
Energy Management Strategy for Hybrid Multimode Powertrains: Influence of Inertial Properties and Road Inclination





Abstract
:1. Introduction
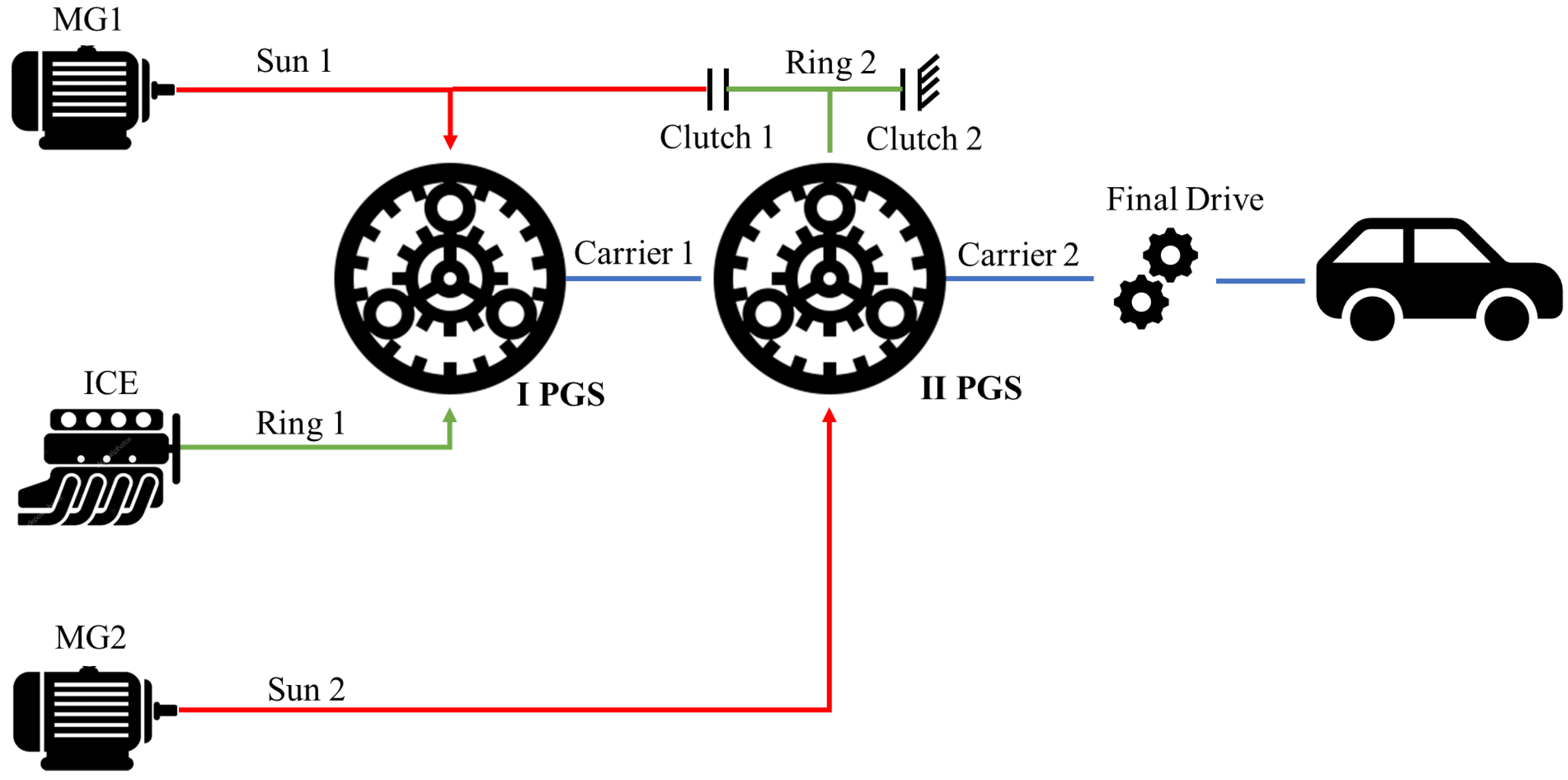
2. Multimode Hybrid Powertrain Model
2.1. Mathematical Model
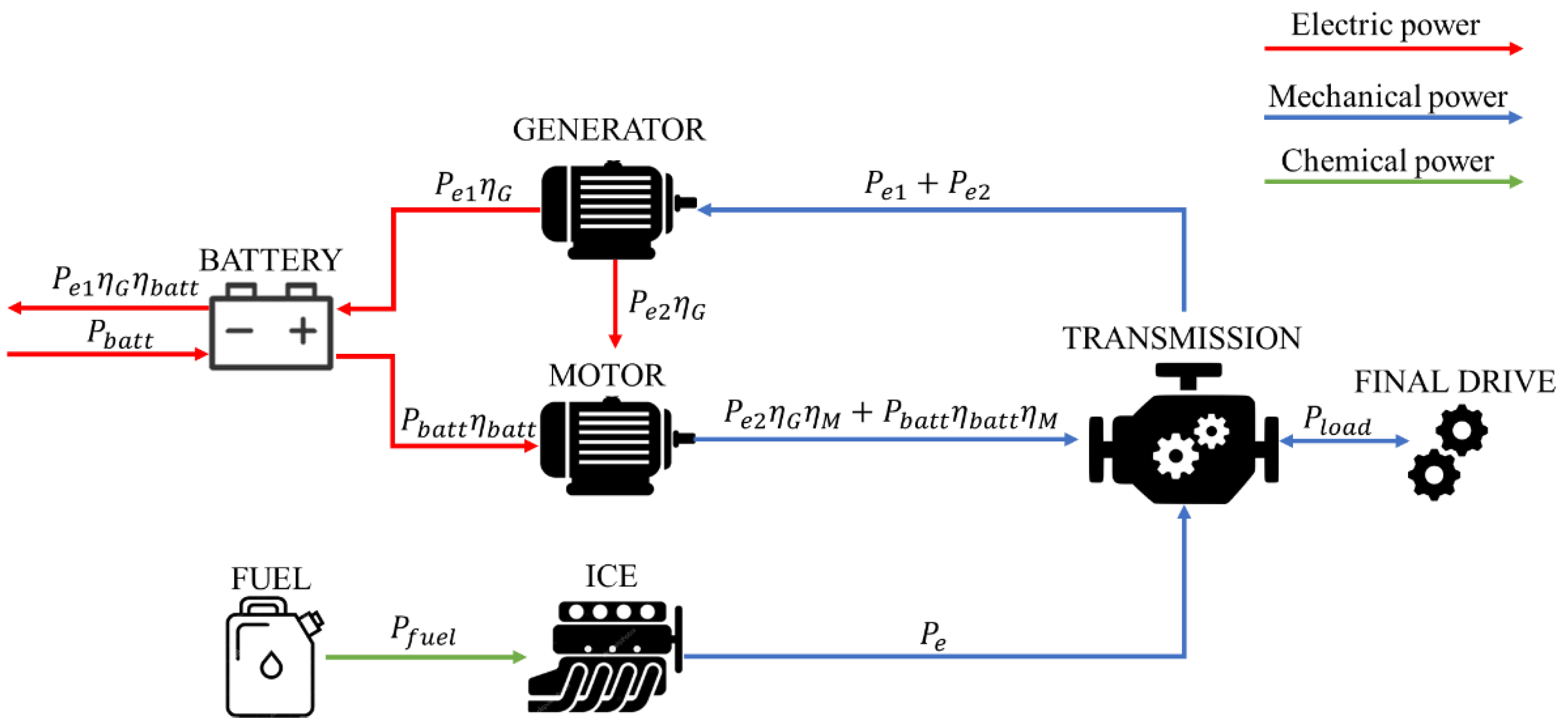
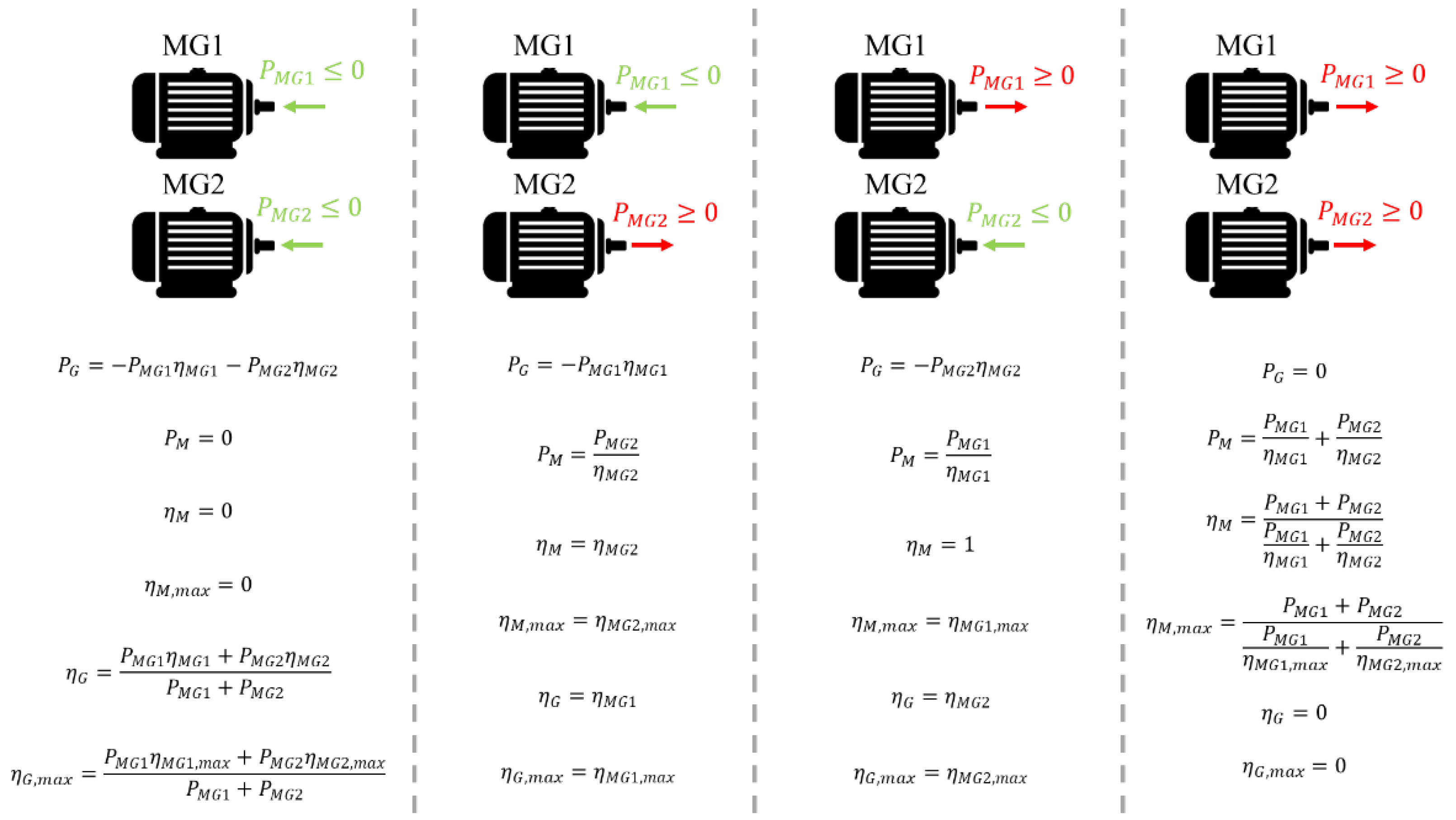
