
Fabrication of a 3D Nanomagnetic Circuit with Multi-Layered Materials for Applications in Spintronics

 , ,
, ,  , ,
, , {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
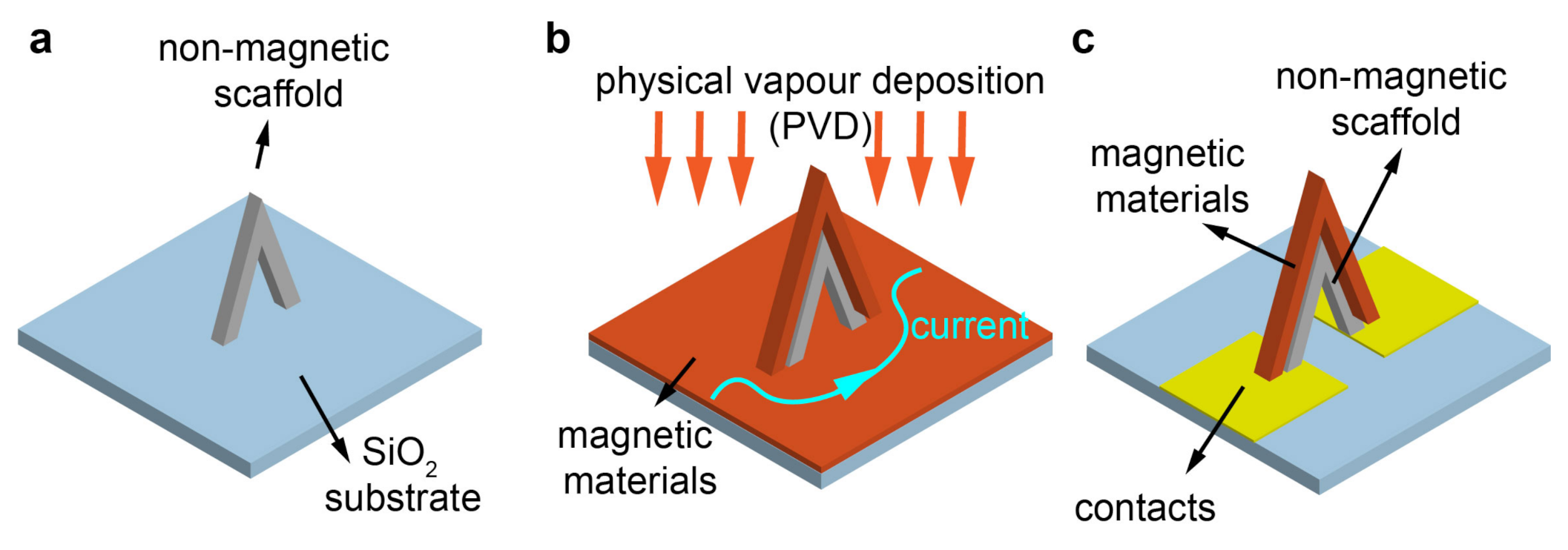
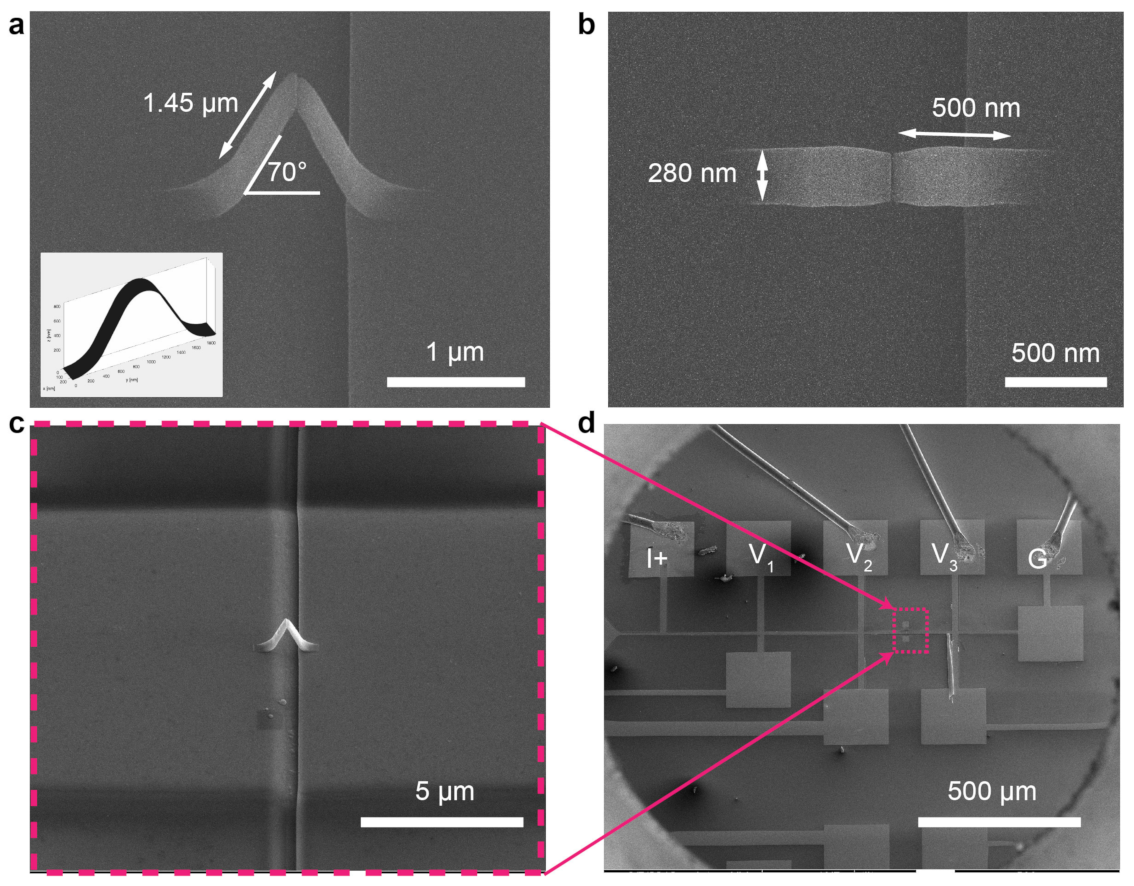
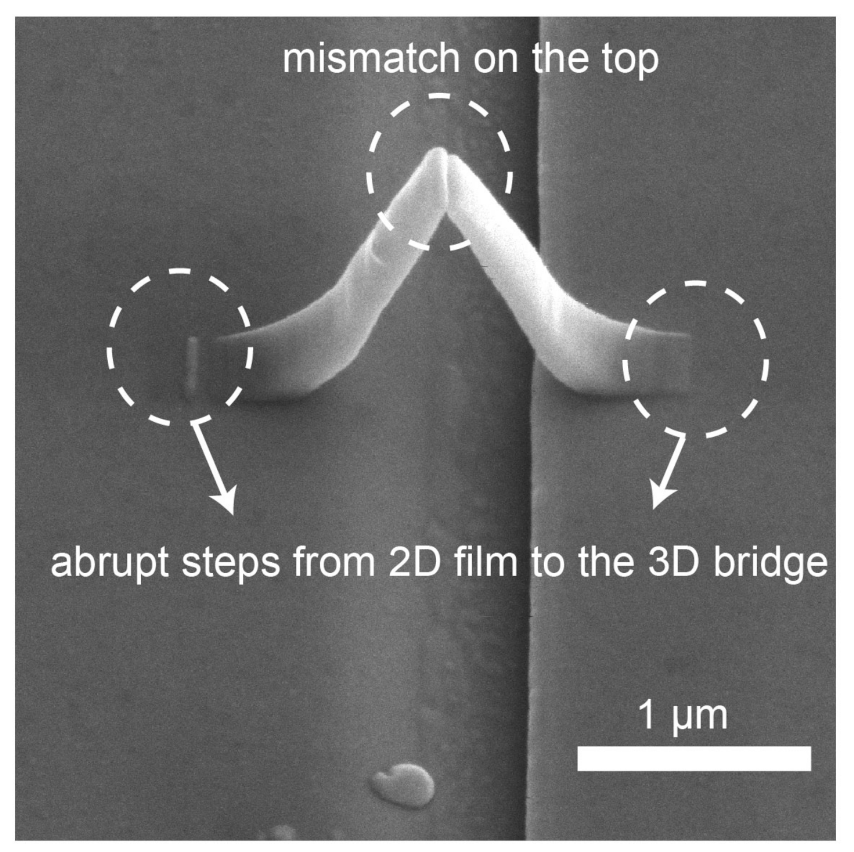
2.1. Fabrication of a 3D Nanomagnetic Circuit Using FEBID and PVD
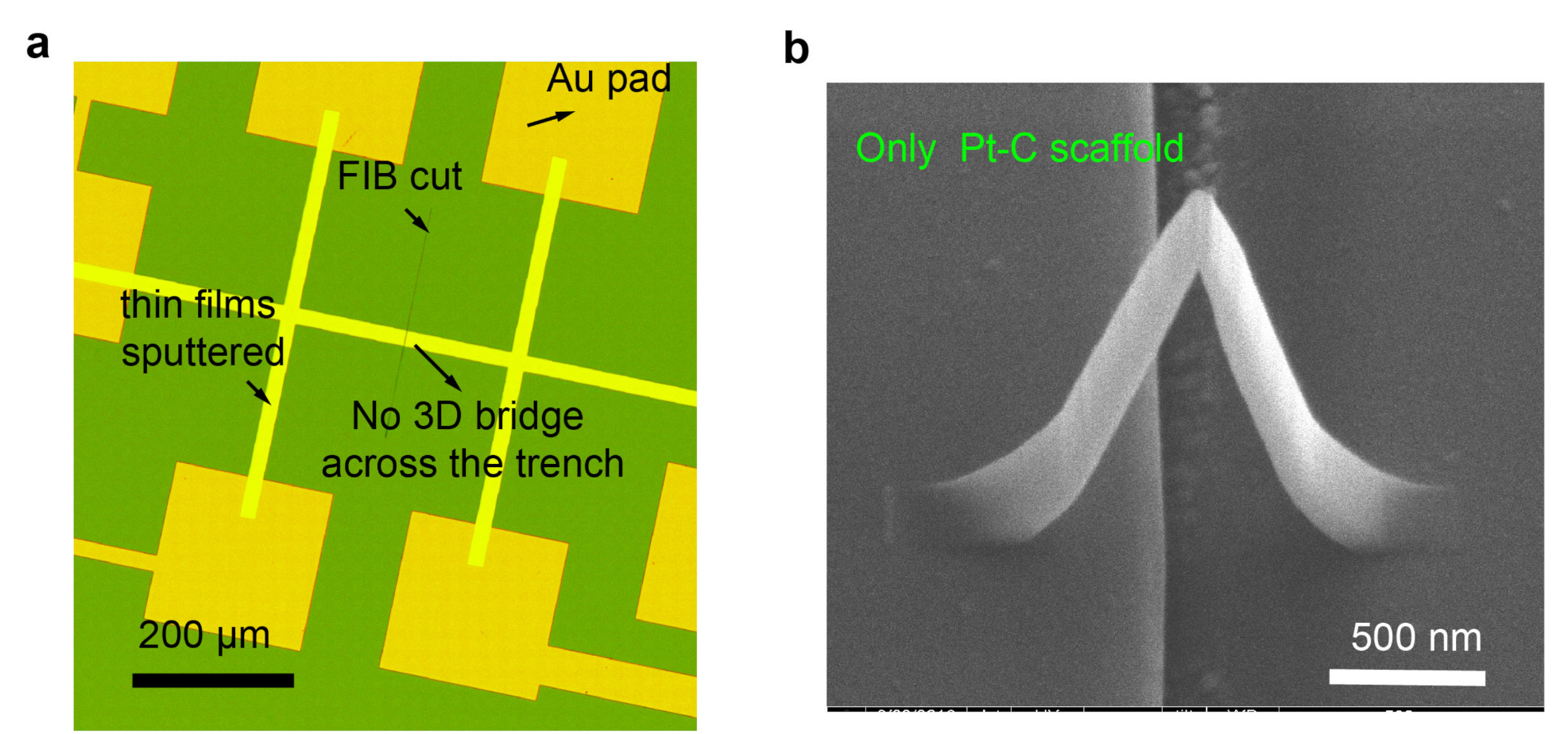
2.2. Electrical Insulation Verification of the FIB Milled Trench and the ‘Non-Conducting’ 3D Scaffold
3. Results
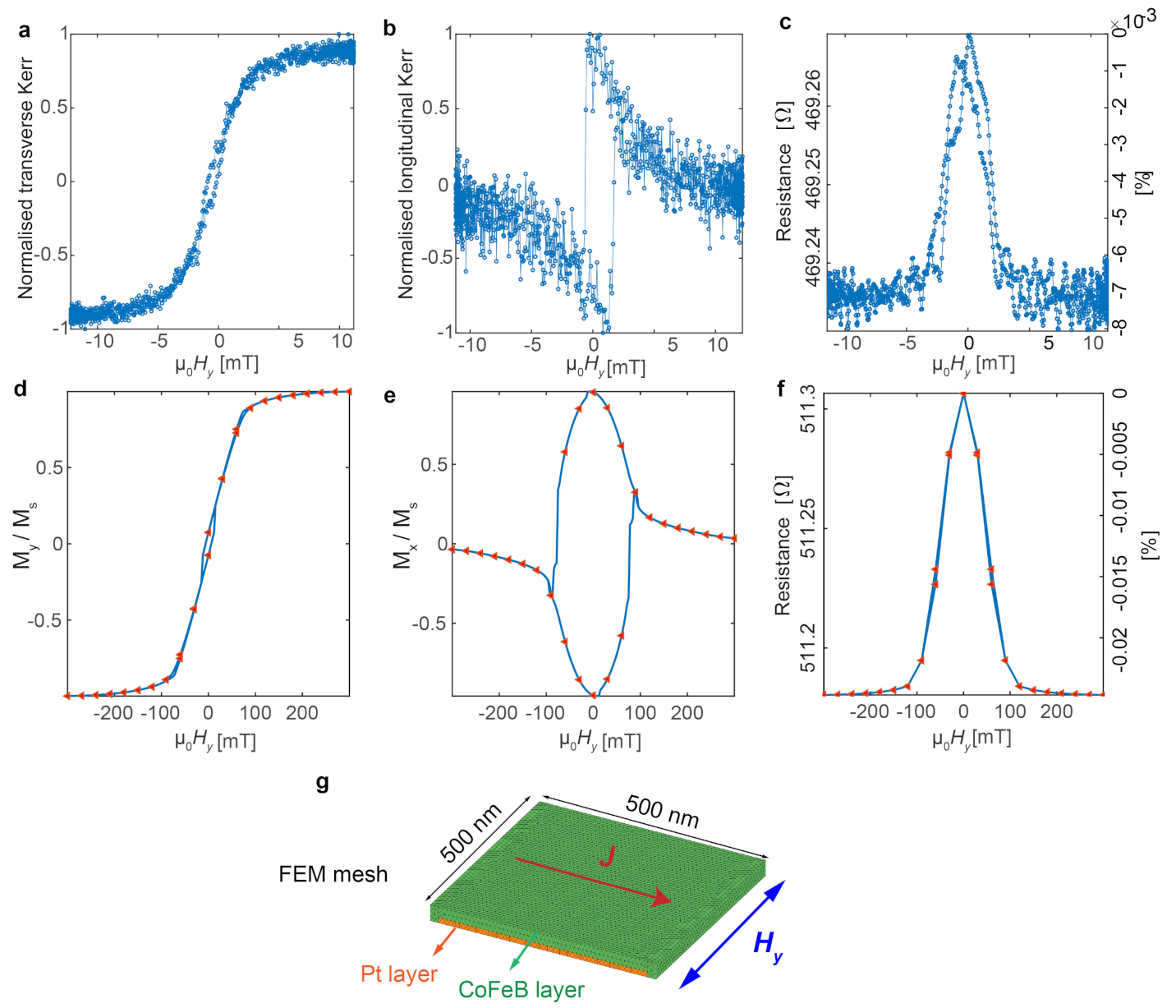
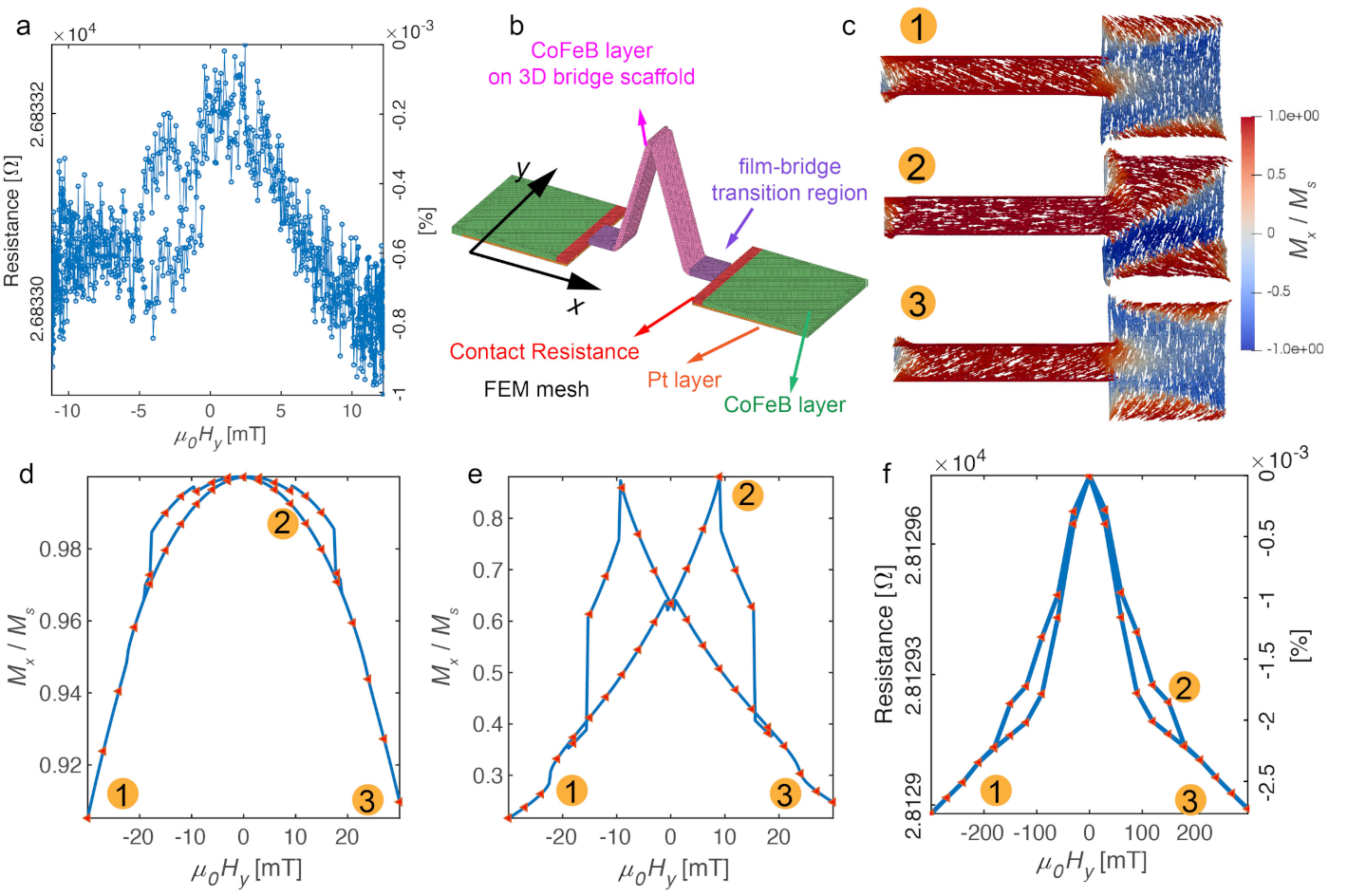
3.1. 2D Track Section: MOKE and Magnetotransport Results and Simulations
3.2. 3D Bridge Section: Magnetotransport Results and Simulations
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| 2D | Two dimensional |
| 3D | Three dimensional |
| GMR | Giant Magnetoresistance |
| TMR | Tunnelling Magnetoresistance |
| PMA | Perpendicular Magnetic Anisotropy |
| DMI | Dzyaloshinskii–Moriya Interaction |
| RKKY | Ruderman–Kittel–Kasuya–Yosida Interaction |
| CMOS | Complementary Metal-Oxide-Semiconductor |
| FEBID | Focused Electron Beam Induced Deposition |
| PVD | Physical Vapor Deposition |
| UHV | Ultra High Vacuum |
| CAD | Computer Aided Design |
| DC | Direct Current |
| FIB | Focused Ion Beam |
| SEM | Scanning Electron Microscopy |
| MOKE | Magneto-Optic Kerr Effect |
| MT | Magneto-Transport |
| AMR | Anisotropic Magnetoresistance |
| FEM | Finite Element Method |
Appendix A. More Details about the Fabrication Process
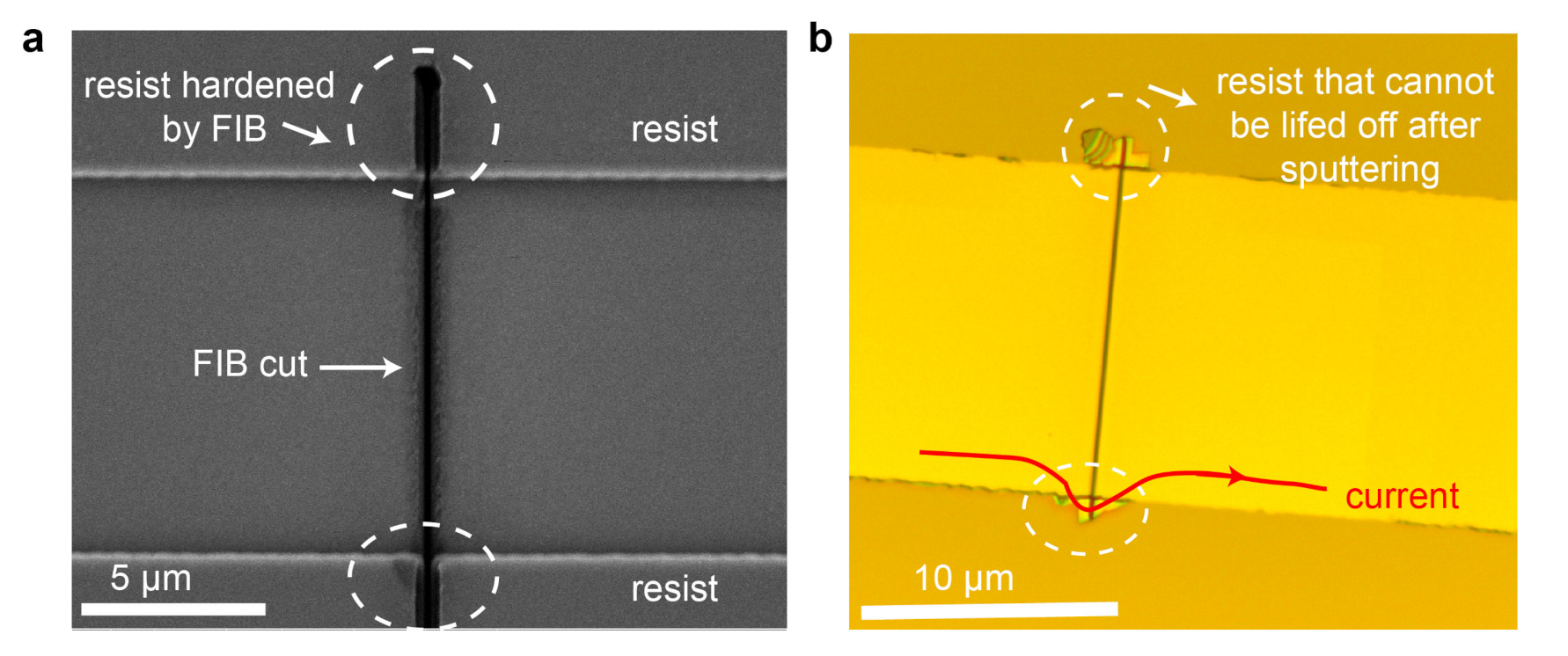
Appendix A.1. The Consequence of Performing FIB Milling after Having Resist

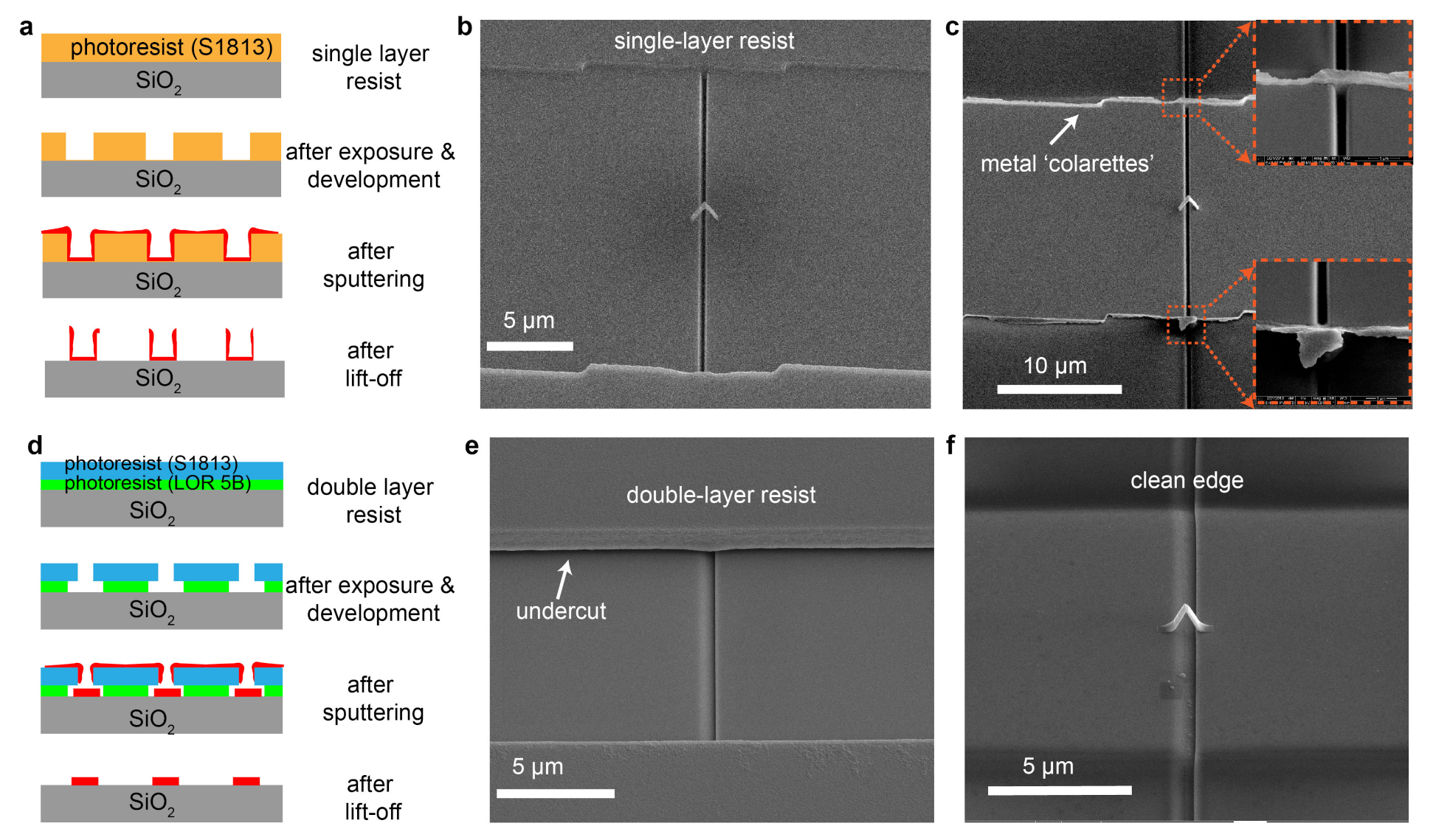
Appendix A.2. The Comparison between Using Single or Double Layered Resist

