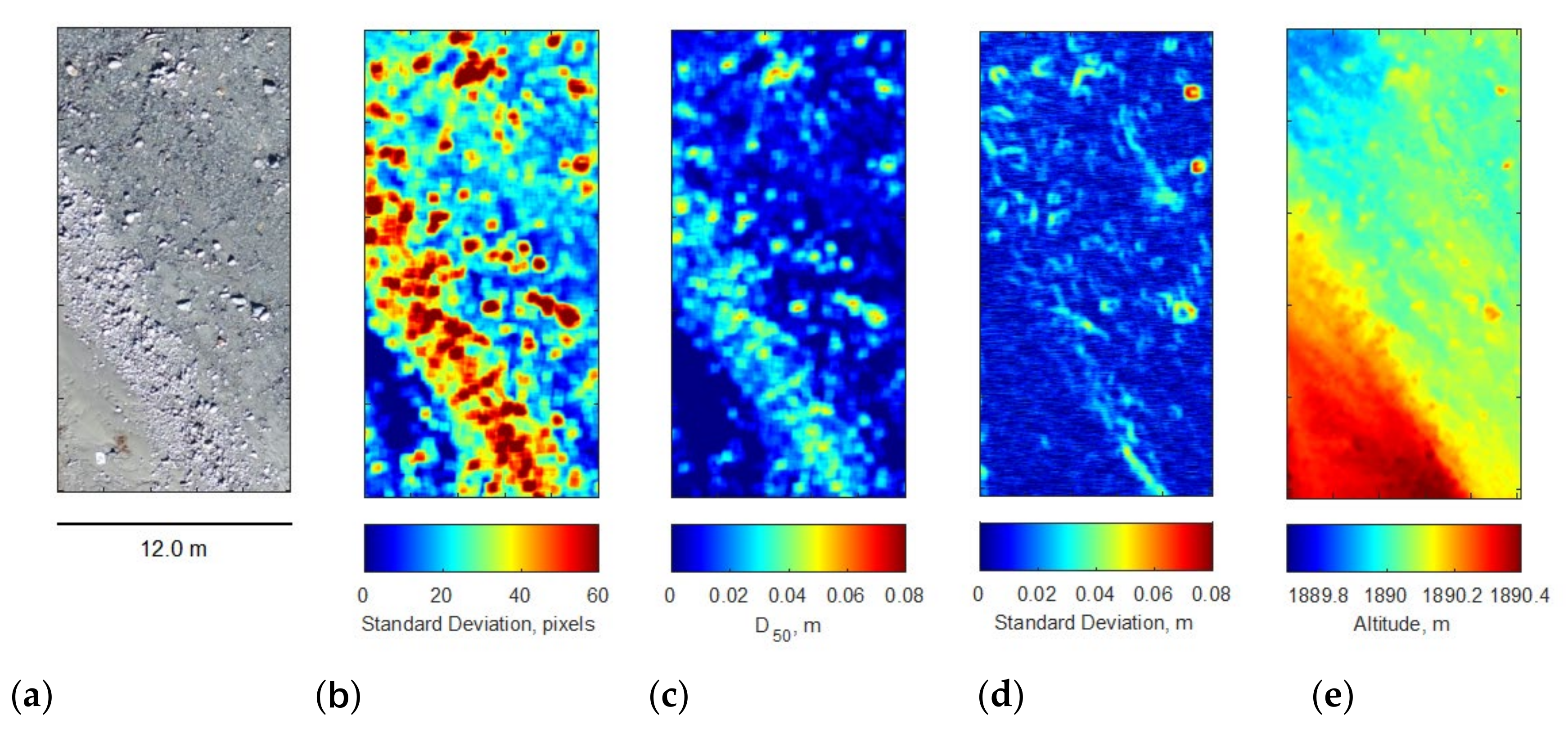
3.9. Grain-Size Estimation
3.10. Hydraulic Habitat Modeling
3.11. Biological Sampling, Habitability, and Substrate Suitability Rules
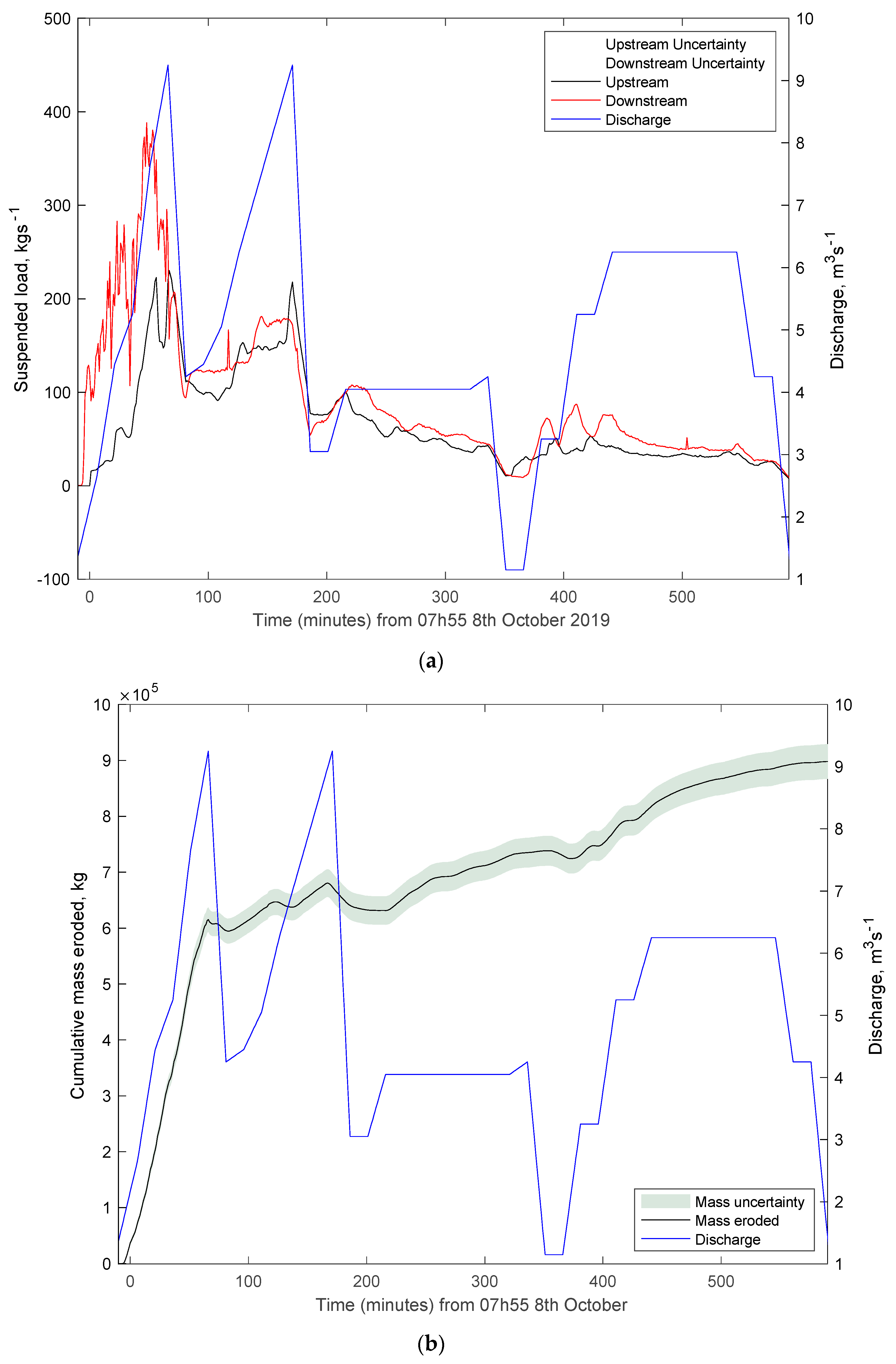
4. Discharge, Instantaneous Load, Cumulative Load, and Biological Monitoring
4.1. Results
4.2. Discussion
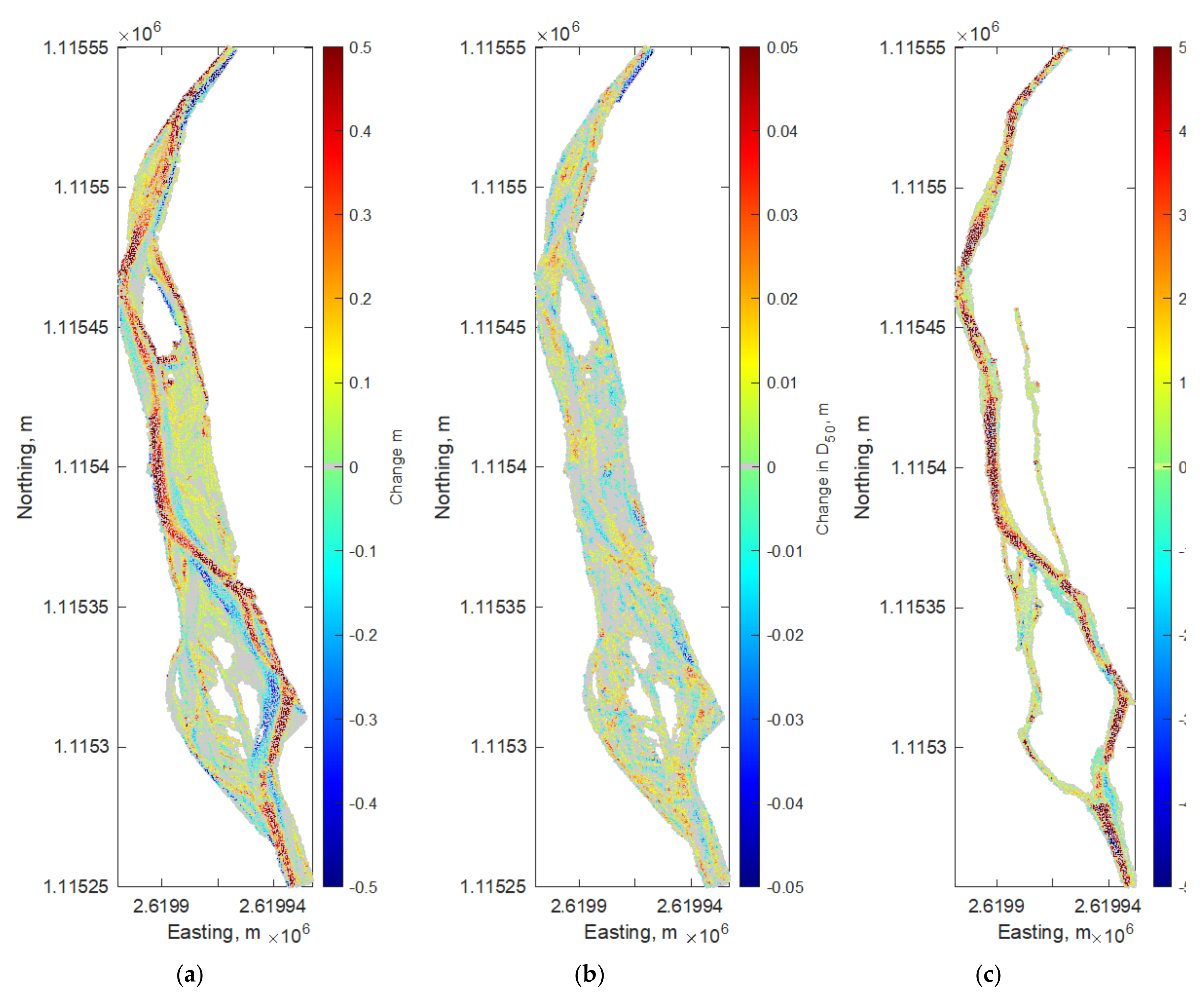
5. Channel Change, Sedimentological Change, and Habitat during the MFF: UAV-Derived Data
5.1. Results
5.2. Discussion
6. The Role of UAV SfM-MVS Photogrammetry in Setting Environmental Flows
7. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Parasiewicz, P.; Schmutz, S.; Moog, O. The effect of managed hydropower peaking on the physical habitat, benthos and fish fauna in the River Bregenzerach in Austria. Fish. Manag. Ecol. 1998, 5, 403–417. [Google Scholar] [CrossRef]
- Bunn, S.E.; Arthington, A.H. Basic Principles and Ecological Consequences of Altered Flow Regimes for Aquatic Biodiversity. Environ. Manag. 2002, 30, 492–507. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Poff, N.L.; Zimmerman, J.K.H. Ecological responses to altered flow regimes: A literature review to inform the science and management of environmental flows. Freshw. Biol. 2010, 55, 194–205. [Google Scholar] [CrossRef]
- Poff, N.L.; Allan, J.D.; Bain, M.B.; Karr, J.R.; Prestegaard, K.L.; Richter, B.D.; Sparks, R.E.; Stromberg, J.C. The Natural Flow Regime. Bioscience 1997, 47, 769–784. [Google Scholar] [CrossRef]
- The Brisbane Declaration. Environmental Flows are Essential for Freshwater Ecosystem Health and Human Well-Being. In Proceedings of the 10th International River Symposium and International Environmental Flows Conference, Brisbane, Australia, 3–6 September 2007.
