1. Introduction
Electric vehicles (EVs) or hybrid electric vehicles (HEVs), which use lithium-ion batteries (LIBs) as their main energy source, are being widely adopted as a transportation innovation. During use, however, the batteries degrade, losing some of their capacity as they undergo charge and discharge cycles and eventually they will suddenly stop functioning. Therefore, top concerns for EVs are limited the battery life and potential battery failure on the road while in use, as observed in a study by the US-based Consumer Electronics Association (CEA) [
1]. In order to prevent on-road failure and ensure safe and reliable operation, a battery management system (BMS) must provide functions to monitor the batteries’ state of health (SOH) and predict the remaining life, thermal management, safety protection, charge control, cell balancing, and so on. While BMS technology in small-scale portable electronics such as cellular phones is relatively mature, it is not yet fully developed for EVs or HEVs due to the fact that the power and number of cells needed are hundreds of times greater due to the critical need to monitor the batteries’ SOH [
2].
The SOH represents the real-time physical condition of the battery and is usually defined by capacity fade, which typically occurs as the battery ages due to electrode degradation. The most influential factors for this degradation are temperature, charge/discharge rate, and depth of discharge. Considerable effort has been directed at developing a method for estimating the SOH [
3,
4,
5,
6]. The conventional approach has been to employ empirical models that make use of an equivalent circuit model (ECM) to mimic the battery dynamics. Electrochemical impedance spectroscopy (EIS) or direct current internal resistance (DCIR) tests have been widely used as a non-invasive method to estimate the changes in the internal parameters, which are the capacitance and resistance of the equivalent circuit. The estimated parameters are then correlated with the actual capacity and used as the indicator of capacity fade. The EIS measurement, however, is costly and not available aboard a vehicle. Moreover, the ECM does not provide insight into the physical and chemical phenomena driving the voltage dynamics of the cell, unless great care is taken to associate the parameters with specific electrochemical processes.
