Combining Mechanistic Modeling and Raman Spectroscopy for Monitoring Antibody Chromatographic Purification

 ,
,  and
and
Abstract
:1. Introduction
2. Materials and Methods
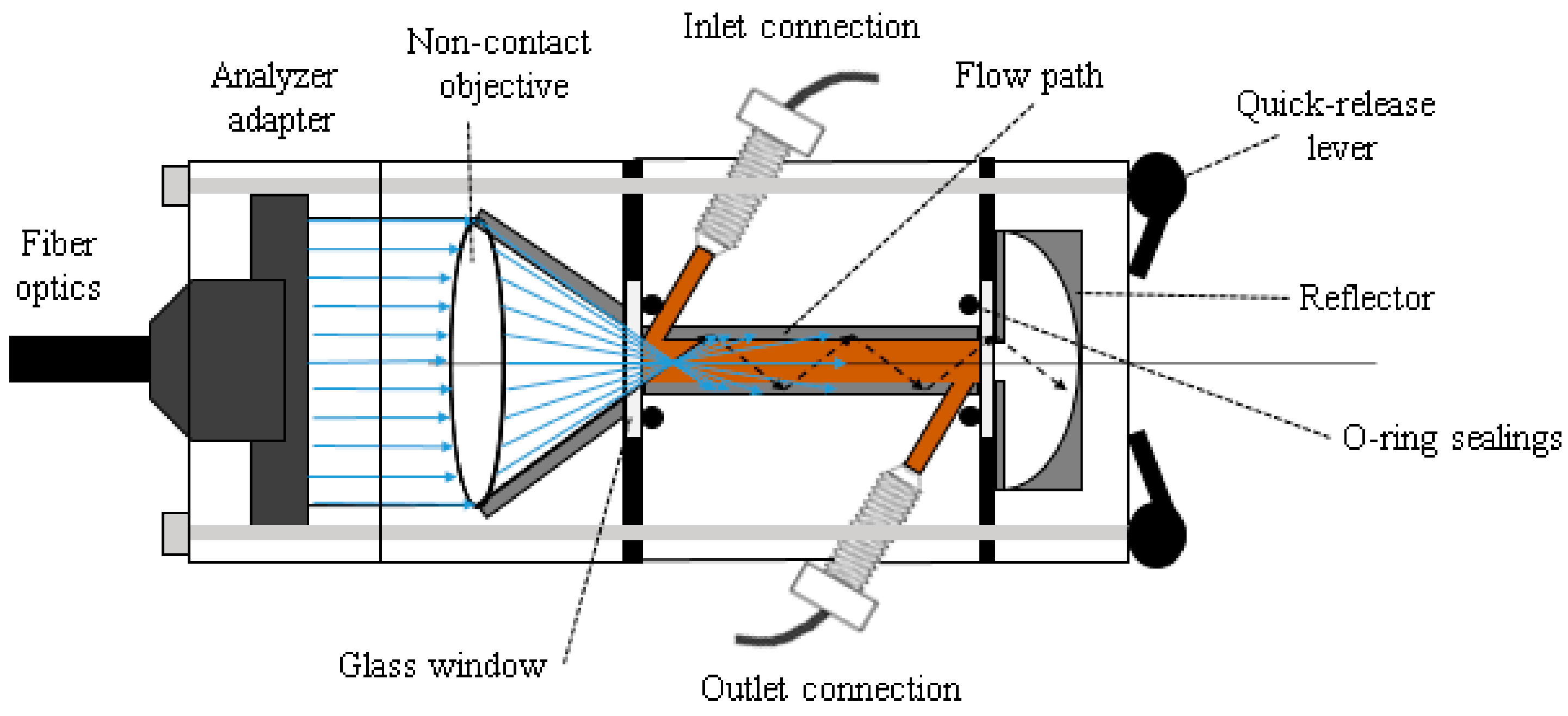
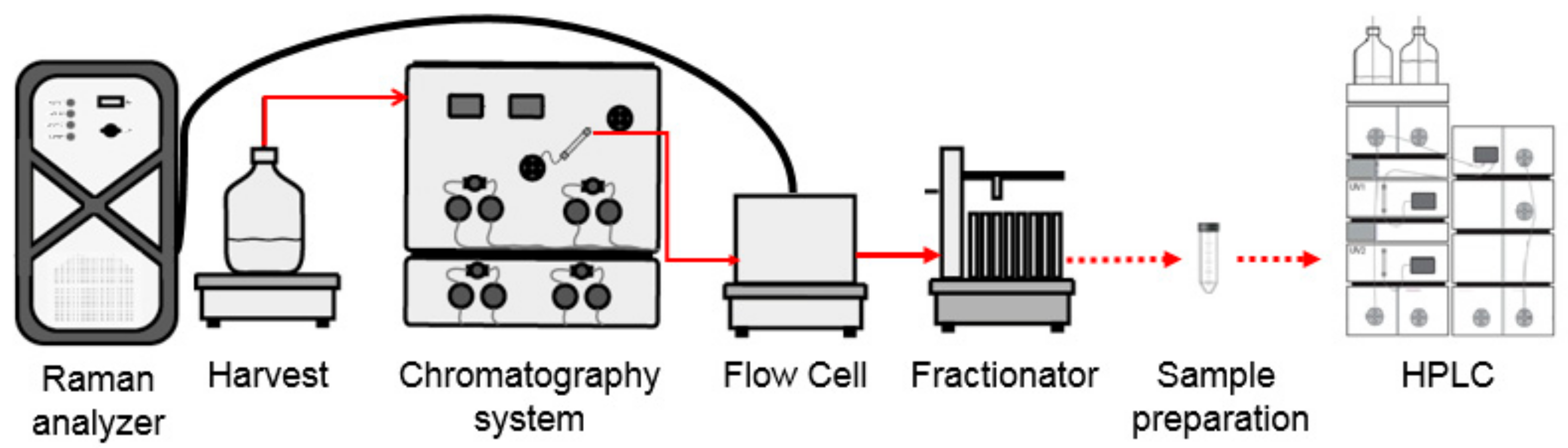
2.1. Raman Spectral Acquisition and Flow Cell
2.2. Cell Culture Supernatant
2.3. Breakthrough Runs and Reference Analytic
2.4. Chemometric Modeling Procedure
2.5. Deterministic Modeling Procedure
2.6. Extended Kalman Filter Tuning, Validation and Perturbation
3. Results and Discussion
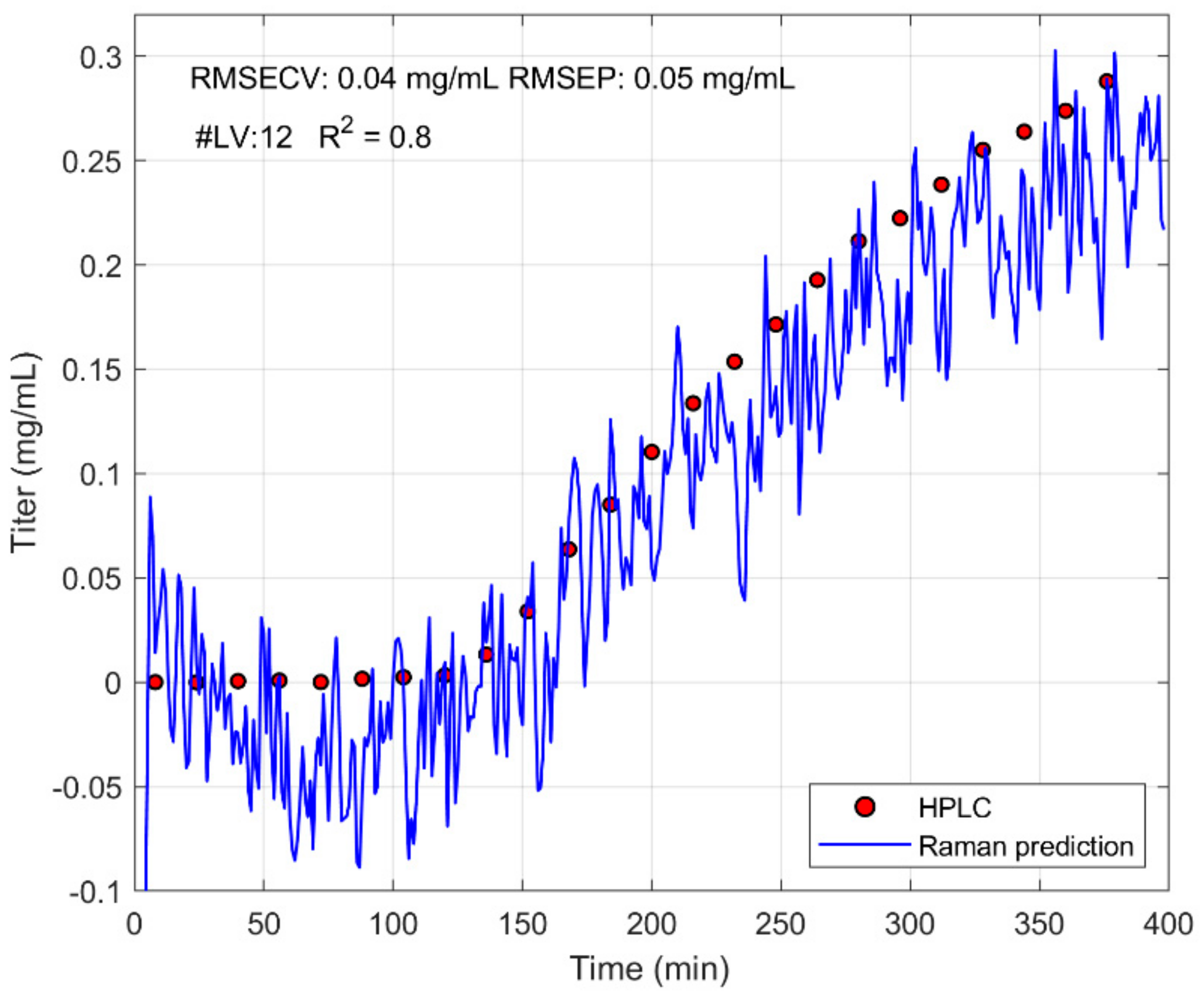
3.1. Partial Least Squares Raman Modeling
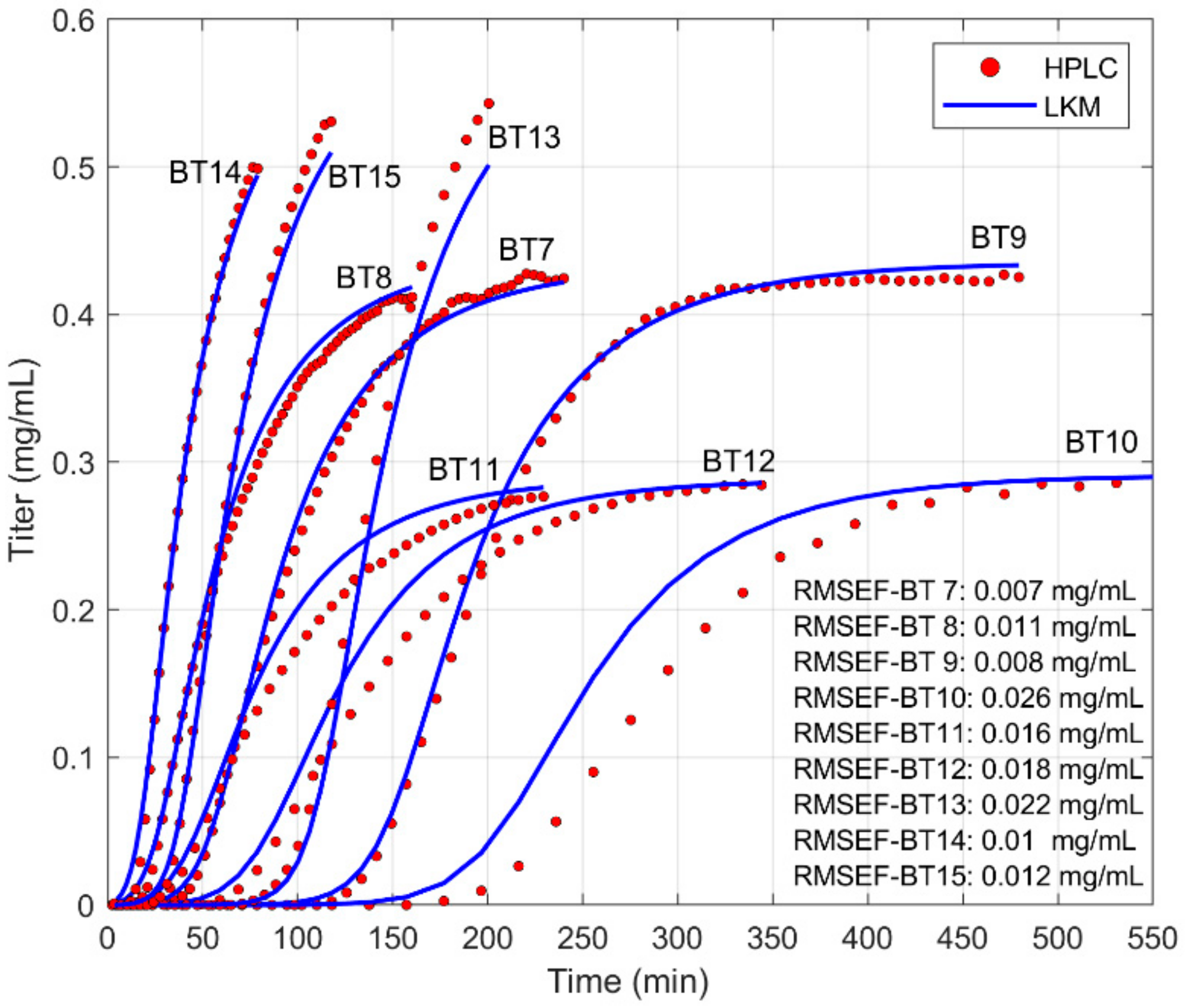
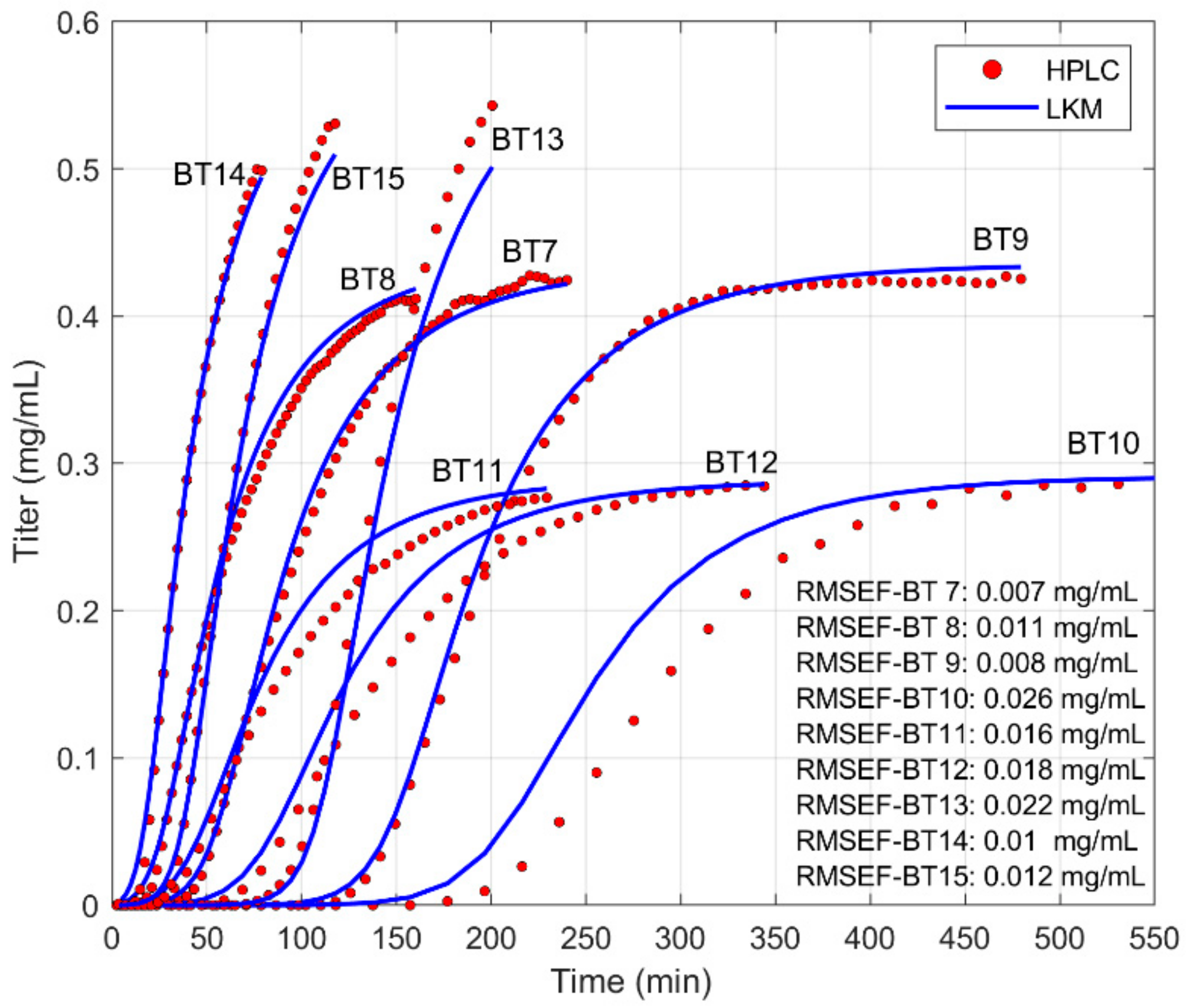
3.2. Mechanistic Modeling
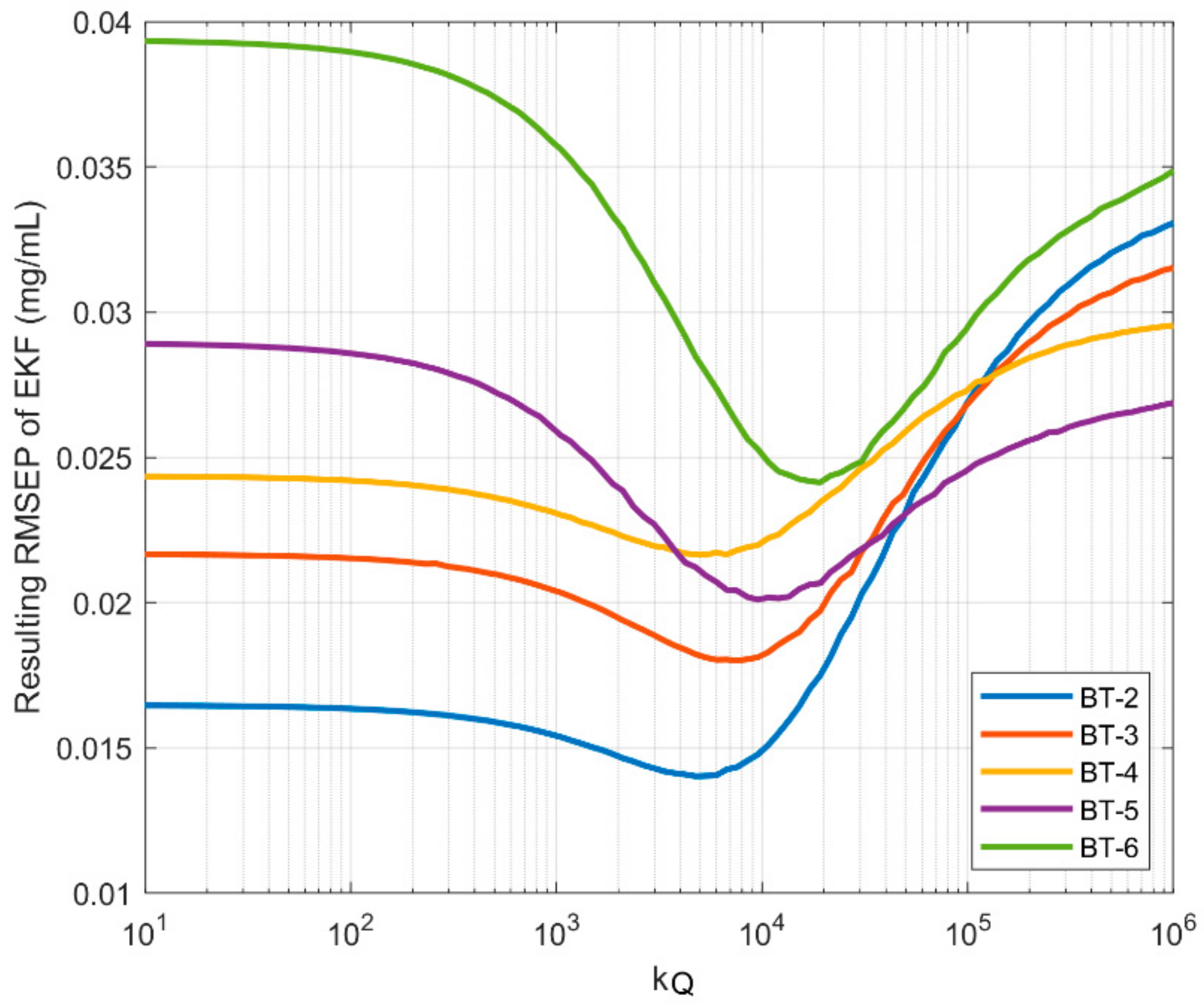
3.3. Extended Kalman Filter Tuning
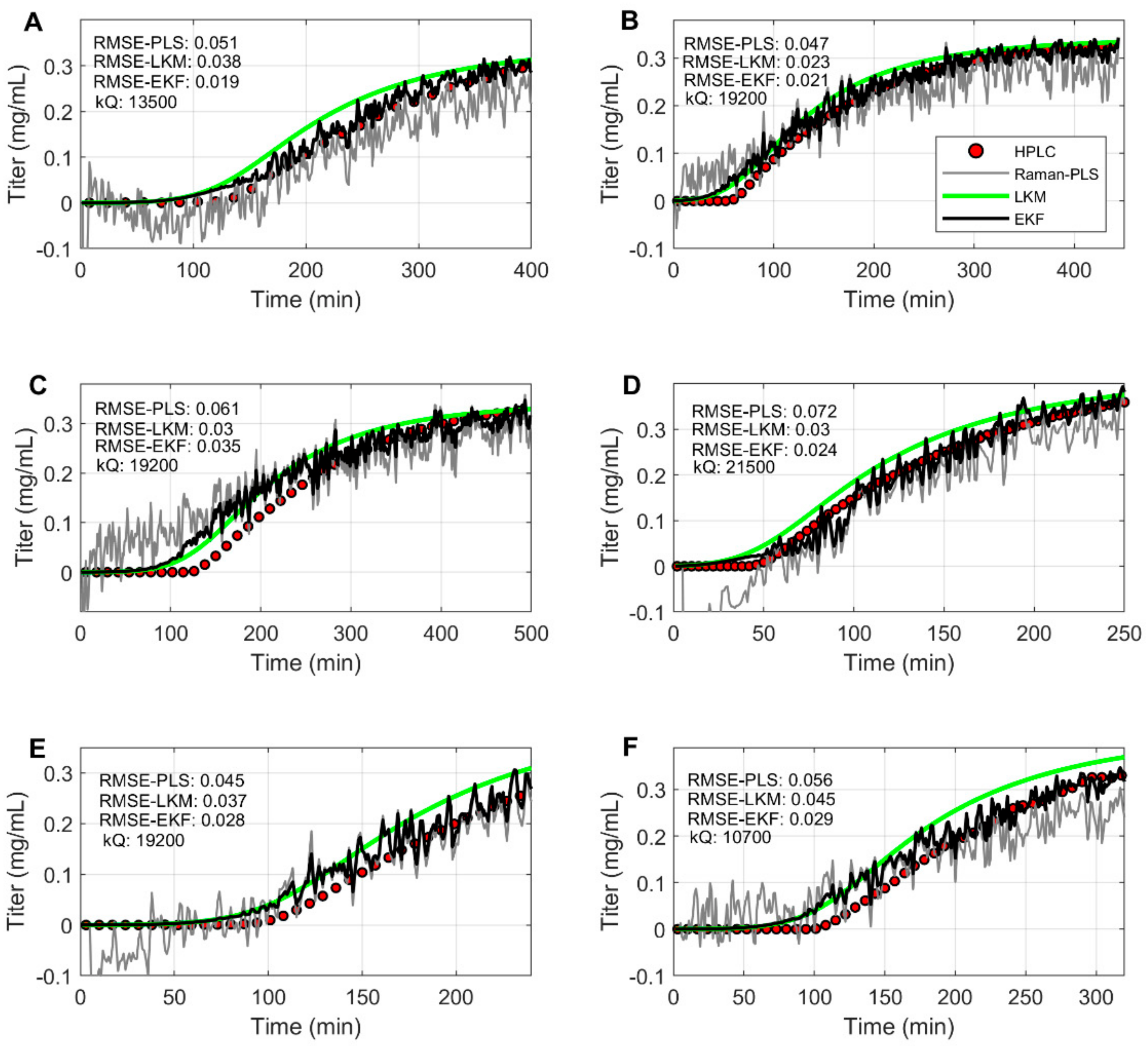
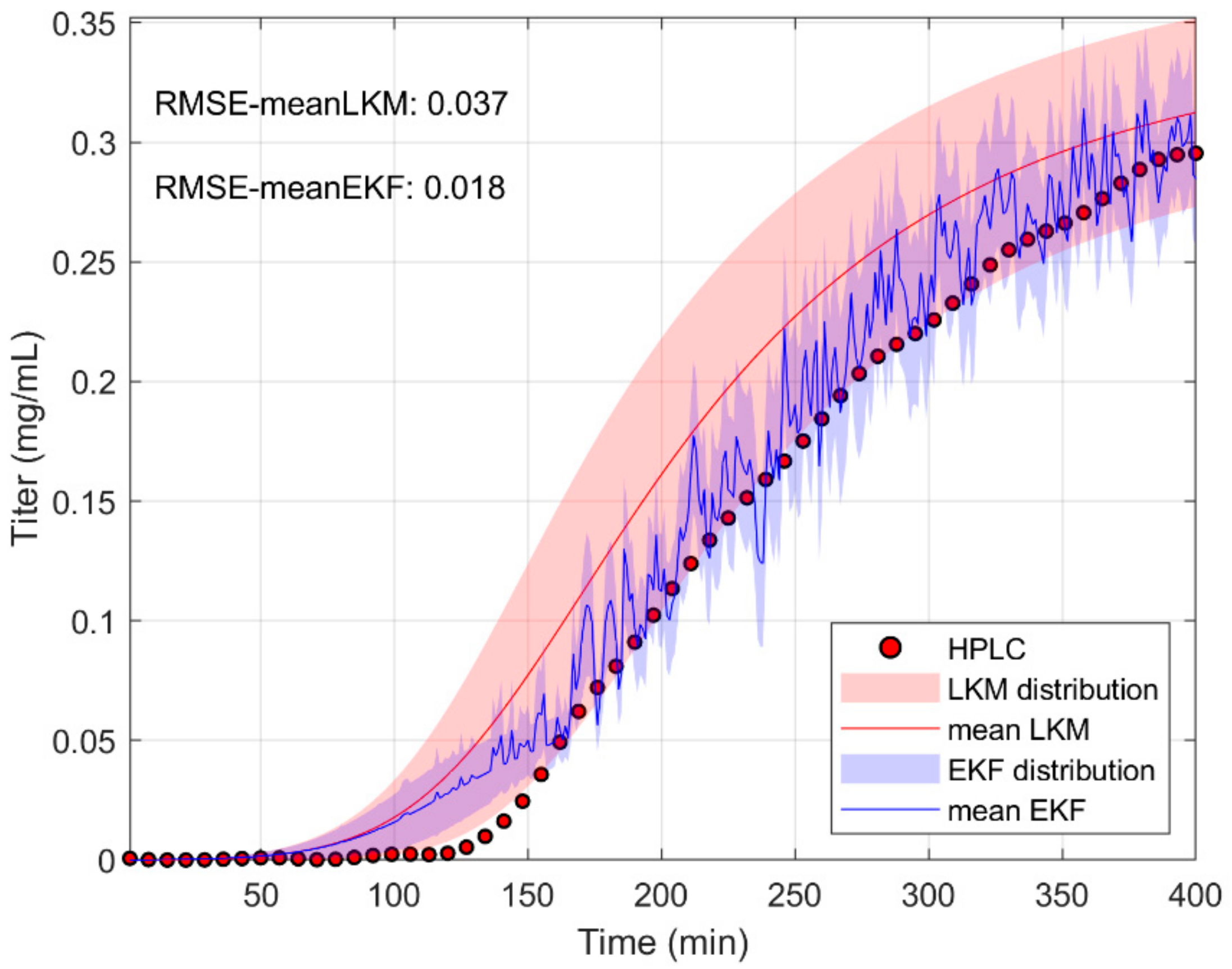
3.4. Extended Kalman Filter Validation
3.5. Extended Kalman Filter Perturbation
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Glassey, J.; Gernaey, K.V.; Clemens, C.; Schulz, T.W.; Oliveira, R.; Striedner, G.; Mandenius, C.-F. Process Analytical Technology (PAT) for Biopharmaceuticals. Biotechnol. J. 2011, 6, 369–377. [Google Scholar] [CrossRef] [PubMed]
- Rathore, A.S.; Bhambure, R.; Ghare, V. Process Analytical Technology (PAT) for Biopharmaceutical Products. Anal. Bioanal. Chem. 2010, 398, 137–154. [Google Scholar] [CrossRef] [PubMed]
