1. Introduction
Remotely sensed data collected by modern Earth Observation systems, such as the European Sentinel programme [
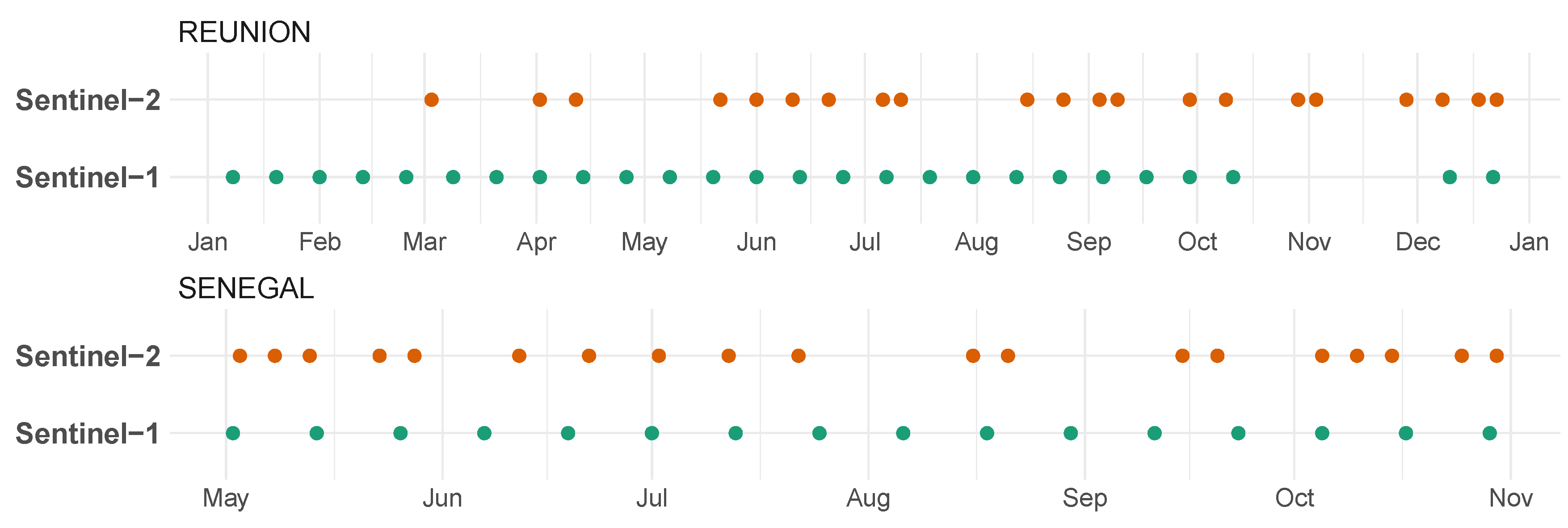
1], are getting increasing attention in recent years to cope with Earth surface monitoring. In particular, the Sentinel-1 and Sentinel-2 missions are of interest, since they provide publicly available multi-temporal radar and optical images respectively, with high spatial resolution (up to 10 m) and high revisit time (up to five days). Thanks to these unprecedented spatial and temporal resolutions, data coming from such sensors can be arranged in Satellite Image Time Series (SITS). SITS have been employed to deal with several tasks in multiple domains ranging from ecology [
2], agriculture [
3], land management planning [
4], and forest and natural habitat monitoring [
5,
6].
Among these fields, Land Use/Land cover (LULC) mapping has received large attention in the last years [
7,
8,
9,
10], since it provides essential components on which further indicators can be built on [
11]. As example, an accurate mapping of croplands and crop types is the cornerstone of agricultural monitoring systems, as it allows providing information on food production for developing countries or global market. However, cropland mapping has been identified as an important gap in agricultural monitoring systems [
12].
As regards LULC mapping, both radar and optical sources have been employed, often solely, disregarding the well-known complementary existing between them, as recently underlined [
13,
14,
15,
16]. Additionally, when both sources of information are jointly used, they are independently processed without really leveraging the interplay between them, i.e., through a simple concatenation with machine learning algorithms [
7,
17,
18] or an integration via a data fusion techniques [
19,
20]. In addition, such techniques ignore the spatial and temporal dependencies carried out by SITS.
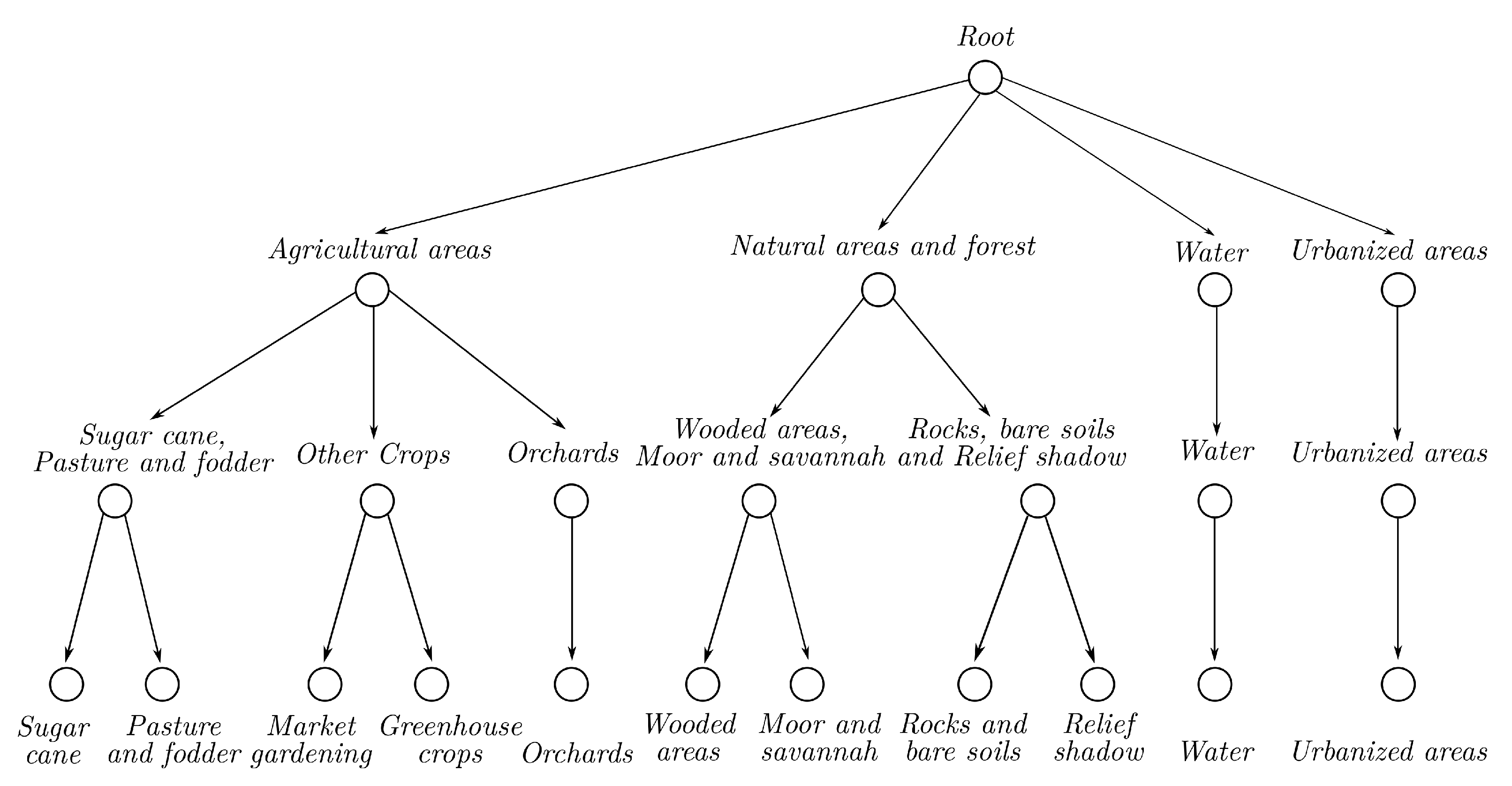
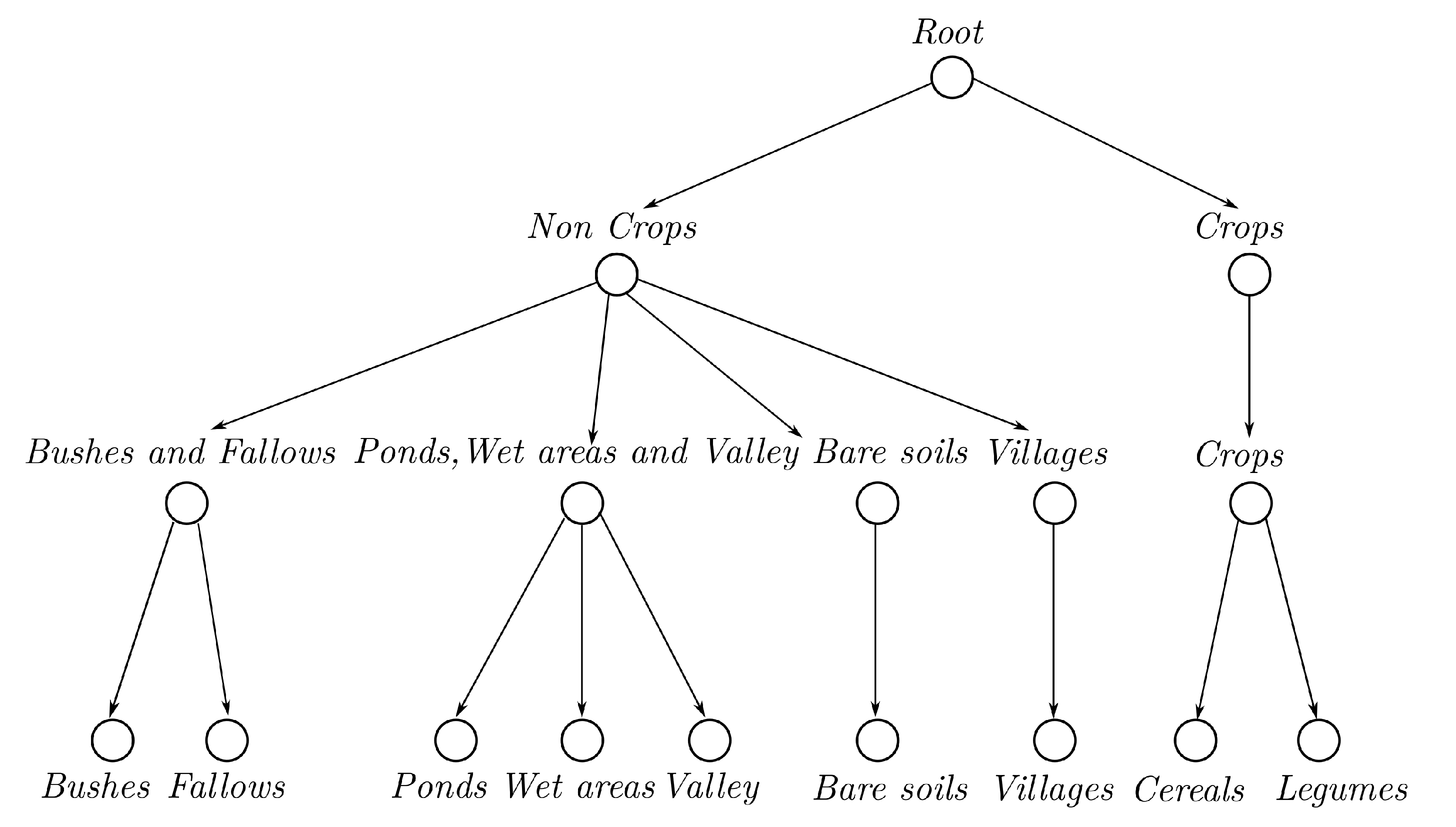
Furthermore, concerning LULC mapping domain, specific knowledge about LULC classes can be available. LULC classes can be organized hierarchically via class/subclass relationships. For instance, agricultural land cover can be organized in crop types and subsequently crop types in specific crops. A notable example of such hierarchical organization is the Food and Agriculture Organization (FAO)–Land Cover Classification System (LCCS) [
21]. Because of the presence of such class/subclass relationships, most of the time, we can derive a hierarchical or taxonomic organization of LULC classes that could be appealing to consider in subsequent land cover mapping process. Only few studies, today, have considered the use of such hierarchical information to deal with land cover mapping [
22,
23,
24]. Generally, such frameworks build an independent classification model for each level of the hierarchy and the decision made at a certain level of the taxonomy cannot be modified, further, in the decision process.