A more advanced SOH estimation approach that has recently gained attention is the use of a physics-based electrochemical model that solves coupled nonlinear partial differential equations (PDEs) in spatiotemporal coordinates that are related to the conservation of mass and charge in the solid and liquid phases [
7,
8,
9]. Because the parameters used in this model have a physical interpretation, they are directly correlated with battery aging. The parameters can be estimated using battery-state data provided by the BMS,
i.e., the current, voltage, and temperature during the charge/discharge process. This approach has two advantages: (1) it does not require any extra means or interruption of the BMS, which enables online applications, and more importantly, (2) it provides a more accurate assessment of capacity fade than the ECM in view of diverse loading conditions from slow to rapid charging. Once capacity fade has been detected, it can be used to determine which cell, if any, of the battery pack needs to be replaced.
In parameter estimation, actual online measurements suffer from various uncertainties associated with the inaccuracy of battery-state data, inherent material variances, and harsh operating/environmental conditions. Due to the inability to account for these uncertainties, results obtained by deterministic optimization may give questionable results with regard to SOH estimation. In order to provide more reliable management, uncertainty should be incorporated into SOH monitoring by using probabilistic methods, which estimate parameters based on real-time battery-state data. The lower bound then can be estimated for the faded capacity under a given level of confidence. There have been numerous efforts in this direction, which addresses the uncertainty issue for SOH estimation in the recent years [
3,
4,
10,
11,