Appendix B. Electrical Insulation Verification of the Trench and Pt-C Scaffold

Appendix C. FEM Simulation of AMR
References
- Dieny, B.; Prejbeanu, I.L.; Garello, K.; Gambardella, P.; Freitas, P.; Lehndorff, R.; Raberg, W.; Ebels, U.; Demokritov, S.O.; Akerman, J.; et al. Opportunities and challenges for spintronics in the microelectronics industry. Nat. Electron. 2020, 3, 446–459. [Google Scholar] [CrossRef]
- Hirohata, A.; Yamada, K.; Nakatani, Y.; Prejbeanu, L.; Diény, B.; Pirro, P.; Hillebrands, B. Review on spintronics: Principles and device applications. J. Magn. Magn. Mater. 2020, 509, 166711. [Google Scholar] [CrossRef]
- Hellman, F.; Hoffmann, A.; Tserkovnyak, Y.; Beach, G.S.D.; Fullerton, E.E.; Leighton, C.; MacDonald, A.H.; Ralph, D.C.; Arena, D.A.; Dürr, H.A.; et al. Interface-induced phenomena in magnetism. Rev. Mod. Phys. 2017, 89, 025006. [Google Scholar] [CrossRef]
- Vedmedenko, E.Y.; Kawakami, R.K.; Sheka, D.D.; Gambardella, P.; Kirilyuk, A.; Hirohata, A.; Binek, C.; Chubykalo-Fesenko, O.; Sanvito, S.; Kirby, B.J.; et al. The 2020 magnetism roadmap. J. Phys. D Appl. Phys. 2020, 53, 453001. [Google Scholar] [CrossRef]
- Fischer, P.; Sanz-Hernández, D.; Streubel, R.; Fernández-Pacheco, A. Launching a new dimension with 3D magnetic nanostructures. APL Mater. 2020, 8, 010701. [Google Scholar] [CrossRef] [Green Version]
- Fernández-Pacheco, A.; Streubel, R.; Fruchart, O.; Hertel, R.; Fischer, P.; Cowburn, R.P. Three-dimensional nanomagnetism. Nat. Commun. 2017, 8, 15756. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Parkin, S.S.P.; Hayashi, M.; Thomas, L. Magnetic Domain-Wall Racetrack Memory. Science 2008, 320, 190–194. [Google Scholar] [CrossRef] [PubMed]