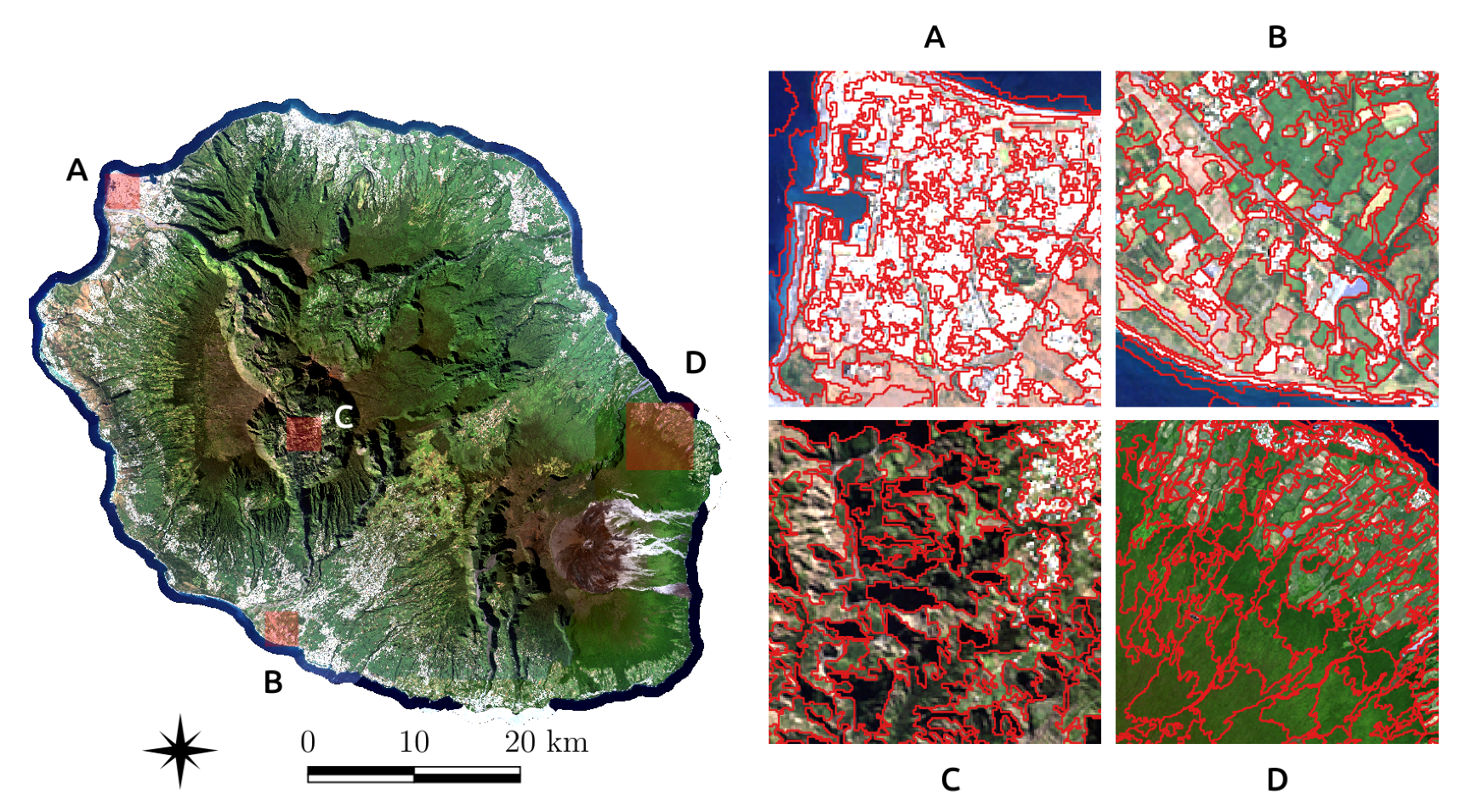
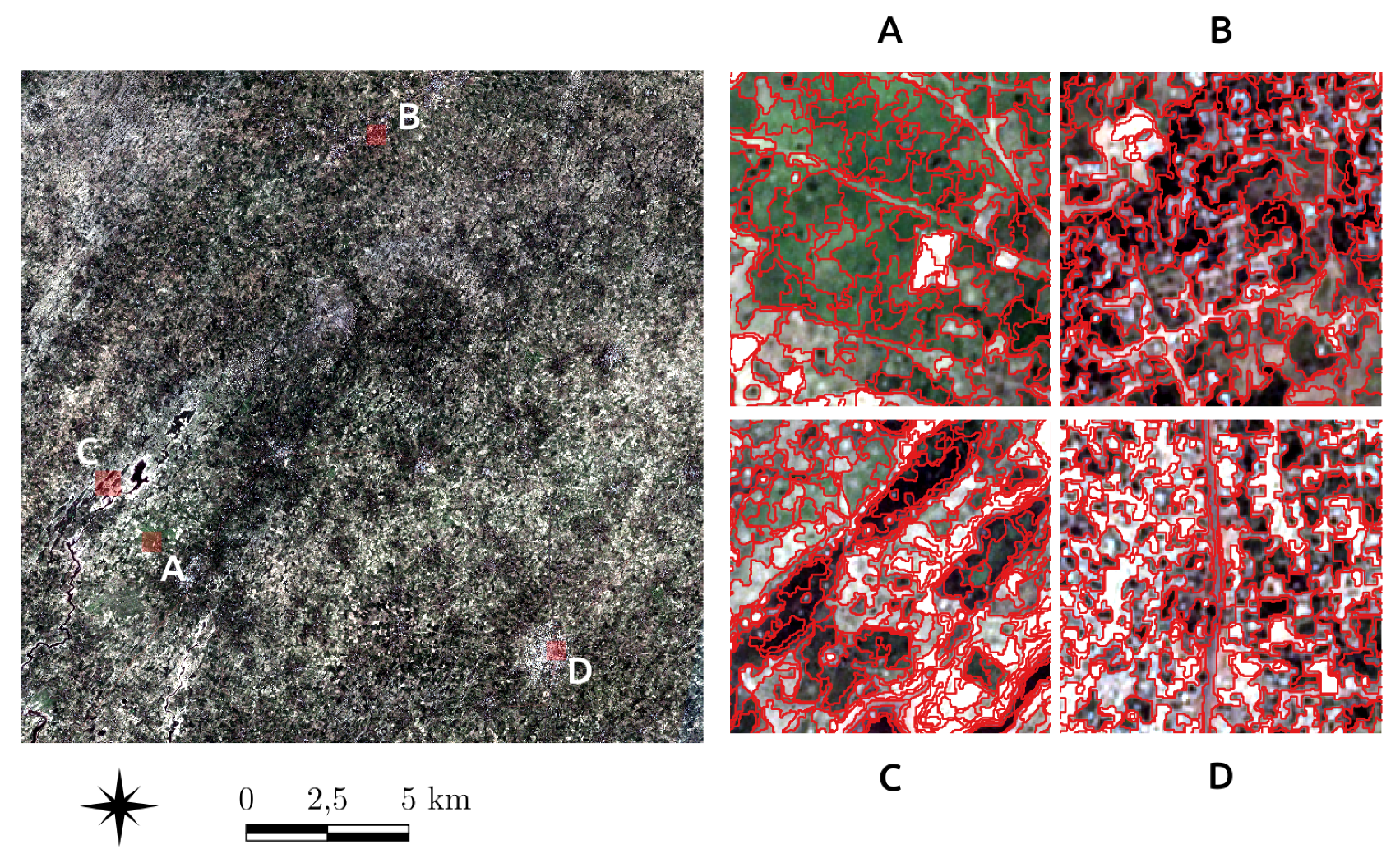
Another challenge to deal with when carrying out land cover mapping is related to the spatial granularity at which the remote sensing time series data are analysed: pixel or object [
25]. While in the pixel based analysis, the basic units are the pixels, in object-based image analysis (OBIA), the images are first segmented obtaining groups of radiometrically homogeneous pixels: the objects, which become the basic units in any further analysis. Considering objects instead of pixels has the main advantage to work with more coherent piece of information that are simpler to interpret [
26] for an end user or field expert.
Nowadays, Deep Learning (DL) is pervasive in many domains including remote sensing [
27,
28,
29,
30]. When considering the use of multi-source (radar and optical) data in the context of LULC mapping, authors in [
3] employed a Convolutional Neural Network (CNN) based architecture to combine Sentinel-1 and Landsat-8 images for land cover and crop types mapping. This CNN architecture processed the data with convolutions in both spatial and spectral domains while the temporal domain was not taken into account. Authors in [
14] proposed the TWINNS architecture, a combination of CNN and Convolutional Recurrent Neural Network [
31] (ConvRNN) aiming to leverage both spatial and temporal dependencies in the SITS data as well as the complementarity of radar and optical sensors. Such approaches work at pixel level and do not exploit additional background information (i.e., class/subclass relationships) during their learning process. Furthermore they are not directly transferable to object-level analysis as it is. Recently, authors in [
15] proposes a preliminary investigation of Recurrent Neural Network (RNN) approaches introducing the OD2RNN model for multi-source land cover mapping. Recurrent Neural Networks are exploited to deal with SITS in an OBIA framework instead of ConvRNN, since the latter cannot be applied to the agglomerate statistics describing the object-level SITS.
