1. Introduction
Global warming influences every region of the world. Its effects have been visible for a long time: ice loss in the poles with a consequent increase of the sea level, extreme meteorological events with an increase in rainfalls, more frequent droughts, increase in the frequency and intensity of heat waves [
1], etc. For example, in the center and the south of Europe, heat waves, forest fires, and droughts appear more frequently than in the past. Furthermore, the European urban regions, where 80% of Europeans live, are exposed to extremely strong heat waves which occur more and more frequently [
1]. In addition, it has been well documented that urban environments suffer sharper increases of their temperatures than rural areas [
2]. This is known as Urban Heat Island (UHI) effect [
2]. Multiple agents causing UHI have been detected: human activity, population growth, land cover modification, and, of course, global warming [
2]. Moreover, UHI leads to air pollution increases, population health issues, and alterations in the energy consumption needs. For instance, during the summer of 2019, the heat waves in France reached up to 45
C, corresponding to 4.5
C higher than the heat waves of 2003, which have been estimated to have killed around 70,000 people in Europe [
3]. Solutions to stop this increase of heat wave frequencies and intensities are required. For the solutions to be adapted to deal with the problem, a good understanding of the sources, causes, and dynamics of urban warming is necessary.
Traditionally, UHI makes reference to the air temperature difference between rural and urban areas [
4]. However, air temperature data are not able to continuously cover large urban extents [
5,
6]. On the other hand, aerial remote sensing, covering large areas that may include both urban and rural environments, allows studying the Surface Urban Heat Island (SUHI) effect, defined as the Land Surface Temperature (LST) difference between urban and rural areas [
7]. Although SUHI is dominated by different physics than UHI, both have been shown to be correlated, especially during night [
7,
8]. However, even if airborne remote sensing provides high spatial resolution images (a few meters), higher resolutions are sometimes needed to analyze the correlation between LST and urban materials, allowing to identify sources and wells of SUHI. Thermal unmixing methods [
9,
10,
11] provide intrapixel abundance and temperature maps, for a given number of scene materials (previously defined) and from a given thermal radiance image. These methods can be effective to analyze the link between LST and materials (or endmembers), and then to identify which materials lead to the development of SUHI. Thus, they allow studying how the temperature of different materials varies according to their sun exposure, their location, or the time of day (if several images at different acquisition times are available), among other factors [
9,
10,
11].
Initially, reflective-thermal approaches were developed [
9]. These methodologies were based on two steps: (1) the estimation of intrapixel material abundances by using radiances from the reflective domain together with classical reflective unmixing methods [
9,
12]; and (2) the estimation of intrapixel temperatures by using thermal radiances and these previously obtained intrapixel abundances. However, the need of bands in the reflective domain avoids nighttime application, when SUHI and UHI are more correlated, but also when reflective radiances are not available. In addition, to perform future high spatial resolution studies in cities, Unmanned Aerial Vehicles (UAVs) appear as ideal [
13], and having only thermal bands allows reducing UAV mission costs. Currently, different thermal unmixing approaches using only Thermal InfraRed (TIR) bands exist. Thus, among the first developed methodologies, the Temperature and Emissivity Separation using Spectral Mixture Analysis (TESSMA) supposes homogeneous intrapixel temperatures [
14] and is hence not perfectly adapted to thermal unmixing [
15]. On the other hand, classical spectral unmixing methods, such as Fully Constrained Linear Square Unmixing (FCLSU) [
12], can be applied on the thermal domain by considering that the couple of temperature and emissivity spectrum defines a given material [
16]. However, this approach considers the temperature of a given material to be constant across the image. Another option is the emissivity-based unmixing method, which is based on the application of classical spectral linear unmixing methods to the emissivity spectra to obtain the intrapixel abundances, and then estimating the intrapixel temperatures by considering the black body law of a composed flat surface [
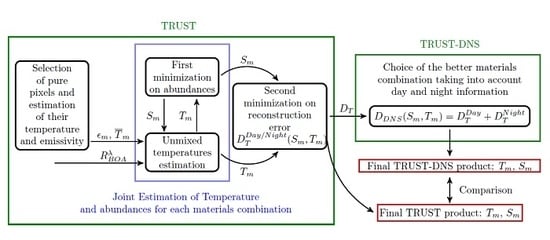
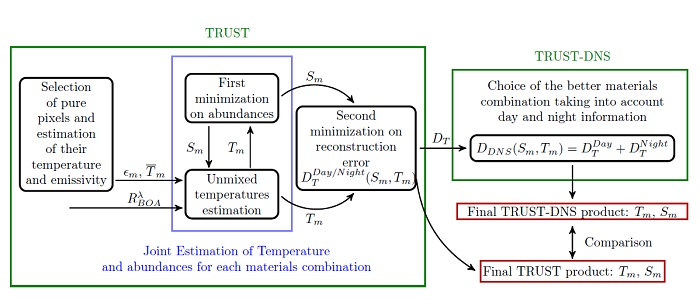
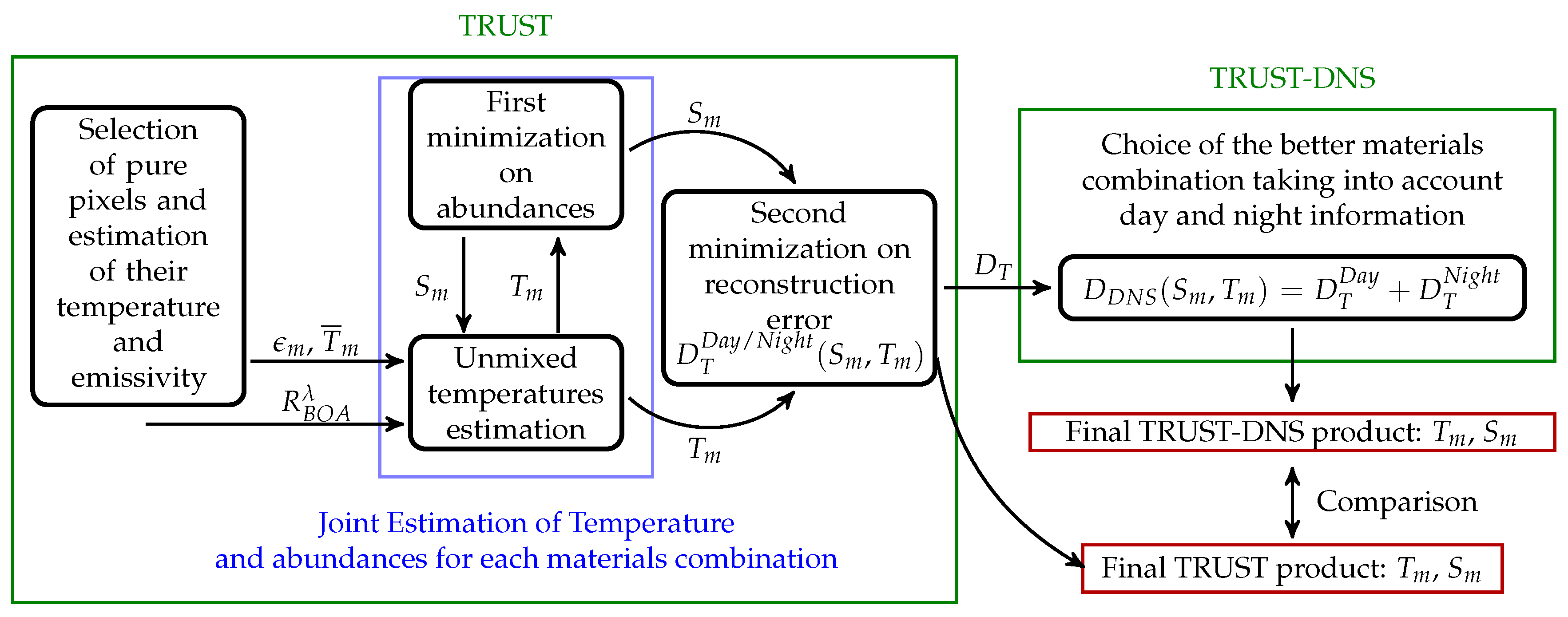
10]. The main issue of this method is that it does not consider material temperature differences when estimating the abundances, and thus it lacks a principal source of TIR information during unmixing. Finally, among the most advanced methods, Thermal Remote sensing Unmixing for Subpixel Temperature (TRUST) allows jointly estimating the intrapixel abundances and temperatures by minimizing the radiance reconstructed error [
11]. This method also allows intrapixel temperature variations and variations in the material temperatures across the image. The better performances of TRUST over other thermal unmixing methods have been already shown when it is applied on hyperspectral imagery with more than 30 thermal bands and at high spatial resolutions of about 1 m over simple scenarios such as roofs composed of three materials [
11,
16].