- Dyson, M.; Bergkamp, G.; Scanlon, J. Flow: The Essentials of Environmental Flows; IUCN: Gland, Switzerland; Cambridge, UK, 2003. [Google Scholar]
- Petts, G.E. Instream Flow Science For Sustainable River Management. JAWRA J. Am. Water Resour. Assoc. 2009, 45, 1071–1086. [Google Scholar] [CrossRef] [Green Version]
- Arthington, A.H. Environmental Flows: Saving Rivers in the Third Millennium; University of California Press: Berkeley, CA, USA, 2012. [Google Scholar]
- Whipple, A.A.; Viers, J. Coupling landscapes and river flows to restore highly modified rivers. Water Resour. Res. 2019, 55, 4512. [Google Scholar] [CrossRef]
- Ashworth, P.J.; Ferguson, R.I. Interrelationships of channel processes, changes and sediments in a proglacial braided river, Geografiska Annaler: Series A. Phys. Geogr. 1986, 68, 361–371. [Google Scholar]
- Lancaster, J.; Hildrew, A.G. Flow Refugia and the Microdistribution of Lotic Macroinvertebrates. J. N. Am. Benthol. Soc. 1993, 12, 385–393. [Google Scholar] [CrossRef]
- Möbes-Hansen, B.; Waringer, J.A. The Influence of Hydraulic Stress on Microdistribution Patterns of Zoobenthos in a Sandstone Brook (Weidlingbach, Lower Austria). Int. Rev. Hydrobiol. 1998, 83, 381–396. [Google Scholar] [CrossRef]
- Armstrong, J.; Kemp, P.; Kennedy, G.; Ladle, M.; Milner, N. Habitat requirements of Atlantic salmon and brown trout in rivers and streams. Fish. Res. 2003, 62, 143–170. [Google Scholar] [CrossRef]
- Merigoux, S.; Doledec, S. Hydraulic requirements of stream communities: A case study on invertebrates. Freshw. Biol. 2004, 49, 600–613. [Google Scholar] [CrossRef]
- Dolédec, S.; Lamouroux, N.; Fuchs, U.; Mérigoux, S. Modelling the hydraulic preferences of benthic macroinvertebrates in small European streams. Freshw. Biol. 2007, 52, 145–164. [Google Scholar] [CrossRef]
- Mérigoux, S.; Lamouroux, N.; Olivier, J.-M.; Dolédec, S. Invertebrate hydraulic preferences and predicted impacts of changes in discharge in a large river. Freshw. Biol. 2009, 54, 1343–1356. [Google Scholar] [CrossRef]
- Wood, P.J.; Toone, J.; Greenwood, M.T.; Armitage, P.D. The response of four lotic macroinvertebrate taxa to burial by sediments. Archiv. für Hydrobiol. 2005, 163, 145–162. [Google Scholar] [CrossRef]
- Conroy, E.; Turner, J.N.; Rymszewicz, A.; Bruen, M.; O’Sullivan, J.J.; Lawler, D.M.; Stafford, S.; Kelly-Quinn, M. Further insights into the responses of macroinvertebrate species to burial by sediment. Hydrobiologia 2017, 805, 399–411. [Google Scholar] [CrossRef]
- Wharton, G.; Mohajeri, S.H.; Righetti, M. The pernicious problem of streambed colmation: A multi-disciplinary reflection on the mechanisms, causes, impacts, and management challenges. WIREs Water 2017, 4, e1231. [Google Scholar] [CrossRef]
- Orr, C.H.; Kroiss, S.J.; Rogers, K.L.; Stanley, E.H. Downstream benthic responses to small dam removal in a coldwater stream. River Res. Appl. 2008, 24, 804–822. [Google Scholar] [CrossRef]
- Müller, M.P.; McKnight, D.M.; Cullis, J.D.; Greene, A.; Vietti, K.; Liptzin, D. Factors controlling streambed coverage of Didymosphenia germinate in two regulated streams in the Colorado front range. Hydrobiologia 2009, 630, 207–218. [Google Scholar] [CrossRef] [Green Version]
- Fuller, R.L.; Doyle, S.; Levy, L.; Owens, J.; Shope, E.; Vo, L.; Wolyniak, E.; Small, M.J.; Doyle, M.W. Impact of regulated releases on periphyton and macroinvertebrate communities: The dynamic relationship between hydrology and geomorphology in frequently flooded rivers. River Res. Appl. 2010, 27, 630–645. [Google Scholar] [CrossRef]
- Cullis, J.D.S.; Stanish, L.F.; McKnight, D.M. Diel flow pulses drive particulate organic matter transport from microbial mats in a glacial meltwater stream in the McMurdo Dry Valleys. Water Resour. Res. 2014, 50, 86–97. [Google Scholar] [CrossRef]
- Wohl, E.; Bledsoe, B.P.; Jacobson, R.B.; Poff, N.L.; Rathburn, S.L.; Walters, D.M.; Wilcox, A.C. The Natural Sediment Regime in Rivers: Broadening the Foundation for Ecosystem Management. Bioscience 2015, 65, 358–371. [Google Scholar] [CrossRef] [Green Version]
- Gabbud, C.; Bakker, M.; Clemençon, M.; Lane, S.N. Causes of the severe loss of macrozoobenthos in Alpine streams subject to repeat hydropower flushing events. Water Resour. Res. 2019, 55, 10056–10081. [Google Scholar] [CrossRef]
- Bovee, K.; Millhous, R. Hydraulic Simulation in Instream Flow Studies: Theory and Techniques; FWS/OBS-78/33; US Fish and Wildlife Service: Washington, DC, USA, 1978. [Google Scholar]
- Ghanem, A.; Steffler, P.; Hicks, F.; Katopodis, C. Two-dimensional finite element flow modeling of physical fish habitat. In Proceedings of the 1st International Association for Hydraulic Research Symposium on Habitat Hydraulics, Trondheim, Norway, 18–20 August 1994; Norwegian Institute of Technology: Trondheim, Norway, 1994; pp. 84–89. [Google Scholar]
- Leclerc, M.; Boudreault, A.; Bechara, T.A.; Corfa, G. Two-Dimensional Hydrodynamic Modeling: A Neglected Tool in the Instream Flow Incremental Methodology. Trans. Am. Fish. Soc. 1995, 124, 645–662. [Google Scholar] [CrossRef]
- Hardy, T.B. The future of habitat modeling and instream flow assessment techniques. Regul. Riv. Res. Manag. 1998, 14, 405–420. [Google Scholar] [CrossRef]
- Benjankar, R.; Tonina, D.; McKean, J.A. One-dimensional and two-dimensional hydrodynamic modeling derived flow properties: Impacts on aquatic habitat quality predictions. Earth Surf. Process. Landf. 2014, 40, 340–356. [Google Scholar] [CrossRef]
- Leclerc, M. Ecohydraulics: A new interdisciplinary frontier for CFD. In Computational Fluid Dynamics: Applications in Environmental Hydraulics; Bates, P.D., Lane, S.N., Ferguson, R.I., Eds.; Wiley: Chichester, UK, 2005; pp. 429–459. [Google Scholar]
