Recognition of Activities of Daily Living and Environments Using Acoustic Sensors Embedded on Mobile Devices

 , , ,
, , , 


Abstract
:1. Introduction
2. Related Work
3. Methods
3.1. Data Acquisition
3.2. Data Processing
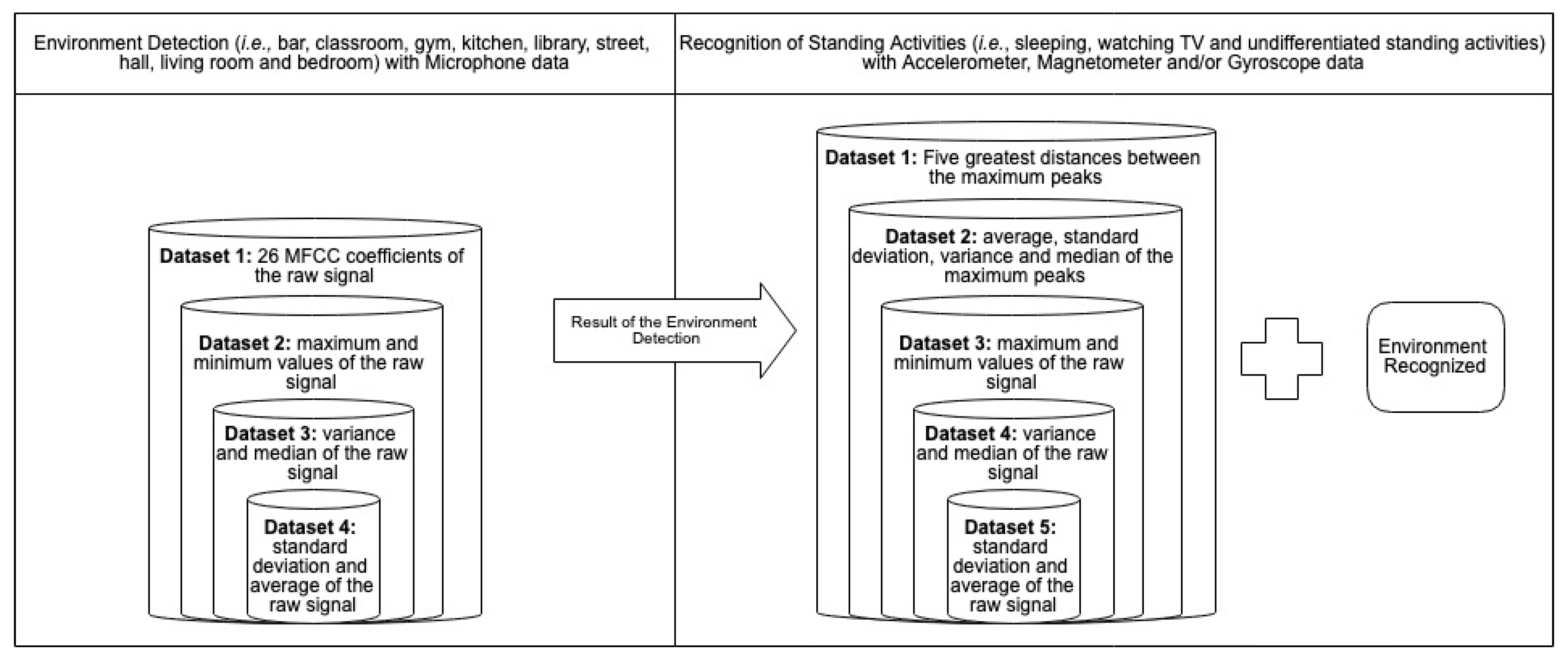
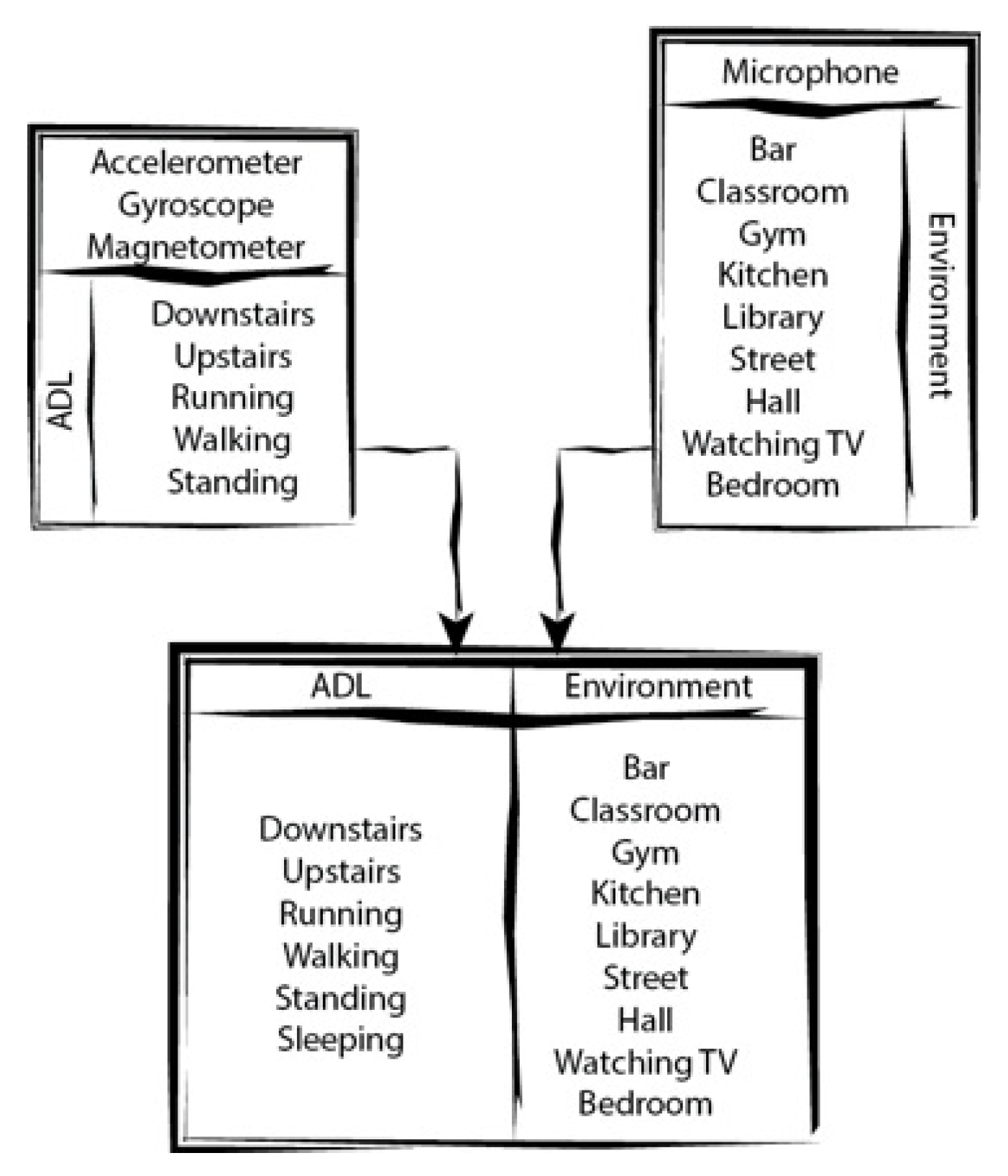
3.3. Data Fusion
- Microphone for the Environment Detection
- Accelerometer data plus Environment Recognized