We introduce in this work the DL-based HOb2sRNN (Hierarchical Object based two-Stream Recurrent Neural Network) architecture in order to deal with land cover mapping at object level using multi-source (radar and optical) SITS data and exploiting hierarchical relationships among land cover classes. Our framework is tailored for a common OBIA setting, where a prior segmentation is typically performed to provide a suitable object layer, and the so-obtained segments are attributed using agglomerate statistics starting from the available image set, to be subsequently used as samples for training and classification. HOb2sRNN is therefore conceived to perform object-based LULC mapping given the radar and optical object SITS available on the study area, the relative ground truth data and the associated land cover class hierarchy. Building upon the preliminary work presented in [
15], as a major further contribution, here, we propose an architecture that is based on an extended RNN model enriched via a modified attention mechanism capable of fitting the specificity of SITS data. In addition, we also introduce a pretraining strategy to get the most out of the information available under the shape of hierarchical relationships between land cover classes. Last but not least important, differently from previous works on multi-source and multi-temporal land cover mapping that exploits DL methods [
14,
15], we also provide, in this study, a contribution related to the interpretability of the proposed model. More specifically, we investigate and discuss how the side information provided by HOb2sRNN can be leveraged to draw some connections between the way in which the model takes its decision and the agronomic knowledge we have.
With the aim to provide an in-depth assessment of the HOb2sRNN behaviour, an extensive experimental evaluation is conducted on two study sites with diverse land cover characteristics, namely the Reunion island and a part of the Senegalese groundnut basin, the latter being dominated by small scale agriculture and limited in the amount of available data. The results have underlined the effectiveness of our proposal when compared to competitive and recent approaches commonly leveraged to deal with land cover mapping task, including the work presented in [
15].
The remainder of this work is structured, as follows: first, the study sites and associated data are introduced in
Section 2; and then
Section 3 describes the proposed method while the experimental settings and the evaluations are carried out and discussed in
Section 4 and
Section 5, respectively, and finally,
Section 6 draws the conclusion.
3. Method
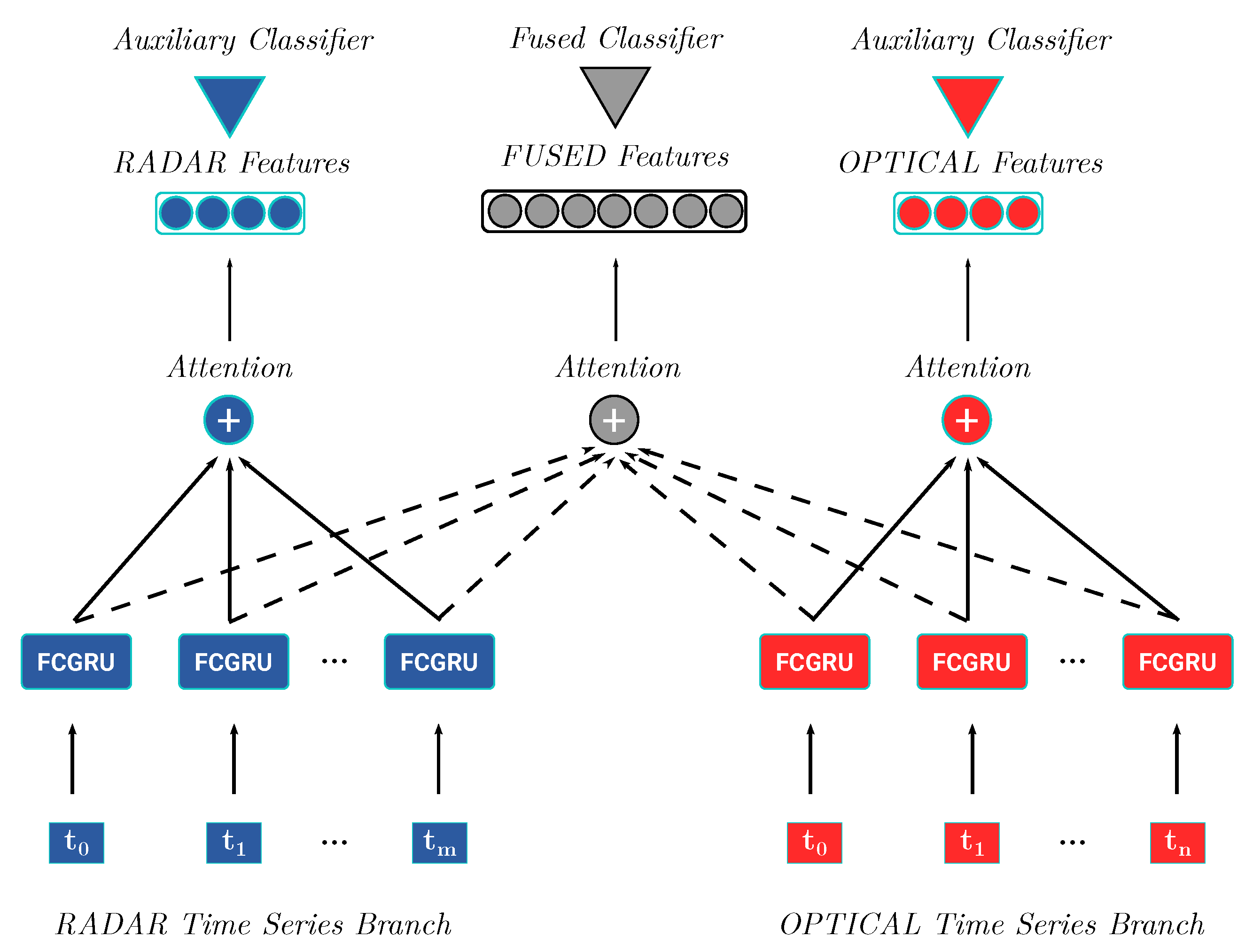
Figure 6 depicts the proposed deep learning architecture, named HOb2sRNN, for the multi-source SITS classification process. The architecture involves two branches: one for the radar SITS (left) and one for the optical SITS (right). At the end of the per-source analysis, the results of the two branches are merged and a final decision is made. The model automatically combines the multi-source and multi-temporal information in an end-to-end process. The output of the model is a land cover classification for each pair of time series (radar and optical). Each branch of the HOb2sRNN architecture can be decomposed in two parts: (i) the time series analysis through the extended Gated Recurrent Unit cell, we named FCGRU and (ii) the multi-temporal combination to generate per-source features employing a modified attention mechanism. Moreover, the per branch FCGRU outputs are concatenated and the attention mechanism is employed again to extract fused features. Finally, the extracted per branch and fused features are leveraged to produce the final land cover classification. Such learned features, named
,
, and
, indicate, respectively, the output of the radar branch, the optical branch, and the source fusion. In addition, the architecture is trained leveraging domain knowledge represented under the shape of hierarchy that organizes land cover classes in a taxonomy with class/subclass relationships. The hierarchical information is exploited to pretrain the HOb2sRNN architecture considering tasks of increasing complexity.
Section 3.4 details the process.
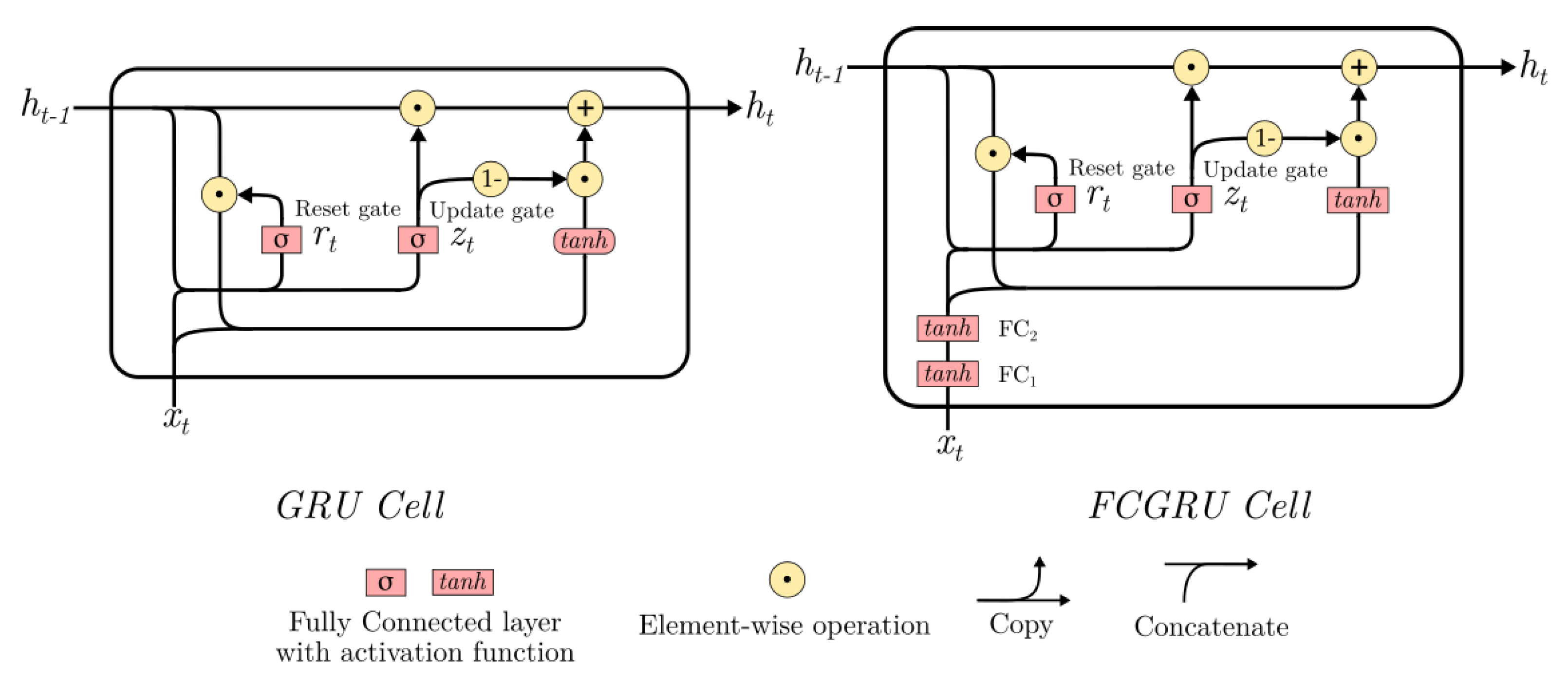
3.1. Fully Connected Gated Recurrent Unit (FCGRU)
The first part of each branch is constituted by an enriched Gated Recurrent Unit that extends standard GRU [
35]. We name such enriched GRU as Fully Connected GRU (FCGRU). In
Figure 7 we illustrate the standard GRU unit and the introduced FCGRU. The FCGRU cell extends the GRU unit by involving two fully connected layers namely
and
at the beginning of the cell pipeline. Such layers preprocess the input time series information before starting the standard GRU unit transformation. Therefore, they allow for the architecture to extract an useful input combination for the classification task, enriching the original representation of the object time series. More specifically,
takes as input the object time series (radar or optical) and its output is used to feed
. A Hyperbolic Tangent (
) non-linearity is associated to each of the fully connected layers for the sake of consistency with the GRU unit that is mainly based on Sigmoid and
functions. The
activation function has an S-shape and is delimited in the range [
]. Successively, the standard GRU unit transformation is employed over the enriched representation (output of
). It is composed of a hidden state
, the reset gate
, and the update gate
. The gates regulate the information to be forgotten or remembered during the learning process and deal with the vanishing and exploding gradient problem. The output of the unit is the new hidden state
. Dropout was employed in the FCGRU cell on the ongoing states and between the two fully connected layers to prevent overfitting. The following equations formally describe the extended GRU cell:
The ⊙ symbol indicates an element-wise multiplication while and tanh represent Sigmoid and Hyperbolic Tangent function, respectively. is the time stamp input vector and is the enriched input vector representation. The different weight matrices , , and bias vectors are the parameters learned during the training of the model.