- Lane, S.N.; Chandler, J.H.; Richards, K.S. Developments in monitoring and terrain modelling small-scale river-bed topography. Earth Surface Process Landf. 1994, 19, 349–368. [Google Scholar] [CrossRef]
- Westaway, R.M.; Lane, S.N.; Hicks, D.M. The development of an automated correction procedure for digital photogrammetry for the study of wide, shallow, gravel-bed rivers. Earth Surface Process Landf. 2000, 25, 209–226. [Google Scholar] [CrossRef]
- Westaway, R.M.; Lane, S.N.; Hicks, D.M. Remote sensing of clearwater, shallow, gravel-bed rivers using digital photogrammetry. Photogramm. Eng. Remote Sens. 2001, 67, 1271–1282. [Google Scholar]
- Westaway, R.M.; Stutenbecker, L.; Hicks, D.M. Remote survey of large-scale braided, gravel-bed rivers using digital photogrammetry and image analysis. Int. J. Remote Sens. 2003, 24, 795–815. [Google Scholar] [CrossRef]
- Lane, S.N.; Widdison, P.E.; Thomas, R.E.; Ashworth, P.J.; Best, J.; Lunt, I.A.; Smith, G.H.S.; Simpson, C.J. Quantification of braided river channel change using archival digital image analysis. Earth Surf. Process. Landf. 2010, 35, 971–985. [Google Scholar] [CrossRef]
- Kinzel, P.J.; Legleiter, C.J.; Nelson, J.M. Mapping River Bathymetry With a Small Footprint Green LiDAR: Applications and Challenges1. JAWRA J. Am. Water Resour. Assoc. 2012, 49, 183–204. [Google Scholar] [CrossRef]
- Mandlburger, G.; Hauer, C.; Wieser, M.; Pfeifer, N. Topo-bathymetric LiDAR for monitoring river morphodynamics and instream Hhbitats—A case study at the Pielach River. Remote Sens. 2015, 7, 6160–6195. [Google Scholar] [CrossRef] [Green Version]
- McKean, J.A.; Tonina, D.; Bohn, C.; Wright, C. Effects of bathymetric lidar errors on flow properties predicted with a multi-dimensional hydraulic model. J. Geophys. Res. Earth Surf. 2014, 119, 644–664. [Google Scholar] [CrossRef]
- Tonina, D.; Mckean, J.A.; Benjankar, R.M.; Wright, C.W.; Goode, J.R.; Chen, Q.; Reeder, W.J.; Carmichael, R.A.; Edmondson, M.R. Mapping river bathymetries: Evaluating topobathymetric LiDAR survey. Earth Surf. Process. Landf. 2019, 44, 507–520. [Google Scholar] [CrossRef]
- Tonina, D.; Mckean, J.A.; Benjankar, R.M.; Yager, E.; Carmichael, R.A.; Chen, Q.; Carpenter, A.; Kelsey, L.G.; Edmondson, M.R. Evaluating the performance of topobathymetric LiDAR to support multi-dimensional flow modelling in a gravel-bed mountain stream. Earth Surf. Process. Landforms 2020. [Google Scholar] [CrossRef]
- Lane, S.N. Acting, predicting and intervening in a socio-hydrological world. Hydrol. Earth Syst. Sci. 2014, 18, 927–952. [Google Scholar] [CrossRef] [Green Version]
- Gardner, J.T.; Ashmore, P. Geometry and grain-size characteristics of the basal surface of a braided river deposit. Geology 2011, 39, 247–250. [Google Scholar] [CrossRef]
- Leduc, P.; Ashmore, P.; Gardner, J.T. Grain sorting in the morphological active layer of a braided river physical model. Earth Surface Dyn. 2015, 3, 577–585. [Google Scholar]
- Reid, H.; Williams, R.D.; Brierley, G.; Coleman, S.; Lamb, R.; Rennie, C.D.; Tancock, M. Geomorphological effectiveness of floods to rework gravel bars: Insight from hyperscale topography and hydraulic modelling. Earth Surf. Process. Landforms 2018, 44, 595–613. [Google Scholar] [CrossRef]
- Newson, M.D.; Newson, C.L. Geomorphology, ecology and river channel habitat: Mesoscale approaches to basin-scale challenges. Prog. Phys. Geogr. Earth Environ. 2000, 24, 195–217. [Google Scholar] [CrossRef]
- Carbonneau, P.E.; Bergeron, N.E.; Lane, S.N. Texture based image segmentation applied to the quantification of superficial sand in salmonid river gravels. Earth Surface Process. Landf. 2005, 30, 121–127. [Google Scholar] [CrossRef]
- Carbonneau, P.E.; Lane, S.N.; Bergeron, N.E. Catchment-scale mapping of surface grain size in gravel bed rivers using airborne digital imagery. Water Resour. Res. 2004, 40. [Google Scholar] [CrossRef] [Green Version]
- Carbonnneau, P.; Bizzi, S.; Marchetti, G. Robotic photosieving from low-cost multirotor sUAS: A proof-of-concept. Earth Surf. Process. Landf. 2018, 43, 1160–1166. [Google Scholar] [CrossRef] [Green Version]
- Buscombe, D.; Rubin, D.M.; Warrick, J.A. A universal approximation of grain size from images of noncohesive sediment. J. Geophys. Res. Space Phys. 2010, 115. [Google Scholar] [CrossRef] [Green Version]
- Dugdale, S.J.; Carbonneau, P.E.; Campbell, D. Aerial photosieving of exposed gravel bars for the rapid calibration of airborne grain size maps. Earth Surf. Process. Landf. 2010, 35, 627–639. [Google Scholar] [CrossRef]
- Black, M.; Carbonneau, P.; Church, M.; Warburton, J. Mapping sub-pixel fluvial grain sizes with hyperspatial imagery. Sedimentology 2013, 61, 691–711. [Google Scholar] [CrossRef] [Green Version]
- Woodget, A.S.; Austrums, R. Subaerial gravel size measurement using topographic data derived from a UAV-SfM approach. Earth Surf. Process. Landf. 2017, 42, 1434–1443. [Google Scholar] [CrossRef]
- Woodget, A.S.; Fyffe, C.L.; Carbonneau, P.E. From manned to unmanned aircraft: Adapting airborne particle size mapping methodologies to the characteristics of sUAS and SfM. Earth Surf. Process. Landf. 2018, 43, 857–870. [Google Scholar] [CrossRef]
- Buscombe, D. SediNet: A configurable deep learning model for mixed qualitative and quantitative optical granulometry. Earth Surf. Process. Landf. 2020, 45, 638–651. [Google Scholar] [CrossRef]
- Gabbud, C.; Lane, S.N. Ecosystem impacts of Alpine water intakes for hydropower: The challenge of sediment management. Wiley Interdiscip. Rev. Water 2015, 3, 41–61. [Google Scholar] [CrossRef]