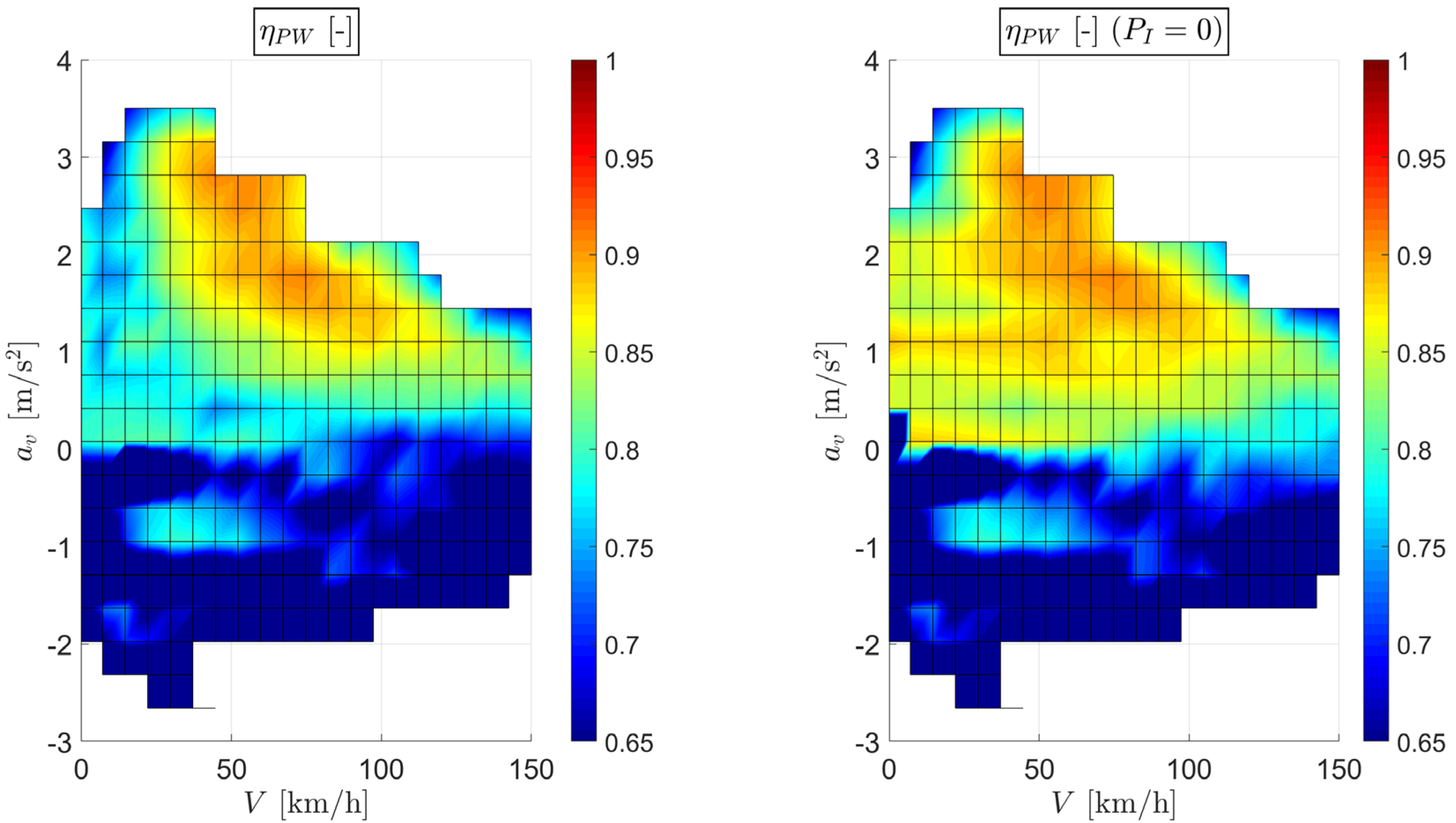
2.2. Power-Weighted Efficiency
3. Simulation Results
- Selection of a longitudinal road slope (first boundary condition);
- Definition of an operating map among the whole set of admissible vehicle speed and acceleration (second and third boundary conditions);
- Calculation of transmission output angular speed and acceleration ;