12]. In the literature, most of the works were however based on the data driven approach and/or the empirical model which does not account for the physics associated with the degradation, hence, can be less insightful than the physics-based estimation. Only a few studies have been made in physics-based SOH estimation with uncertainty. Tong
et al. [
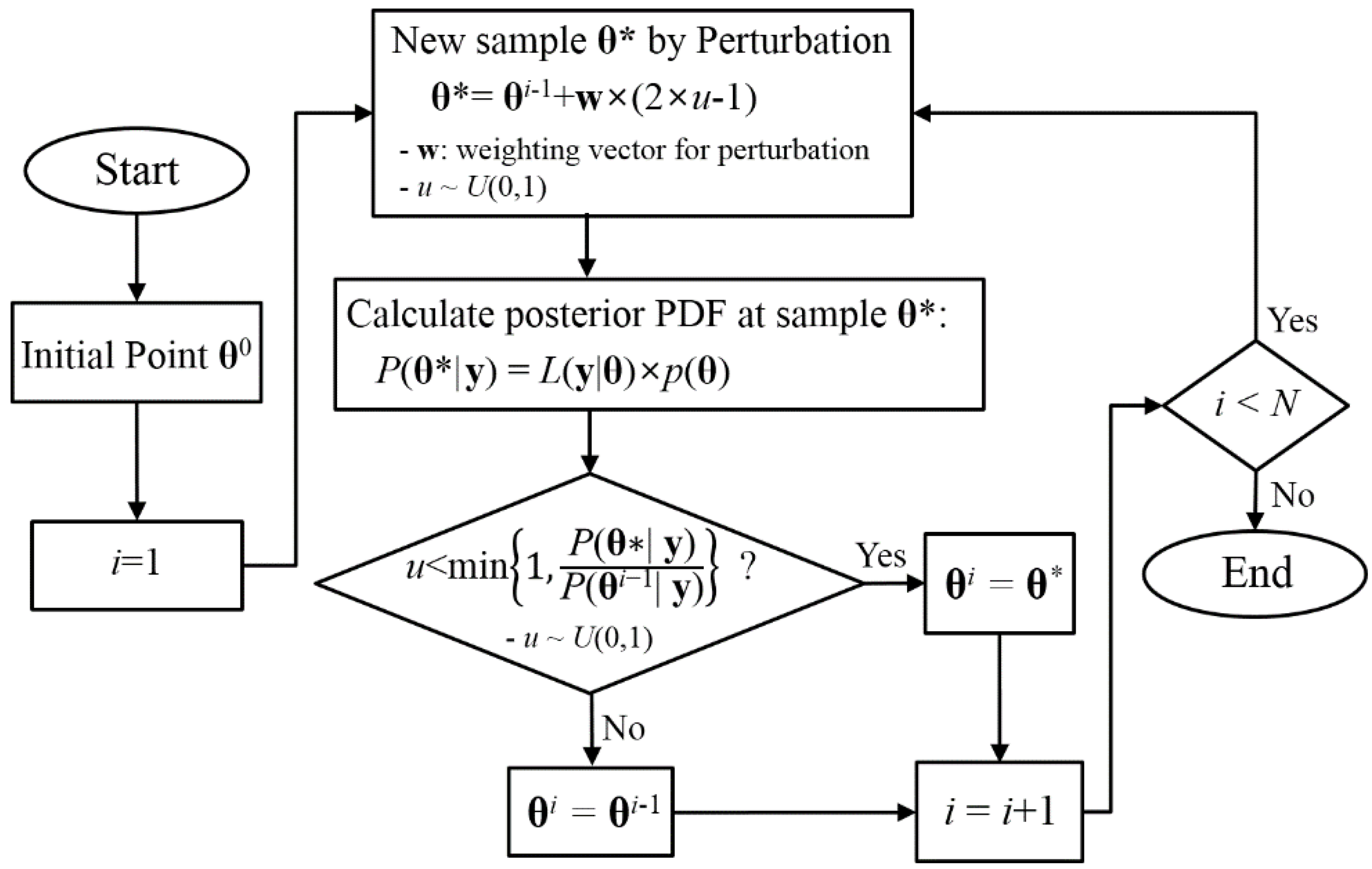
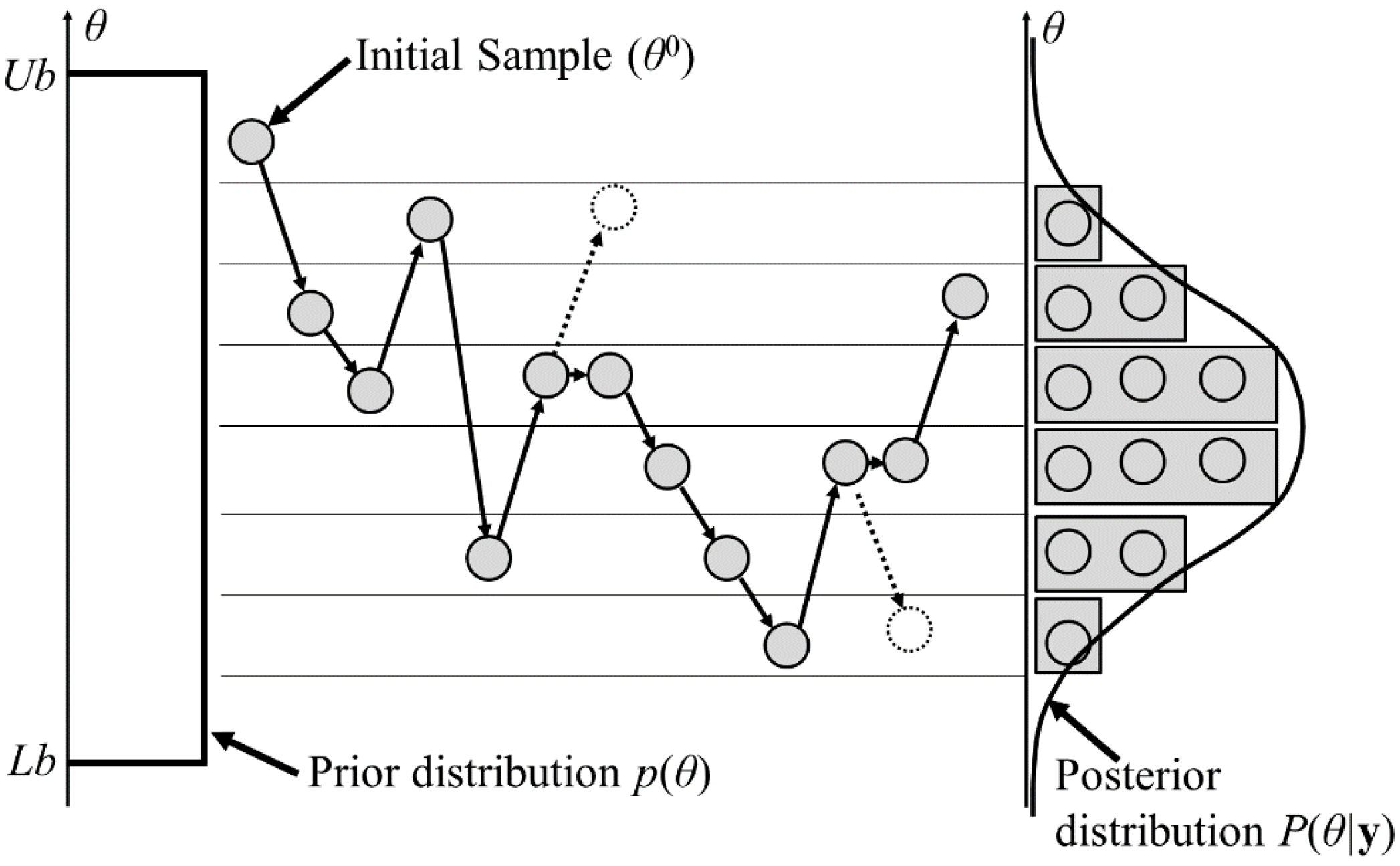
13] carried out a Markov Chain Monte Carlo (MCMC) simulation by generating samples that satisfied the probability distributions and then running a simulation for each sample to capture the probabilistic nature of parameter uncertainties. However, the parameter estimation was not conditional on battery-state data. In Ramadesigan
et al. [
14], the effective parameters and their uncertainties were estimated in the form of samples based on battery data, using the Bayesian approach and a mathematical reformulation of a porous electrode model. In their study, however, the computation cost to simulate the model with such large samples is not clearly stated; it is likely very high, which may limit its applicability to the on-board vehicle BMS.
Therefore, the purpose of this paper is to propose an efficient method to estimate battery capacity fade, including uncertainty factors. This method could then be easily integrated into the vehicle BMS. The pseudo-two dimensional (P2D) electrochemical model is employed, which simulates the battery state under the profile of the input current by solving a system of coupled nonlinear partial differential equations (PDEs). The reliability of this electrochemical model has been validated by experiments in which the simulated and measured voltage curves were compared under various charge and discharge conditions [
15]. Rather than using data at discharge cycles, which usually undergo arbitrary conditions, this study uses the data at charge cycles, which tend to occur under a constant C-rate. By comparing the simulated and experimental voltage curves, the model parameters representing degradation are estimated by way of large samples to reflect their probabilistic nature.
