2.1. Dynamic Model of Synchronous Power Plant
Transforming the non-linear model of the synchronous generator into a linear model is essential for oscillatory stability studies. The synchronous generator model can be linearized using Park transformation [
19]. The details of the park transformation and the synchronous generator non-linear model can be found in [
19] and the references therein.
The state-space model of the synchronous generator based on the park transformation for the oscillatory stability can be expressed as Equation (1).
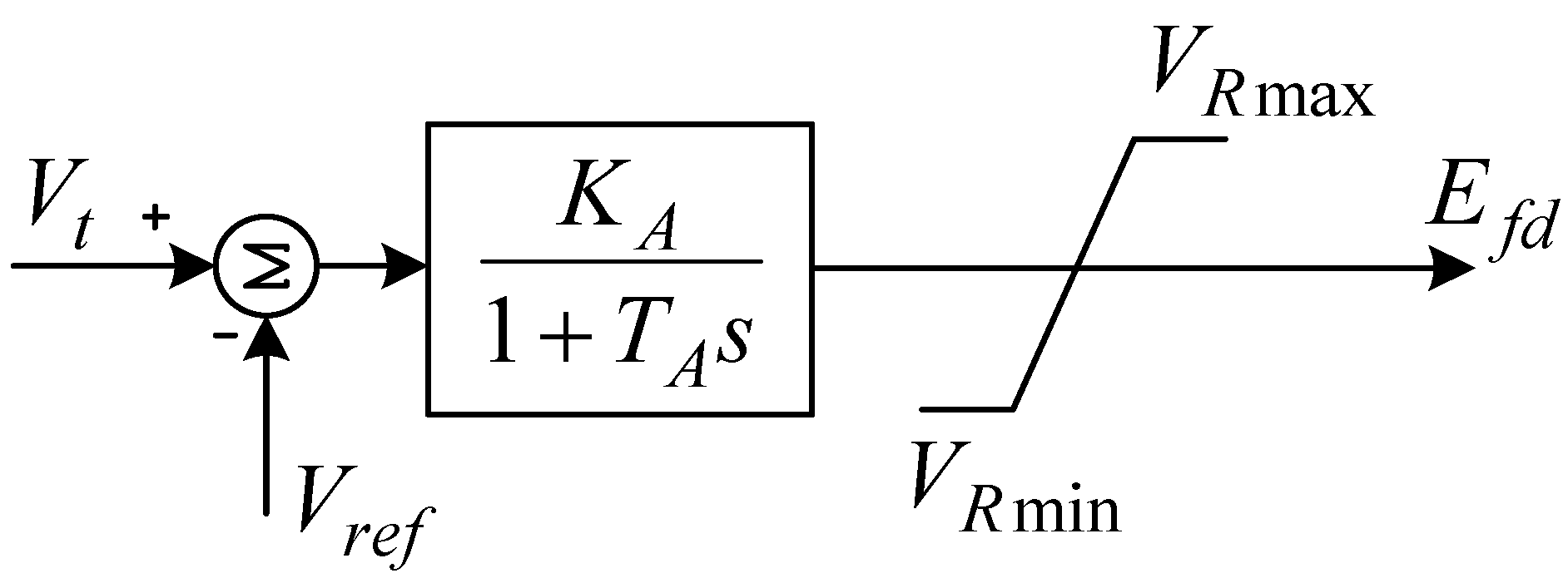
The excitation system (e.g., AVR) model is required for power system oscillatory stability analysis. An excitation system is used to regulate the generator output variables, such as voltage, power factor, and also can be used to integrate power system stabilizer (PSS). The variables are set by setting the field flux on the generator. In this research, a fast exciter system is considered. The mathematical representation of the fast exciter can be described by Equation (2).
In Equation (2),
KA and
TA are the gain constant and time delay constant, respectively. Furthermore, the output of the exciter is limited by the saturation block, as shown in
Figure 1 [
20]. The parameters of the fast excitation system are taken from [
19,
20], and the references therein.