- Accelerometer and Magnetometer data plus Environment Recognized
- Accelerometer, Magnetometer and Gyroscope data plus Environment Recognized
3.4. Classification
4. Results
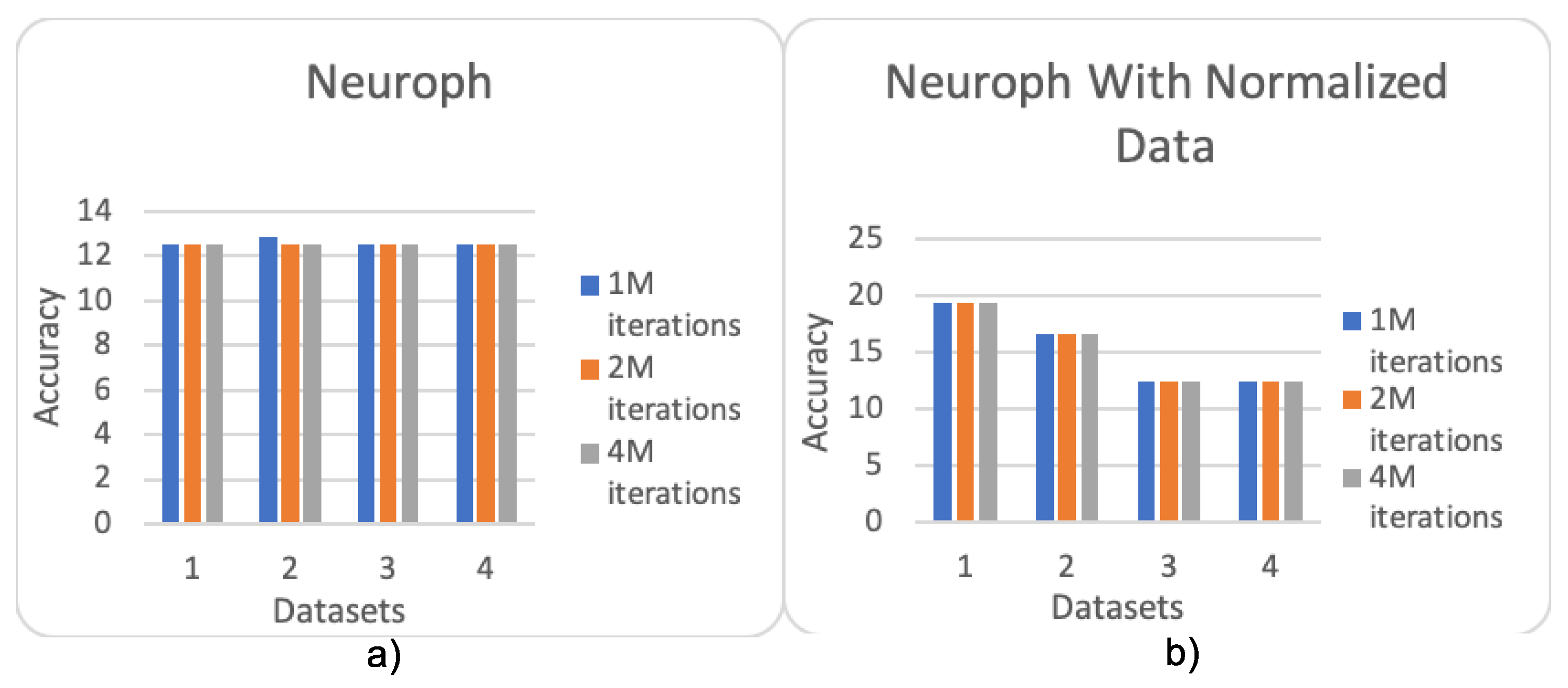
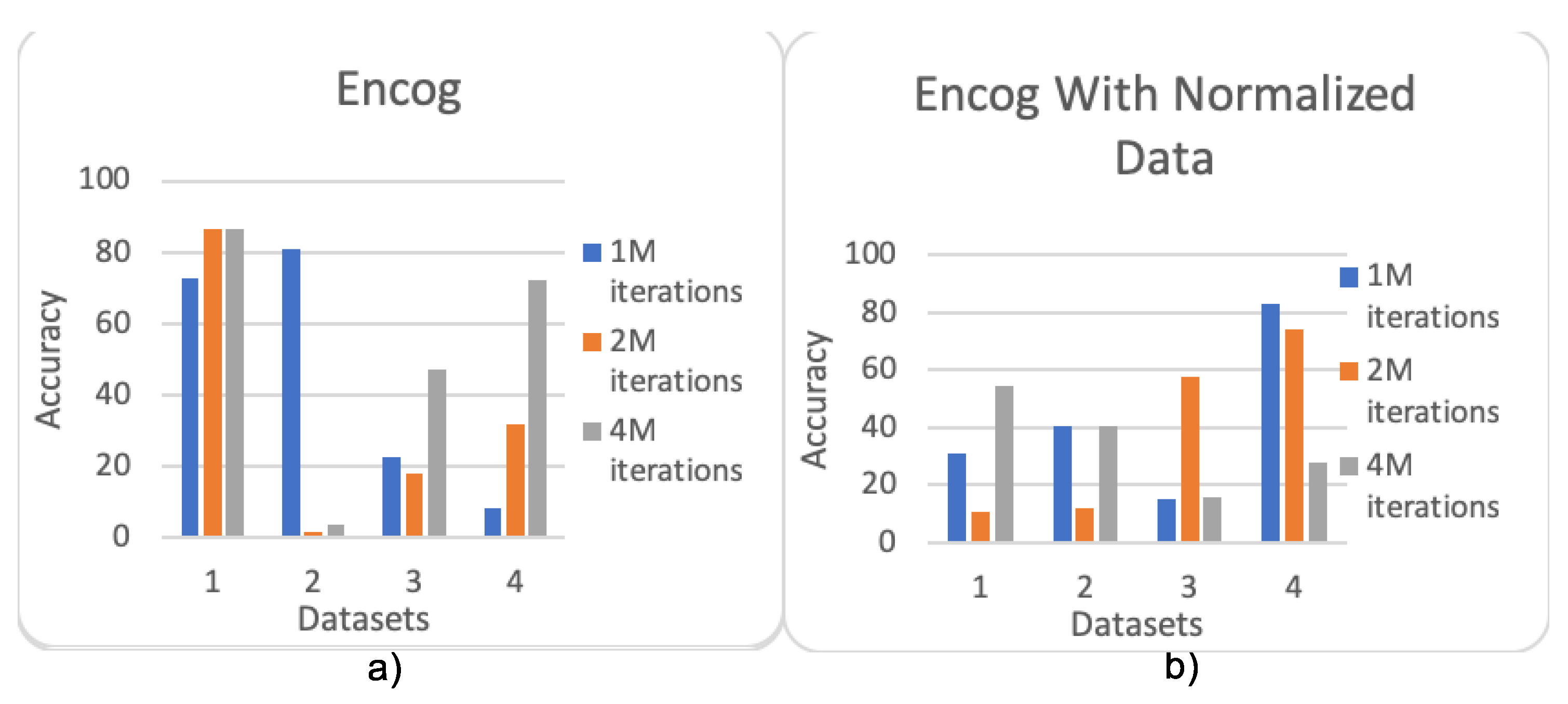
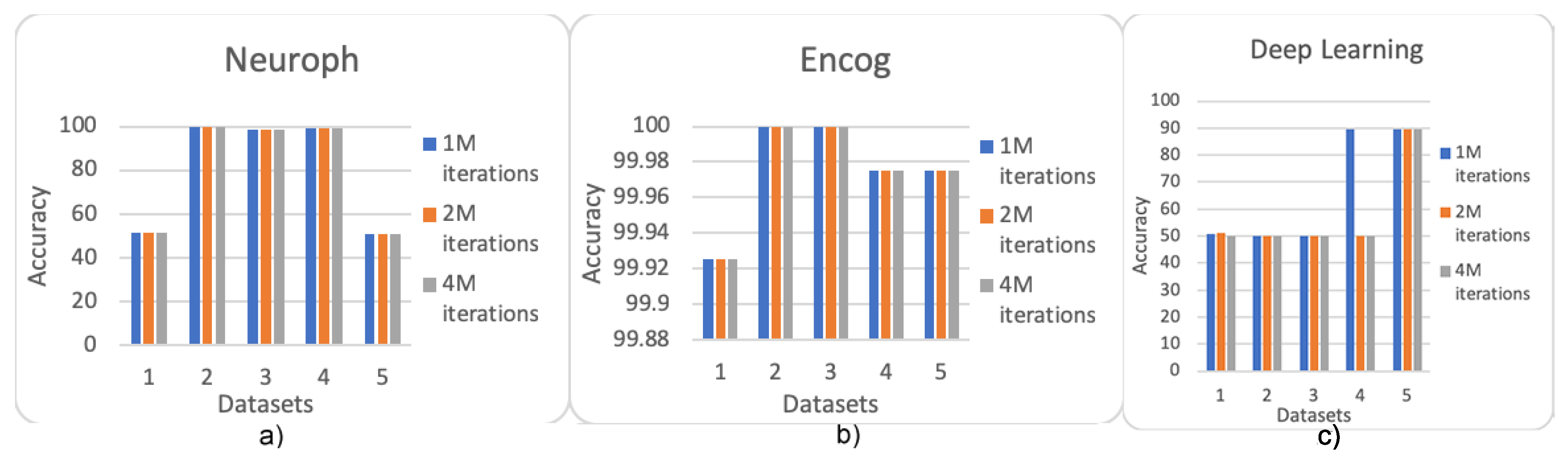
4.1. Identification of the Environment of the Activities of Daily Living with Microphone