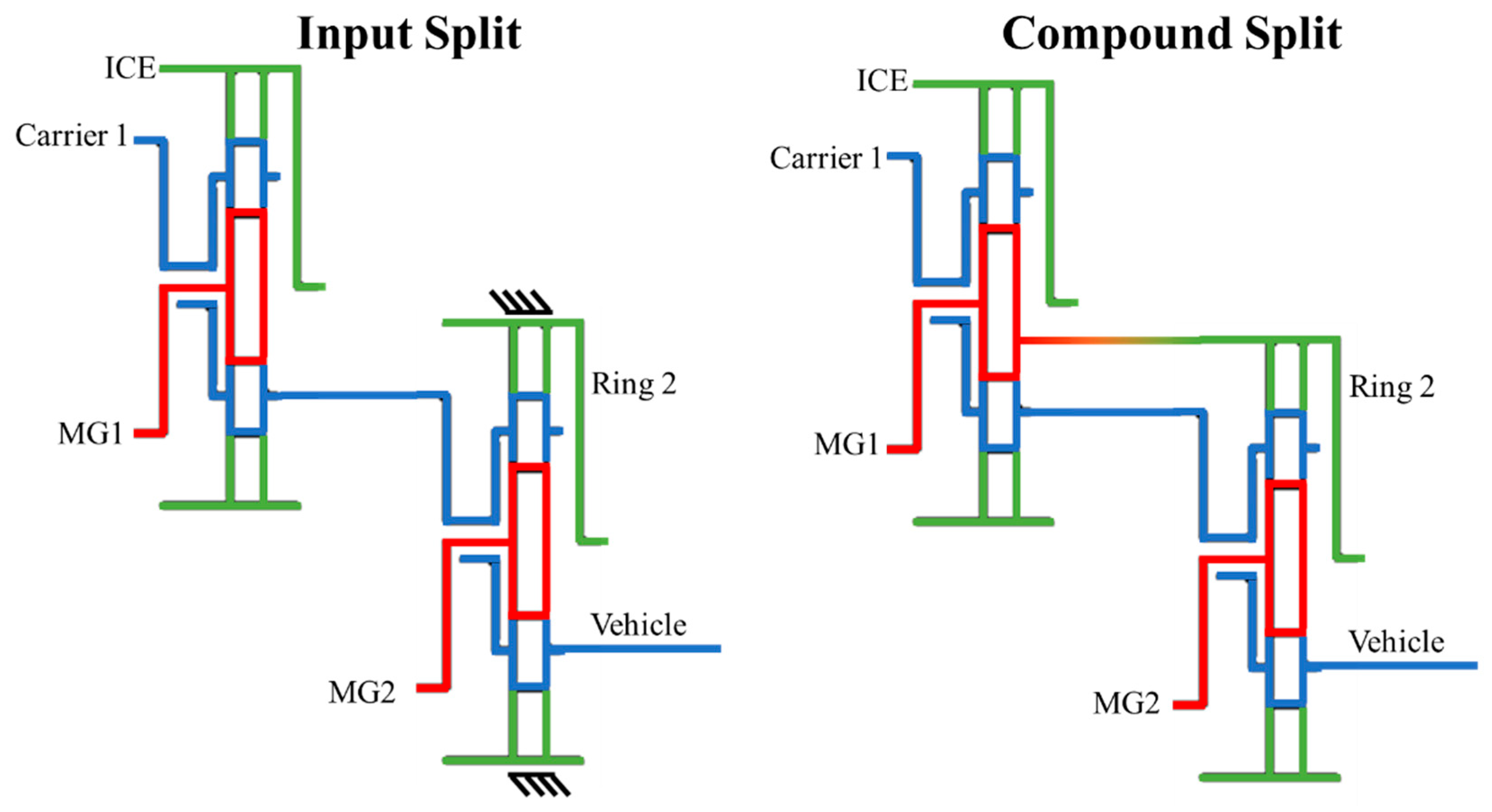
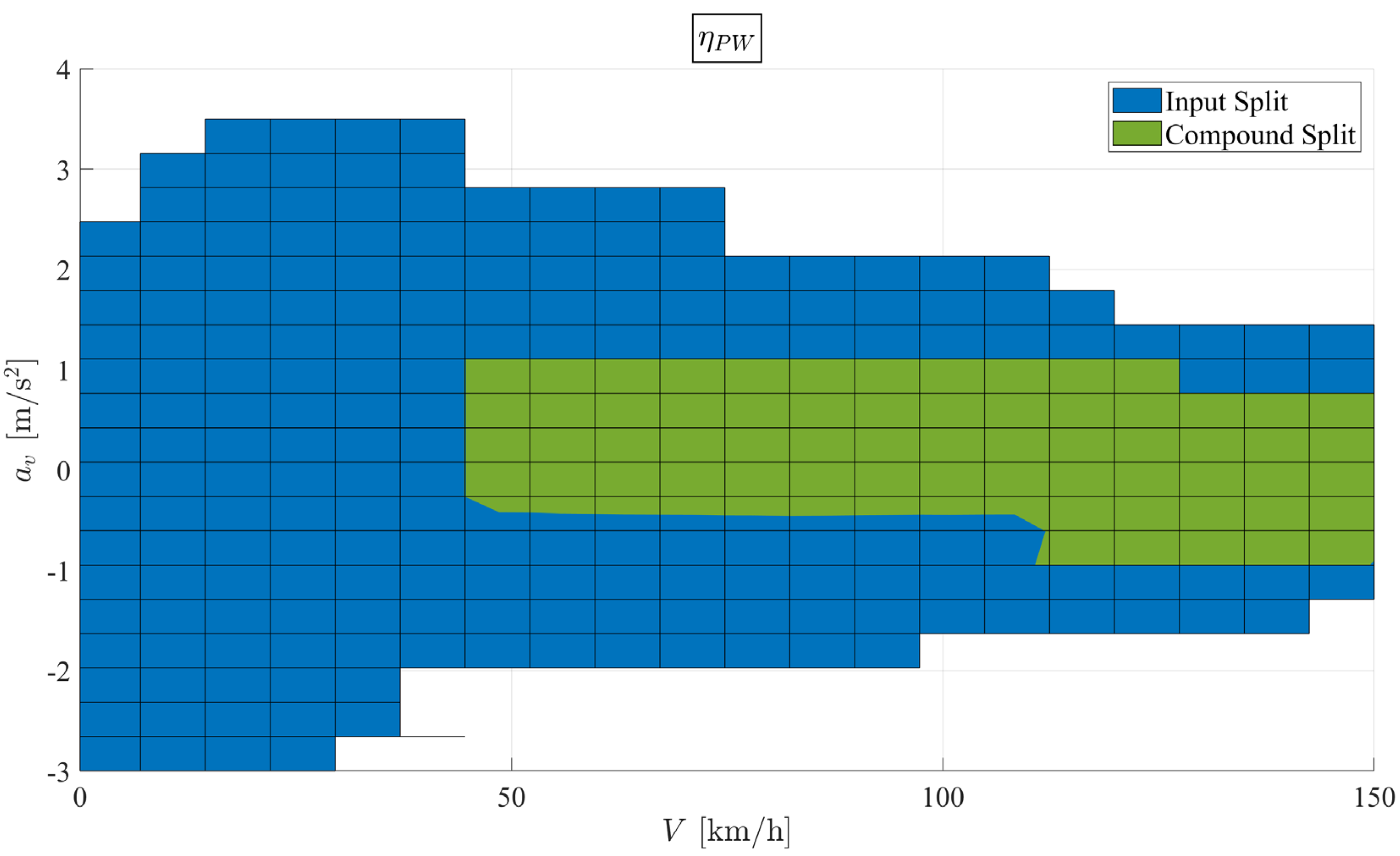
- For 2 dofs powertrain configurations, such as the Input Split and the Compound Split modes, the angular speed of one actuator, i.e., the ICE speed , is also varied within its admissible range;
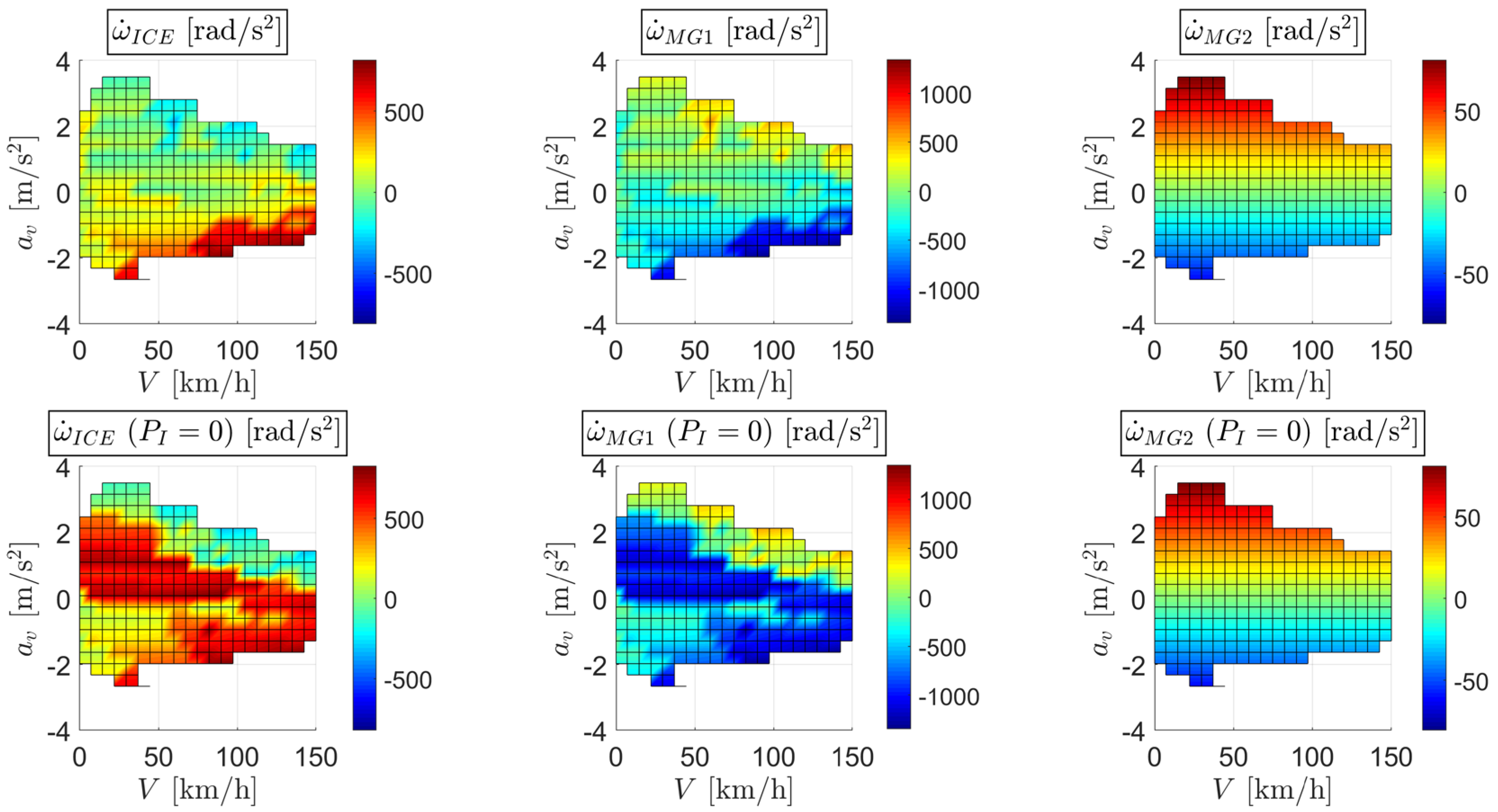