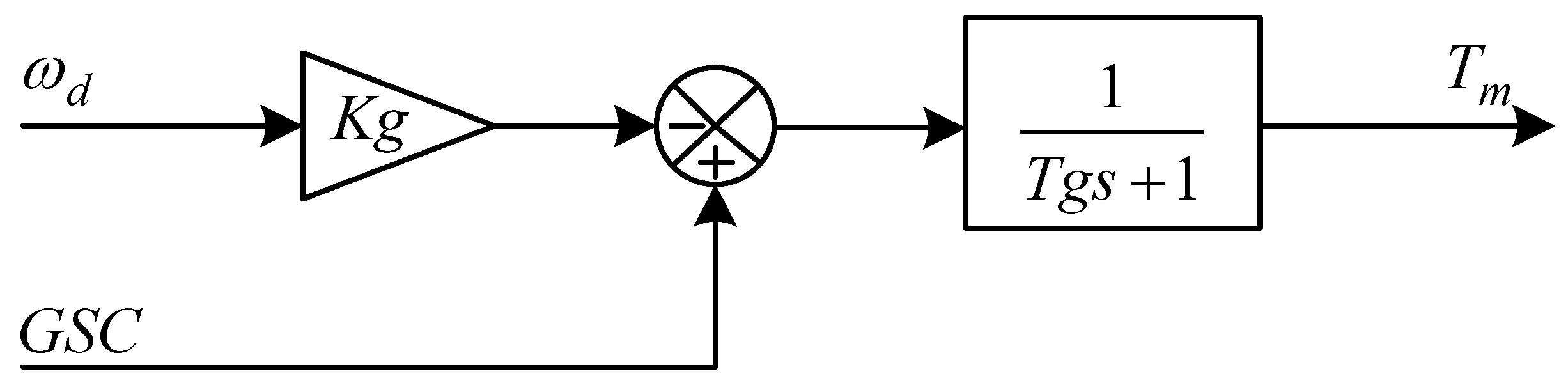
The mechanical torque of the generator depends on the speed droop constant, the time constant of the governor, and the energy source. If there is a change in the generator rotation, the governor will provide feedback to achieve a new speed (new condition). In this research, the governor has been modeled as a first-order differential equation with a gain constant, as shown in
Figure 2. The first-order governor model is sufficient enough for the oscillatory stability studies due to the slow time-scale operation of the governor system [
19,
20]. The initial governor parameters are taken from the [
19] and the references therein.
In this model, the GSC value is zero and the effect of the combination of turbine system and speed governor produces mechanical power which can be described in Equation (3). In Equation (3),
Kg and
Tg are gain constant and time constant of the governor [
20].
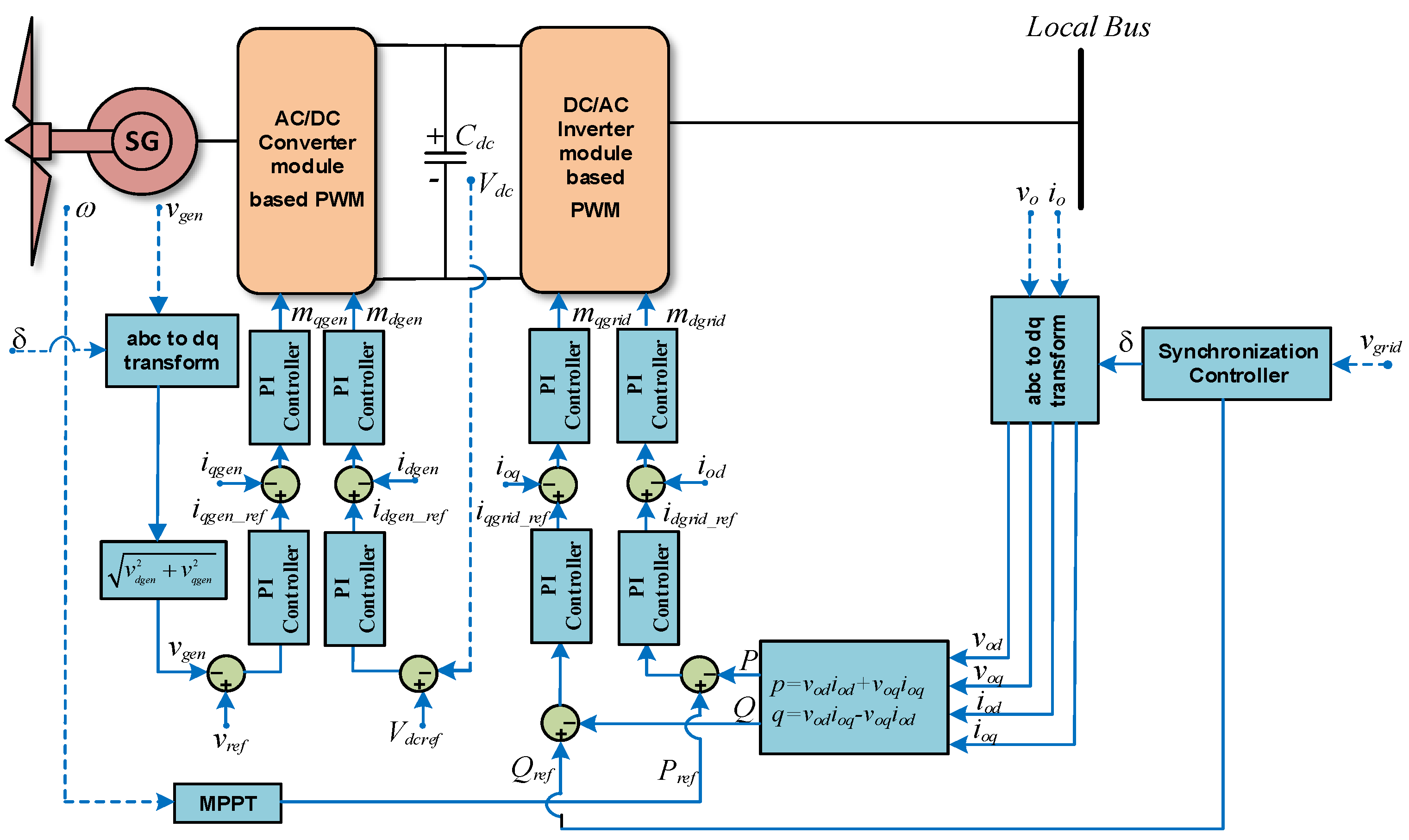
2.2. Dynamic Model of WECS
The permanent magnet synchronous generator (PMSG) based wind energy conversion systems (WECS) are considered in this work. The schematic diagram, which includes the PMSG, wind turbine, converter, associated controllers given in
Figure 3, is used for the simulation. The power output as a function of wind velocity can be expressed as Equation (4).
In Equation (4),
represents the power available from the wind,
is the power coefficient,
A presents the rotor swept area of the wind turbine, while,
and
represent the air density, and upstream wind speed in the rotor, respectively. The aerodynamic mechanical torque
associated with the wind turbine can be obtained as Equation (5) [
21].