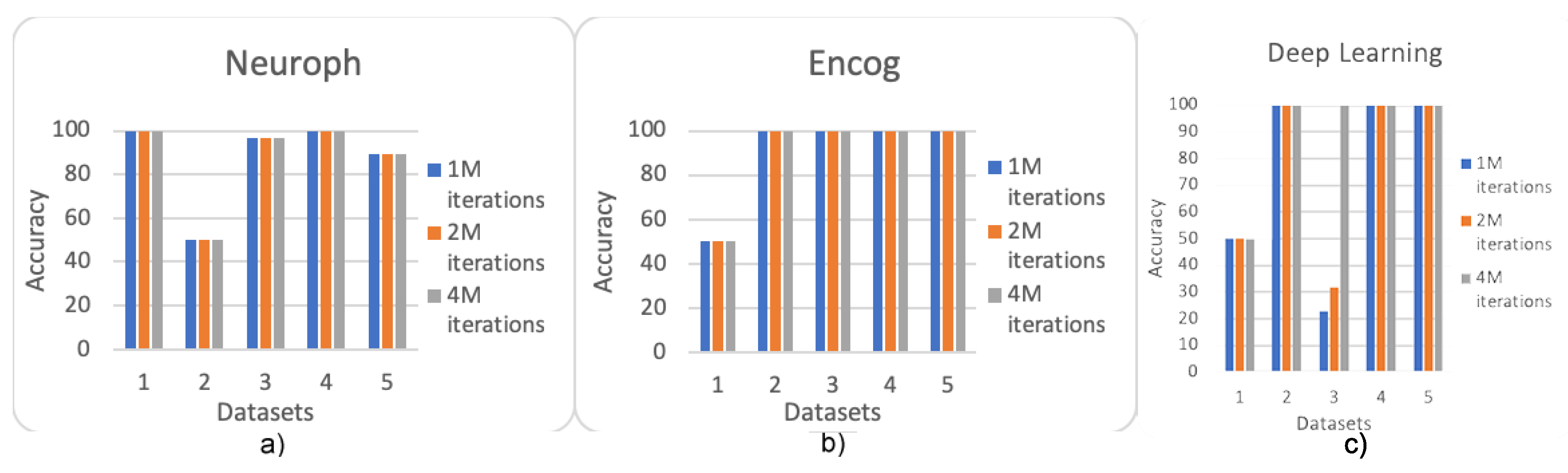
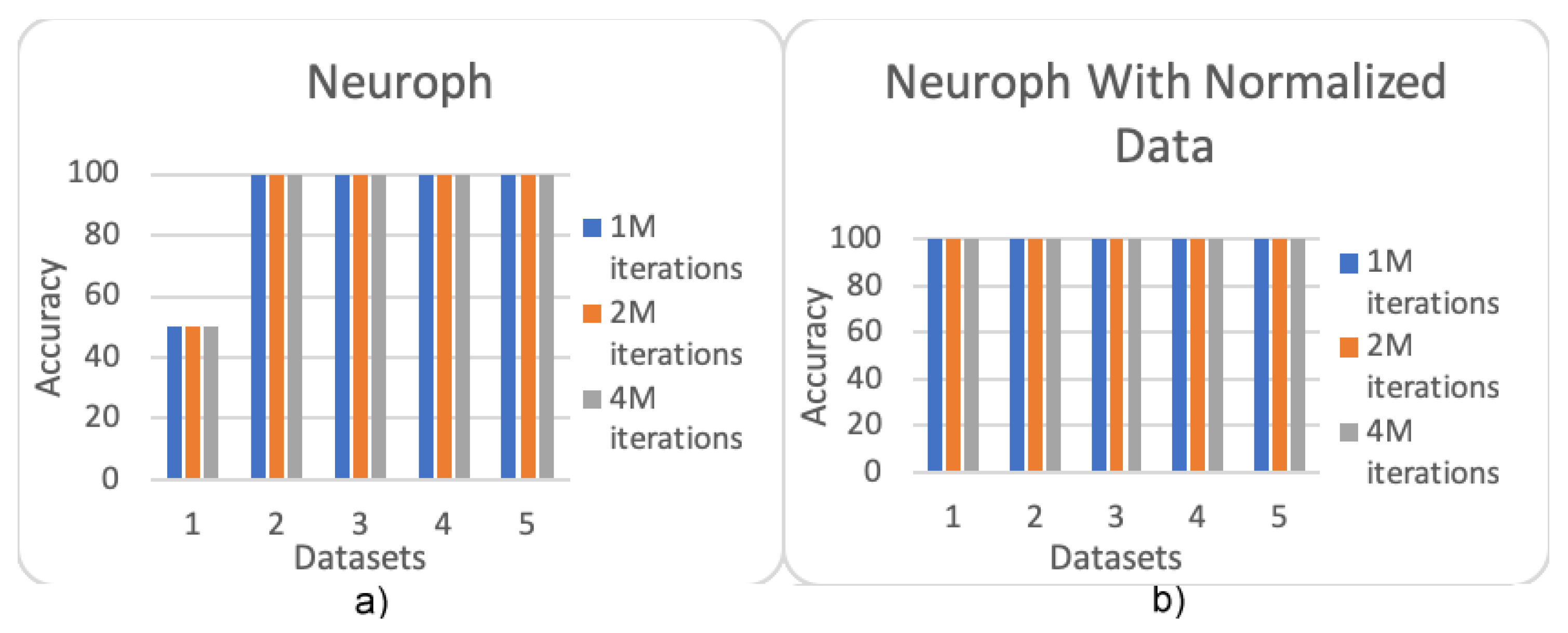
4.2. Identification of the Standing Activities with the Environment Recognized and the Accelerometer Sensor
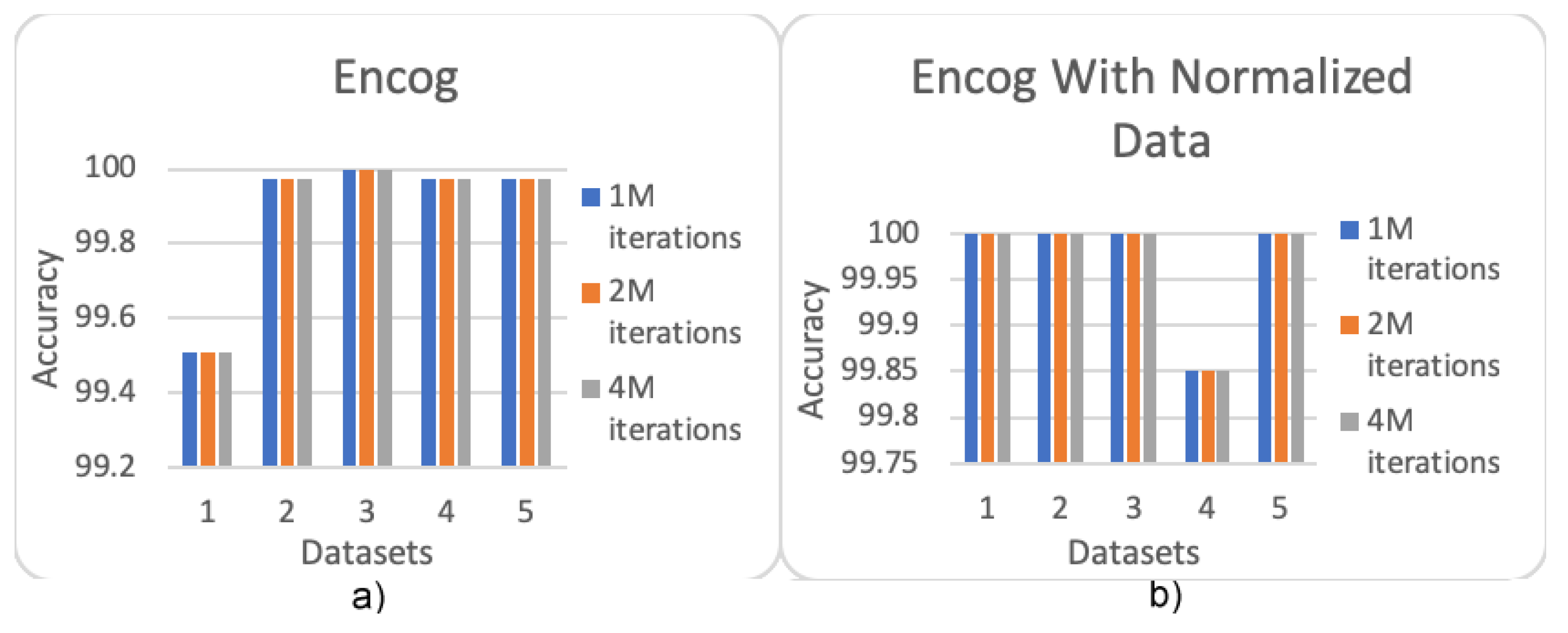
4.3. Identification of the Standing Activities with the Environment Recognized and the Accelerometer and Magnetometer Sensors
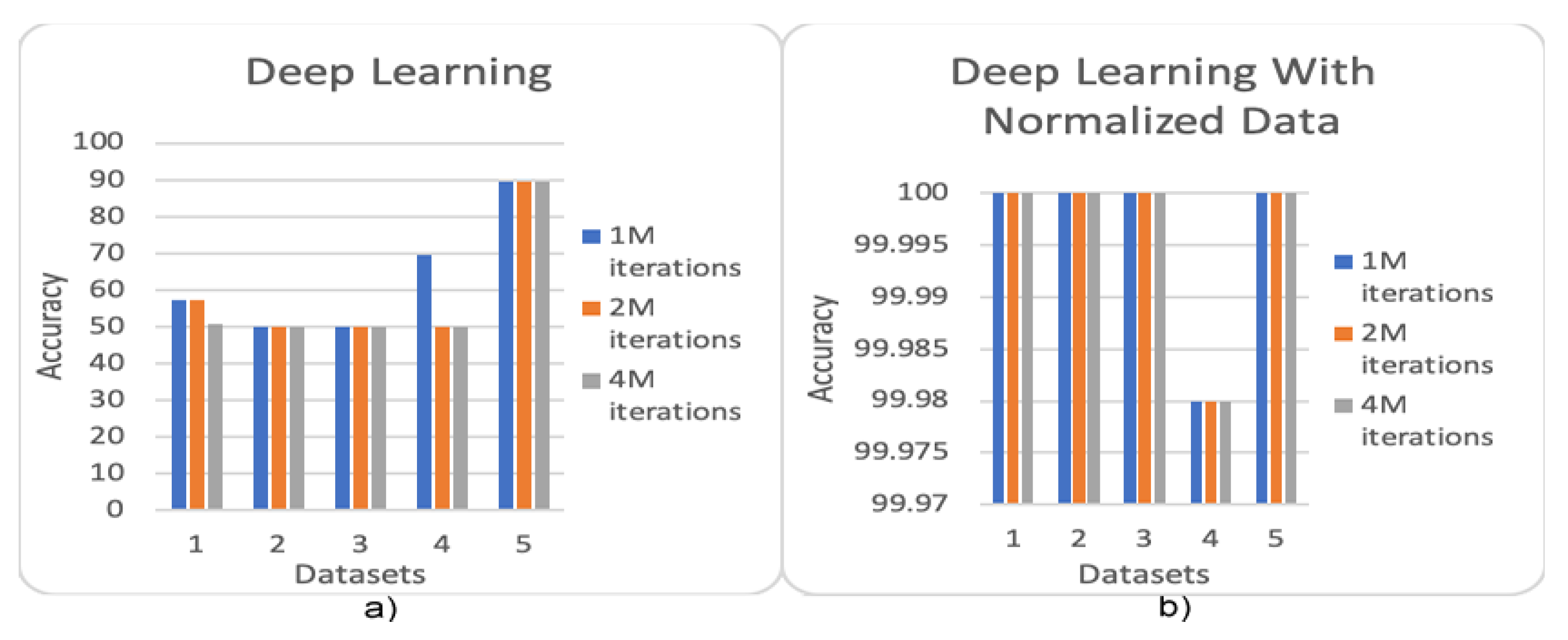
4.4. Identification of the Standing Activities with the Environment Recognized and the Accelerometer, Magnetometer and Gyroscope Sensors
5. Discussion
- DNN with normalized data for the general identification of ADL;
- FNN with non-normalized data for the general identification of the environments;
- DNN with normalized data for the identification of standing activities.