- Simon, L.L.; Pataki, H.; Marosi, G.; Meemken, F.; Hungerbühler, K.; Baiker, A.; Tummala, S.; Glennon, B.; Kuentz, M.; Steele, G.; et al. Assessment of Recent Process Analytical Technology (PAT) Trends: A Multiauthor Review. Org. Process Res. Dev. 2015, 19, 3–62. [Google Scholar] [CrossRef]
- Read, E.K.; Park, J.T.; Shah, R.B.; Riley, B.S.; Brorson, K.A.; Rathore, A.S. Process Analytical Technology (PAT) for Biopharmaceutical Products: Part I. Concepts and Applications. Biotechnol. Bioeng. 2010, 105, 276–284. [Google Scholar] [CrossRef] [PubMed]
- Sommeregger, W.; Sissolak, B.; Kandra, K.; von Stosch, M.; Mayer, M.; Striedner, G. Quality by control: Towards model predictive control of mammalian cell culture bioprocesses. Biotechnol. J. 2017, 12, 1600546. [Google Scholar] [CrossRef] [PubMed]
- Rüdt, M.; Briskot, T.; Hubbuch, J. Advances in Downstream Processing of Biologics—Spectroscopy: An Emerging Process Analytical Technology. J. Chromatogr. A 2017, 1490, 2–9. [Google Scholar] [CrossRef] [PubMed]
- Santos, R.M.; Kessler, J.-M.; Salou, P.; Menezes, J.C.; Peinado, A. Monitoring MAb cultivations with in-situ raman spectroscopy: The influence of spectral selectivity on calibration models and industrial use as reliable PAT tool. Biotechnol. Prog. 2018, 34, 659–670. [Google Scholar] [CrossRef] [PubMed]
- Berry, B.; Moretto, J.; Matthews, T.; Smelko, J.; Wiltberger, K. Cross-scale predictive modeling of CHO cell culture growth and metabolites using raman spectroscopy and multivariate analysis. Biotechnol. Prog. 2015, 31, 566–577. [Google Scholar] [CrossRef]
- Craven, S.; Whelan, J.; Glennon, B. Glucose concentration control of a fed-batch mammalian cell bioprocess using a nonlinear model predictive controller. J. Process Control 2014, 24, 344–357. [Google Scholar] [CrossRef]