- The angular velocities of the remaining actuators, i.e., the two MGs angular speeds and , are calculated from the two PGS kinematic relations:
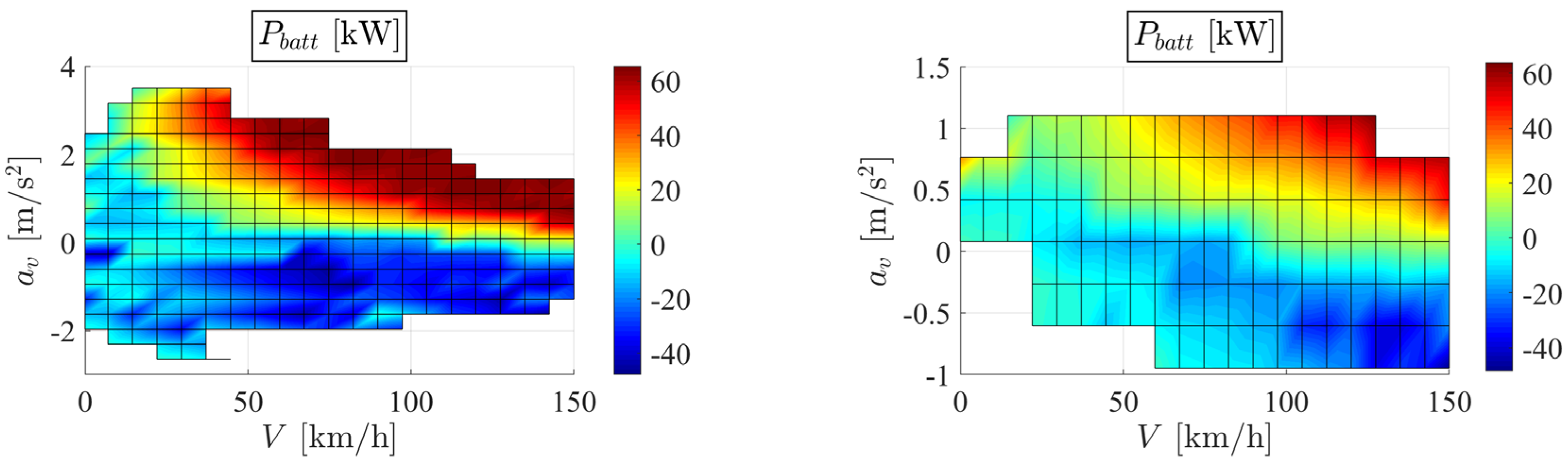
- Evaluation of the transmission output resistance torque :where is the constant tire rolling resistance coefficient, is the gravitational acceleration, is the air density, is the aerodynamic drag coefficient, the vehicle frontal area; It is important to remark that the vehicle braking is only entrusted to the electric generators, thus not considering the presence of a conventional hydraulic braking system (see the results presented by Galvagno et al. [41] for further details about hydraulic braking system modelling).