- Bakker, M.; Costa, A.; Silva, T.A.; Stutenbecker, L.; Girardclos, S.; Loizeau, J.-L.; Molnar, P.; Schlunegger, F.; Lane, S.N. Combined Flow Abstraction and Climate Change Impacts on an Aggrading Alpine River. Water Resour. Res. 2018, 54, 223–242. [Google Scholar] [CrossRef]
- Brooker, M.P.; Hemsworth, R.J. The effect of the release of an artificial discharge of water on invertebrate drift in the R. Wye, Wales. Hydrobiology 1978, 59, 155–163. [Google Scholar] [CrossRef]
- Cushman, R.M. Review of Ecological Effects of Rapidly Varying Flows Downstream from Hydroelectric Facilities. N. Am. J. Fish. Manag. 1985, 5, 330–339. [Google Scholar] [CrossRef]
- Moog, O. Quantification of daily peak hydropower effects on aquatic fauna and management to minimize environmental impacts. Regul. Rivers Res. Manag. 1993, 8, 5–14. [Google Scholar] [CrossRef]
- Lauters, F.; Lavandier, P.; Lim, P.; Sabaton, C.; Belaud, A. Influence of hydropeaking on invertebrates and their relationship with fish feeding habits in a Pyrenean river. Regul. Riv. Res. Manag. 1996, 12, 563–573. [Google Scholar] [CrossRef]
- Cereghino, R.; Lavandier, P. Influence of hypolimnetic hydropeaking on the distribution and population dynamics of Ephemeroptera in a mountain stream. Freshw. Biol. 1998, 40, 385–399. [Google Scholar] [CrossRef] [Green Version]
- Smokorowski, K.E.; Metcalfe, R.A.; Finucan, S.D.; Jones, N.; Marty, J.; Power, M.; Pyrce, R.S.; Steele, R. Ecosystem level assessment of environmentally based flow restrictions for maintaining ecosystem integrity: A comparison of a modified peaking versus unaltered river. Ecohydrology 2010, 4, 791–806. [Google Scholar] [CrossRef]
- Schmutz, S.; Bakken, T.H.; Friedrich, T.; Greimel, F.; Harby, A.; Jungwirth, M.; Melcher, A.; Unfer, G.; Zeiringer, B. Response of Fish Communities to Hydrological and Morphological Alterations in Hydropeaking Rivers of Austria. River Res. Appl. 2014, 31, 919–930. [Google Scholar] [CrossRef] [Green Version]
- Schülting, L.; Feld, C.K.; Graf, W. Effects of hydro- and thermopeaking on benthic macroinvertebrate drift. Sci. Total Environ. 2016, 573, 1472–1480. [Google Scholar] [CrossRef]
- Schülting, L.; Feld, C.K.; Zeiringer, B.; Huđek, H.; Graf, W. Macroinvertebrate drift response to hydropeaking: An experimental approach to assess the effect of varying ramping velocities. Ecohydrology 2018, 12, e2032. [Google Scholar] [CrossRef]
- Gabbud, C.; Robinson, C.T.; Lane, S.N. Summer is in winter: Disturbance-driven shifts in macroinvertebrate communities following hydroelectric power exploitation. Sci. Total Environ. 2019, 650, 2164–2180. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Willis, C.M.; Griggs, G.B. Reductions in Fluvial Sediment Discharge by Coastal Dams in California and Implications for Beach Sustainability. J. Geol. 2003, 111, 167–182. [Google Scholar] [CrossRef]
- Meissner, T.; Schutt, M.; Sures, B.; Feld, C.K. Riverine regime shifts through reservoir dams reveal options for ecological management. Ecol. App. 2018, 28, 1898–1908. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Y.; Hubbard, S.; Finsterle, S. Factors Governing Sustainable Groundwater Pumping near a River. Ground Water 2010, 49, 432–444. [Google Scholar] [CrossRef]
- Gartner, J.; Renshaw, C.; Dade, W.; Magilligan, F.J. Time and depth scales of fine sediment delivery into gravel stream beds: Constraints from fallout radionuclides on fine sediment residence time and delivery. Geomorphology 2012, 151, 39–49. [Google Scholar] [CrossRef]
- Andrews, E.D.; Pizzi, L.A. Origin of the Colorado River experimental flood in Grand Canyon. Hydrol. Sci. J. 2000, 45, 607–627. [Google Scholar] [CrossRef]
- Jakob, C.; Robinson, C.T.; Uehlinger, U. Longitudinal effects of experimental floods on stream benthos downstream from a large dam. Aquat. Sci. 2003, 65, 223–231. [Google Scholar] [CrossRef] [Green Version]
- Robinson, C.T.; Uehlinger, U.; Monaghan, M.T. Effects of a multi-year experimental flood regime on macroinvertebrates downstream of a reservoir. Aquat. Sci. 2003, 65, 210–222. [Google Scholar] [CrossRef] [Green Version]
- Mannes, S.; Robinson, C.T.; Uehlinger, U.; Scheurer, T.; Ortlepp, J.; Mürle, U.; Molinari, P. Ecological effects of a long-term flood program in a flow-regulated river. Rev. de Géographie Alpine 2008, 96, 125–134. [Google Scholar] [CrossRef] [Green Version]
- Wright, S.A.; Kaplinski, M. Flow structures and sandbar dynamics in a canyon river during a controlled flood, Colorado River, Arizona. J. Geophys. Res. Space Phys. 2011, 116. [Google Scholar] [CrossRef] [Green Version]
- Tonkin, J.D.; Death, R.G. The Combined Effects of flow regulation and an artificial flow release on a regulated river. River Res. Appl. 2014, 30, 329–337. [Google Scholar] [CrossRef]
- Magdaleno, F. Experimental floods: A new era for Spanish and Mediterranean rivers? Environ. Sci. Policy 2017, 75, 10–18. [Google Scholar] [CrossRef]
- Lessard, J.; Hicks, D.M.; Snelder, T.H.; Arscott, D.B.; Larned, S.T.; Booker, D.; Suren, A.M. Dam design can impede adaptive management of environmental flows: A case study from the Opuha Dam, New Zealand. Environ. Man. 2013, 51, 459–473. [Google Scholar] [CrossRef] [PubMed]
- Battisacco, E.; Franca, M.J.; Schleiss, A.J. Sediment replenishment: Influence of the geometrical configuration on the morphological evolution of channel-bed. Water Resour. Res. 2016, 52, 8879–8894. [Google Scholar] [CrossRef]
- Stähly, S.; Franca, M.J.; Robinson, C.T.; Schleiss, A.J. Sediment replenishment combined with an artificial flood improves river habitats downstream of a dam. Sci. Rep. 2019, 9, 1–8. [Google Scholar] [CrossRef]
- Kondolf, G.M.; Wilcock, P.R. The Flushing Flow Problem: Defining and Evaluating Objectives. Water Resour. Res. 1996, 32, 2589–2599. [Google Scholar] [CrossRef]