In Equation (5),
presents the rotor speed. For this work, the WECS system without a gearbox has been considered. Therefore, no gearbox model has been developed. Hence, the values of aerodynamic and mechanical torque transmitted to the generator are considered to be the same. Furthermore, the power coefficient of the wind turbine can be expressed by the blade pitch angle and the tip-speed ratio. The power coefficient can be expressed as in Equation (6).
In Equation (6),
are the coefficient,
x represents the function related to the wind turbine rotor, and
is the constant term. The values of
and
x are obtained from Equation (7) [
21].
In Equation (7),
represents the pitch angle,
is the tip ratio. The tip ratio
can be estimated as Equation (8) [
21].
The power train model of WECS is required for oscillatory stability studies. The power train model consists of the rotor shaft, generator, blade pitching, and hub with a blade. The power train model used in this paper can be expressed as Equation (9).
In Equation (9),
is the mechanical speed of the generator,
denotes the damping coefficient, aerodynamic torque is represented by
, equivalent inertia is given by
, and
is the electromechanical torque. Furthermore, the parameter of the generator side is described by sub-index,
g. The comprehensive mathematical model of PMSG can be expressed by Equations (10)–(13) [
21].
In Equations (10)–(13), poles are given by
p,
ωe is the electrical speed, stator resistance is denoted by
Rs,
Ld, and
Lq are the generator inductances,
ψf is the magnetic flux, and
Lid are
Liq the leakage inductances. Moreover, the electromechanical torque as given in Equation (14) is also employed in the PMSG model [
22].