In order to incorporate the uncertainties in the capacity fade estimation, probabilistic approach is needed, from which the confidence bounds can be determined. In that case, the results are given by the probability distributions instead of a deterministic value. In the practical implementation, a large number of samples (at least 5000) are necessary to represent the distributions, which means that the P2D model should be solved that number of times. Even though a single computation to solve a P2D model only takes a few seconds, it can take several hours to implement the whole number of P2D solutions, which is intractable from a practical viewpoint. Thus, a polynomial-based metamodel is developed to replace P2D electrochemical model. The output variable of the metamodel is the voltage at discrete time steps, and the input variables are the physical parameters such as diffusion coefficients and reaction constants. For the additional alleviation of the computational burden, only one dominant variable is selected as the input variable of the metamodel, and the operating current condition is fixed as the charging cycle with constant C-rate. Note that the computational environment of vehicle BMS is extremely limited. Once the dominant parameter is estimated using the polynomial metamodel, a conservative capacity fade boundary can be determined in the vehicle’s BMS at the 95% confidence level, which represents the safety margin reflecting the uncertainty.
The outline of this paper is as follows: in
Section 2, the physical parameters of the LIB electrochemical model are estimated using a Bayesian-based probabilistic approach. The estimation is performed for five transport and kinetic factors that are the principal parameters affecting capacity fade. The estimation results reveal that one parameter dominates in determining capacity fade, which means that this parameter alone can be used to monitor SOH. The metamodel for the selected parameter is constructed in
Section 3. The validity of the metamodel is proven through the comparison of voltage curves, and thus the metamodel with its acceptable error can replace the original electrochemical model.