- Burks, E.C.; Gilbert, D.A.; Murray, P.D.; Flores, C.; Felter, T.E.; Charnvanichborikarn, S.; Kucheyev, S.O.; Colvin, J.D.; Yin, G.; Liu, K. 3D Nanomagnetism in Low Density Interconnected Nanowire Networks. Nano Lett. 2020, 21, 716–722. [Google Scholar] [CrossRef] [PubMed]
- Torrejon, J.; Riou, M.; Araujo, F.A.; Tsunegi, S.; Khalsa, G.; Querlioz, D.; Bortolotti, P.; Cros, V.; Yakushiji, K.; Fukushima, A.; et al. Neuromorphic computing with nanoscale spintronic oscillators. Nature 2017, 547, 428–431. [Google Scholar] [CrossRef]
- May, A.; Hunt, M.; Berg, A.V.D.; Hejazi, A.; Ladak, S. Realisation of a frustrated 3D magnetic nanowire lattice. Commun. Phys. 2019, 2, 13. [Google Scholar] [CrossRef] [Green Version]
- Col, S.D.; Jamet, S.; Rougemaille, N.; Locatelli, A.; Mentes, T.O.; Burgos, B.S.; Afid, R.; Darques, M.; Cagnon, L.; Toussaint, J.C.; et al. Observation of Bloch-point domain walls in cylindrical magnetic nanowires. Phys. Rev. B 2014, 89, 180405. [Google Scholar] [CrossRef] [Green Version]
- Maurenbrecher, H.; Mendil, J.; Chatzipirpiridis, G.; Mattmann, M.; Pané, S.; Nelson, B.J.; Gambardella, P. Chiral anisotropic magnetoresistance of ferromagnetic helices. Appl. Phys. Lett. 2018, 112, 242401. [Google Scholar] [CrossRef] [Green Version]
- Volkov, O.M.; Kákay, A.; Kronast, F.; Mönch, I.; Mawass, M.A.; Fassbender, J.; Makarov, D. Experimental Observation of Exchange-Driven Chiral Effects in Curvilinear Magnetism. Phys. Rev. Lett. 2019, 123, 077201. [Google Scholar] [CrossRef] [PubMed]
- Schöbitz, M.; Riz, A.D.; Martin, S.; Bochmann, S.; Thirion, C.; Vogel, J.; Foerster, M.; Aballe, L.; Menteş, T.O.; Locatelli, A.; et al. Fast Domain Wall Motion Governed by Topology and Œrsted Fields in Cylindrical Magnetic Nanowires. Phys. Rev. Lett. 2019, 123, 217201. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ross, C.A.; Berggren, K.K.; Cheng, J.Y.; Jung, Y.S.; Chang, J. Three-Dimensional Nanofabrication by Block Copolymer Self-Assembly. Adv. Mater. 2014, 26, 4386–4396. [Google Scholar] [CrossRef]