- Feidl, F.; Garbellini, S.; Vogg, S.; Sokolov, M.; Souquet, J.; Broly, H.; Butté, A.; Morbidelli, M. A new flow cell and chemometric protocol for implementing in-line raman spectroscopy in chromatography. Biotechnol. Prog. 2019. [Google Scholar] [CrossRef]
- Buckley, K.; Ryder, A.G. Applications of Raman spectroscopy in biopharmaceutical manufacturing: A short review. Appl. Spectrosc. 2017, 71, 1085–1116. [Google Scholar] [CrossRef] [PubMed]
- Esmonde-White, K.A.; Cuellar, M.; Uerpmann, C.; Lenain, B.; Lewis, I.R. Raman spectroscopy as a process analytical technology for pharmaceutical manufacturing and bioprocessing. Anal. Bioanal. Chem. 2017, 409, 637–649. [Google Scholar] [CrossRef] [PubMed]
- Lewis, I.R. Handbook of Raman Spectroscopy; CRC Press: Boca Raton, FL, USA, 2001. [Google Scholar] [CrossRef]
- Guiochon, G. Preparative liquid chromatography. J. Chromatogr. A 2002, 965, 129–161. [Google Scholar] [CrossRef]
- Auger, F.; Hilairet, M.; Guerrero, J.M.; Monmasson, E.; Orlowska-Kowalska, T.; Katsura, S. Industrial applications of the Kalman Filter: A Review. IEEE Trans. Ind. Electron. 2013, 60, 5458–5471. [Google Scholar] [CrossRef]
- Krämer, D.; King, R. On-line monitoring of substrates and biomass using near-infrared spectroscopy and model-based state estimation for enzyme production by S. cerevisiae. IFAC PapersOnLine 2016, 49, 609–614. [Google Scholar] [CrossRef]