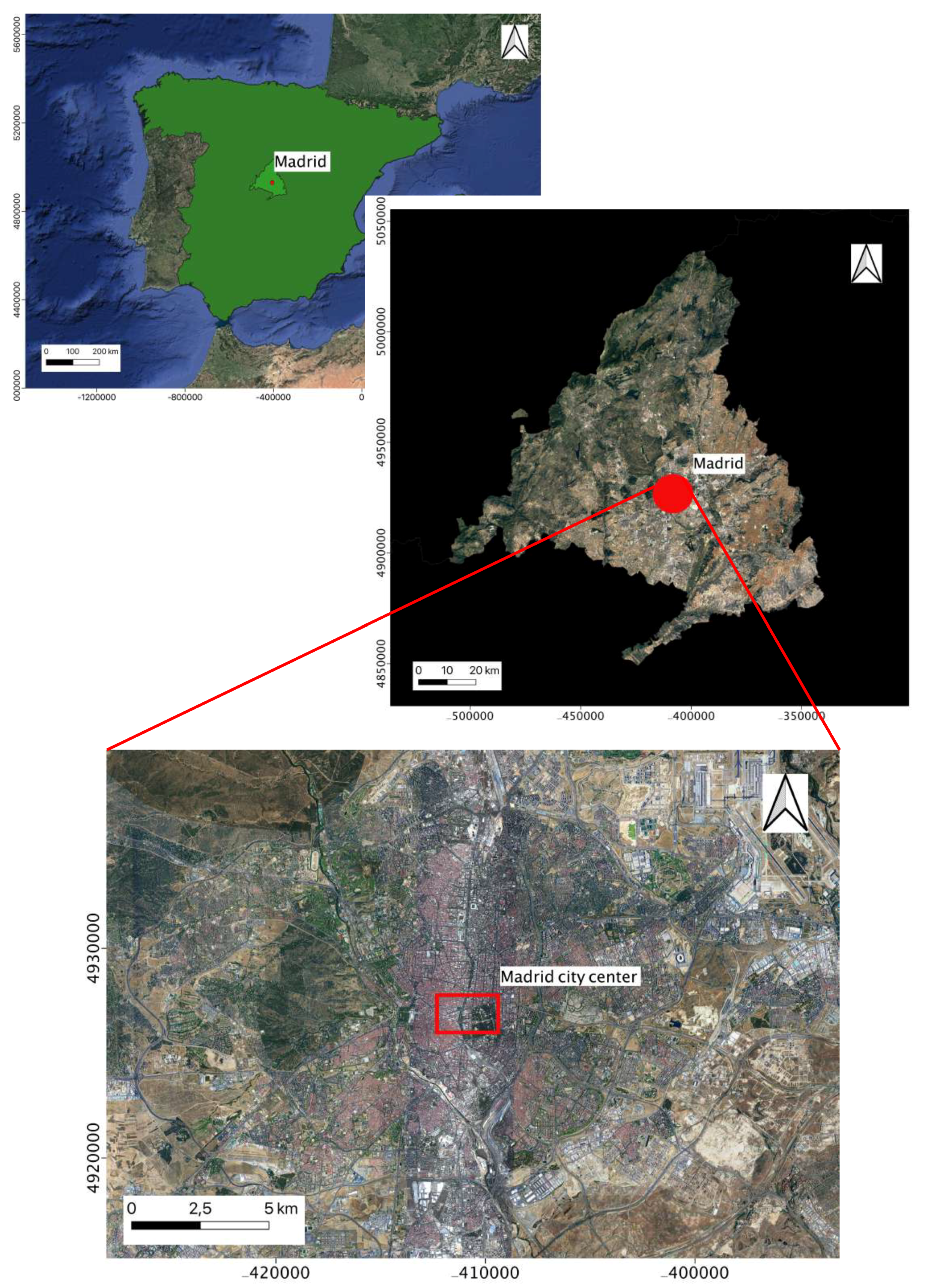
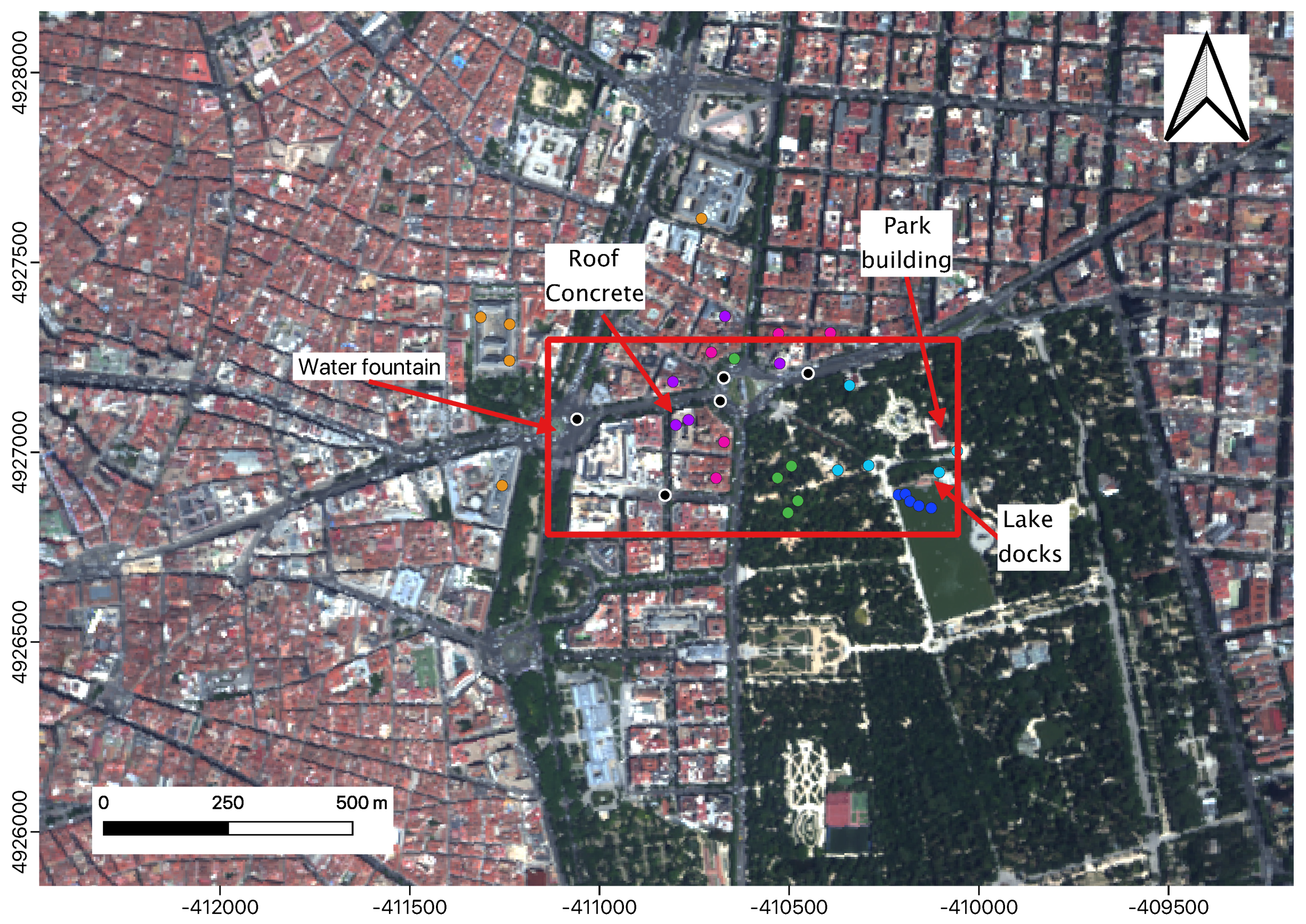
This work aims at illustrating the applicability of TRUST on multispectral (eight bands and 8-m resolution) images of a highly heterogenous urban environment. With this purpose, Airborne Hyperspectral Scanner (AHS) imagery from Madrid city center acquired during the DESIREX 2008 campaign [
7] is used. Thus, for the first time, this article shows the relatively high performance of TRUST on an extremely challenging case where the spatial resolution and the number of bands are degraded, and where the studied scene is highly heterogeneous. In addition, TRUST performance is studied on both daytime and nighttime images of Madrid city center. Due to all these advances, many new applications can be imagined for TRUST. Finally, a new method, called TRUST Day and Night Synergy (TRUST-DNS), based on TRUST, is developed to take advantage of the combination of daytime and nighttime images. This work shows that TRUST-DNS outperforms TRUST, thus illustrating the advantage of multitemporal data fusion for unmixing enhancement.