The generator side AC/DC converter incorporates the outer and inner controllers. The outer control loop measured the terminal voltage, DC link voltage and compared those measured signals with their reference values. The signal errors are then synthesized using the conventional PI controller to derive reference values of
d-axis and
q-axis currents. By considering
and
as auxiliary state variables of the outer control loop of the generator side converter, state equations of the controller can be stated as in Equation (15) [
23].
The
d-axis and
q-axis reference currents in the generator side can be expressed as Equations (16) and (17).
Output variables from the outer control loop are then fed into the inner current control loop as reference values and compared with the actual values of generator currents
. Auxiliary state variables of
and
are used to express the state equations of the inner current controllers and expressed as in Equation (18).
A similar method is implemented to the current control loop to determine the modulation indices
for the generator-side converter. These modulation indices are afterward employed as control variables for the PWM scheme of the converter. Furthermore, the algebraic equations of modulation indices reference signal can be obtained as in Equations (19) and (20) [
23]:
Similar to the generator-side control, the grid-side inverter control of WECS consists of outer and inner control loops. The active and reactive power reference values are compared to the measured active and reactive output power in the outer loop. State equations of grid side outer control loop can be derived by considering
and
as auxiliary state variables as in Equation (21).
The obtained error from the outer control loop is then regulated by PI controllers, yield the reference values for the inner current control loop as follows:
Moreover, the inner current control loop generated modulation indices
to provide the switching signal for the grid side inverter. Auxiliary state variables of
and
are required to provide state equations of the inner current control loops as given in Equation (24).
The algebraic equations of the reference signal for modulation indices of the grid-side inverter are given by Equations (25) and (26) [
23].
2.3. Dynamic Model of PV Generation
The transmission level PV generator model has been used in this paper. The generic model of the PV, developed by NERC, WECC, and IEEE Task Force, has been used in this study. Based on the NERC’s special report, the PV model can be consisting of the grid-side converter and control model of the type-4 wind turbine.
Figure 4 shows the dynamic model of a transmission level PV system [
24]. The figure shows that the power order has been used to represent the generation of PV array power.
The first-order transfer function with unity gain has been considered to represent the converter dynamics. This facilitates the current injection into the network with respect to the electrical controller’s active and reactive power command. The active power order to the system depends on the model’s power order (
PPV), while the reactive power generation depends on the comparative signal generation from the reactive power control loop (e.g.,