- Stelzer, I.V.; Kager, J.; Herwig, C. Comparison of particle filter and extended kalman filter algorithms for monitoring of bioprocesses. In Computer Aided Chemical Engineering; Elsevier: Amsterdam, The Netherlands, 2017; Volume 40, pp. 1483–1488. [Google Scholar] [CrossRef]
- Arndt, M.; Hitzmann, B. Kalman Filter Based Glucose Control at Small Set Points during Fed-Batch Cultivation of Saccharomyces Cerevisiae. Biotechnol. Prog. 2008, 20, 377–383. [Google Scholar] [CrossRef]
- Kalman, R.E. A new approach to linear filtering and prediction problems. J. Basic Eng. 1960, 82, 35. [Google Scholar] [CrossRef]
- Faragher, R. Understanding the Basis of the Kalman Filter Via a Simple and Intuitive Derivation [Lecture Notes]. IEEE Signal Process. Mag. 2012, 29, 128–132. [Google Scholar] [CrossRef]
- Simon, D. THE H∞ FILTER. In Optimal State Estimation; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2006; pp. 331–371. [Google Scholar] [CrossRef]
- Wolf, M.K.F.; Müller, A.; Souquet, J.; Broly, H.; Morbidelli, M. Process design and development of a mammalian cell perfusion culture in shake-tube and benchtop bioreactors. Biotechnol. Bioeng. 2019, 116, 1973–1985. [Google Scholar] [CrossRef]
- Feidl, F.; Vogg, S.; Wolf, M.K.F.; Podobnik, M.; Ruggeri, C.; Ulmer, N.; Wälchli, R.; Souquet, J.; Broly, H.; Butte, A.; et al. Process-Wide Control and Automation of an Integrated Continuous Manufacturing Platform for Therapeutic Proteins. Submiss 2019. submitted for publication. [Google Scholar]
- Savitzky, A.; Golay, M.J.E. Smoothing and Differentiation of Data by Simplified Least Squares Procedures. Anal. Chem. 1964, 36, 1627–1639. [Google Scholar] [CrossRef]