This article is structured into six sections. In
Section 2, the DESIREX data used in this study are described. Then, in
Section 3, TRUST and its improved version TRUST-DNS are presented. In
Section 4, first, the pure material emissivity spectra and temperatures are defined; second, a calibration of TRUST and TRUST-DNS is performed before applying these methods on Madrid city center AHS images; and, third, the abundances and temperature retrieval performances of TRUST-DNS and TRUST on day and night images are compared. These results are discussed in
Section 5. Finally,
Section 6 presents some conclusions and perspectives.
5. Discussion
This article evaluates the potential of TRUST and TRUST-DNS to perform urban LST cartography with a better spatial resolution than the previous acquired images. Moreover, TRUST and TRUST-DNS allow linking manmade and natural materials to different temperature behaviors, and thus appear as powerful tools for the characterization and understanding of SUHIs at high spatial resolution. In addition, several methodological aspects of TRUST (TRUST-DNS) can be tuned to improve its performances as a function of the city structural and material characteristics. It is also important to take into account that in this study only eight thermal spectral bands were used, while in previous TRUST studies no fewer than 32 bands were used. Of course, the more spectral bands there are, the better the performance [
16], and thus this study places the methodology at the limits of its applicability.
5.1. Endmembers Definition in the Thermal Domain
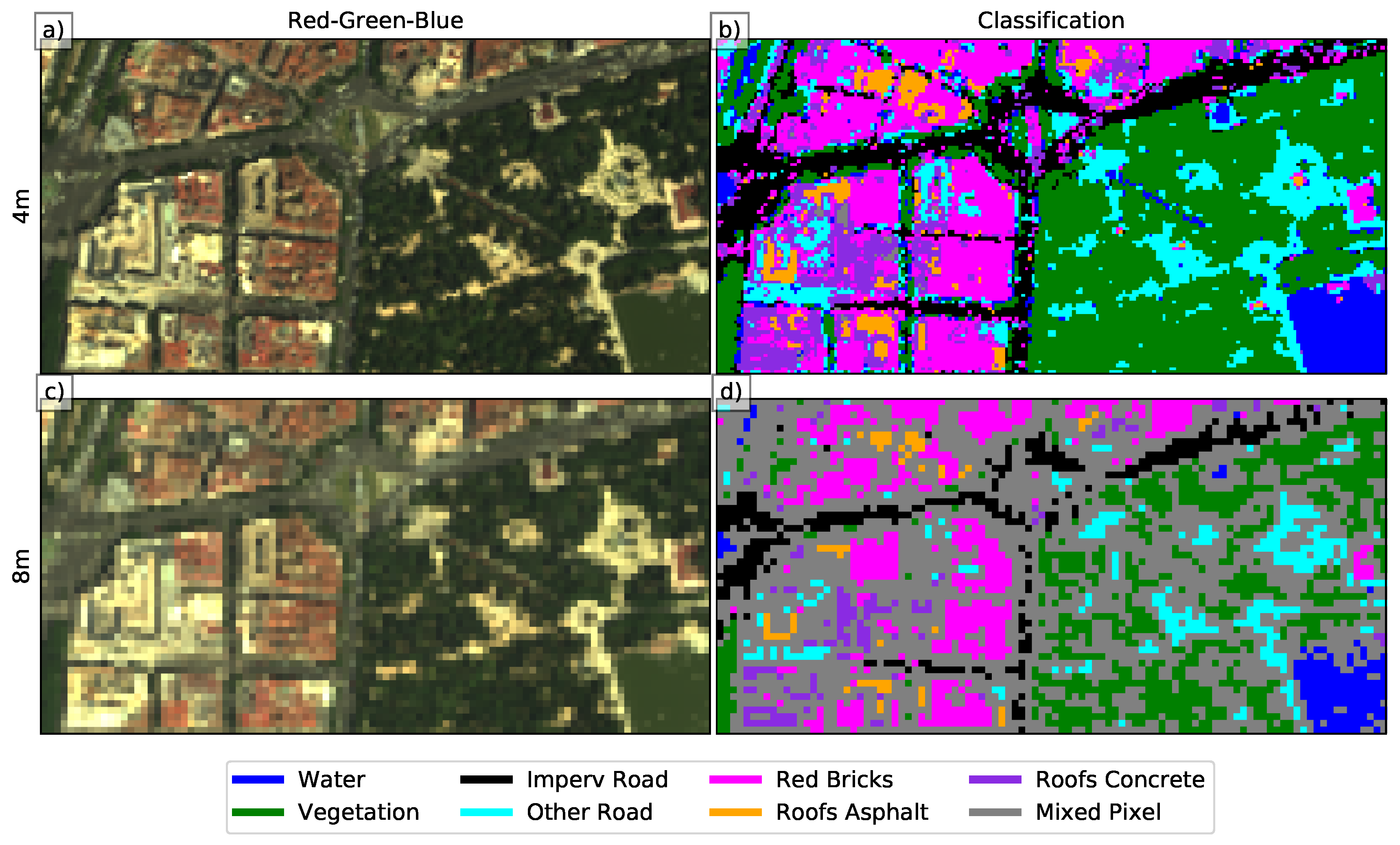
The ideal number of endmembers defined to unmix a given scene strongly depends on the scene and the image resolution. Thus, the number of pure materials should increase when the scene heterogeneity and/or the image resolution increase. However, too many pure materials lead to a loss of unmixing performances since the number of possible material combinations increases exponentially with the number of endmembers, inducing inaccuracies in the minimization of the radiance reconstruction. Having a previous classification at a slightly better resolution (in this case, the previous classification at 4 m and the radiance images at 8 m) allows recognizing the number of endmembers which is adapted to the scene and resolution. Furthermore, since DESIREX classification was done with 80 reflective and thermal bands and we have only eight, we decided to slightly decrease the number of pure materials defined in the DESIREX classification. Thus, from the two water and two vegetation classes, only one was retained to define each class. In addition, since TES presents low performances on metallic materials [
23], “roofs made of metal” class was not used.
Furthermore, different methodologies can be used to define the emissivity spectra and mean temperatures of endmembers. In this work, based on [
11,
16], five pure pixels in the image were manually selected to define each pure material. Indeed, as recommended by [
7,
11,
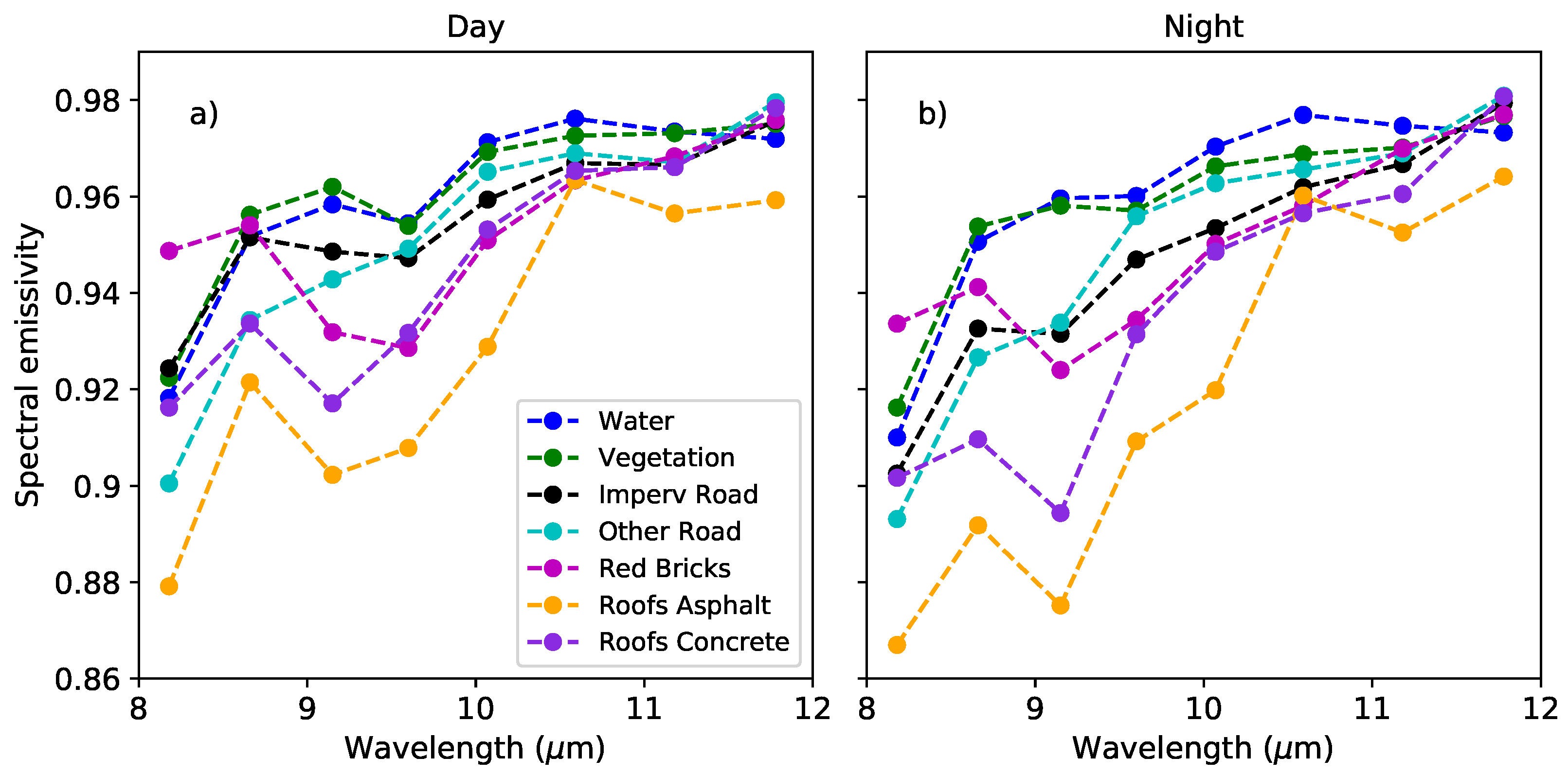
20], TES algorithm was used on both day and night images to obtain the emissivity spectrum and temperature of each manually selected pixel. However, emissivity differences between day and night pixels are found (see
Figure 5). These differences are lower or equal to 2% of emissivity, which is within the range of the TES emissivity retrieval accuracy (1.5% was found by Gillespie et al. (1998) [
23] and 3% by Oltra-Carrio (2013) [
20]). Small co-registration errors and viewing angles differences between day and night images can also explain these small differences between day and night pure material spectra. In addition, atmospheric reflective contribution, which is more important during day, can be misestimated, influencing the emissivity characterization. A slight trend to small values at short wavelengths is also observed, especially for night emissivities. This may be partially explained by the 8-
m band to be slightly influenced by water absorption bands below 8
m. Atmospheric water vapor content during 4 July acquisitions was 1.5 g cm
during day and 2.5 g cm
during night [
7].