- Loire, R.; Grosprêtre, L.; Malavoi, J.-R.; Ortiz, O.; Piegay, H. What Discharge Is Required to Remove Silt and Sand Downstream from a Dam? An Adaptive Approach on the Selves River, France. Water 2019, 11, 392. [Google Scholar] [CrossRef] [Green Version]
- Espa, P.; Brignoli, M.L.; Crosa, G.; Gentili, G.; Quadroni, S. Controlled sediment flushing at the Cancano Reservoir (Italian Alps): Management of the operation and downstream environmental impact. J. Environ. Manag. 2016, 182, 1–12. [Google Scholar] [CrossRef]
- Grimardias, D.; Guillard, J.; Cattaneo, F. Drawdown flushing of a hydroelectric reservoir on the Rhô;ne River: Impacts on the fish community and implications for the sediment management. J. Environ. Manag. 2017, 197, 239–249. [Google Scholar] [CrossRef]
- Doretto, A.; Bo, T.; Bona, F.; Apostolo, M.; Bonetto, D.; Fenoglio, S. Effectiveness of artificial floods for benthic community recovery after sediment flushing from a dam. Environ. Monit. Assess. 2019, 191, 88. [Google Scholar] [CrossRef]
- Fonstad, M.A.; Dietrich, J.T.; Courville, B.C.; Jensen, J.L.; Carbonneau, P.E. Topographic structure from motion: A new development in photogrammetric measurement. Earth Surf. Process. Landf. 2013, 38, 421–430. [Google Scholar] [CrossRef] [Green Version]
- Lane, S.N.; Richards, K.; Chandler, J.H. Developments in photogrammetry; the geomorphological potential. Prog. Phys. Geogr. Earth Environ. 1993, 17, 306–328. [Google Scholar] [CrossRef]
- Lane, S.N.; Westaway, R.M.; Hicks, D.M. Estimation of erosion and deposition volumes in a large gravel-bed, braided river using synoptic remote sensing. Earth Surface Process. Landf. 2003, 28, 249–271. [Google Scholar] [CrossRef]
- Snavely, N. Scene Reconstruction and Visualization from Internet Photo Collections. Ph.D. Thesis, University of Washington, Seattle, WA, USA, 2008. [Google Scholar]
- Eltner, A.; Schneider, D. Analysis of Different Methods for 3D Reconstruction of Natural Surfaces from Parallel-Axes UAV Images. Photogramm. Rec. 2015, 30, 279–299. [Google Scholar] [CrossRef]
- James, M.R.; Robson, S. Mitigating systematic error in topographic models derived from UAV and ground-based image networks. Earth Surf. Process. Landf. 2014, 39, 1413–1420. [Google Scholar] [CrossRef] [Green Version]
- Butler, J.; Lane, S.N.; Chandler, J.H.; Porfiri, E. Through-Water Close Range Digital Photogrammetry in Flume and Field Environments. Photogramm. Rec. 2002, 17, 419–439. [Google Scholar] [CrossRef]
- Dietrich, J.T. Bathymetric Structure-from-Motion: Extracting shallow stream bathymetry from multi-view stereo photogrammetry. Earth Surf. Process. Landf. 2017, 42, 355–364. [Google Scholar] [CrossRef]
- Vetsch, D.; Siviglia, A.; Caponi, F.; Ehrbar, D.; Gerke, E.; Kammerer, S.; Koch, A.; Peter, S.; Vanzo, D.; Vonwiller, L.; et al. System Manuals of BASEMENT, Version 2.8. Laboratory of Hydraulics, Glaciology and Hydrology (VAW). ETH Zurich, 2018. Available online: http://www.basement.ethz.ch (accessed on 25 August 2020).
- Tachet, H.; Bournaud, M.; Richoux, P.; Usseglio-Polatera, P. Invertébrés d’eau Douce—Systématique, Biologie, Écologie; CNRS Editions: Paris, France, 2010; 600p. [Google Scholar]
- Wolman, M.G. A method of sampling coarse river-bed material. Trans. Am. Geophys. Union 1954, 35, 951–956. [Google Scholar] [CrossRef]
- Shields, A. Application of Similarity Principles and Turbulence Research to Bed-Load Movement. Mitteilungen der Preußischen Versuchsanstalt für Wasserbau, 26; Preußische Versuchsanstalt für Wasserbau: Berlin, Germany, 1936. [Google Scholar]
- Weingartner, R.; Aschwanden, H. Quantification des débits des cours d’eau des Alpes suisses et des influences anthropiques qui les affectent. Rev. de Géographie Alpine 1994, 82, 45–57. [Google Scholar] [CrossRef]
- OFEFP. Débits Résiduels Convenables—Comment les Déterminer? Office Fédérale de l’environnement, des Forêts et du Paysage (OFEFP): Bern, Switzerland, 2000. [Google Scholar]
- James, M.R.; Antoniazza, G.; Robson, S.; Lane, S.N. Mitigating systematic error in topographic models for geomorphic change detection: Moving beyond off-nadir imagery. Earth Surface Process. Landf. 2020, 45, 2251–2271. [Google Scholar] [CrossRef]
- James, M.; Robson, S.C. Straightforward reconstruction of 3D surfaces and topography with a camera: Accuracy and geoscience application. J. Geophys. Res. Space Phys. 2012, 117, 03017. [Google Scholar] [CrossRef] [Green Version]
- Smith, M.; Carrivick, J.; Quincey, D. Structure from motion photogrammetry in physical geography. Prog. Phys. Geogr. Earth Environ. 2016, 40, 247–275. [Google Scholar] [CrossRef]
- James, M.R.; Chandler, J.H.; Eltner, A.; Fraser, C.; Miller, P.E.; Mills, J.P.; Noble, T.; Robson, S.; Lane, S.N. Earth Surface Processes and Landforms Guidelines on the use of Structure from Motion Photogrammetry in Geomorphic Research. Earth Surface Process. Landf. 2019, 44, 2081–2084. [Google Scholar] [CrossRef]
- Griffiths, D.; Burningham, H. Comparison of pre- and self-calibrated camera calibration models for UAS-derived nadir imagery for a SfM application. Progr. Phys. Geogr. 2019, 43, 215–235. [Google Scholar] [CrossRef] [Green Version]
- Lane, S.N.; Richards, K.S. Two-dimensional modelling of flow processes in a multi-thread channel. Hydrolog. Process. 1998, 12, 1279–1298. [Google Scholar] [CrossRef]
- Yu, D.; Lane, S. Urban fluvial flood modeling using a two-dimensional diffusion wave treatment. River Flow 2004 2004, 20, 1085–1092. [Google Scholar] [CrossRef]
- Bakker, M.; Antoniazza, G.; Odermatt, E.; Lane, S.N. Morphological Response of an Alpine Braided Reach to Sediment-Laden Flow Events. J. Geophys. Res. Earth Surf. 2019, 124, 1310–1328. [Google Scholar] [CrossRef] [Green Version]