- Barnes, R.J.; Dhanoa, M.S.; Lister, S.J. Standard normal variate transformation and de-trending of near-infrared diffuse reflectance spectra. Appl. Spectrosc. 1989, 43, 772–777. [Google Scholar] [CrossRef]
- Van den Berg, R.A.; Hoefsloot, H.C.; Westerhuis, J.A.; Smilde, A.K.; van der Werf, M.J. Centering, scaling, and transformations: Improving the biological information content of metabolomics data. BMC Genom. 2006, 15, 1–15. [Google Scholar] [CrossRef]
- Wold, S.; Sjöström, M.; Eriksson, L. PLS-Regression: A Basic Tool of Chemometrics. Chemom. Intell. Lab. Syst. 2001, 58, 109–130. [Google Scholar] [CrossRef]
- Kohavi, R. A study of cross-validation and bootstrap for accuracy estimation and model selection. IJCAI 1995, 14, 1137–1145. [Google Scholar]
- Baur, D.; Angarita, M.; Müller-Späth, T.; Morbidelli, M. Optimal model-based design of the twin-column capturesmb process improves capacity utilization and productivity in protein A affinity capture. Biotechnol. J. 2016, 11, 135–145. [Google Scholar] [CrossRef] [PubMed]
- Hahn, R.; Schlegel, R.; Jungbauer, A. Comparison of protein A affinity sorbents. J. Chromatogr. B 2003, 790, 35–51. [Google Scholar] [CrossRef]
- Guiochon, G.; Shirazi, D.G.; Felinger, A.; Katti, A.M. Fundamentals of Preparative and Nonlinear Chromatography; Academic Press: Cambridge, MA, USA, 2006. [Google Scholar]
- Ng, C.K.S.; Osuna-Sanchez, H.; Valéry, E.; Sørensen, E.; Bracewell, D.G. Design of high productivity antibody capture by protein A chromatography using an integrated experimental and modeling approach. J. Chromatogr. B 2012, 899, 116–126. [Google Scholar] [CrossRef] [Green Version]