3.2. Modified Attention Mechanism
The second part of the branches consists of a modified neural attention mechanism on top of the output hidden states produced by the FCGRU cell. Attention strategies [
36,
37,
38] are widely used in one-dimensional (1D) signal or natural language processing to combine RNN outputs at different time stamps through a set of attention weights. In the traditional attention mechanism, the set of weights is computed using a
function so that their values ranges in [
] and their sum is equal to 1 providing at the same time a probabilistic interpretation. Due to the sum constraint, the
attention has the property to prioritize one instance over the others making it well suited for tasks such as machine translation where each target word is aligned to one of the source word [
39]. However, in the remote sensing time series classification context, forcing the sum of weights to 1 may not be fully beneficial for the attention model. In fact, considering a specific time series classification task where almost all of the time stamps are relevant for the problem, the use of a SoftMax function to compute attention weights will squash towards zero the attention weights since their sum should be one and finally the attention combination may not be efficient as expected. Therefore, relaxing this constraint could help the model to better weight the relevant time stamps independently. In our attention formulation, we attempted to address this point by substituting the
function with a Hyperbolic Tangent to compute attention weights. The motivation behind the
attention, in addition to the sum constraint relaxation, is that the learned attention weights will be in a wider range i.e., [
], also allowing negative values. The equations below describe the
attention formulation that we introduced:
where
is a matrix obtained by vertically stacking all hidden state vectors
learned at the
N different time stamps by the FCGRU;
is the attention weight vector traditionally computed by a
function that we replaced by a
function; matrix
and vectors
are parameters learned during the process.
The described attention mechanism is employed over the FCGRU outputs (hidden states) in the radar and optical branches to generate per-source features ( and ). Such features encode the temporal information related to the input sources. Furthermore, the per-source hidden states are concatenated and an additional attention mechanism is employed over them to generate fused features (). Such features encode both temporal information and complementarity of radar and optical SITS. Thus, the architecture involves learning three sets of attention weights: , and , which refers, respectively, to the attention mechanisms employed over the radar, optical and concatenated hidden states.
3.3. Feature Combination
Once each set of features has been yielded, they are directly leveraged to perform the final land cover classification. The combination process involves three classifiers: one main classifier on top of the fused features and two auxiliary classifiers, one for each source features. The main classifier is composed of two fully connected layers and a
layer. The fully connected layers are associated to a ReLU non linearity and followed by a dropout layer each. The auxiliary classifiers are composed of one
layer each. Auxiliary classifiers [
10,
14,
40] are used to strengthen the complementarity as well as the discriminative power of the per-source learned features. Their goal is to stress the fact that the learned features need to be discriminative alone i.e., independently from each other [
10,
14,
41]. Subsequently, the cost function associated to the optimization of the three classifiers is:
where
is the loss computed by the categorical Cross-Entropy function and associated to the classifier fed with the features
. The contribution of the auxiliary classifiers is weighted by the parameter
. The final land cover class is obtained by combining the three classifier outcomes with the same weighting schema employed in the loss computation:
where
and
are respectively the prediction scores of the fused classifier and the auxiliary classifier associated to one of the radar or optical branch. We empirically set the value of
to 0.5 with the aim to enforce the discriminative power of the per-source learned features while privileging the fused features in the combination.
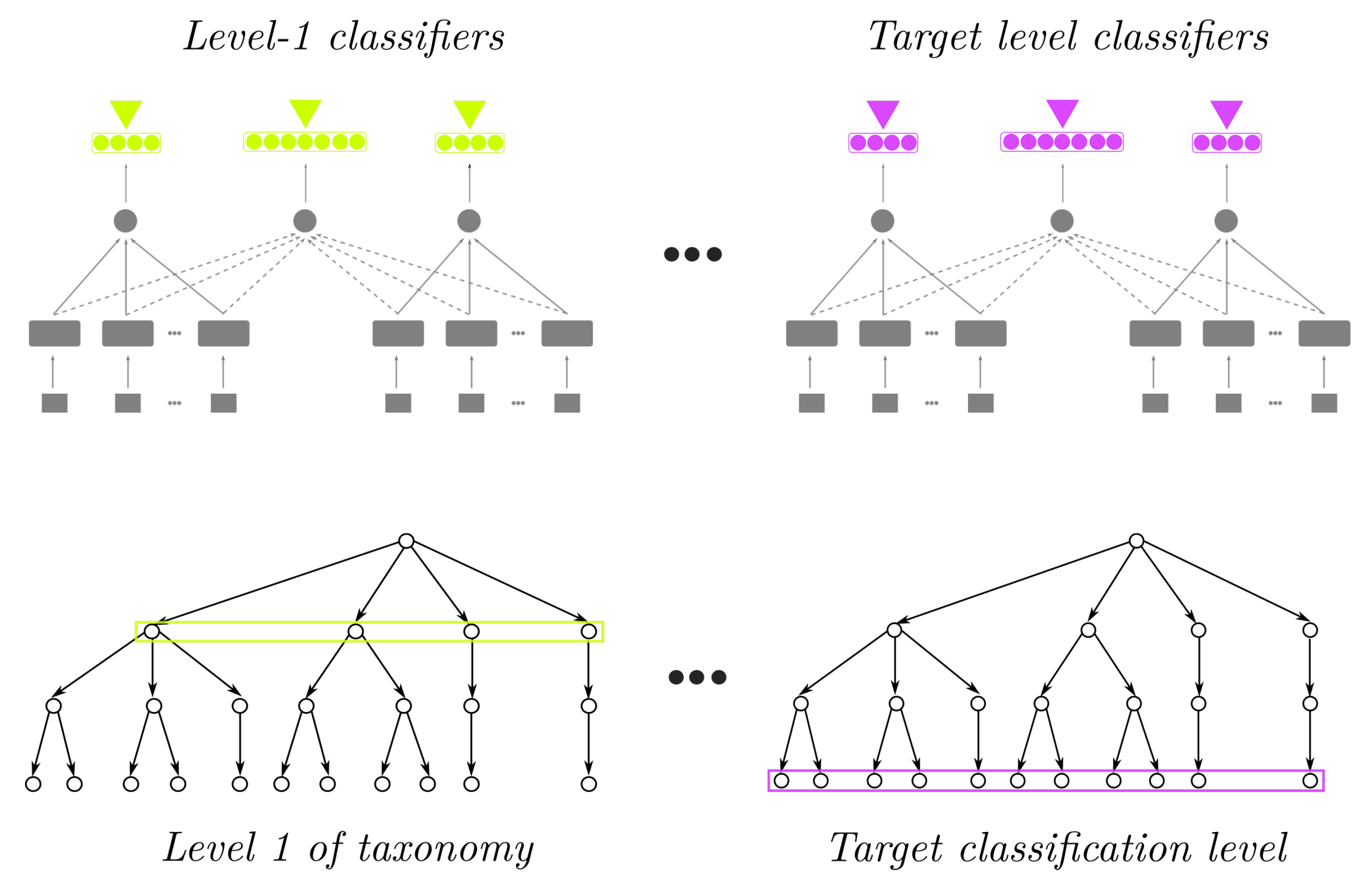
3.4. Hierarchical Pretraining Strategy
With the aim to leverage specific domain knowledge about the LULC classes, the HOb2sRNN parameters were learned exploiting the taxonomic organization associated to the classes. The training of the model is repeated for each level of the taxonomy, from the more general to the most specific (the target classification level). Specifically, we start training the model from the highest level of the hierarchy and then, continue training at the next level by reusing the previously learned weights for the whole architecture, excepting those that are associated to the classifiers, since level specific (see
Figure 8). New weights were learned for the classifiers at each level of the taxonomy. The process is performed until we reach the target classification level. In summary, the hierarchical pretraining strategy allows for the model to focus first on high level classification problems (i.e., crops vs non crops) and, step by step, to smoothly adapt its behaviour to deal with classification problems of increasing complexity. In addition, this process allows the model to tackle the classification at the target level integrating a kind of prior knowledge on the task (based on high level classes) instead of addressing it completely from scratch.