q-axis loop). Three different reactive controls can be implemented in the PV system (e.g., voltage control, power factor, reactive power control) and can be interchangeable based on the flag settings in the controller [
24].
The controller is comprised of PI reactive power control and converter current limits. The MPPT of PV embraces the logic algorithm to track the maximum power of the PV array. Hence, the MPPT can be neglected due to the no dynamics. The detailed presentation of the PV plant for the electromechanical time-frame analysis including the dynamic parameters can be found in [
24].
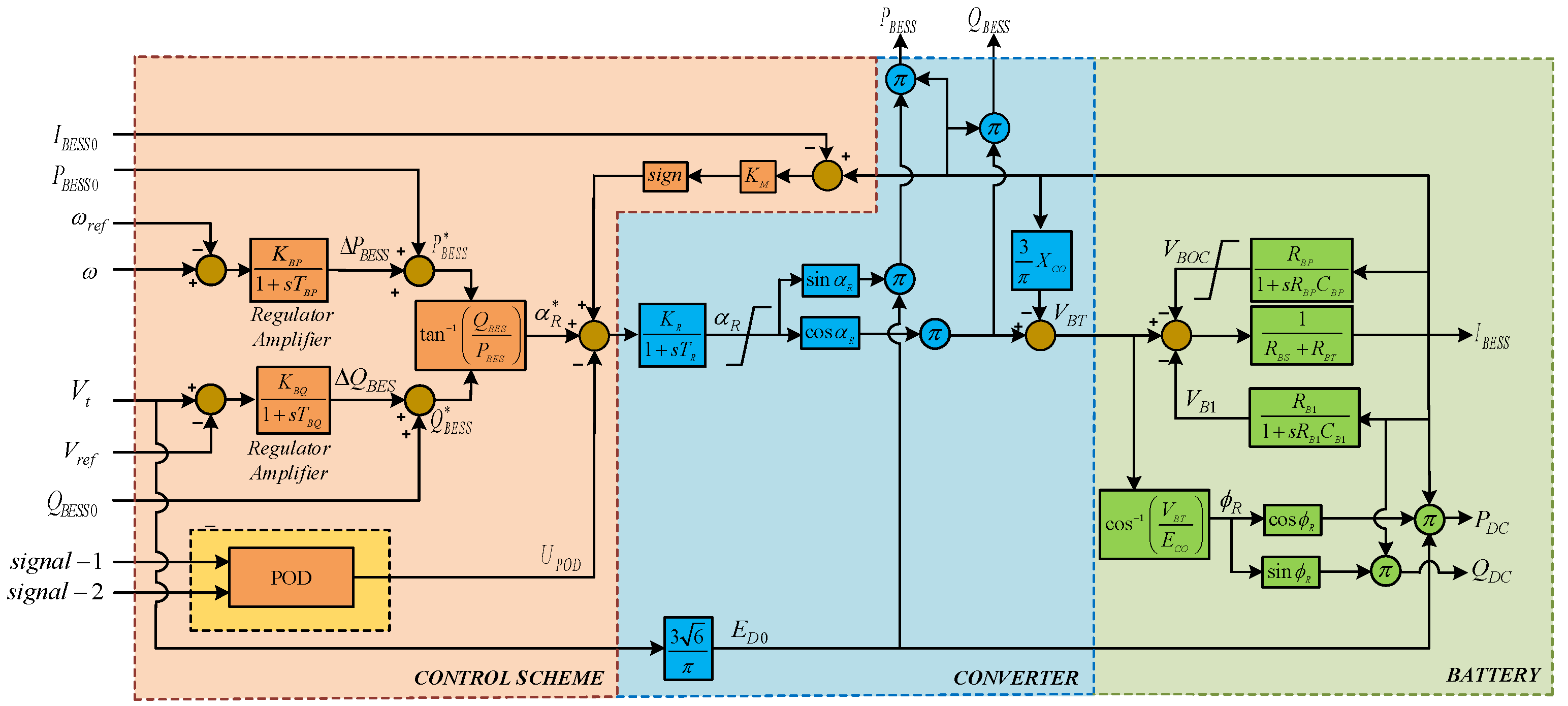
2.4. Dynamic Model of Virtual Synchronous Machine
The battery energy storage system (BESS) including virtual inertia controller is used in this paper to represent the VISMA. The BESS model consists of a second-order model with battery cells. This also includes a first-order model of converter dynamics, and a second-order model of active and reactive power control.
The active and reactive power control signal of a BESS can be obtained as Equations (27) and (28) [
25].
In Equations (27) and (28),
KBP represents the control loop gain and
TBP is the time constant of the active power loop. The
KBQ is the reactive power loop gain and
TBQ is the time constant of the reactive power controller. The converter dynamic can be obtained as Equations (29) and (30) [
25].
In Equations (29) and (30),
KR denotes the gain of the converter and
TR is the time delay associated with the firing angle, while,
KM and
IBESS are used to stabilize the BESS during the constant current operation so that the BESS could able to release more power from the battery banks. Moreover,
and
are active and reactive power output of the converter controller. Furthermore, the battery cell dynamics are also required for this study. The dynamics model of the battery cell can be obtained as Equations (31)–(33) [
25].
In Equations (31)–(33),
RBP and
CBP are the self-discharging resistance and capacitance of the battery, while
RB1 and
CB1 represent the energy and voltage in charging and discharging. Moreover,
VBOC and
VB1 represent the open-circuit voltage and overvoltage of the battery, respectively. Furthermore,
VBT,
RBS, and
RBT are the terminal voltage, the series resistance of the battery, and the equivalent resistance (e.g., parallel/series connection) of batteries.
Figure 5 shows the block diagram of the BESS dynamic model used for the simulation. This is a fifth-order model of battery with converter and the controller. It should be worth noting that the given fifth-order model of battery also consists of POD to compare the proposed VISMA with respect to the auxiliary damping control in the BESS for oscillation damping. To make the BESS operate as VISMA, an additional control scheme has been added.
Figure 6 shows the dynamic model of the virtual inertia controller [
26]. The input of this controller is a frequency deviation, while the output of this controller is a reference signal of the converter.


 ,
, 

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
