- Valappil, J.; Georgakis, C. Systematic estimation of state noise statistics for extended kalman filters. AIChE J. 2000, 46, 292–308. [Google Scholar] [CrossRef]
- Schneider, R.; Georgakis, C. How to not make the extended Kalman filter fail. Ind. Eng. Chem. Res. 2013, 52, 3354–3362. [Google Scholar] [CrossRef]
- Kuo, A.D. An optimal state estimation model of sensory integration in human postural balance. J. Neural Eng. 2005, 2, S235–S249. [Google Scholar] [CrossRef] [PubMed]
- Jazwinski, A.H. Stochastic Processes and Filtering Theory; Courier Corporation: North Chelmsford, MA, USA, 2007. [Google Scholar]
- Wen, Z. Raman Spectroscopy of Protein Pharmaceuticals. J. Pharm. Sci. 2007, 96, 2861–2878. [Google Scholar] [CrossRef] [PubMed]
- Carta, G.; Jungbauer, A. Protein Chromatography; Wiley: Weinheim, Germany, 2010. [Google Scholar] [CrossRef]
- Steinebach, F.; Angarita, M.; Karst, D.J.; Müller-Späth, T.; Morbidelli, M. Model based adaptive control of a continuous capture process for monoclonal antibodies production. J. Chromatogr. A 2016, 1444, 50–56. [Google Scholar] [CrossRef] [PubMed]
- Nicoud, L.; Owczarz, M.; Arosio, P.; Morbidelli, M. A multiscale view of therapeutic protein aggregation: A colloid science perspective. Biotechnol. J. 2015, 10, 367–378. [Google Scholar] [CrossRef] [PubMed]
- Rupp, B. Predictive models for protein crystallization. Methods 2004, 34, 390–407. [Google Scholar] [CrossRef] [PubMed]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Breakthrough Curve ID | Feed Conc. (mg/mL) | Feed Flow Rate (mL/Min) | Run Duration (Min) | Fraction Duration (Min) | Raman Measurements | |