- Schälchli, U. The clogging of coarse gravel river beds by fine sediment. Hydrobiologia 1992, 235-236, 189–197. [Google Scholar] [CrossRef]
- Gordon, N.D.; McMahon, T.A.; Finlayson, B.L.; Gippel, C.J.; Nathan, R.J. Stream Hydrology: An Introduction for Ecologists; Wiley: Chichester, UK, 2005; 429p. [Google Scholar]
- Bunte, K.; Abt, S.R.; Swingle, K.W.; Cenderelli, D.A.; Schneider, J.M. Critical Shields values in coarse-bedded steep streams. Water Resour. Res. 2013, 49, 7427–7447. [Google Scholar] [CrossRef] [Green Version]
- Jorde, K.; Schneider, M.; Zoellner, F. Analysis of Instream Habitat Quality–Preference Functions and Fuzzy Models. In Stochastic Hydraulics; Wang, H., Ed.; Balkema: Rotterdam, The Netherland, 2000; pp. 671–680. [Google Scholar]
- Adriaenssens, V.; Goethals, P.L.; De Pauw, N. Fuzzy knowledge-based models for prediction of Asellus and Gammarus in watercourses in Flanders (Belgium). Ecol. Model. 2006, 195, 3–10. [Google Scholar] [CrossRef]
- Van Broekhoven, E.; Adriaenssens, V.; De Baets, B. Interpretability-preserving genetic optimization of linguistic terms in fuzzy models for fuzzy ordered classification: An ecological case study. Int. J. Approx. Reason. 2007, 44, 65–90. [Google Scholar] [CrossRef] [Green Version]
- Van Broekhoven, E.; Adriaenssens, V.; De Baets, B.; Verdonschot, P.F. Fuzzy rule-based macroinvertebrate habitat suitability models for running waters. Ecol. Model. 2006, 198, 71–84. [Google Scholar] [CrossRef]
- Tonina, D.; Jorde, K. Hydraulic Modelling Approaches for Ecohydraulic Studies: 3D, 2D, 1D and Non-Numerical Models. In Ecohydraulics: An Integrated Approach; Maddock, I., Harby, A., Kemp, P., Wood, P., Eds.; Wiley: Hoboken, NJ, USA, 2013; pp. 31–74. [Google Scholar] [CrossRef]
- Mouton, A.M.; Jowett, I.; Goethals, P.L.; De Baets, B. Prevalence-adjusted optimisation of fuzzy habitat suitability models for aquatic invertebrate and fish species in New Zealand. Ecol. Inform. 2009, 4, 215–225. [Google Scholar] [CrossRef]
- Schneider, M.; Kopecki, I.; Tuhtan, J.; Sauterleute, J.F.; Zinke, P.; Bakken, T.H.; Merigoux, S. A fuzzy rule-based model for the assessment of macrobenthic habitats under hydropeaking impact: Fuzzy rule-based model for benthic habitats. River Res. Appl. 2017, 33, 377–387. [Google Scholar] [CrossRef]
- Theodoropoulos, C.; Skoulikidis, N.; Rutschmann, P.; Stamou, A. Ecosystem-based environmental flow assessment in a Greek regulated river with the use of 2D hydrodynamic habitat modelling. River Res. Appl. 2018, 34, 538–547. [Google Scholar] [CrossRef]
- Korte, T. Current and substrate preferences of benthic invertebrates in the rivers of the Hindu Kush-Himalayan region as indicators of hydromorphological degradation. Hydrobiologia 2010, 651, 77–91. [Google Scholar] [CrossRef]
- Schröder, M.; Kiesel, J.; Schattmann, A.; Jähnig, S.C.; Lorenz, A.; Kramm, S.; Keizer-Vlek, H.; Rolauffs, P.; Graf, W.; Leitner, P.; et al. Substratum associations of benthic invertebrates in lowland and mountain streams. Ecol. Indic. 2013, 30, 178–189. [Google Scholar] [CrossRef]
- Allan, J.D. Macroinvertebrate drift in a Rocky Mountain stream. Hydrobiologia 1987, 144, 261–268. [Google Scholar] [CrossRef]
- Holomuzki, J.R.; Biggs, B.J.F. Taxon-specific responses to high-flow disturbance in streams:implications for population persistence. J. N. Am. Benthol. Soc. 2000, 19, 670–679. [Google Scholar] [CrossRef]
- Weigelhofer, G.; Waringer-Löschenkohl, A. Vertical Distribution of Benthic Macroinvertebrates in Riffles versus Deep Runs with Differing Contents of Fine Sediments (Weidlingbach, Austria). Int. Rev. Hydrobiol. 2003, 88, 304–313. [Google Scholar] [CrossRef]
- Rice, S.P.; Greenwood, M.T.; Joyce, C.B. Macroinvertebrate community changes at coarse sediment recruitment points along two gravel bed rivers. Water Resour. Res. 2001, 37, 2793–2803. [Google Scholar] [CrossRef]
- Loskotová, B.; Straka, M.; Pail, P.; Pařil, P. Sediment characteristics influence benthic macroinvertebrate vertical migrations and survival under experimental water loss conditions. Fundamental Appl. Limnol. Archiv. für Hydrobiol. 2019, 193, 39–49. [Google Scholar] [CrossRef]
- Pedrycz, W. Adaptive fuzzy systems and control. Control. Eng. Pr. 1994, 2, 1091–1092. [Google Scholar] [CrossRef]
- Lamouroux, N.; Jowett, I.G. Generalized Instream Habitat Models. Can. J. Fish. Aquat. Sci. 2005, 62, 7–14. [Google Scholar] [CrossRef]
- Lane, S.N.; Mould, D.C.; Carbonneau, R.E.; Hardy, R.J.; Bergeron, N. Fuzzy Modelling of Habitat Suitability Using 2D and 3D Hydrodynamic Models: Biological Challenges; Taylor and Francis Ltd.: London, UK, 2006. [Google Scholar]
- Ahmadi-Nedushan, B.; St-Hilaire, A.; Berube, M.; Ouarda, T.B.M.J.; Robichaud, É. Instream flow determination using a multiple input fuzzy-based rule system: A case study. River Res. Appl. 2008, 24, 279–292. [Google Scholar] [CrossRef]
- Quadroni, S.; Brignoli, M.L.; Crosa, G.; Gentili, G.; Salmaso, F.; Zaccara, S.; Espa, P. Effects of sediment flushing from a small Alpine reservoir on downstream aquatic fauna. Ecohydrology 2016, 9, 1276–1288. [Google Scholar] [CrossRef]
- Espa, P.; Batalla, R.J.; Brignoli, M.L.; Crosa, G.; Gentili, G.; Quadroni, S. Tackling reservoir siltation by controlled sediment flushing: Impact on downstream fauna and related management issues. PLoS ONE 2019, 14, e0218822. [Google Scholar] [CrossRef]
- Heidel, S.G. The progressive lag of sediment concentration with flood waves. Trans. Am. Geophys. Union 1956, 37, 56. [Google Scholar] [CrossRef]
- Antoine, G.; Camenen, B.; Jodeau, M.; Némery, J.; Esteves, M. Downstream erosion and deposition dynamics of fine suspended sediments due to dam flushing. J. Hydrol. 2020, 585, 124763. [Google Scholar] [CrossRef]