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Foti, D.; Koketsu, J.S. Activities of daily living. In Pedretti’s Occupational Therapy: Practical Skills for Physical Dysfunction; Elsevier: Amsterdam, The Netherlands, 2013; Volume 7, pp. 157–232. [Google Scholar]
- Salazar, L.H.A.; Lacerda, T.; Nunes, J.V.; von Wangenheim, C.G. A Systematic Literature Review on Usability Heuristics for Mobile Phones. Int. J. Mob. Hum. Comput. Interact. 2013, 5, 50–61. [Google Scholar] [CrossRef] [Green Version]
- Garcia, N.M. A Roadmap to the Design of A Personal Digital Life Coach; Springer: Berlin, Germany, 2016. [Google Scholar]
- Pires, I.M.; Garcia, N.M.; Pombo, N.; Flórez-Revuelta, F.; Spinsante, S.; Teixeira, M.C. Identification of Activities of Daily Living through Data Fusion on Motion and Magnetic Sensors embedded on Mobile Devices. Pervasive Mob. Comput. 2018, 47, 78–93. [Google Scholar] [CrossRef]
- Pires, I.; Garcia, N.; Pombo, N.; Flórez-Revuelta, F. From Data Acquisition to Data Fusion: A Comprehensive Review and a Roadmap for the Identification of Activities of Daily Living Using Mobile Devices. Sensors 2016, 16, 184. [Google Scholar] [CrossRef] [PubMed]
- Pires, I.M.; Garcia, N.M.; Flórez-Revuelta, F. Multi-sensor data fusion techniques for the identification of activities of daily living using mobile devices. In Proceedings of the ECMLPKDD 2015 Doctoral Consortium, European Conference on Machine Learning and Principles and Practice of Knowledge Discovery in Databases, Porto, Portugal, 7–11 September 2015. [Google Scholar]
- Pires, I.M.; Garcia, N.M.; Pombo, N.; Flórez-Revuelta, F. Identification of Activities of Daily Living Using Sensors Available in off-the-shelf Mobile Devices: Research and Hypothesis. In Proceedings of the Ambient Intelligence-Software and Applications-7th International Symposium on Ambient Intelligence (ISAmI 2016), Seville, Spain, 1–3 June 2016; pp. 121–130. [Google Scholar]
- Banos, O.; Damas, M.; Pomares, H.; Rojas, I. On the use of sensor fusion to reduce the impact of rotational and additive noise in human activity recognition. Sensors 2012, 12, 8039–8054. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Akhoundi, M.A.A.; Valavi, E. Multi-Sensor Fuzzy Data Fusion Using Sensors with Different Characteristics. arXiv 2010, arXiv:1010.6096. [Google Scholar]
- Paul, P.; George, T. An Effective Approach for Human Activity Recognition on Smartphone. In Proceedings of the 2015 IEEE International Conference on Engineering and Technology (Icetech), Coimbatore, India, 20 March 2015; pp. 45–47. [Google Scholar] [CrossRef]
- Hsu, Y.-W.; Chen, K.-H.; Yang, J.-J.; Jaw, F.-S. Smartphone-based fall detection algorithm using feature extraction. In Proceedings of the 9th International Congress on Image and Signal Processing, BioMedical Engineering and Informatics (CISP-BMEI), Datong, China, 15–17 October 2016; pp. 1535–1540. [Google Scholar]
- Dernbach, S.; Das, B.; Krishnan, N.C.; Thomas, B.L.; Cook, D.J. Simple and Complex Activity Recognition through Smart Phones. In Proceedings of the 8th International Conference on Intelligent Environments (IE), Guanajuato, Mexico, 26–29 June 2012; pp. 214–221. [Google Scholar]
- Shen, C.; Chen, Y.F.; Yang, G.S. On Motion-Sensor Behavior Analysis for Human-Activity Recognition via Smartphones. In Proceedings of the IEEE International Conference on Identity, Security and Behavior Analysis (Isba), Sendai, Japan, 29 February–2 March 2016; pp. 1–6. [Google Scholar]
- Wang, D. Pattern recognition: Neural networks in perspective. IEEE Expert 1993, 8, 52–60. [Google Scholar] [CrossRef]
- Doya, K.; Wang, D. Exciting Time for Neural Networks. Neural Netw. 2015, 61. [Google Scholar] [CrossRef]
- Pires, I.M.; Garcia, N.M.; Pombo, N.; Pires, F.F.L.; Spinsante, S.; Teixeira, M.C.; Zdravevski, E. Pattern Recognition Techniques for the Identification of Activities of Daily Living using Mobile Device Accelerometer. PeerJ Prepr. 2019. [Google Scholar] [CrossRef]
- Gripenberg, G. Approximation by neural networks with a bounded number of nodes at each level. J. Approx. Theory 2003, 122, 260–266. [Google Scholar] [CrossRef] [Green Version]
- Schmidhuber, J. Deep learning in neural networks: An overview. Neural Netw. 2015, 61, 85–117. [Google Scholar] [CrossRef] [Green Version]
- Costarelli, D.; Vinti, G. Pointwise and uniform approximation by multivariate neural network operators of the max-product type. Neural Netw. 2016, 81, 81–90. [Google Scholar] [CrossRef] [PubMed]
- Lane, N.D.; Mohammod, M.; Lin, M.; Yang, X.; Lu, H.; Ali, S.; Doryab, A.; Berke, E.; Choudhury, T.; Campbell, A. Bewell: A smartphone application to monitor, model and promote wellbeing. In Proceedings of the 5th international ICST conference on pervasive computing technologies for healthcare, Dublin, Ireland, 23–26 May 2011. [Google Scholar]
- Mengistu, Y.; Pham, M.; Do, H.M.; Sheng, W. AutoHydrate: A Wearable Hydration Monitoring System. In Proceedings of the IEEE/Rsj International Conference on Intelligent Robots and Systems (Iros 2016), Daejeon, Korea, 9–14 October 2016; pp. 1857–1862. [Google Scholar] [CrossRef]
- Nishida, M.; Kitaoka, N.; Takeda, K. Daily activity recognition based on acoustic signals and acceleration signals estimated with Gaussian process. In Proceedings of the 2015 Asia-Pacific Signal and Information Processing Association Annual Summit and Conference (APSIPA), Hong Kong, China, 16–19 December 2015; pp. 279–282. [Google Scholar]