Section 4 shows the parameter estimation results obtained using the generated metamodel. The estimated results are again similar to those produced by the original electrochemical model. However, with the metamodel, the computational cost is reduced from 5.5 h to only a few seconds. This huge reduction in computational cost enables us to integrate SOH monitoring into a vehicle BMS, based on physical parameter estimation. Finally,
Section 5 summarizes the paper’s conclusions.
4. Parameter Estimation Using the Metamodel
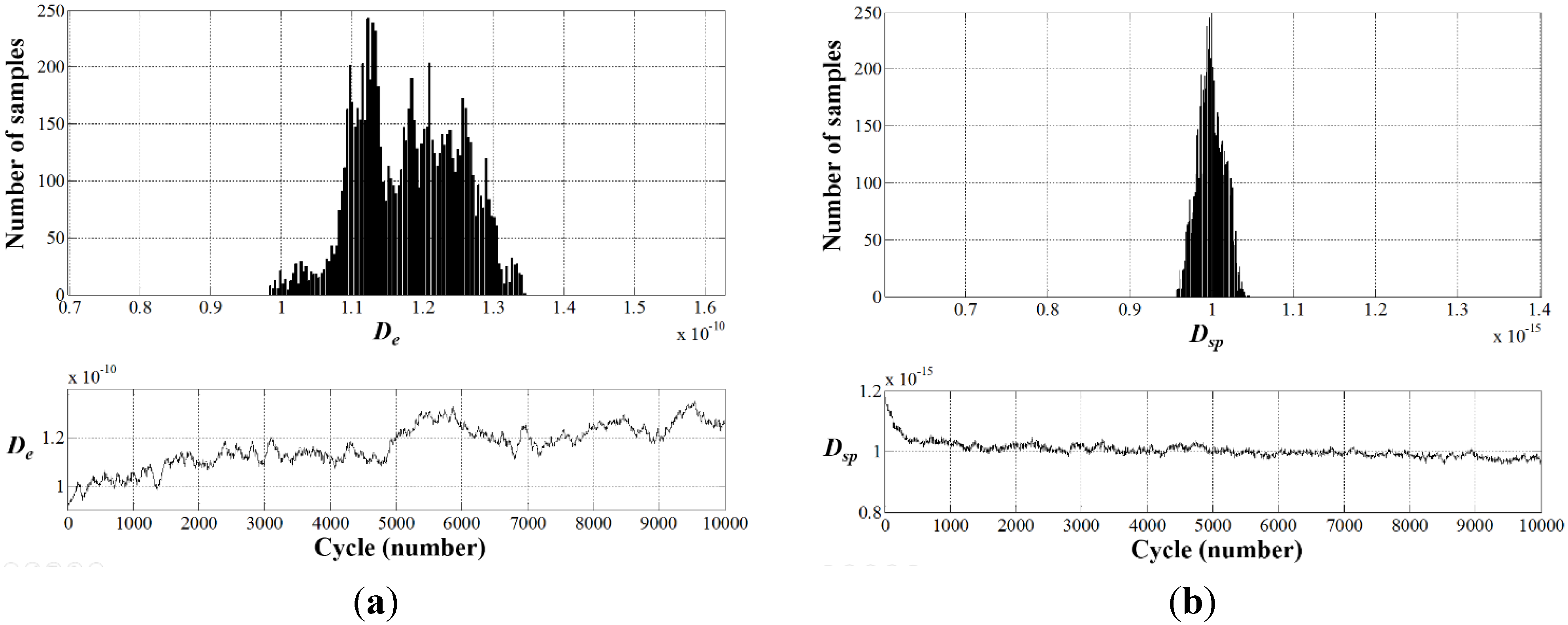
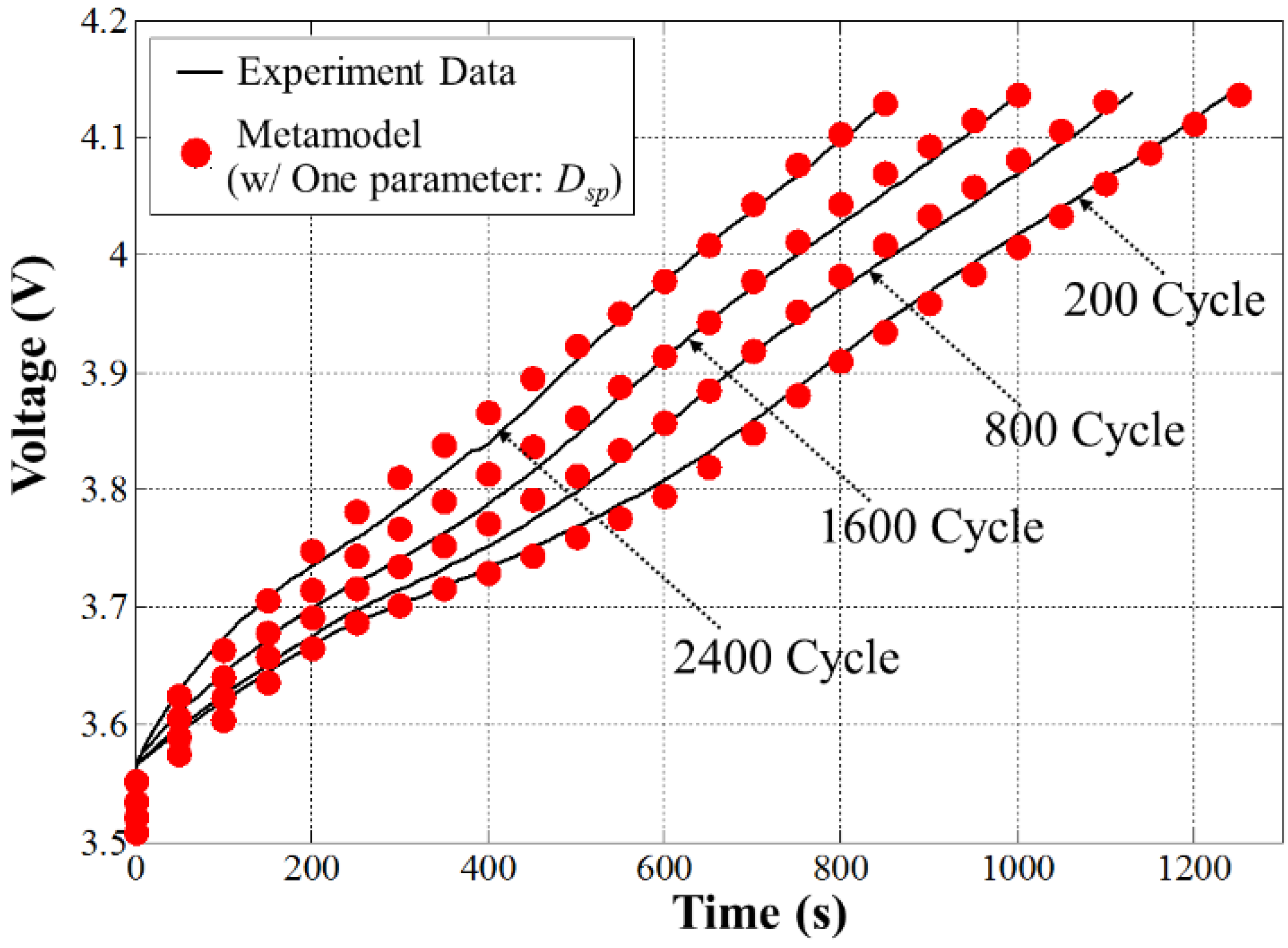
Based on the generated metamodel, the parameter estimation is again performed using the MCMC approach, and the estimation result is presented in
Figure 9, in which the 95% confidence interval and mean value are plotted as a function of the capacity fade %. Please note that only one estimated parameter
Dsp in
Figure 9 includes all the sources of uncertainty. The various uncertainties are involved in one estimated parameter through the standard deviation σ. Here, the standard deviation σ is set as 0.05 V considering the uncertainty of the experimental data. Next, the estimated parameters are applied to the metamodel’s voltage curve to obtain capacity fade in the form of distribution, from which the upper and lower bounds are calculated. The results in
Figure 10 are given in terms of cycles at a 200-cycle increment. Using the metamodel based on fourth-order polynomials instead of the original P2D model that solves a system of nonlinear PDEs, the computational cost is tremendously reduced.
Figure 9.
Parameter (
Dsp) estimate using metamodel (see
Figure 5b).
Figure 9.
Parameter (
Dsp) estimate using metamodel (see
Figure 5b).
Figure 10.
Capacity-fade estimation using the metamodel over the cycles.
Figure 10.
Capacity-fade estimation using the metamodel over the cycles.
Given 10,000 samples, the original model’s computing time is 5.5 h (about 2 s per sample) on an octacore workstation with a 3.4 GHz processor and 16 GB of RAM. However, the same computation takes only a few seconds using the metamodel. Thanks to this reduction, the integration of the proposed approach into a vehicle BMS becomes a feasible option.
5. Conclusions and Future Work