5. Discussion
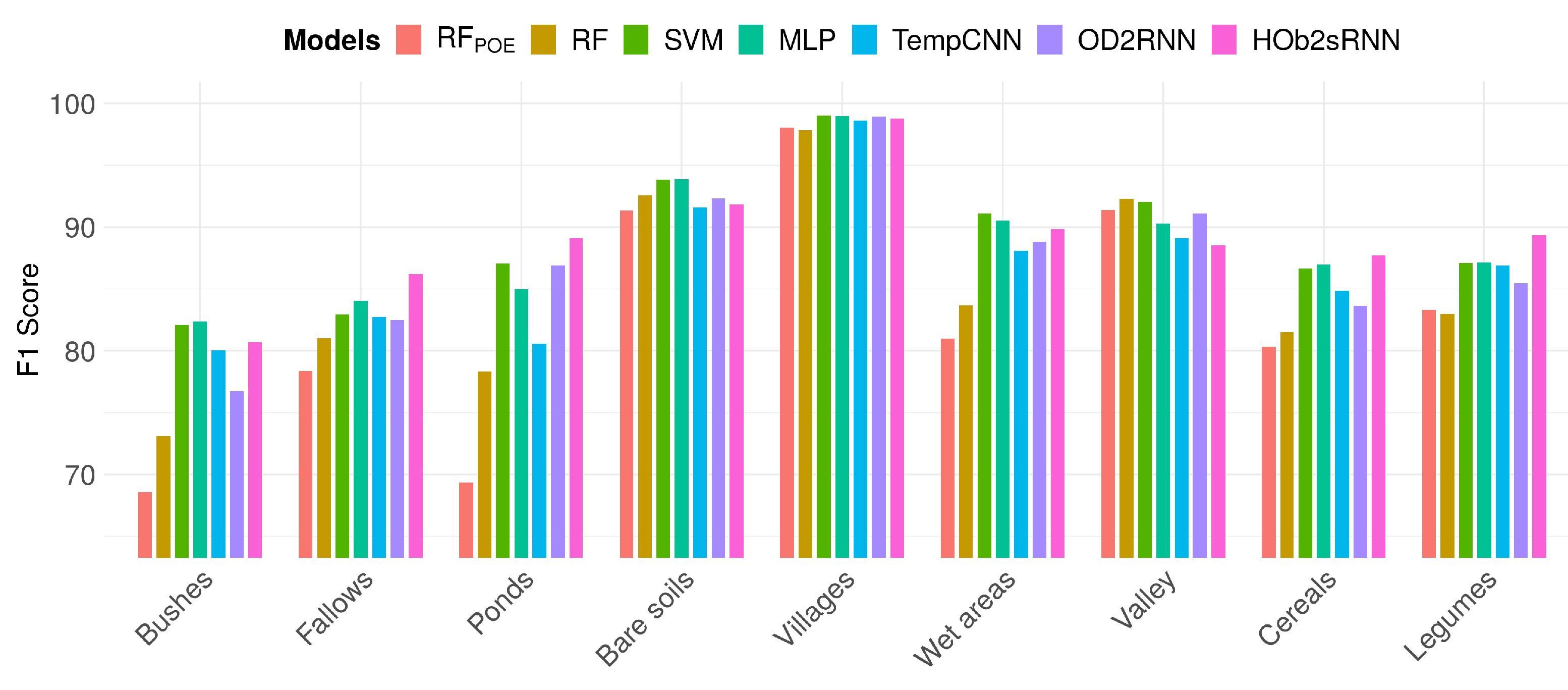
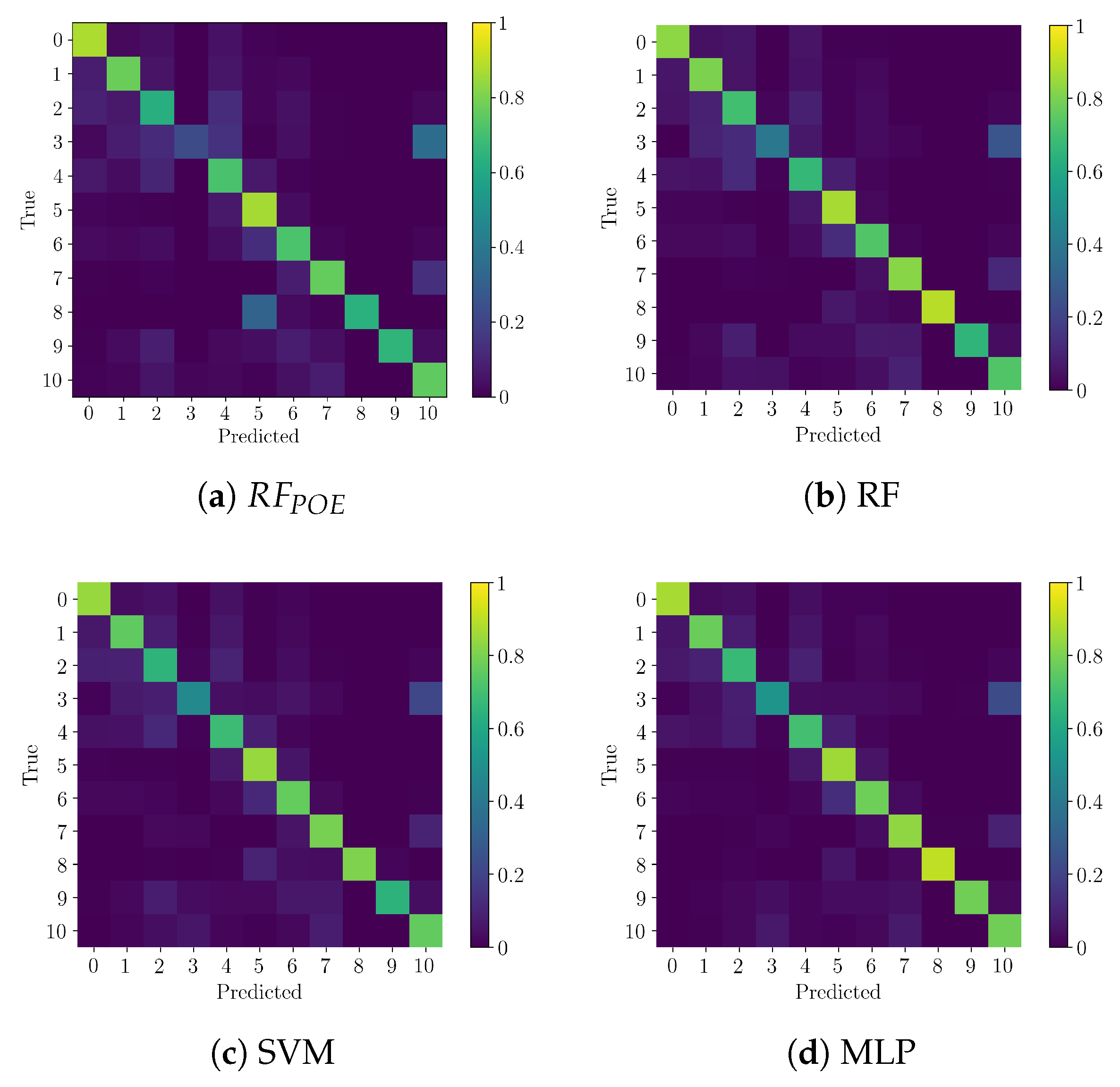
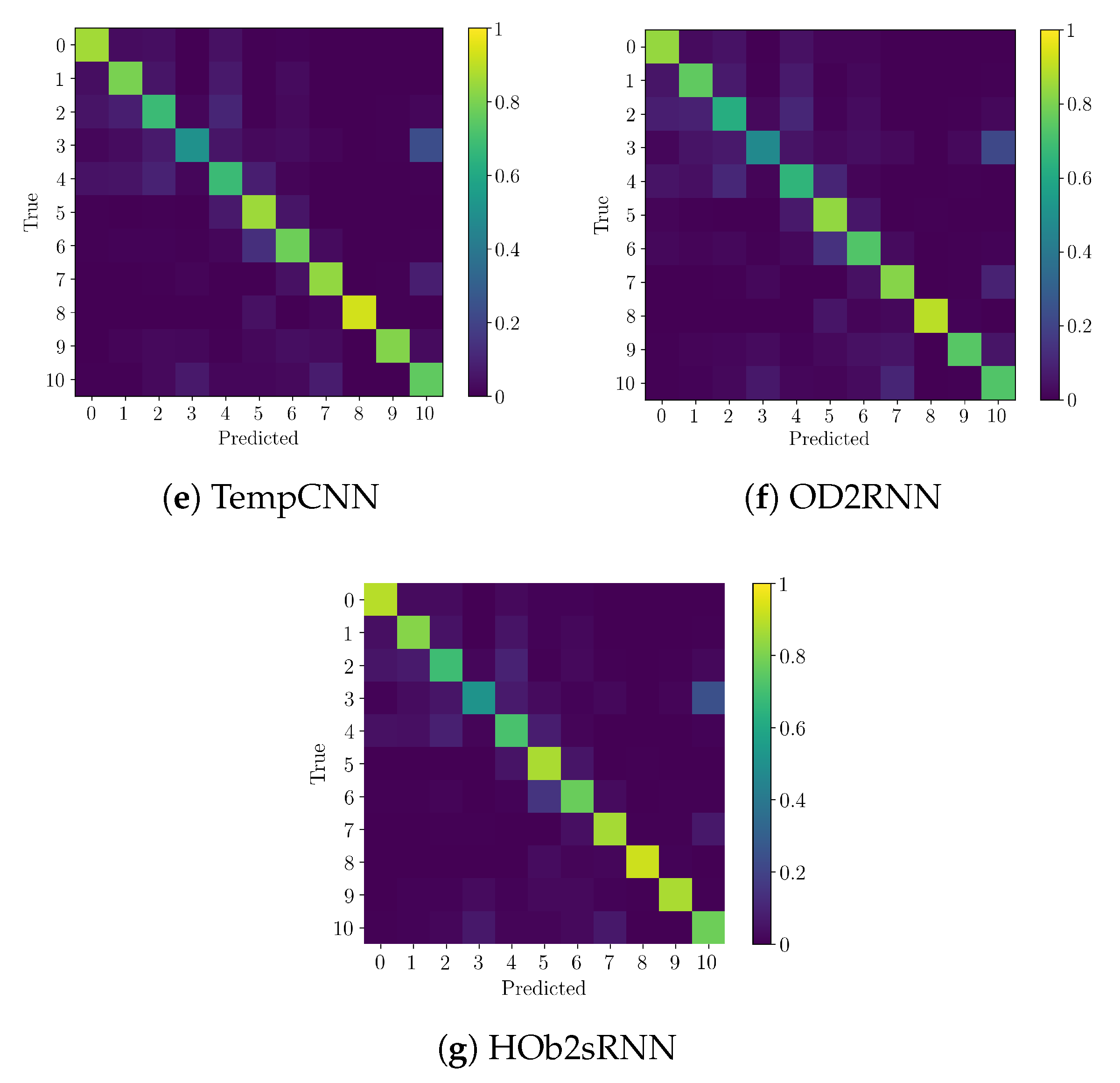
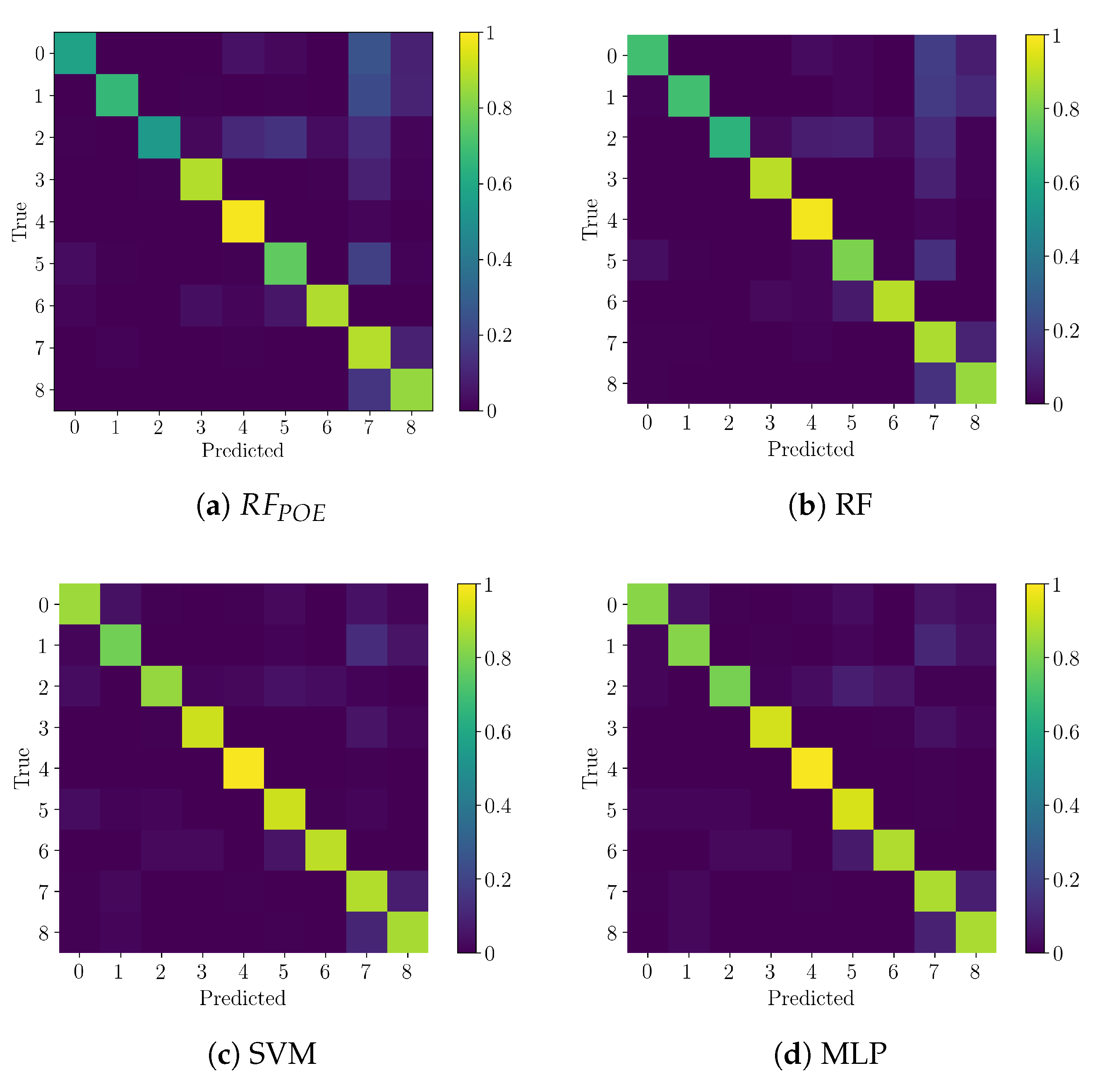
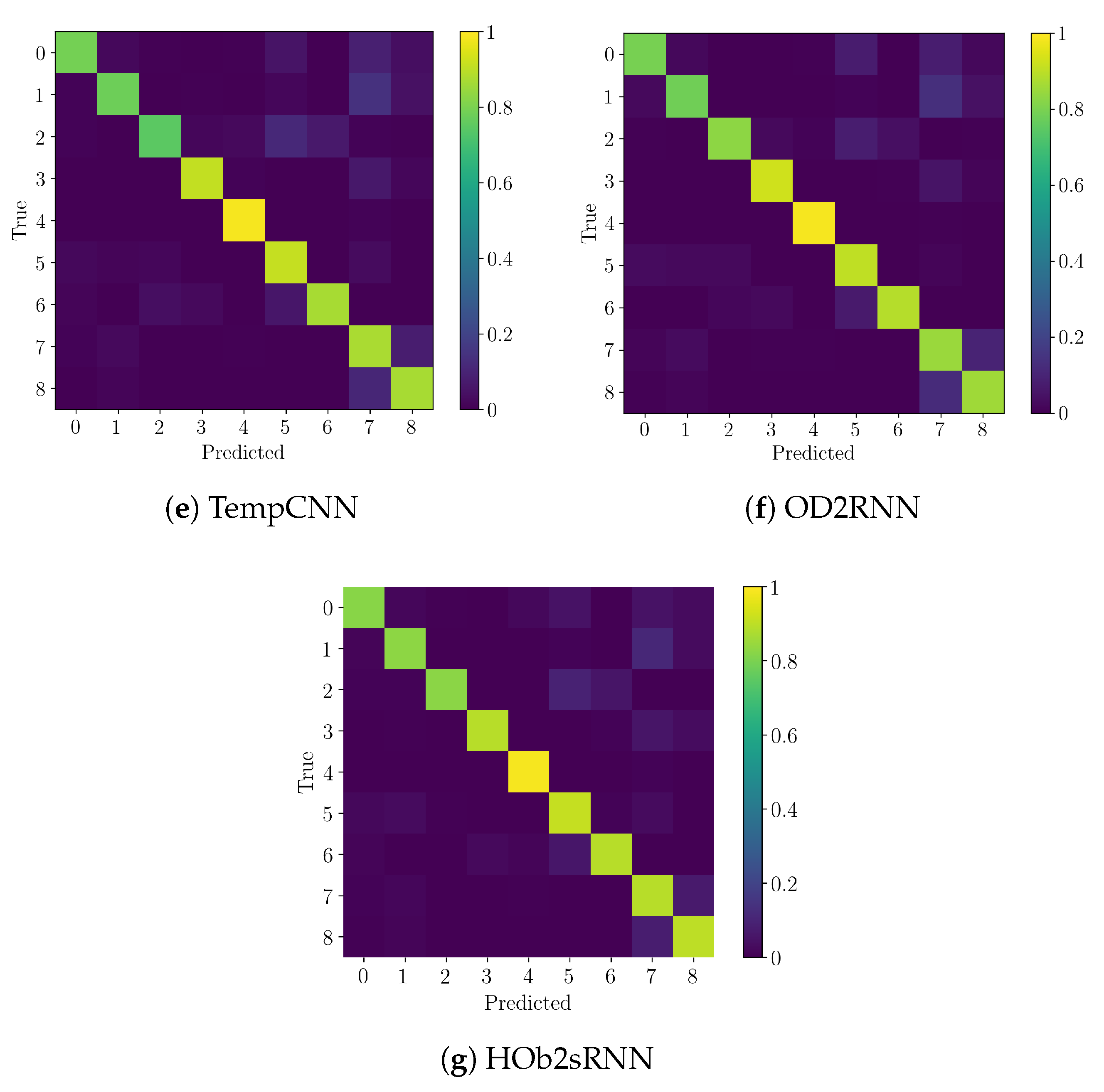
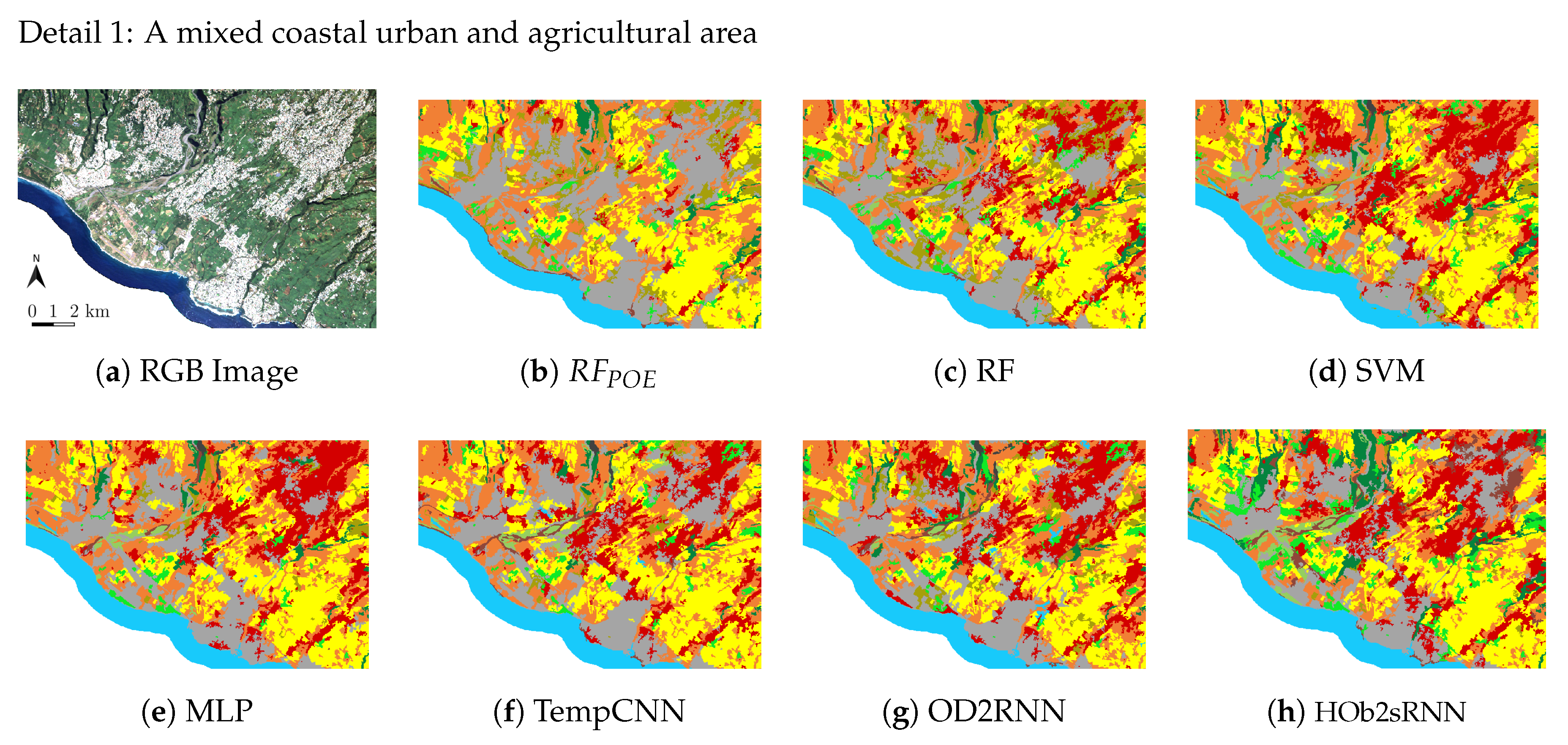
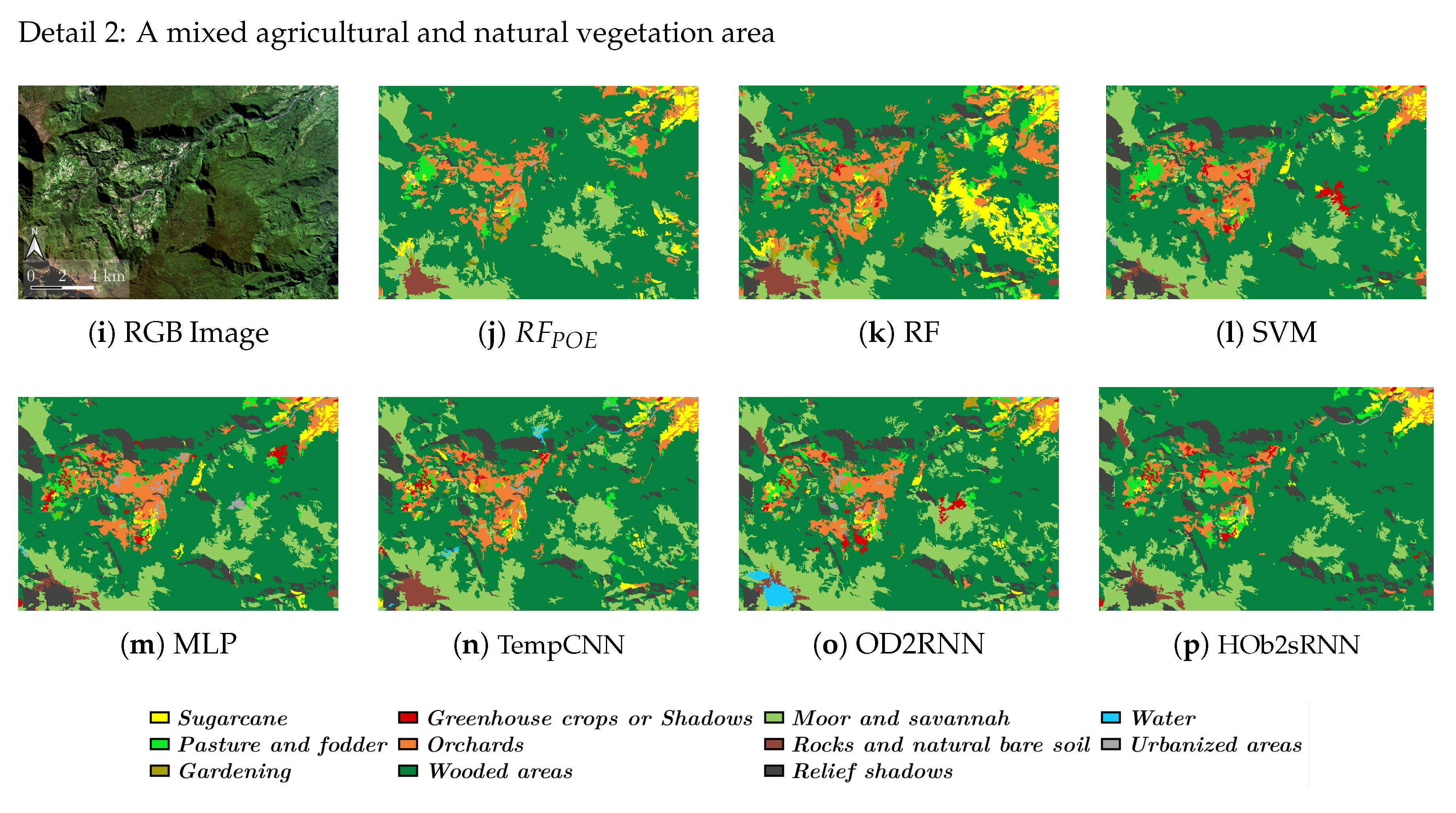
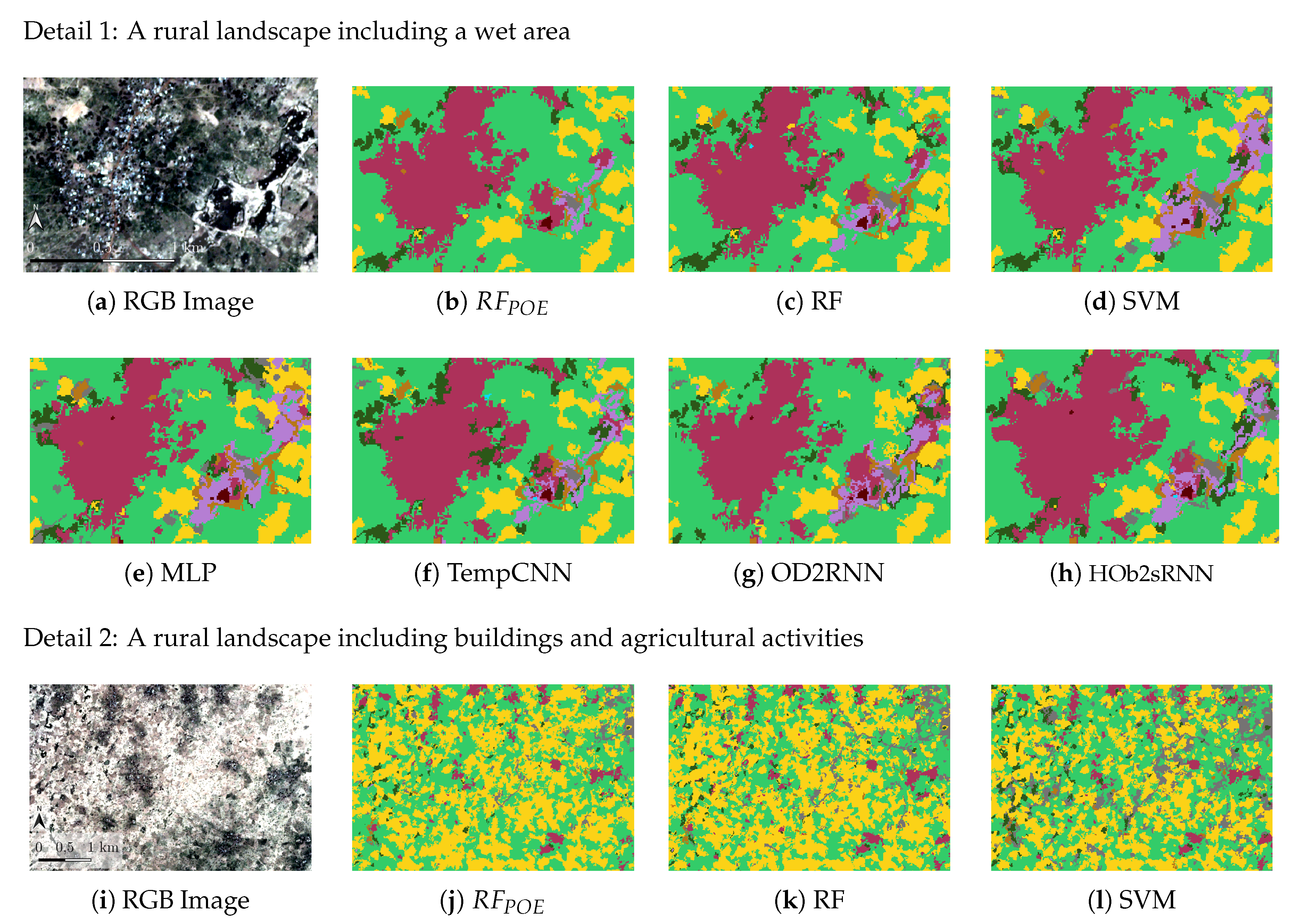
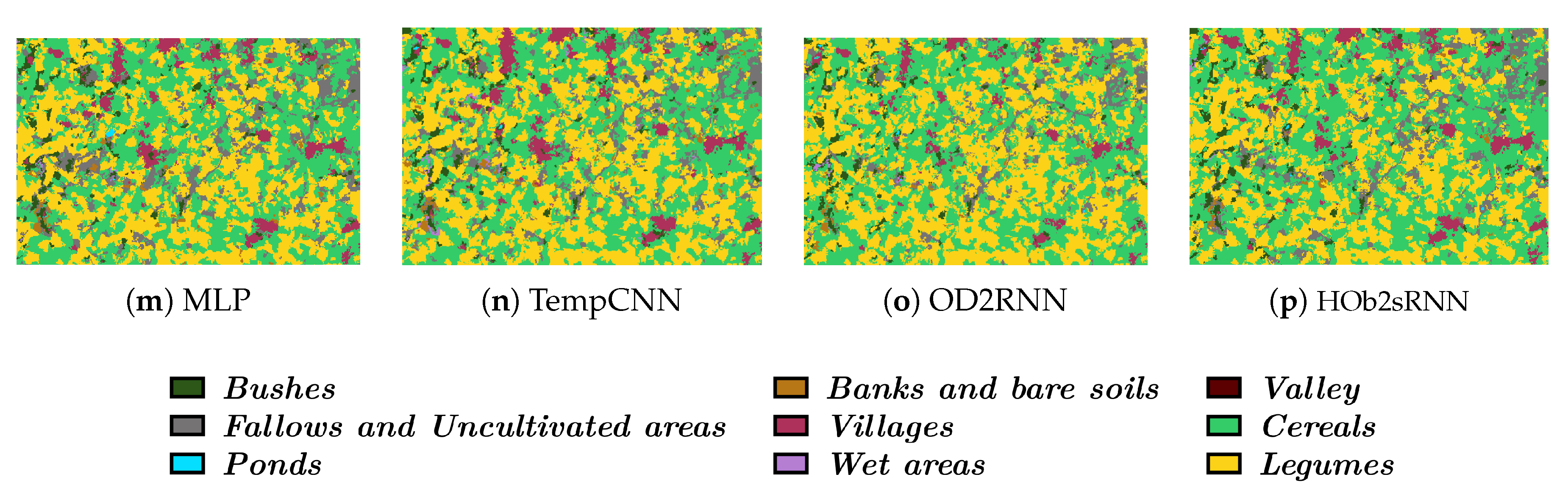
To summarize, the proposed deep learning framework exhibits convincing performances in land cover mapping considering situations characterized by a realistic amount of available training samples. The comparison with other machine learning approaches underlines three points: (i) our approach clearly outperforms the RF classifier that is a common strategy employed to deal with SITS classification; (ii) other standard machine learning methods, i.e., SVM and