|---|---|---|---|---|---|---|
| Used for PLS and EKF | BT#1 | 0.34 | 1.0 | 200 | 8 | + |
| BT#2 | 0.34 | 1.5 | 230 | 4 | + | |
| BT#3 | 0.34 | 1.0 | 250 | 6 | + | |
| BT#4 | 0.42 | 1.5 | 130 | 2 | + | |
| BT#5 | 0.42 | 1.0 | 120 | 3.5 | + | |
| BT#6 | 0.42 | 1.0 | 170 | 3.5 | + | |
| Used for LKM fitting | BT#7 | 0.43 | 1.0 | 240 | 4 | - |
| BT#8 | 0.43 | 1.5 | 160 | 4 | - | |
| BT#9 | 0.43 | 0.5 | 480 | 4 | - | |
| BT#10 | 0.30 | 0.5 | 690 | 10 | - | |
| BT#11 | 0.30 | 1.5 | 230 | 10 | - | |
| BT#12 | 0.30 | 1.0 | 340 | 10 | - | |
| BT#13 | 0.60 | 0.5 | 200 | 3 | - | |
| BT#14 | 0.60 | 1.5 | 80 | 3.5 | - | |
| BT#15 | 0.60 | 1.0 | 120 | 3.5 | - |
| For a given Rot i |
| 1. Raman-PLS calibration: |
| ← calibrate Raman-PLS on BT#1–6 except BT#i |
| 2. Mechanistic model fitting: |
| LKM ← fit LKM on BT#7–15 with respective process inputs () |
| 3. EKF tuning: |
| ← tune EKF (Q, R, ) on BT#1–6 except BT#i |
| for n = BT#1–6 except BT#i |
| end for |
| average for all n |
| 4. EKF validation: |
| Run with inputs , |
| 5. EKF perturbation: |
| for n = 1–200 simulations |
| = random sampling of , from Gaussian probability distribution |
| Run with inputs , |
| end for |
| Calibr.set (# Obs) | Pred.set (# Obs) | Opt. num. of LV | RMSECV (mg/mL) | RMSEP (mg/mL) | R2 | |
|---|---|---|---|---|---|---|
| ROT1 | 1755 | 398 | 12 | 0.042 | 0.051 | 0.80 |
| ROT2 | 1711 | 442 | 12 | 0.042 | 0.047 | 0.86 |
| ROT3 | 1656 | 497 | 12 | 0.040 | 0.061 | 0.78 |
| ROT4 | 1906 | 247 | 12 | 0.041 | 0.072 | 0.70 |