- Llandro, J.; Love, D.M.; Kovács, A.; Caron, J.; Vyas, K.N.; Kákay, A.; Salikhov, R.; Lenz, K.; Fassbender, J.; Scherer, M.R.J.; et al. Visualizing Magnetic Structure in 3D Nanoscale Ni–Fe Gyroid Networks. Nano Lett. 2020, 20, 3642–3650. [Google Scholar] [CrossRef] [PubMed]
- Fernández-Pacheco, A.; Skoric, L.; Teresa, J.M.D.; Pablo-Navarro, J.; Huth, M.; Dobrovolskiy, O.V. Writing 3D Nanomagnets Using Focused Electron Beams. Materials 2020, 13, 3774. [Google Scholar] [CrossRef] [PubMed]
- Skoric, L.; Sanz-Hernández, D.; Meng, F.; Donnelly, C.; Merino-Aceituno, S.; Fernández-Pacheco, A. Layer-by-Layer Growth of Complex-Shaped Three-Dimensional Nanostructures with Focused Electron Beams. Nano Lett. 2019, 20, 184–191. [Google Scholar] [CrossRef] [PubMed]
- Fernández-Pacheco, A.; Teresa, J.M.D.; Córdoba, R.; Ibarra, M.R. Magnetotransport properties of high-quality cobalt nanowires grown by focused-electron-beam-induced deposition. J. Phys. D Appl. Phys. 2009, 42, 055005. [Google Scholar] [CrossRef] [Green Version]
- Córdoba, R.; Lavrijsen, R.; Fernández-Pacheco, A.; Ibarra, M.R.; Schoenaker, F.; Ellis, T.; Barcones-Campo, B.; Kohlhepp, J.T.; Swagten, H.J.M.; Koopmans, B.; et al. Giant anomalous Hall effect in Fe-based microwires grown by focused-electron-beam-induced deposition. J. Phys. D Appl. Phys. 2012, 45. [Google Scholar] [CrossRef]
- Teresa, J.M.D.; Fernández-Pacheco, A.; Córdoba, R.; Serrano-Ramón, L.; Sangiao, S.; Ibarra, M.R. Review of magnetic nanostructures grown by focused electron beam induced deposition (FEBID). J. Phys. D Appl. Phys. 2016, 49, 243003. [Google Scholar] [CrossRef]