- Filios, G.; Nikoletseas, S.; Pavlopoulou, C.; Rapti, M.; Ziegler, S. Hierarchical Algorithm for Daily Activity Recognition via Smartphone Sensors. In Proceedings of the IEEE 2nd World Forum on Internet of Things (Wf-Iot), Milan, Italy, 14–16 December 2015; pp. 381–386. [Google Scholar] [CrossRef]
- Delgado-Contreras, J.R.; Garæia-Vázquez, J.P.; Brena, R.F.; Galván-Tejada, C.E.; Galván-Tejada, J.I. Feature Selection for Place Classification through Environmental Sounds. Procedia Comput. Sci. 2014, 37, 40–47. [Google Scholar] [CrossRef] [Green Version]
- Rahman, T.; Adams, A.T.; Zhang, M.; Cherry, E.; Zhou, B.; Peng, H.; Choudhury, T. BodyBeat: A mobile system for sensing non-speech body sounds. In Proceedings of the 12th Annual International Conference on Mobile Systems, Applications, and Services, Bretton Woods, NH, USA, 16–19 June 2014. [Google Scholar]
- Mielke, M.; Brück, R. Smartphone application for automatic classification of environmental sound. In Proceedings of the 20th International Conference Mixed Design of Integrated Circuits and Systems-MIXDES, Gdynia, Poland, 20–22 June 2013; pp. 512–515. [Google Scholar]
- Guo, X.; Toyoda, Y.; Li, H.; Huang, J.; Ding, S.; Liu, Y. Environmental sound recognition using time-frequency intersection patterns. In Proceedings of the 3rd International Conference on Awareness Science and Technology (iCAST), Ypsilanti, MI, USA, 3–5 October 2011; pp. 243–246. [Google Scholar]
- Pillos, A.; Alghamidi, K.; Alzamel, N.; Pavlov, V.; Machanavajhala, S. A real-time environmental sound recognition system for the Android OS. In Proceedings of the Detection and Classification of Acoustic Scenes and Events, Budapest, Hungary, 3 September 2016. [Google Scholar]
- Mielke, M.; Brueck, R. Design and evaluation of a smartphone application for non-speech sound awareness for people with hearing loss. In Proceedings of the 37th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Milan, Italy, 25–29 August 2015; pp. 5008–5011. [Google Scholar]
- Dubey, H.; Mehl, M.R.; Mankodiya, K. BigEAR: Inferring the Ambient and Emotional Correlates from Smartphone-Based Acoustic Big Data. In Proceedings of the IEEE First International Conference on Connected Health: Applications, Systems and Engineering Technologies (CHASE), Washington, DC, USA, 27–29 June 2016; pp. 78–83. [Google Scholar]
- Lane, N.D.; Georgiev, P.; Qendro, L. DeepEar: Robust smartphone audio sensing in unconstrained acoustic environments using DNN. In Proceedings of the 2015 ACM International Joint Conference on Pervasive and Ubiquitous Computing, Osaka, Japan, 7–11 September 2015. [Google Scholar]
- Wang, J.; Ruby, R.; Wang, L.; Wu, K. Accurate Combined Keystrokes Detection Using Acoustic Signals. In Proceedings of the 12th International Conference on Mobile Ad-Hoc and Sensor Networks (MSN), Shenyang, China, 9–14 December 2016. [Google Scholar]
- Rossi, M.; Feese, S.; Amft, O.; Braune, N.; Martis, S.; Tröster, G. AmbientSense: A real-time ambient sound recognition system for smartphones. In Proceedings of the IEEE International Conference on Pervasive Computing and Communications Workshops (PERCOM Workshops), San Diego, CA, USA, 18–22 March 2013; pp. 230–235. [Google Scholar]
- Nishijima, K.; Uenohara, S.; Furuya, K. A Study on the Optimum Number of Training Data in Snore Activity Detection Using SVM. In Proceedings of the 10th International Conference on Complex, Intelligent, and Software Intensive Systems (CISIS), Fukuoka, Japan, 6–8 July 2016; pp. 582–584. [Google Scholar]
- Nishijima, K.; Uenohara, S.; Furuya, K. Snore activity detection using smartphone sensors. In Proceedings of the IEEE International Conference on Consumer Electronics-Taiwan, Taipei, Taiwan, 6–8 June 2015; pp. 128–129. [Google Scholar]
- Gaunard, P.; Mubikangiey, C.G.; Couvreur, C.; Fontaine, V. Automatic classification of environmental noise events by hidden Markov models. IEEE Int. Conf. Acoust. Speech Signal Process. 1998, 3, 3609–3612. [Google Scholar]
- Zilli, D.; Parson, O.; Merrett, G.V.; Rogers, A. A Hidden Markov Model-Based Acoust. Cicada Detect. Crowdsourced Smartphone Biodivers. Monit. J. Artif. Int. Res. 2014, 51, 805–827. [Google Scholar]
- Song, T.; Cheng, X.; Li, H.; Yu, J.; Wang, S.; Bie, R. Detecting driver phone calls in a moving vehicle based on voice features. In Proceedings of the IEEE INFOCOM 2016-The 35th Annual IEEE International Conference on Computer Communications, San Francisco, CA, USA, 10–14 April 2016. [Google Scholar]
- Chen, Y.A.; Chen, J.; Tseng, Y.C. Inference of Conversation Partners by Cooperative Acoustic Sensing in Smartphone Networks. IEEE Trans. Mob. Comput. 2016, 15, 1387–1400. [Google Scholar] [CrossRef]
- Gomes, E.F.; Batista, B.; Jorge, P.M. Using Smartphones to Classify Urban Sounds. In Proceedings of the Ninth International Conference on Computer Science & Software Engineering, Porto, Portugal, 20–22 July 2016. [Google Scholar]
- Lu, H.; Pan, W.; Lane, N.D.; Choudhury, T.; Campbell, A.T. SoundSense: Scalable sound sensing for people-centric applications on mobile phones. In Proceedings of the 7th International Conference on Mobile Systems, Applications, and Services, Kraków, Poland, 22–25 June 2009. [Google Scholar]
- Sigtia, S.; Stark, A.M.; Krstulovic, S.; Plumbley, M.D. Automatic Environmental Sound Recognition: Performance Versus Computational Cost. IEEE/ACM Trans. Audio Speech Lang. Process. 2016, 24, 2096–2107. [Google Scholar] [CrossRef]