5.2. TRUST and TRUST-DNS Performances
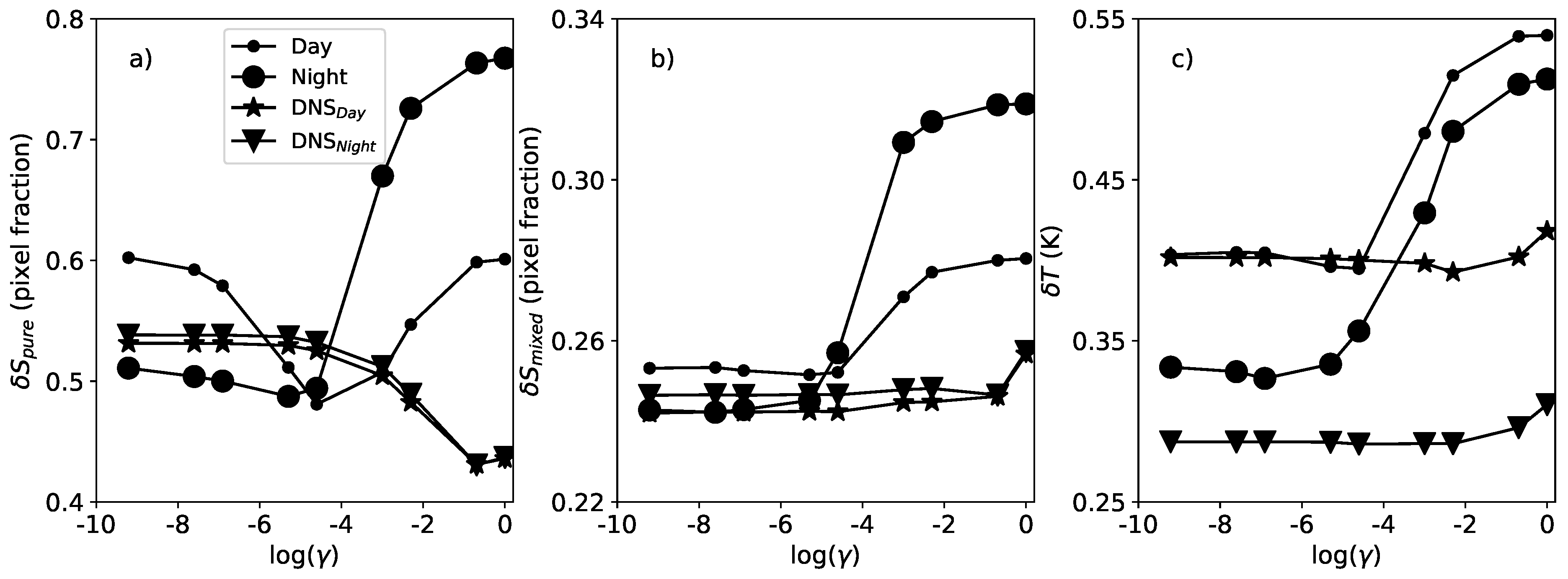
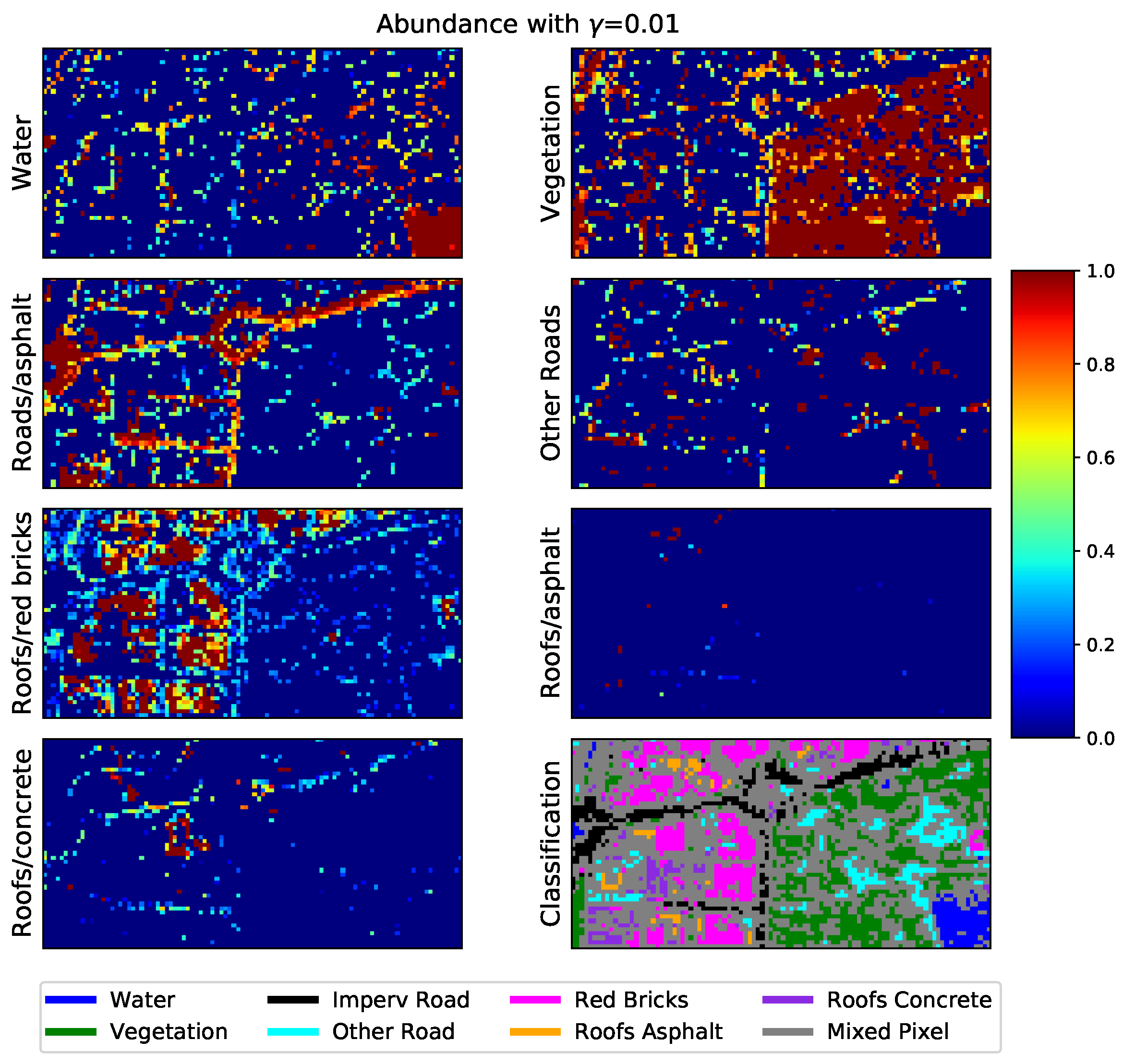
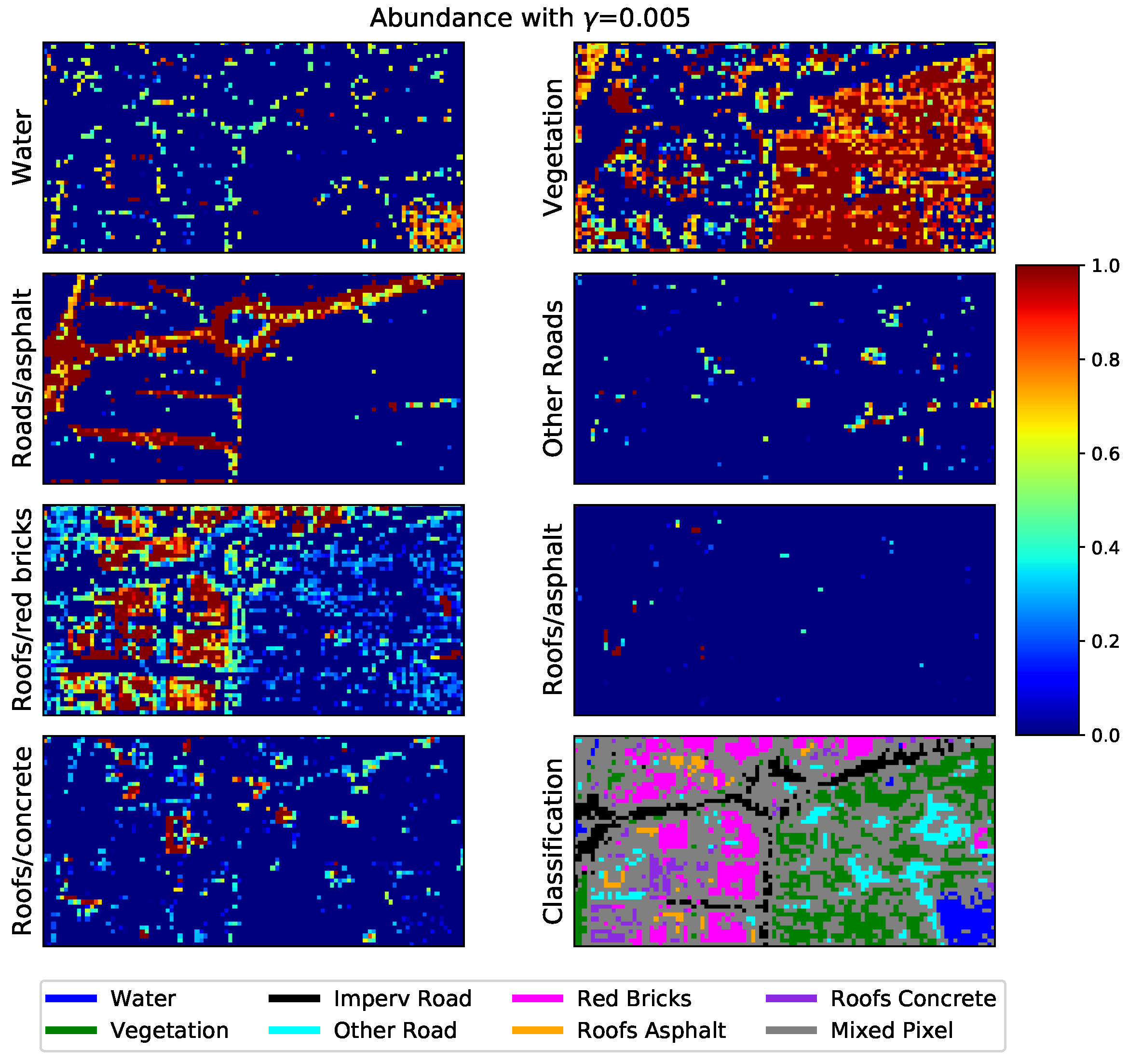
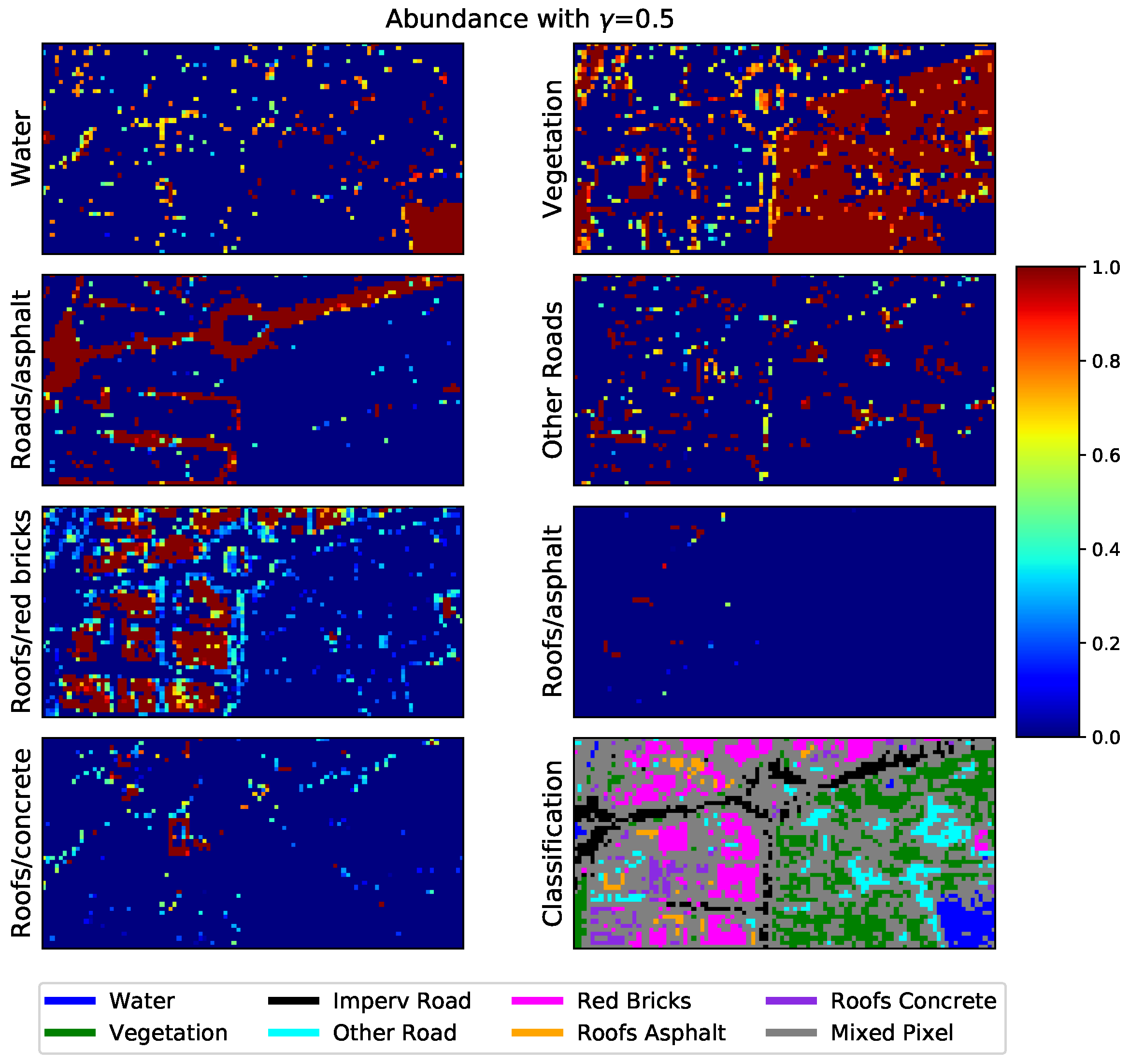
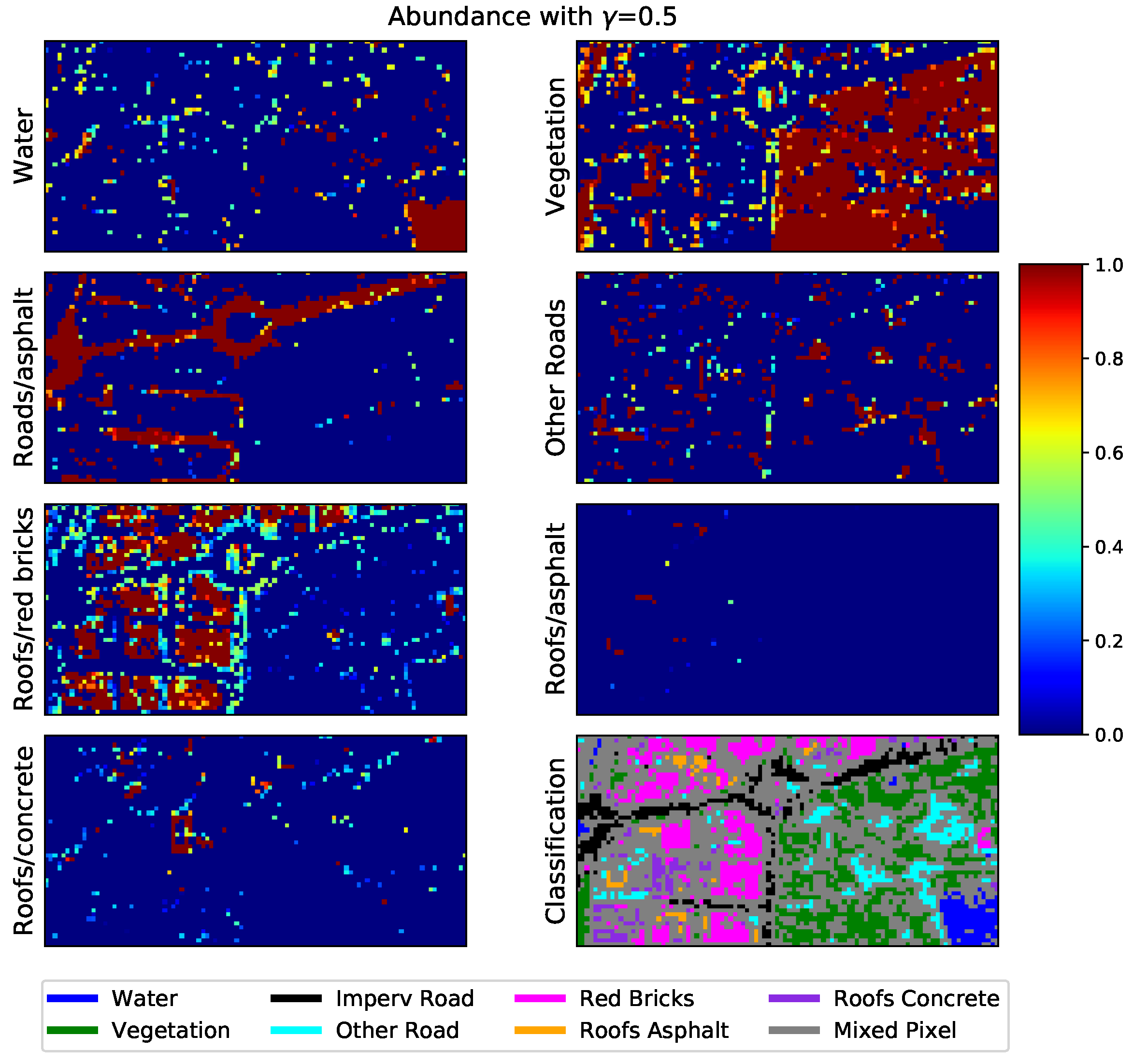
TRUST-DNS appears as more stable than TRUST when dealing with variations. In addition, the study on the choice of , showing the global unmixing errors, illustrates that, once the most performant is chosen, TRUST-DNS outperforms TRUST on both abundance and temperature retrieval.
However, these results should be analyzed carefully since the 4-m classification used as reference for the material abundances presents two main drawbacks, and consequently can lead to misestimations of the unmixing errors. On the one hand, this reference for the material abundances does not include a mixed pixel class even if at this resolution in urban environments mixed pixels appear. Then, having the DESIREX classification as reference induces inaccuracies, mainly in the estimation of the pure pixel abundance errors. This effect is observed in
Figure 6, where pure pixel abundance errors are double compared to those of mixed pixels, i.e., TRUST correctly finds mixed pixels where the classification considers pure ones, leading to an increase in the pure pixels abundance errors. Hence, using as reference a higher resolution classification of the studied area would allow going deeper in this study. Another option to advance in this study is to perform a new 4-m classification with a likelihood threshold in the maximum likelihood criterion, to consider mixed pixels. On the other hand, the resolution ratio between the classification used as reference and the unmixed image, being only of two, limits the abundance error quantification since reference abundances are restricted to few discretized values (0%, 25%, 50%, 75%, and 100% of the pixel) while TRUST (TRUST-DNS) abundances can take any value in [0%, 100%] range. However, greater ratios such as the 16-m/4-m one are not intended for the moment, since TRUST performances were strongly degraded when it was applied on lower resolution images (TRUST applied on 16-m resolution images of Madrid city center was tested within the framework of this work).