- Sanz-Hernández, D.; Hierro-Rodriguez, A.; Donnelly, C.; Pablo-Navarro, J.; Sorrentino, A.; Pereiro, E.; Magén, C.; McVitie, S.; Teresa, J.M.d.; Ferrer, S.; et al. Artificial Double-Helix for Geometrical Control of Magnetic Chirality. ACS Nano 2020, 14, 8084–8092. [Google Scholar] [CrossRef] [PubMed]
- Donnelly, C.; Guizar-Sicairos, M.; Scagnoli, V.; Holler, M.; Huthwelker, T.; Menzel, A.; Vartiainen, I.; Müller, E.; Kirk, E.; Gliga, S.; et al. Element-Specific X-Ray Phase Tomography of 3D Structures at the Nanoscale. Phys. Rev. Lett. 2015, 114, 115501. [Google Scholar] [CrossRef]
- Albrecht, M.; Hu, G.; Guhr, I.L.; Ulbrich, T.C.; Boneberg, J.; Leiderer, P.; Schatz, G. Magnetic multilayers on nanospheres. Nat. Mater. 2005, 4, 203–206. [Google Scholar] [CrossRef]
- Sanz-Hernández, D.; Hamans, R.F.; Liao, J.W.; Welbourne, A.; Lavrijsen, R.; Fernández-Pacheco, A. Fabrication, Detection, and Operation of a Three-Dimensional Nanomagnetic Conduit. ACS Nano 2017, 11, 11066–11073. [Google Scholar] [CrossRef]
- Piraux, L.; Renard, K.; Guillemet, R.; Mátéfi-Tempfli, S.; Mátéfi-Tempfli, M.; Antohe, V.A.; Fusil, S.; Bouzehouane, K.; Cros, V. Template-Grown NiFe/Cu/NiFe Nanowires for Spin Transfer Devices. Nano Lett. 2007, 7, 2563–2567. [Google Scholar] [CrossRef]
- Huang, X.; Tan, L.; Cho, H.; Stadler, B.J.H. Magnetoresistance and spin transfer torque in electrodeposited Co/Cu multilayered nanowire arrays with small diameters. J. Appl. Phys. 2009, 105, 07D128. [Google Scholar] [CrossRef]
- Marchal, N.; Gomes, T.d.C.S.C.; Araujo, F.A.; Piraux, L. Giant Magnetoresistance and Magneto-Thermopower in 3D Interconnected NixFe1−x/Cu Multilayered Nanowire Networks. Nanomaterials 2021, 11, 1133. [Google Scholar] [CrossRef] [PubMed]