| ROT5 | 1918 | 235 | 11 | 0.042 | 0.045 | 0.84 |
| ROT6 | 1819 | 334 | 12 | 0.041 | 0.055 | 0.82 |
| 449.3 ± 31.5 | 109.7 ± 4.7 | 8.37 × 10−4 ± 0.94 × 10−4 | 0.36 ± 0.24 | 1.76 ± 1.38 |
| ROT1 | ROT2 | ROT3 | ROT4 | ROT5 | ROT6 | |
|---|---|---|---|---|---|---|
| 1.35 × 104 | 1.92 × 104 | 1.92 × 104 | 2.15 × 104 | 1.92 × 104 | 1.07 × 104 |
| Raman-PLS RMSEP (mg/mL) | LKM RMSEP (mg/mL) | EKF RMSEP (mg/mL) | |
|---|---|---|---|
| ROT1 | 0.051 | 0.038 | 0.019 |
| ROT2 | 0.047 | 0.023 | 0.021 |
| ROT3 | 0.061 | 0.030 | 0.035 |
| ROT4 | 0.072 | 0.030 | 0.024 |
| ROT5 | 0.045 | 0.037 | 0.028 |
| ROT6 | 0.055 | 0.045 | 0.029 |
| Mean: | 0.055 | 0.034 | 0.026 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Feidl, F.; Garbellini, S.; Luna, M.F.; Vogg, S.; Souquet, J.; Broly, H.; Morbidelli, M.; Butté, A. Combining Mechanistic Modeling and Raman Spectroscopy for Monitoring Antibody Chromatographic Purification. Processes 2019, 7, 683. https://doi.org/10.3390/pr7100683
Feidl F, Garbellini S, Luna MF, Vogg S, Souquet J, Broly H, Morbidelli M, Butté A. Combining Mechanistic Modeling and Raman Spectroscopy for Monitoring Antibody Chromatographic Purification. Processes. 2019; 7(10):683. https://doi.org/10.3390/pr7100683
Chicago/Turabian StyleFeidl, Fabian, Simone Garbellini, Martin F. Luna, Sebastian Vogg, Jonathan Souquet, Hervé Broly, Massimo Morbidelli, and Alessandro Butté. 2019. "Combining Mechanistic Modeling and Raman Spectroscopy for Monitoring Antibody Chromatographic Purification" Processes 7, no. 10: 683. https://doi.org/10.3390/pr7100683