Thus, even if it is difficult to know which abundance map is better, since no accurate information is available (reference at 4 m), TRUST-DNS seems to better delineate urban objects such as streets, buildings, the park lake or vegetated areas. Thus, TRUST-DNS improves abundance retrieval performances on both day and night, especially on night. In addition, TRUST on day images performs better than TRUST on night. Both results indicate that day thermal contrast helps to unmix urban areas. Thus, day information helps to improve night unmixing when using TRUST-DNS.
Finally, for the temperature performance study, we decided to compare pixel by pixel the 8-m LST obtained directly with the TES method, with the aggregation (with the Wien’s law) of the unmixed LSTs, also at 8 m, but with intrapixel information. This choice was grounded in two main issues: (1) the spatial distribution of materials within a 8-m pixel is not known, thus comparing 8-m unmixed LSTs to 4-m LSTs from TES is not direct; and (2) comparing pixel by pixel 8-m unmixed LSTs with 4-m LSTs from TES for each material within the pixel leads to errors containing contributions from abundance and temperature retrieval errors. Thus, this choice allows dissociating temperature retrieval errors from abundance ones.
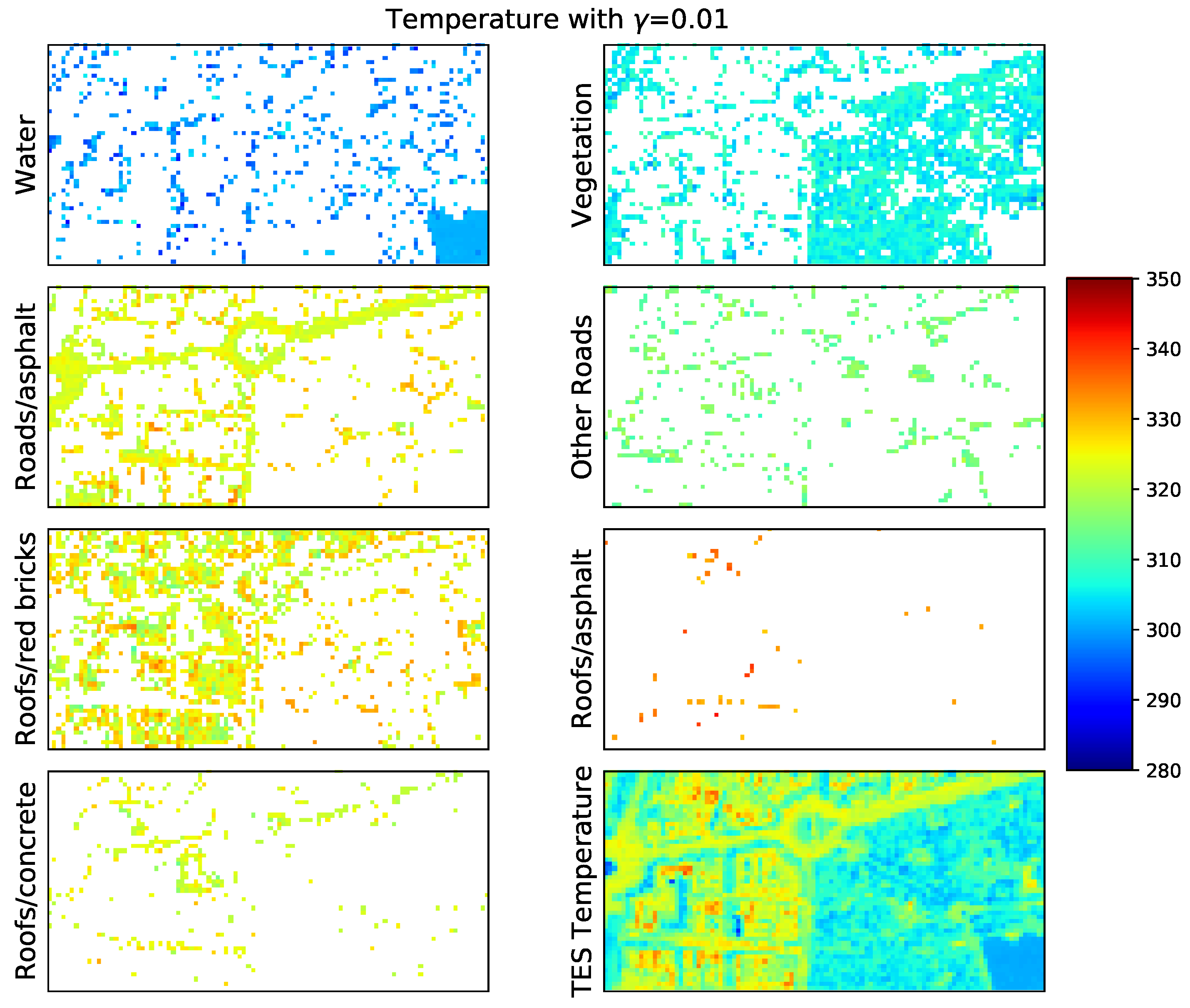
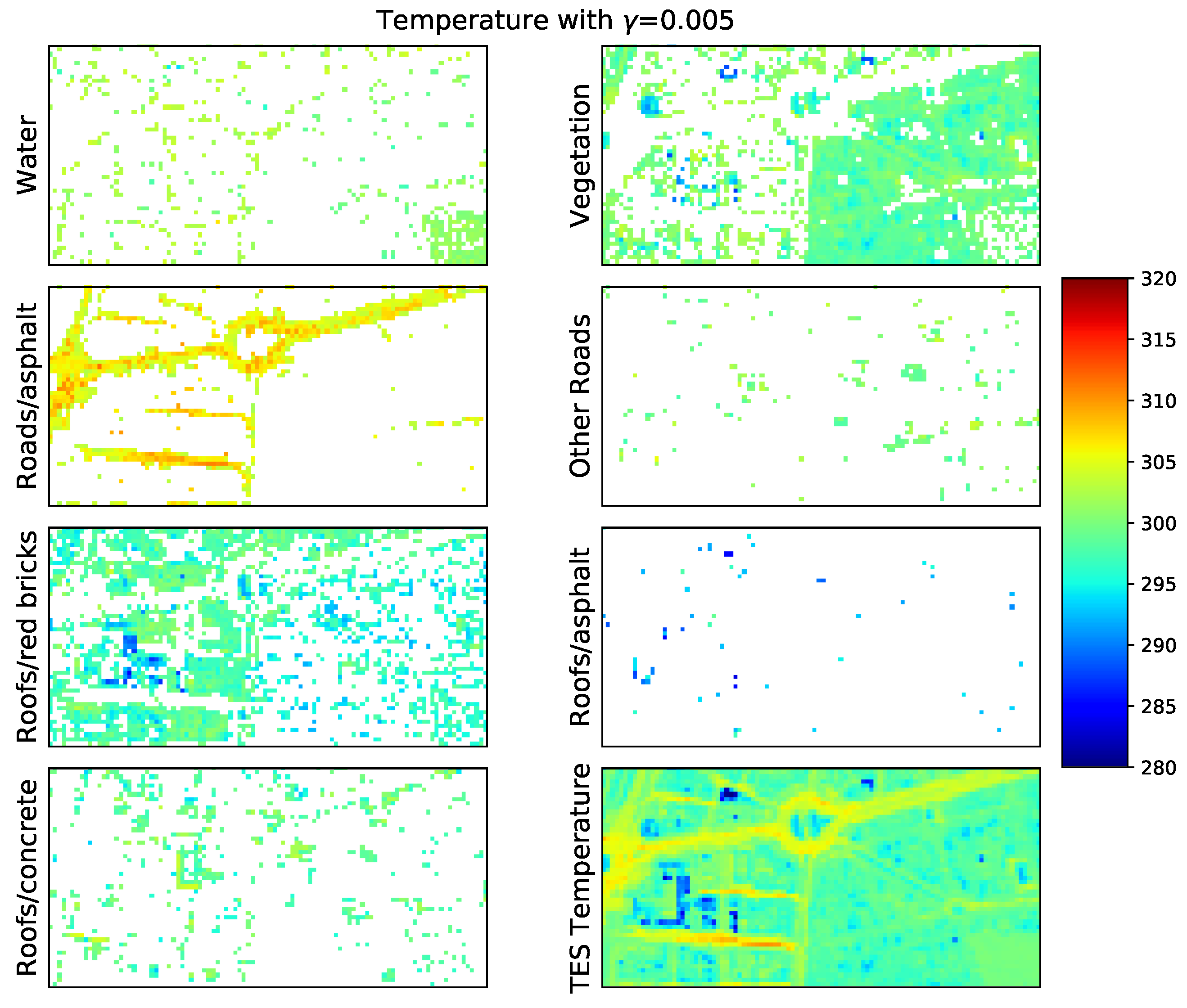
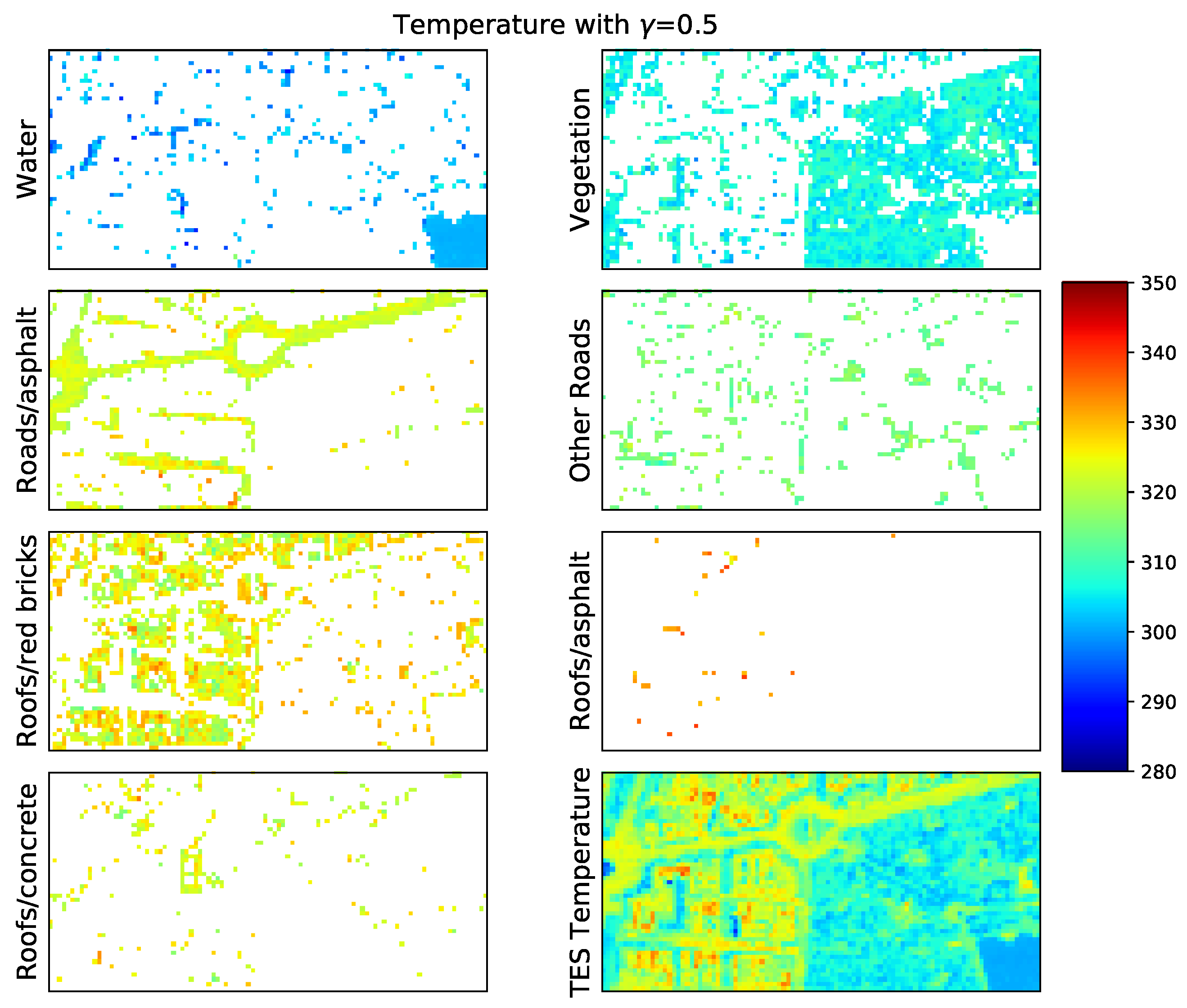
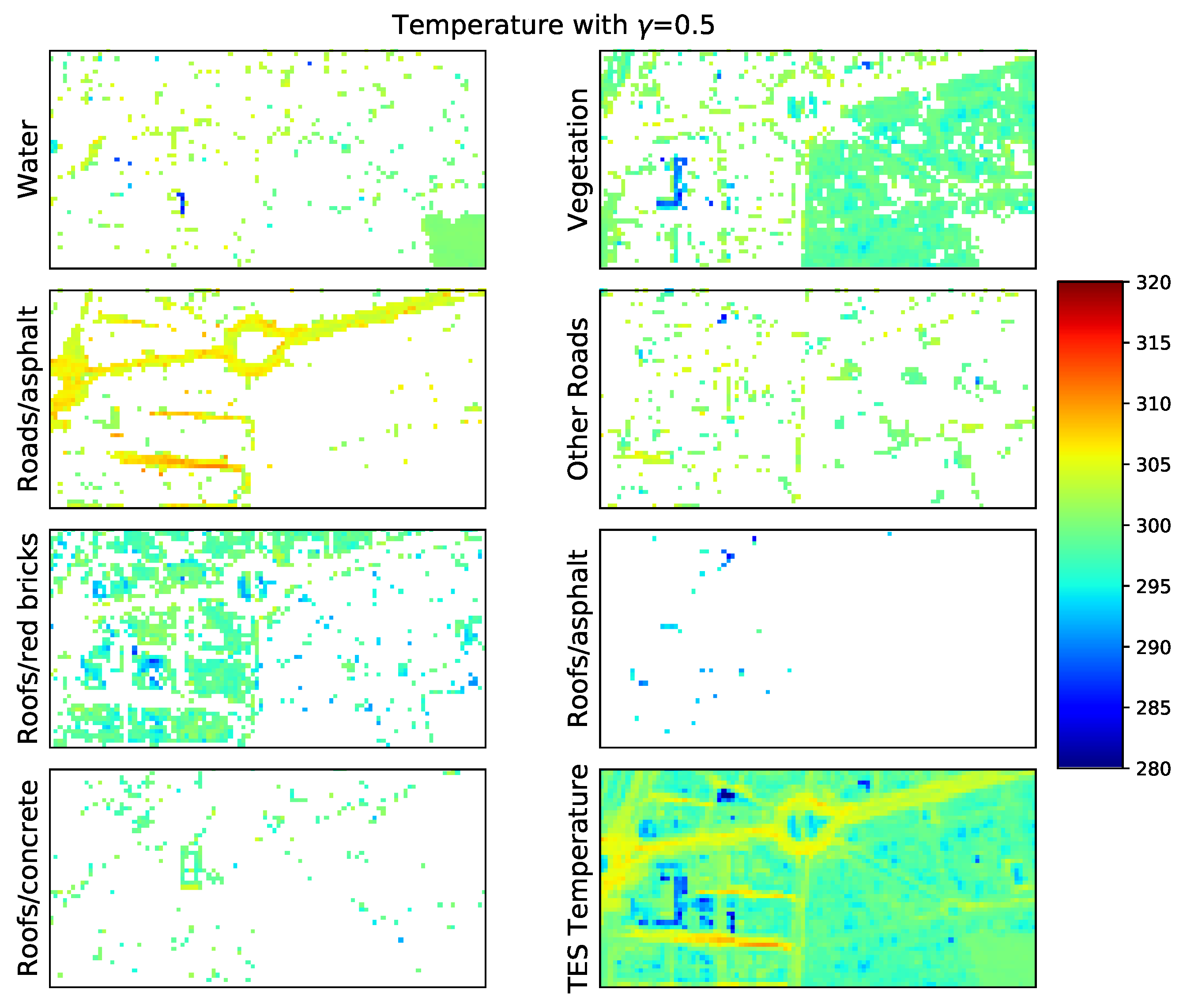
5.3. Relationship between LST and Materials