- Meng, F.; Donnelly, C.; Abert, C.; Skoric, L.; Holmes, S.; Xiao, Z.; Liao, J.W.; Newton, P.J.; Barnes, C.H.W.; Sanz-Hernández, D.; et al. Non-Planar Geometrical Effects on the Magnetoelectrical Signal in a Three-Dimensional Nanomagnetic Circuit. ACS Nano 2021, 15, 6765–6773. [Google Scholar] [CrossRef] [PubMed]
- Eichwald, I.; Breitkreutz, S.; Ziemys, G.; Csaba, G.; Porod, W.; Becherer, M. Majority logic gate for 3D magnetic computing. Nanotechnology 2014, 25, 335202. [Google Scholar] [CrossRef] [PubMed]
- Iihama, S.; Mizukami, S.; Naganuma, H.; Oogane, M.; Ando, Y.; Miyazaki, T. Gilbert damping constants of Ta/CoFeB/MgO(Ta) thin films measured by optical detection of precessional magnetization dynamics. Phys. Rev. B 2014, 89, 174416. [Google Scholar] [CrossRef]
- Ikeda, S.; Miura, K.; Yamamoto, H.; Mizunuma, K.; Gan, H.D.; Endo, M.; Kanai, S.; Hayakawa, J.; Matsukura, F.; Ohno, H. A perpendicular-anisotropy CoFeB–MgO magnetic tunnel junction. Nat. Mater. 2010, 9, 721–724. [Google Scholar] [CrossRef] [PubMed]
- Aziz, A.; Bending, S.J.; Roberts, H.; Crampin, S.; Heard, P.J.; Marrows, C.H. Artificial domain structures realized by local gallium focused Ion-beam modification of Pt/Co/Pt trilayer transport structure. J. Appl. Phys. 2005, 98, 124102. [Google Scholar] [CrossRef]
- Fowlkes, J.D.; Winkler, R.; Lewis, B.B.; Fernández-Pacheco, A.; Skoric, L.; Sanz-Hernández, D.; Stanford, M.G.; Mutunga, E.; Rack, P.D.; Plank, H. High-Fidelity 3D-Nanoprinting via Focused Electron Beams: Computer-Aided Design (3BID). ACS Appl. Nano Mater. 2018, 1, 1028–1041. [Google Scholar] [CrossRef]
- Fernández-Pacheco, A.; Teresa, J.M.D.; Córdoba, R.; Ibarra, M.R. Metal-insulator transition in Pt-C nanowires grown by focused-ion-beam-induced deposition. Phys. Rev. B 2009, 79, 174204. [Google Scholar] [CrossRef]