MLP, exhibit competitive behaviours with respect to our method on a study site that involves a small amount of labeled samples; and, (iii) our proposal surpasses, on both study sites, the adaptation of the recent TempCNN competitor for the multi-source scenario. Such result points out again that, beyond modelling the temporal correlation exhibited by SITS data via RNN or CNN approaches, in a multi-source context other features be worthy to be considered: the hierarchical class relationships as well as the way in which radar/optical information may be combined.
The ablation study indicates that HOb2sRNN is capable to exploit the complementarity between the radar and optical information, always improving its performances with respect to using only one of the two sources. Our framework integrates background knowledge via hierarchical pretraining leveraging taxonomic relationships between land cover classes. The experiments highlight that such knowledge seems valuable for the model and it systematically ameliorates its behaviour. On the other hand, some other type of considered knowledge, i.e., the NDVI index, seems less effective due to the fact that, probably, the model is capable to overcome it. Such observation was also highlighted by [
43]. These points clearly pave the way to further investigation about which and how knowledge can be injected to guide/regularize the learning process of such techniques. In addition, the analysis conducted on the
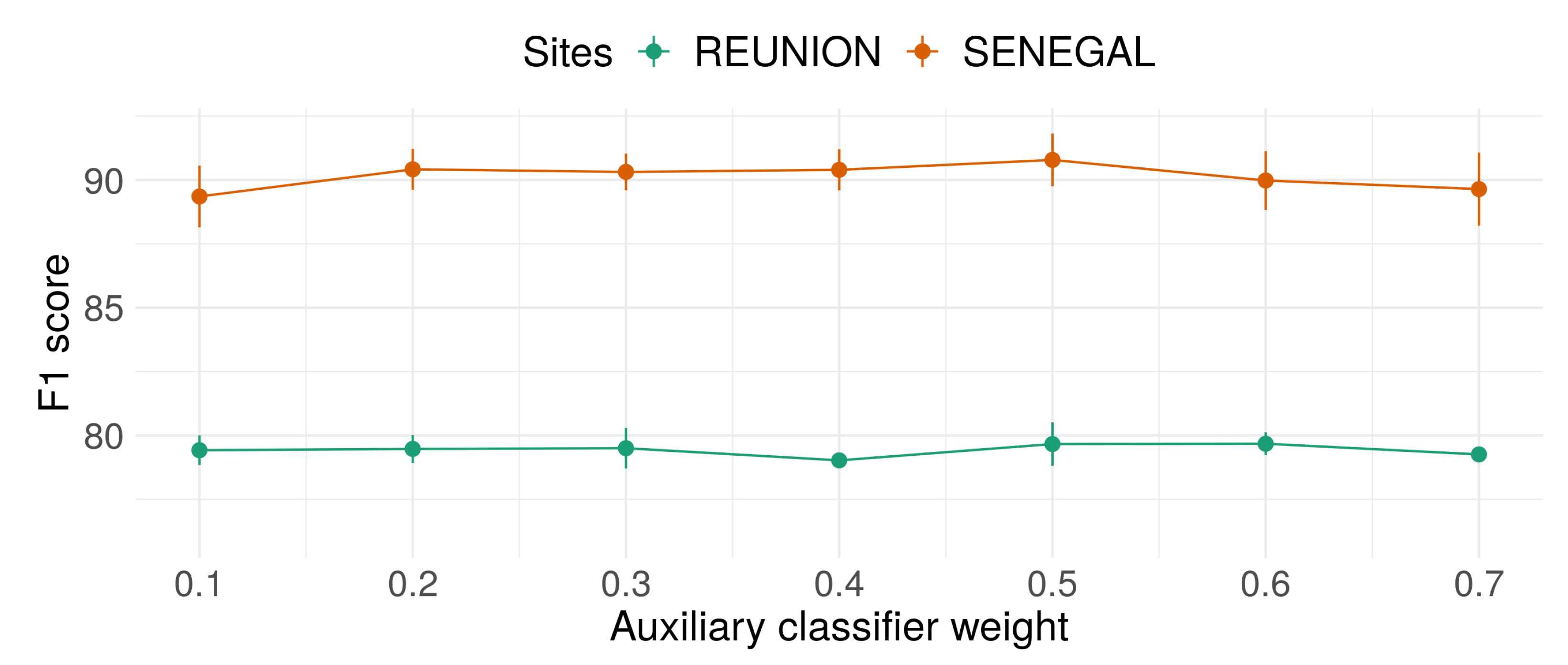
hyperparameter demonstrates that the integration of the auxiliary classifiers, in the training procedure, brings added value still considering small weighting values.