Analyzing the sign of the correlation coefficient between the abundance of a given endmember and the TES 8-m LST allows characterizing the impact of this endmember on the urban LST: negative correlations indicate that the endmember mainly cools the area, while positive correlations indicate that the endmember mainly heats the area.
Then, this study allows linking urban elements such as “roofs with red bricks”, “roofs with concrete” or “roofs with asphalt”, with high daytime temperatures and low nighttime ones, showing the low thermal inertia of these materials (see
Figure 9 and
Figure 13 for daytime analysis and
Figure 10 and
Figure 14 for nighttime analysis). Thus, the correlation coefficient between the TRUST-DNS material abundance and the TES 8-m LST for these materials during daytime is, respectively,
,
, and
, while during nighttime it is,
,
, and
. On the contrary, natural elements such as “water”, “vegetation”, and “other roads” (mainly bare soil) tend to cool the area, in particular during the day (see
Figure 9 and
Figure 13), with negative daytime and nighttime correlations coefficients of
,
, and
during daytime and
,
, and
during nighttime. The endmember “roads made of asphalt” seems to contribute to an increase of urban LSTs during both daytime and nighttime with
during daytime (see
Figure 9 and
Figure 13) and
during nighttime (see
Figure 10 and
Figure 14).
5.4. Further Studies
The thermal unmixing methodologies presented in this article have multiple applications in urban and building thermal studies as well as in urban land use/land cover studies. Thus, for example, both TRUST and TRUST-DNS allow enhancing classical classification maps done in the TIR domain since unmixing methods provide intrapixel LST and abundances. These intrapixel abundances will provide better estimations of impervious surfaces in urban environments. In the last years, the estimation of the impervious surface of cities has appeared as crucial for their correct sustainable development [
25]. Another example is the improvement of the estimation of building thermal balances [