- Jackson, W.L.; Beschta, R.L. A model of two-phase bedload transport in an oregon coast range stream. Earth Surf. Process. Landf. 1982, 7, 517–527. [Google Scholar] [CrossRef]
- Wu, F.-C. Modeling embryo survival affected by sediment deposition into salmonid spawning gravels: Application to flushing flow prescriptions. Water Resour. Res. 2000, 36, 1595–1603. [Google Scholar] [CrossRef] [Green Version]
- Doeg, T.J.; Milledge, G.A. The effects of experimentally increasing suspended sediment concentrations on macroinvertebrate drift. Aust. J. Mar. Freshw. Res. 1991, 42, 519–526. [Google Scholar] [CrossRef]
- Gomi, T.; Kobayashi, S.; Negishi, J.N.; Imaizumi, F. Short-term responses of macroinvertebrate drift following experimental sediment flushing in a Japanese headwater channel. Landsc. Ecol. Eng. 2010, 6, 257–270. [Google Scholar] [CrossRef]
- Nicholas, A.P.; Smith, G.H.S.; Amsler, M.L.; Ashworth, P.J.; Best, J.L.; Hardy, R.J.; Lane, S.N.; Orfeo, O.; Parsons, D.R.; Reesink, A.J.H.; et al. The role of discharge variability in determining alluvial stratigraphy. Geology 2015, 44, 3–6. [Google Scholar] [CrossRef] [Green Version]
- Lane, S.N. Approaching the system-scale understanding of braided river behaviour. In Braided Rivers: Process, Deposits, Ecology and Management; Sambrook Smith, G.H., Best, J.L., Bristow, C.S., Petts, G.E., Eds.; IAS Special Publication; Blackwell Publishing: Oxford, UK, 2006. [Google Scholar]
- Chandler, J.H.; Cooper, M.; Robson, S. Analytical Aspects of Small Format Surveys Using Oblique Aerial Photographs. J. Photogr. Sci. 1989, 37, 235–240. [Google Scholar] [CrossRef]
- Robson, S. Film deformation in non-metric cameras under weak geometric conditions—An uncorrected disaster? Int. Arch. Photogramm. Remote Sens. 1992, 29, 561–567. [Google Scholar]
- Carbonneau, P.E.; Dietrich, J.T. Cost-effective non-metric photogrammetry from consumer-grade sUAS: Implications for direct georeferencing of structure from motion photogrammetry. Earth Surf. Process. Landforms 2016, 42, 473–486. [Google Scholar] [CrossRef] [Green Version]
- Kromer, R.A.; Walton, G.; Gray, B.; Lato, M.J. Robert Group Development and Optimization of an Automated Fixed-Location Time Lapse Photogrammetric Rock Slope Monitoring System. Remote Sens. 2019, 11, 1890. [Google Scholar] [CrossRef] [Green Version]
- Meinen, B.U.; Robinson, D.T. Mapping erosion and deposition in an agricultural landscape: Optimization of UAV image acquisition schemes for SfM-MVS. Remote Sens. Environ. 2020, 239, 111666. [Google Scholar] [CrossRef]
- Zimmerman, T.; Jansen, K.; Miller, J. Analysis of UAS Flight Altitude and Ground Control Point Parameters on DEM Accuracy along a Complex, Developed Coastline. Remote Sens. 2020, 12, 2305. [Google Scholar] [CrossRef]
- Capolupo, A.; Saponaro, M.; Mondino, E.B.; Tarantino, E. Combining Interior Orientation Variables to Predict the Accuracy of Rpas–Sfm 3D Models. Remote Sens. 2020, 12, 2674. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Inundation | Slope | Correlation | |||||||
|---|---|---|---|---|---|---|---|---|---|
| n/Q (m3·s−1) | 0.20 | 0.25 | 0.30 | 0.20 | 0.25 | 0.30 | 0.20 | 0.25 | 0.30 |
| 0.045 | OK | 0.876 | 0.870 | ||||||
| 0.050 | X | OK | 0.943 | 0.870 | 0.862 | 0.871 | |||
| 0.055 | X | OK | 0.937 | 0.897 | 0.863 | 0.869 | |||
| 0.060 | OK | 0.891 | 0.870 | ||||||
| 0.070 | OK | 0.878 | 0.871 |
| Poor Min (1) | Poor Max (1) | Poor Min (2) | Poor Max (2) | Med Min (1) | Med Max (1) | Med Min (2) | Med Max (2) | Good Min | Good Max | |
|---|---|---|---|---|---|---|---|---|---|---|
| Shear Stress, Nm−2 | ||||||||||
| Limneph. | 0 | 0.010 | 1.09 | ∞ | 0.010 | 0.07 | 0.529 | 1.09 | 0.07 | 0.529 |
| Baetidae | 0 | 0.118 | 11.27 | ∞ | 0.118 | 0.393 | 6.34 | 11.27 | 0.393 | 6.34 |
| Chironim. | 0 | 0.077 | 4.48 | ∞ | 0.077 | 0.083 | 0.118 | 4.48 | 0.083 | 0.118 |
| Perlodidae | 0 | 0.083 | 6.34 | ∞ | 0.083 | 0.118 | 1.59 | 6.34 | 0.118 | 1.59 |
| D50, m | ||||||||||
| Limneph. | 0 | 0.001 | 0.2 | ∞ | 0.001 | 0.01 | 0.1 | 0.2 | 0.01 | 0.1 |
| Baetidae | 0 | 0.002 | 0.5 | ∞ | 0.002 | 0.02 | 0.2 | 0.5 | 0.02 | 0.2 |
| Chironim. | 0 | 0.0005 | 0.2 | ∞ | 0.0005 | 0.01 | 0.1 | 0.2 | 0.01 | 0.1 |
| Perlodidae | 0 | 0.01 | 0.5 | ∞ | 0.01 | 0.02 | 0.2 | 0.5 | 0.02 | 0.2 |
| Sand | Gravel | Cobbles and Coarser | Total by Family | |
|---|---|---|---|---|
| Before the MFF | ||||
| Chironimidae | 16 | 13 | 8 | 37 |
| Limnephilidae | 6 | 28 | 25 | 59 |
| Baetidae | 19 | 58 | 249 | 326 |
| Perlodidae | 6 | 31 | 60 | 97 |
| Total by substrate | 47 | 130 | 342 | |
| After the MFF | ||||
| Chironimidae | 1 | 1 | 3 | 5 |
| Limnephilidae | 3 | 6 | 71 | 80 |
| Baetidae | 0 | 35 | 159 | 194 |
| Perlodidae | 0 | 13 | 72 | 85 |
| Total by substrate | 4 | 55 | 305 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lane, S.N.; Gentile, A.; Goldenschue, L. Combining UAV-Based SfM-MVS Photogrammetry with Conventional Monitoring to Set Environmental Flows: Modifying Dam Flushing Flows to Improve Alpine Stream Habitat. Remote Sens. 2020, 12, 3868. https://doi.org/10.3390/rs12233868
Lane SN, Gentile A, Goldenschue L. Combining UAV-Based SfM-MVS Photogrammetry with Conventional Monitoring to Set Environmental Flows: Modifying Dam Flushing Flows to Improve Alpine Stream Habitat. Remote Sensing. 2020; 12(23):3868. https://doi.org/10.3390/rs12233868
Chicago/Turabian StyleLane, Stuart N., Alice Gentile, and Lucien Goldenschue. 2020. "Combining UAV-Based SfM-MVS Photogrammetry with Conventional Monitoring to Set Environmental Flows: Modifying Dam Flushing Flows to Improve Alpine Stream Habitat" Remote Sensing 12, no. 23: 3868. https://doi.org/10.3390/rs12233868