This study proposes an efficient method of uncertainty estimation of capacity fade in LIBs, with the goal of integrating it into the BMS of electric vehicles. The physical parameters of the LIB electrochemical model are estimated using the Bayesian-based probabilistic approach. The estimation is performed for five transport and kinetic parameters that are known to affect capacity fade most significantly. Battery data from the full charge/discharge cycles with 2C-rate condition are utilized to implement the method. From the estimation, it is found that one parameter, the solid-phase diffusivity in the positive electrode, is much more responsible than the others for capacity fade. The metamodel is constructed in terms of this parameter in order to avoid the huge computations that occur in the P2D model for MCMC simulation. As a result, computation cost is reduced from 5.5 h to only a few seconds. The reduction of computation time allows the uncertainty estimation of the parameters in real time during battery use, which adds value to the BMS relative to safety and reliability.
This study considers only the case of 2C-rate full charge/discharge process to illustrate the method, in which the data at charge cycle are used for the capacity-fade estimation. The reason for 2C-rate is to accelerate the cycles. In practice, the rapid charge is usually made at 2C-rate. Therefore, the constructed metamodel works only under the same charge condition. In other words, as long as the parameters are estimated under the same charge condition during usage, the estimated results are reliable and represent the actual faded state at that cycle, regardless of the discharge condition the battery went through. If another C-rate (e.g., the normal 1C-rate) is used for charging, the metamodel can be constructed using the same procedure and applied to that condition. As a result, two models with different C-rate conditions can be installed in one BMS and can be used as appropriate to estimate capacity fade.
In this study, only the full-charge condition is addressed. In actual practice, however, the range of completely charged to completely discharged is never available, and a partial charge is more realistic. The proposed method is unable to estimate in this case, which is a challenge to be addressed in future work.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}