- Kelly, D.; Caulfield, B. Pervasive Sound Sensing: A Weakly Supervised Training Approach. IEEE Trans. Cybern. 2016, 46, 123–135. [Google Scholar] [CrossRef] [Green Version]
- Abreha, G.T. An Environmental Audio-Based Contextrecognition System Using Smartphones. Master’s Thesis, University of Twente, Enschede, The Netherlands, August 2014. [Google Scholar]
- Saki, F.; Sehgal, A.; Panahi, I.; Kehtarnavaz, N. Smartphone-based real-time classification of noise signals using subband features and random forest classifier. In Proceedings of the IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Shanghai, China, 20–25 March 2016; pp. 2204–2208. [Google Scholar]
- Inoue, S.; Ueda, N.; Nohara, Y.; Nakashima, N. Mobile activity recognition for a whole day: Recognizing real nursing activities with big dataset. In Proceedings of the 2015 ACM International Joint Conference on Pervasive and Ubiquitous Computing, Osaka, Japan, 7–11 September 2015. [Google Scholar]
- Bountourakis, V.; Vrysis, L.; Papanikolaou, G. Machine Learning Algorithms for Environmental Sound Recognition: Towards Soundscape Semantics. In Proceedings of the Audio Mostly 2015 on Interaction with Sound, Thessaloniki, Greece, 7–9 October 2015. [Google Scholar]
- Cheffena, M. Fall Detection Using Smartphone Audio Features. IEEE J. Biomed. Health Inf. 2016, 20, 1073–1080. [Google Scholar] [CrossRef]
- Sehgal, A.; Saki, F.; Kehtarnavaz, N. Real-time implementation of voice activity detector on ARM embedded processor of smartphones. In Proceedings of the 2017 IEEE 26th International Symposium on Industrial Electronics (ISIE), Edinburgh, UK, 19–21 June 2017. [Google Scholar] [CrossRef]
- Elhamshary, M.; Youssef, M.; Uchiyama, A.; Yamaguchi, H.; Higashino, T. CrowdMeter: Congestion Level Estimation in Railway Stations Using Smartphones. In Proceedings of the 2018 IEEE International Conference on Pervasive Computing and Communications (PerCom), Athens, Greece, 19–23 March 2018; pp. 1–12. [Google Scholar] [CrossRef]
- Hoyos-Barceló, C.; Monge-Álvarez, J.; Shakir, M.Z.; Alcaraz-Calero, J.-M.; Casaseca-de-la-Higuera, P. Efficient k-NN Implementation for Real-Time Detection of Cough Events in Smartphones. IEEE J. Biomed. Health Inform. 2018, 22, 1662–1671. [Google Scholar] [CrossRef] [Green Version]
- Monge-Alvarez, J.; Hoyos-Barcelo, C.; Lesso, P.; Casaseca-de-la-Higuera, P. Robust Detection of Audio-Cough Events using local Hu moments. IEEE J. Biomed. Health Inform. 2018, 23, 184–196. [Google Scholar] [CrossRef]
- Bi, C.; Xing, G.; Hao, T.; Huh, J.; Peng, W.; Ma, M. FamilyLog: A mobile system for monitoring family mealtime activities. In Proceedings of the 2017 IEEE International Conference on Pervasive Computing and Communications (PerCom), Seattle, WA, USA, 21–25 March 2017; pp. 21–30. [Google Scholar] [CrossRef] [Green Version]
- Soni, S.; Aggarwal, N.; Vij, D.; Doegar, A. Acoustic Scene Classification for Personal Commuting Mode: Detecting Polluting vs. Non Polluting Vehicles. In In Proceedings of the 2018 8th International Conference on Cloud Computing, Data Science & Engineering (Confluence), Noida, India, 11–12 January 2018; pp. 274–279. [Google Scholar] [CrossRef]
- Gu, F.; Niu, J.; He, Z.; Jin, X.; Rodrigues, J.J.P.C. SmartBuddy: An Integrated Mobile Sensing and Detecting System for Family Activities. In Proceedings of the 2017 IEEE Global Communications Conference (GLOBECOM 2017), Singapore, 4–8 December 2017; pp. 1–7. [Google Scholar] [CrossRef]
- Yu, Z.; Du, H.; Xiao, D.; Wang, Z.; Han, Q.; Guo, B. SmartBuddy: An Integrated Mobile Sensing and Detecting System for Family Activities. IEEE Internet Things J. 2018, 5, 1156–1168. [Google Scholar] [CrossRef]
- Kawanaka, S.; Kashimoto, Y.; Firouzian, A.; Arakawa, Y.; Pulli, P.; Yasumoto, K. Approaching vehicle detection method with acoustic analysis using smartphone for elderly bicycle driver. In Proceedings of the 2017 Tenth International Conference on Mobile Computing and Ubiquitous Network (ICMU), Toyama, Japan, 3–5 October 2017; pp. 1–6. [Google Scholar] [CrossRef] [Green Version]
- Su, X.; Sperlì, G.; Moscato, V.; Picariello, A.; Esposito, C.; Choi, C. An Edge Intelligence Empowered Recommender System Enabling Cultural Heritage Applications. IEEE Trans. Ind. Inform. 2019, 15, 4266–4275. [Google Scholar] [CrossRef]
- Chen, L.; Nugent, C.D. Sensor-Based Activity Recognition Review. In Human Activity Recognition and Behaviour Analysis; Springer: Cham, Switzerland, 2019; pp. 23–47. [Google Scholar]
- Amato, F.; Moscato, V.; Picariello, A.; Sperli’ì, G. Extreme events management using multimedia social networks. Future Gener. Comput. Syst. 2019, 94, 444–452. [Google Scholar] [CrossRef]
- Rader, C.; Brenner, N. A new principle for fast Fourier transformation. IEEE Trans. Acoust. Speech Signal Process. 1976, 24, 264–266. [Google Scholar] [CrossRef]
- Graizer, V. Effect of low-pass filtering and re-sampling on spectral and peak ground acceleration in strong-motion records. In Proceedings of the 15th World Conference of Earthquake Engineering, Lisbon, Portugal, 24–28 September 2012; pp. 24–28. [Google Scholar]
- ALLab. August 2017-Multi-Sensor Data Fusion in Mobile Devices for the Identification of Activities of Daily Living-ALLab Signals. Available online: https://allab.di.ubi.pt/mediawiki/index.php/August_2017-_Multi-sensor_data_fusion_in_mobile_devices_for_the_identification_of_activities_of_daily_living (accessed on 2 September 2017).