26]. Since TRUST and TRUST-DNS provide intrapixel LSTs, they allow better delineating building borders and supplying better characterizations of building LSTs.
6. Conclusions
In this study, TRUST unmixing method was applied on DESIREX 2008 daytime and nighttime images of Madrid city center. In addition, a new version of TRUST, called TRUST-DNS for Day and Night Synergy, was developed to take advantage of available day and night images. Thus, from initial 4-m radiance images, 8-m ones were generated by aggregation. This allows using the DESIREX 2008 classification map at 4-m resolution as a reference for the abundance retrieval study. In addition, endmembers selection was based on the existing DESIREX classification, and the definition of their mean temperature and emissivity spectra was done by visually choosing 5 pixels (at 8-m resolution) per material and applying TES algorithm on these pixels. This endmembers characterization can be applied on any image without needing previous information and it was also the one chosen by Cubero-Castan et al. (2014) [
16]. It was shown that both TRUST and TRUST-DNS can be applied on eight-band airborne images of urban environments at 8-m resolution. Thus, these methods provide subpixel material abundances and temperatures which are in agreement, respectively, with the DESIREX classification and the TES temperature retrieval algorithm directly applied on 8-m radiance images. In addition, it was shown that TRUST-DNS better delineates urban objects such as streets or buildings and that their unmixed temperatures outperform those from TRUST. This can be understood since day and night synergies are exploited. Hence, this paper shows the applicability of TRUST and TRUST-DNS on a challenging study case (highly heterogeneous images at 8-m resolution with eight thermal bands), compared to those previously studied by Cubero-Castan [
10,
11,
16].