- Campbell, I.; Fert, A. Handbook of Ferromagnetic Materials; Springer Science & Business Media: Berlin, Germany, 1982; Volume 3, pp. 747–804. [Google Scholar] [CrossRef]
- Teixeira, J.; Silva, R.A.; Ventura, J.; Pereira, A.; Carpinteiro, F.; Araújo, J.; Sousa, J.; Cardoso, S.; Ferreira, R.; Freitas, P. Domain imaging, MOKE and magnetoresistance studies of CoFeB films for MRAM applications. Mater. Sci. Eng. B 2006, 126, 180–186. [Google Scholar] [CrossRef] [Green Version]
- Qiao, X.; Wang, B.; Tang, Z.; Shen, Y.; Yang, H.; Wang, J.; Zhan, Q.; Mao, S.; Xu, X.; Li, R.W. Tuning magnetic anisotropy of amorphous CoFeB film by depositing on convex flexible substrates. AIP Adv. 2016, 6, 056106. [Google Scholar] [CrossRef] [Green Version]
- Agustsson, J.S.; Arnalds, U.B.; Ingason, A.S.; Gylfason, K.B.; Johnsen, K.; Olafsson, S.; Gudmundsson, J.T. Electrical resistivity and morphology of ultra thin Pt films grown by dc magnetron sputtering on SiO2. J. Phys. Conf. Ser. 2008, 100, 082006. [Google Scholar] [CrossRef]
- Kläui, M.; Vaz, C.A.F.; Bland, J.A.C.; Wernsdorfer, W.; Faini, G.; Cambril, E. Domain wall pinning and controlled magnetic switching in narrow ferromagnetic ring structures with notches (invited). J. Appl. Phys. 2003, 93, 7885–7890. [Google Scholar] [CrossRef]
- Sanz-Hernández, D.; Hamans, R.F.; Osterrieth, J.; Liao, J.W.; Skoric, L.; Fowlkes, J.D.; Rack, P.D.; Lippert, A.; Lee, S.F.; Lavrijsen, R.; et al. Fabrication of Scaffold-Based 3D Magnetic Nanowires for Domain Wall Applications. Nanomaterials 2018, 8, 483. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Tretiakov, O.A.; Morini, M.; Vasylkevych, S.; Slastikov, V. Engineering Curvature-Induced Anisotropy in Thin Ferromagnetic Films. Phys. Rev. Lett. 2017, 119, 077203. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Sun, X.; Huang, J.; Jian, J.; Fan, M.; Wang, H.; Li, Q.; Manus-Driscoll, J.L.M.; Lu, P.; Zhang, X.; Wang, H. Three-dimensional strain engineering in epitaxial vertically aligned nanocomposite thin films with tunable magnetotransport properties. Mater. Horizons 2018, 5, 536–544. [Google Scholar] [CrossRef] [Green Version]
- Wasa, K.; Matsushima, T. Handbook of Sputtering Technology, 2nd ed.; Part III: Sputtering Technology for Nanomaterials and Thin Film MEMS; William Andrew: Bethesda, MD, USA, 2012; pp. 597–622. [Google Scholar] [CrossRef]
- Sidhwa, A.; Spinner, C.; Gandy, T.; Goulding, M.; Brown, W.; Naseem, H.; Ulrich, R.; Ang, S.; Charlton, S.; Prasad, V.; et al. Study of the step coverage and contact resistance by using two-step TiN barrier and evolve simulation. IEEE Trans. Semicond. Manuf. 2005, 18, 163–173. [Google Scholar] [CrossRef]








Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Meng, F.; Donnelly, C.; Skoric, L.; Hierro-Rodriguez, A.; Liao, J.-w.; Fernández-Pacheco, A. Fabrication of a 3D Nanomagnetic Circuit with Multi-Layered Materials for Applications in Spintronics. Micromachines 2021, 12, 859. https://doi.org/10.3390/mi12080859
Meng F, Donnelly C, Skoric L, Hierro-Rodriguez A, Liao J-w, Fernández-Pacheco A. Fabrication of a 3D Nanomagnetic Circuit with Multi-Layered Materials for Applications in Spintronics. Micromachines. 2021; 12(8):859. https://doi.org/10.3390/mi12080859
Chicago/Turabian StyleMeng, Fanfan, Claire Donnelly, Luka Skoric, Aurelio Hierro-Rodriguez, Jung-wei Liao, and Amalio Fernández-Pacheco. 2021. "Fabrication of a 3D Nanomagnetic Circuit with Multi-Layered Materials for Applications in Spintronics" Micromachines 12, no. 8: 859. https://doi.org/10.3390/mi12080859