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ADL: | Number of Studies: |
|---|---|
| Street with emergency vehicles (police, fire department and ambulance) | 6 |
| Sleeping; walking; standing; street traffic; ocean | 5 |
| Driving; river | 4 |
| Sitting; cleaning with a vacuum cleaner; train; nature; typing; dog barking; baby crying; raining; music | 3 |
| Running; lying; going upstairs; going downstairs; drinking; shopping; travelling by car; cooking; watching television; eating; working on a computer; reading; washing dishes; restaurant; laughing; door opening/closing; telephone ringing; helicopter; speech; coffee machine; elevator | 2 |
| social interaction activities; jogging; cycling; cleaning table; going to toilet; waiting in a queue; being a bar; casino; playground; clearing the throat; relaxing; coughing; sniffling; talking; grains falling; whistle; sneezing; clock ticking; arguing; football; shaver; bird; dishwasher; brushing teeth; bus; calling; air conditioner; car horn; children playing; drilling; meeting; chatting; shower; clapping; smoking alarm; hand washing | 1 |
| Features: | Number of Studies: |
|---|---|
| Mel-Frequency Cepstral Coefficients (MFCC) | 21 |
| zero-crossing rate | 8 |
| spectral roll-off | 6 |
| spectral centroid; spectral flux | 5 |
| total Root-Mean-Square (RMS) energy | 4 |
| Mean; standard deviation; minimum; median; low energy frame rate | 3 |
| spectral spread; log power; skewness; kurtosis; sound pressure level (SPL); bandwidth; Relative Spectral Entropy (RSE) | 2 |
| total spectrum power; sub-band powers; range; angular degree; slope; coefficient of variation; inverse coefficient of variation; trimmed mean; percentiles (1st, 57th, 95th and 99th); spectral variance; spectral skewness; spectral kurtosis; spectral slope; maximum; quartiles (1st and 3rd); interquartile range; number of peaks; mean distance of peaks; mean amplitude of peaks; mean crossing rate; linear regression slope; spectral flatness; threshold; noise level; one-third-octave spectra; statistical indices; motif; normalized weighted phase deviation; Normalized Mel-Frequency Bands; short-time energy; temporal centroid; energy entropy; autocorrelation; spectral entropy | 1 |
| Methods: | Number of Studies: | Average of Reported Accuracy: |
|---|---|---|
| Multi-Layer Perceptron (MLP) | 3 | 96% |
| k-Nearest Neighbour (k-NN) | 3 | 95% |
| Gradient Boosting Decision Tree | 1 | 92% |
| IBk lazy algorithm | 1 | 91% |
| logistic regression | 1 | 90% |
| linear regression | 1 | 90% |
| Feedforward Neural Networks (FNN) | 1 | 90% |
| Hidden Markov Models (HMM) | 2 | 87% |
| diverse density (DD) | 1 | 87% |
| expected maximization (EM) | 1 | 87% |
| J48 decision tree | 2 | 84% |
| FT decision tree | 2 | 84% |
| LMT decision tree | 2 | 84% |
| Support Vector Machine (SVM) | 10 | 77% |
| Gaussian mixture model (GMM) | 5 | 76% |
| Deep Neural Networks (DNN) | 3 | 68% |
| Linear Discriminant Classifier (LDC) | 1 | 67% |
| Random Forests | 3 | 66% |
| Adaboost | 1 | 65% |
| Recurrent Neural Networks (RNN) | 1 | 24% |
| Framework | Datasets | Iterations Needed for Training | Best Accuracy Achieved (%) | |
|---|---|---|---|---|
| Non- normalized data | MLP with Backpropagation | 2 | 10 | 12.86 |
| FNN with Backpropagation | 1 | 2 × 10 | 86.50 | |
| DNN | 4 | 4 × 10 | 48.11 | |
| Normalized data | MLP with Backpropagation | 1 | 10 | 19.43 |
| FNN with Backpropagation | 4 | 10 | 82.75 | |
| DNN | 4 | 4 × 10 | 48.74 |
| Framework | Datasets | Iterations Needed for Training | Best Accuracy Achieved (%) | |
|---|---|---|---|---|
| Non- normalized data | MLP with Backpropagation | 1 | 10 | 100.00 |
| FNN with Backpropagation | 2 | 10 | 100.00 | |
| DNN | 2 | 10 | 100.00 | |
| Normalized data | MLP with Backpropagation | 1 | 10 | 100.00 |
| FNN with Backpropagation | 1 | 10 | 100.00 | |
| DNN | 1 | 10 | 100.00 |
| Framework | Datasets | Iterations Needed for Training | Best Accuracy Achieved (%) | |
|---|---|---|---|---|
| Non- normalized data | MLP with Backpropagation | 4 | 10 | 99.05 |
| FNN with Backpropagation | 2 | 10 | 100.00 | |
| DNN | 3 | 10 | 89.55 | |
| Normalized data | MLP with Backpropagation | 1 | 10 | 100.00 |
| FNN with Backpropagation | 1 | 10 | 100.00 | |
| DNN | 1 | 10 | 100.00 |
| Framework | Datasets | Iterations Needed for Training | Best Accuracy Achieved (%) | |
|---|---|---|---|---|
| Non- normalized data | MLP with Backpropagation | 2 | 10 | 100.00 |
| FNN with Backpropagation | 3 | 10 | 100.00 | |
| DNN | 5 | 10 | 89.55 | |
| Normalized data | MLP with Backpropagation | 1 | 10 | 100.00 |
| FNN with Backpropagation | 1 | 10 | 100.00 | |
| DNN | 1 | 10 | 100.00 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pires, I.M.; Marques, G.; Garcia, N.M.; Pombo, N.; Flórez-Revuelta, F.; Spinsante, S.; Teixeira, M.C.; Zdravevski, E. Recognition of Activities of Daily Living and Environments Using Acoustic Sensors Embedded on Mobile Devices. Electronics 2019, 8, 1499. https://doi.org/10.3390/electronics8121499
Pires IM, Marques G, Garcia NM, Pombo N, Flórez-Revuelta F, Spinsante S, Teixeira MC, Zdravevski E. Recognition of Activities of Daily Living and Environments Using Acoustic Sensors Embedded on Mobile Devices. Electronics. 2019; 8(12):1499. https://doi.org/10.3390/electronics8121499
Chicago/Turabian StylePires, Ivan Miguel, Gonçalo Marques, Nuno M. Garcia, Nuno Pombo, Francisco Flórez-Revuelta, Susanna Spinsante, Maria Canavarro Teixeira, and Eftim Zdravevski. 2019. "Recognition of Activities of Daily Living and Environments Using Acoustic Sensors Embedded on Mobile Devices" Electronics 8, no. 12: 1499. https://doi.org/10.3390/electronics8121499