The main limitations of the proposed methodologies are: the high number of thermal bands needed (we used 8 instead of more than 30 thermal bands used in the previous works), as well as the relatively high spatial resolutions needed. This last limitation avoids the use of TRUST and TRUST-DNS on spacecraft sensors, whose spatial resolutions in the thermal domain are still, in the best case, tens of meters. Moreover, in this study, the analysis of abundance retrieval performances was limited by the rather coarse spatial resolution of the classification map used as reference, with only a factor 2 between the spatial resolutions of the processed image and the reference.
From this work, several perspectives and future research plans appear. Among them, the use of an airborne campaign with better resolution images should be envisaged to discriminate the main source of errors in the abundance retrieval performances among: (1) limited classification performances due to the presence of not considered mixed pixels at 4-m resolution; or (2) TRUST inaccuracies. Having higher than 4-m resolution initial images would allow increasing the accuracy of the classification as well as the ratio between the undersampled unmixed images and the reference. Thus, the analysis of the TRUST performances should be more precise. In addition, the main perspective of this work is the improvement of TRUST-DNS to be applied on urban environments at degraded resolutions (tens of meters). Cubero-Castan et al. (2015) [
11] showed that TRUST performances strongly decrease when three pure materials are considered in a pixel. Then, in these highly heterogeneous environments, where several pure materials (more than two) are found in pixels with sizes between 100 and 1000 m
, TRUST is expected to provide lower performances. Nevertheless, coupling day and night images may provide supplementary constraints helping to unmix with a higher number of endmembers allowed in each pixel.

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}