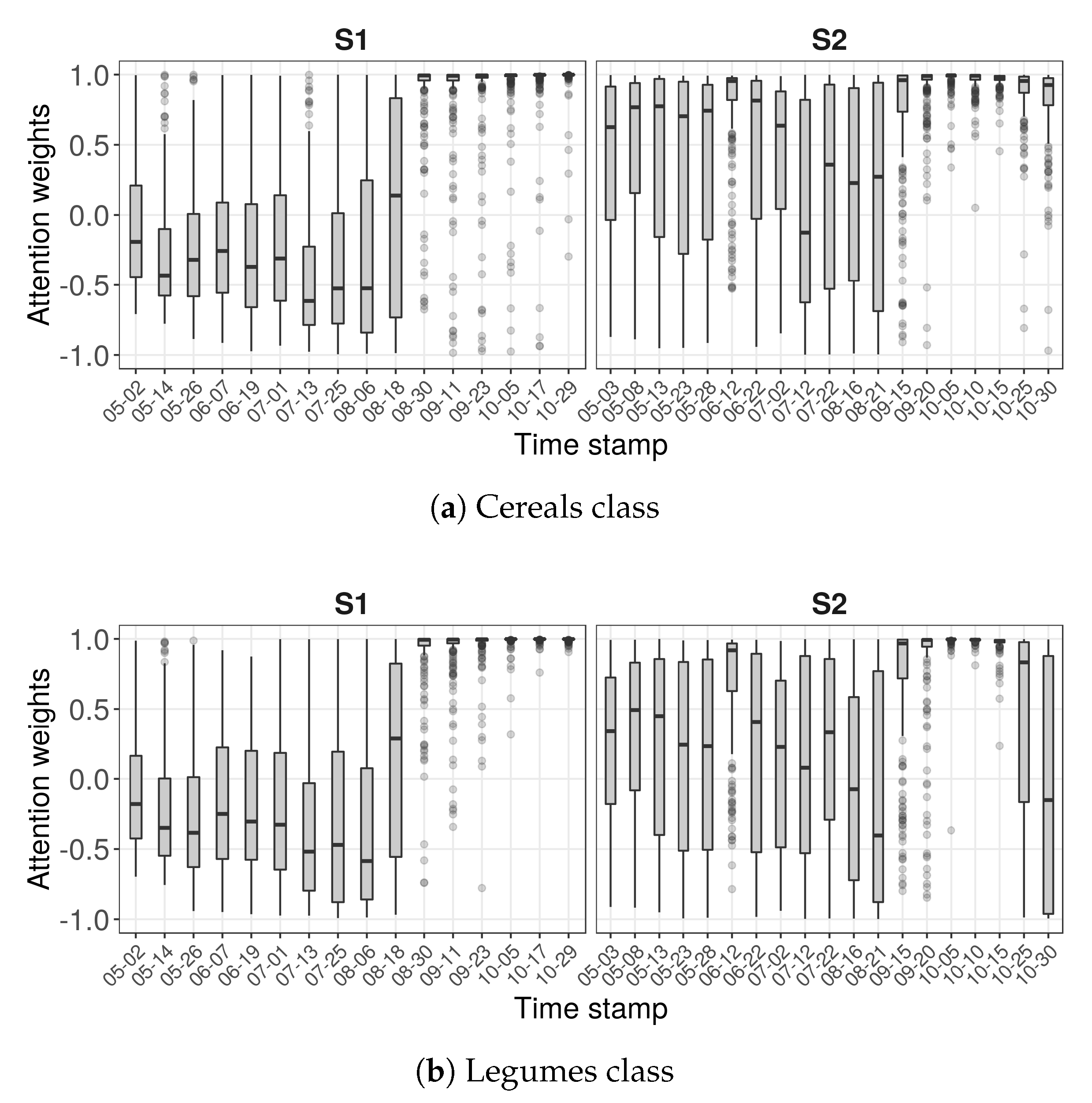
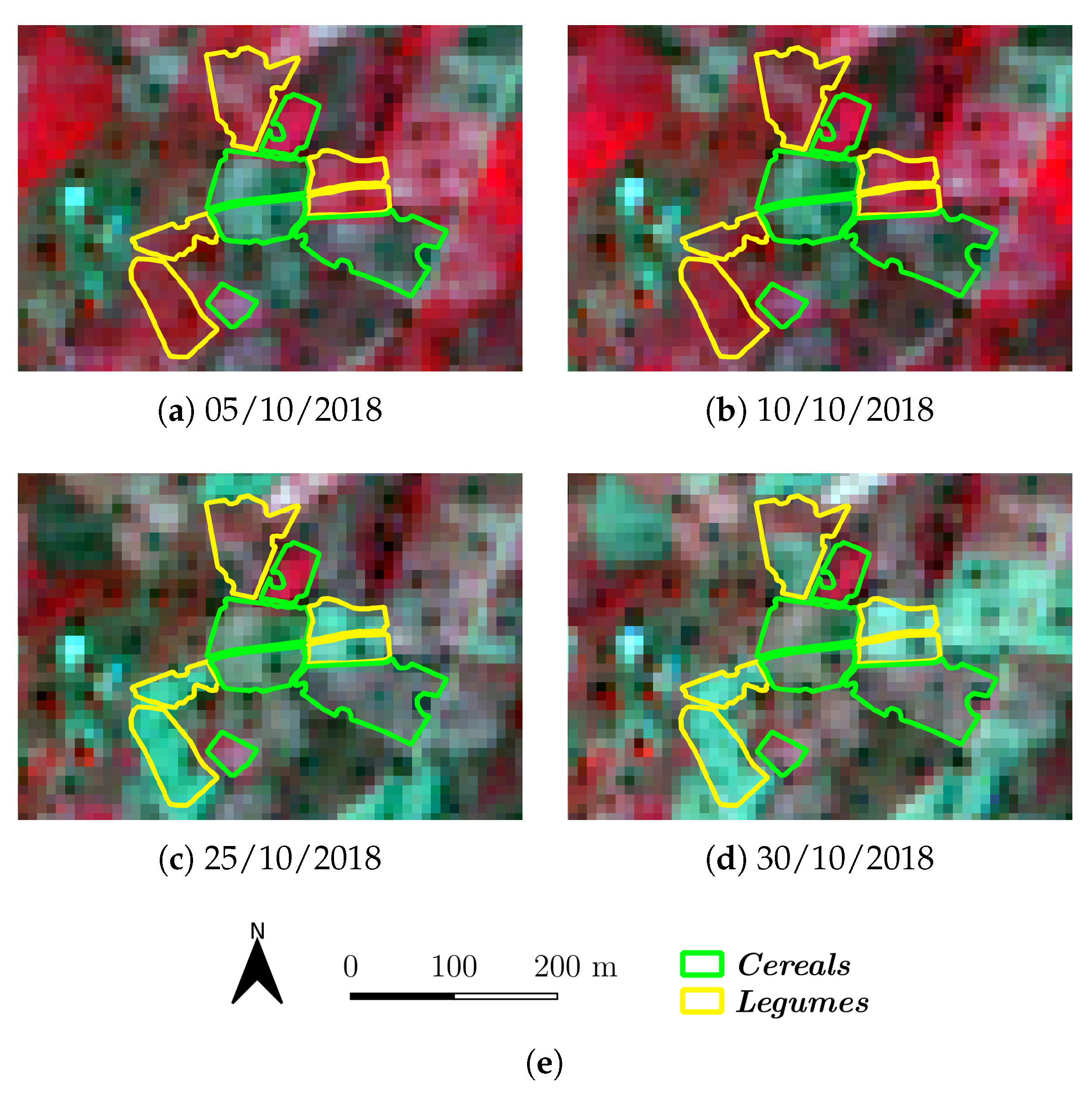
When considering the model interpretability, we have also provided some qualitative studies about the side information that can be extracted from our framework. The qualitative results we obtain are in line with the agronomic knowledge we obtained from the considered study area. Make the black box grey is an hot topic today in the machine learning community [
50] and we can state, with a certain margin of confidence, that solutions or answers associated to this question will be available in a near future.
We recall that our framework works under an OBIA setting. This means that its performances are tightly related to the quality of the underlying segmentation process that is sensitive to several elements [
51], for example: the employed segmentation algorithm, since different algorithms show different pros and cons; the determination of the scale parameter for the particular segmentation algorithm, since useful information can be available at different scales and the co-registration among different sources when working with multi-source data. If on one side, all of these elements carrying in opportunities to properly model the underlying information available in the considered remote sensing data for the analysis at hand, on the other side they can constitute possible sources of errors that are propagated until the land cover mapping result. We underline that it is out of the scope of this work to investigate how such elements impact the subsequent analysis since they deserve a complete and extensive study also in light of the recent adoption of deep learning techniques in the remote sensing domain. Here, we have focused our effort on the multi-source land cover mapping task assuming that the object layer, derived by the segmentation, is an input of our framework. For this reason, we believe that progress in the OBIA field, improving the extraction of the object layer from remote sensing data, can only ameliorate downstream analysis, like the one proposed in this work.
Finally, we remind that operational/realistic constraints might be considered when dealing with remote sensing analysis. Constraints can be related to available resources, i.e., timely production of land cover maps or limited access to training samples. We are aware that, in operational/realistic scenario characterized by the almost real-time production of land cover maps (i.e., disaster management [
52]), more computationally efficient solutions needs to be preferred (i.e., MLP or SVM) to deep learning approaches. On the other hand, in our work, we deal with (agricultural-oriented) land cover mapping where, land cover maps need to be provided with a relative low time frequency (once or twice per year). Due to this fact, here, the operational constraints are mainly intended regarding the limited amount of available labeled samples. In such data paucity setting, our approach clearly outperforms the Random Forest classifier, which is the de facto strategy involved in the operational classification of SITS data [
53]. In addition, the experimental evaluation pointed out that, less explored machine learning techniques in the context of SITS analysis, i.e., SVM and MLP, deserve much attention, since they constitute valuable strategies to which compare future proposals.

 ,
, 























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}