- For each set of boundary conditions (, , ), there exist infinite solutions for the distribution torque vector , which satisfy Equation (4) (number of actuators larger than the number of dofs). By ranging the two MGs torques, and , between their minimum and maximum values at and , respectively, the system of equations in Equation (4) can be numerically discretized and solved to elaborate the resulting ICE torque and angular acceleration . The angular accelerations of the two MGs, and , are then calculated from and through the PGS kinematic relations in Equation (8). Finally, the procedure computes a discrete number of solutions, identified by a combination of , , and , that satisfy the boundary conditions of road slope, vehicle speed, and acceleration. An admissible solution is accepted, to calculate the output power and efficiency of each actuator, only if the following constraints are satisfied:
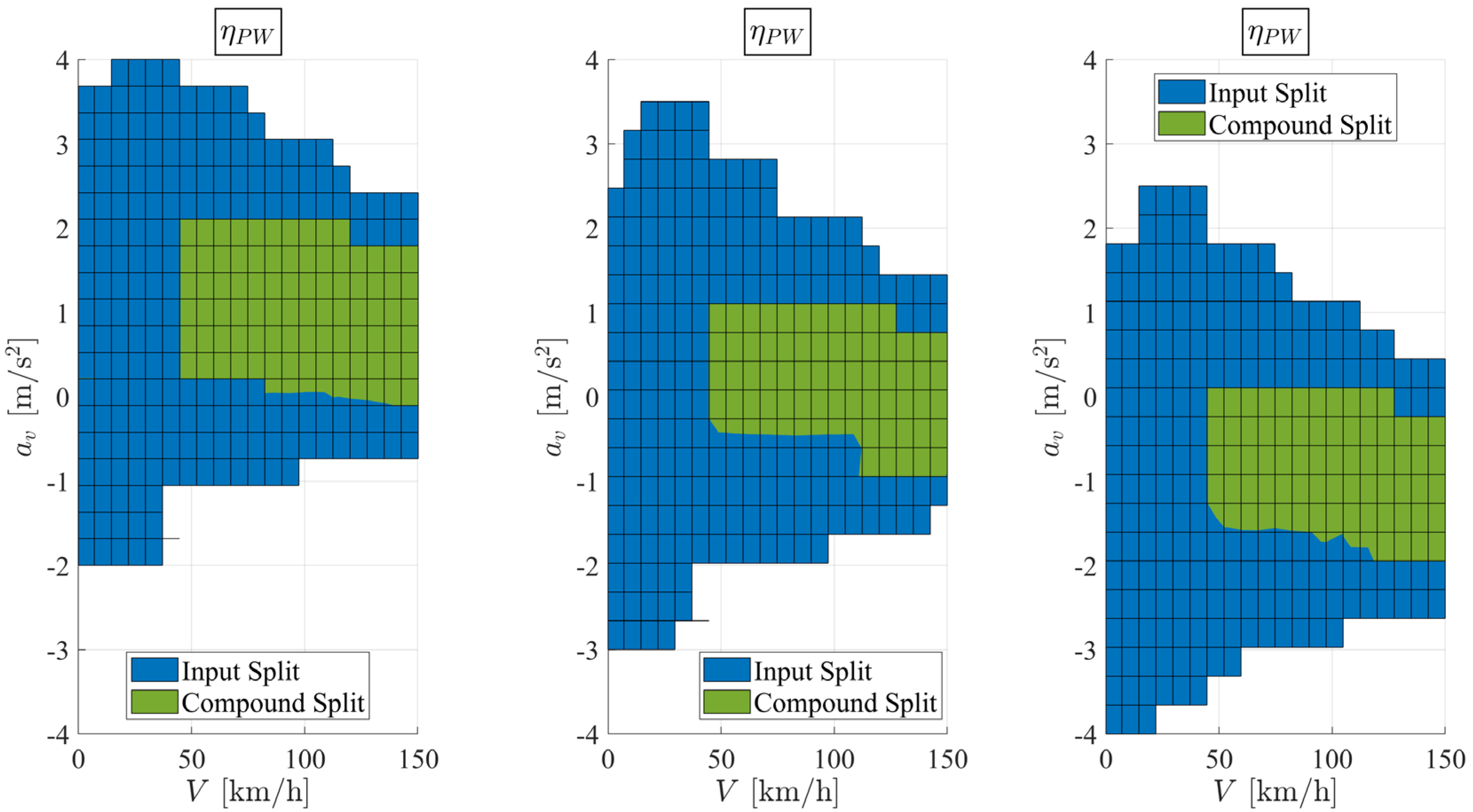
3.1. Powertrain Mode Selection
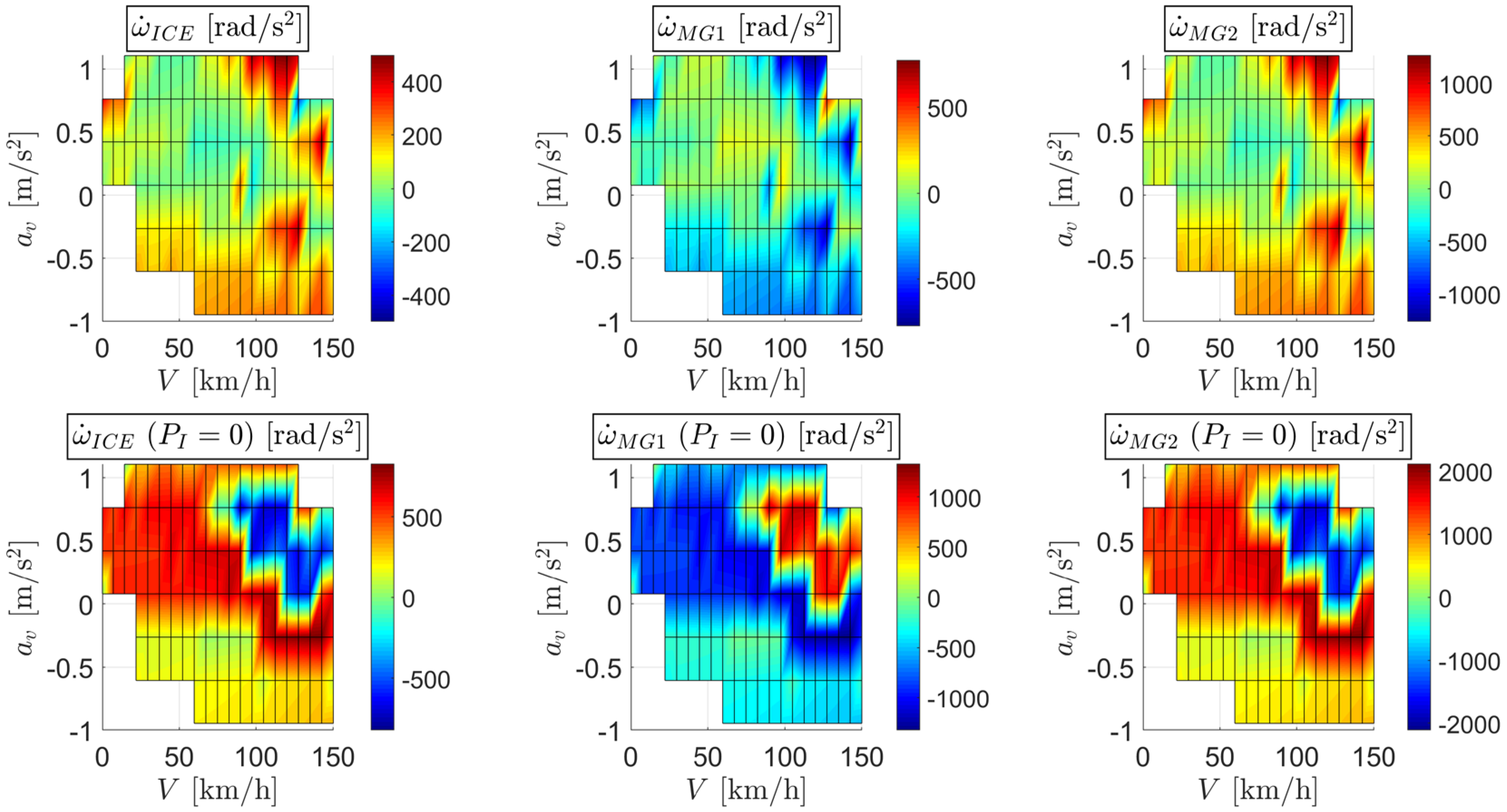
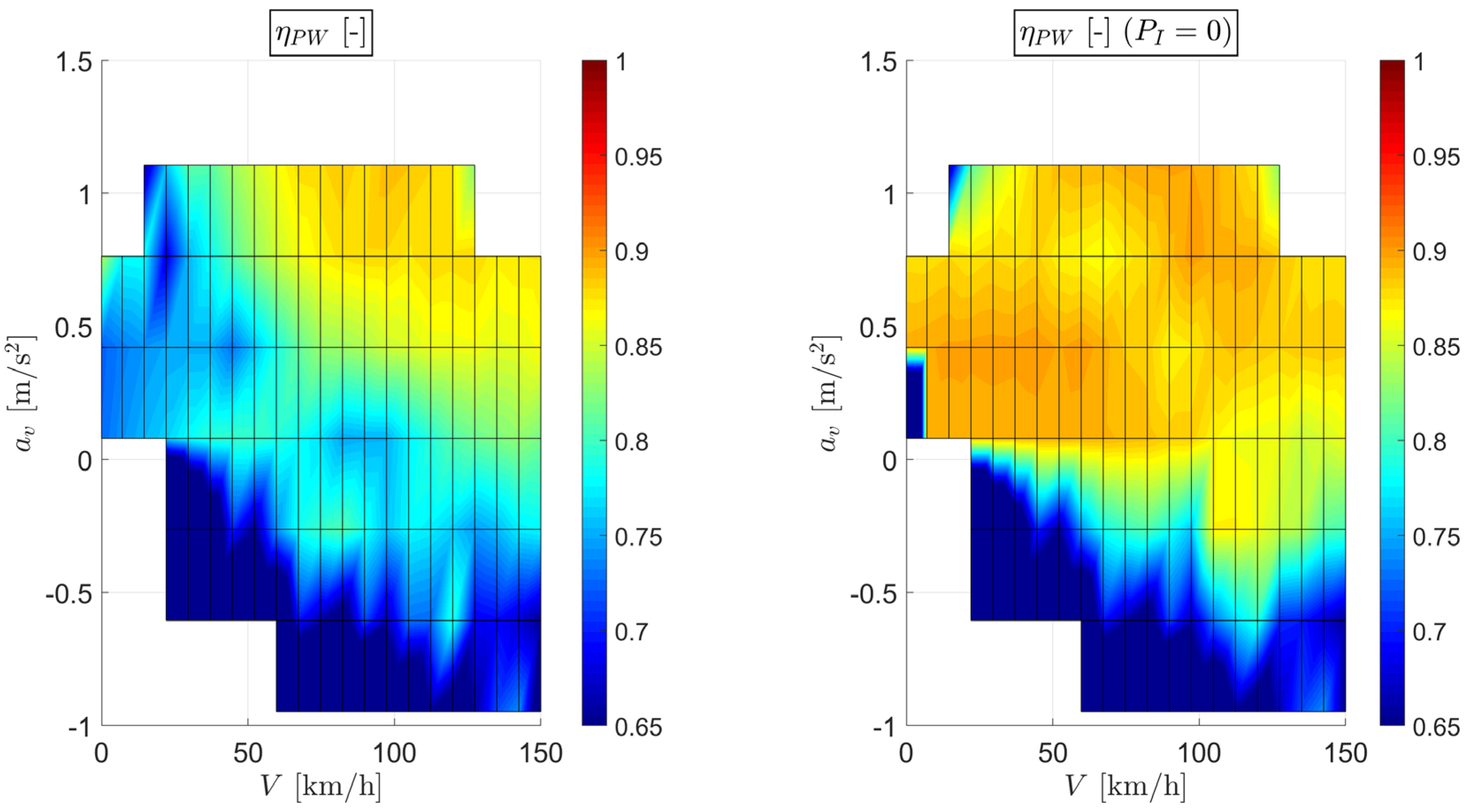
3.2. Effect of the Inertial Penalty Factor
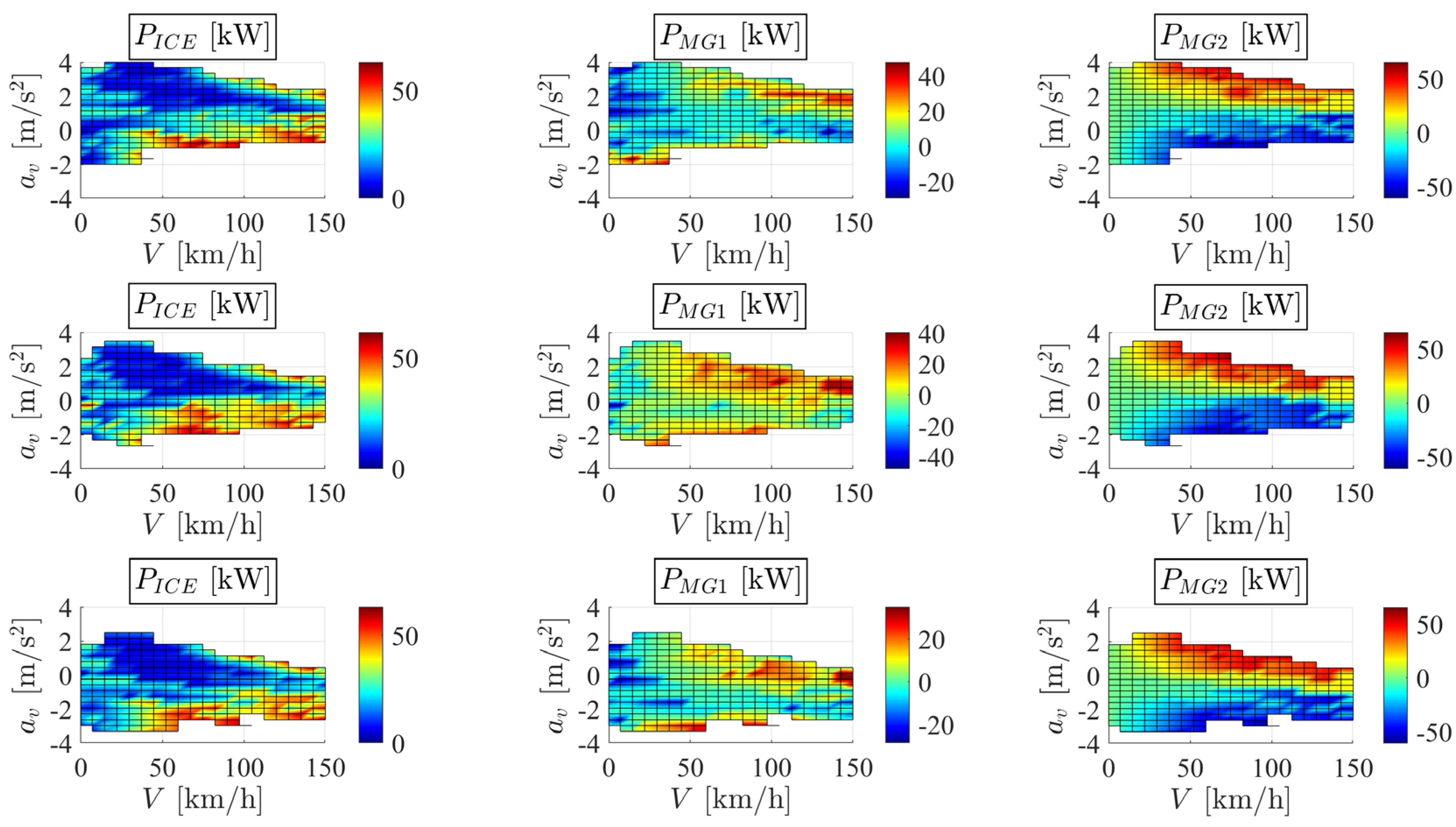
3.3. Road Slope Influence
4. Conclusions
- Hybrid powertrains can be controlled by actuators whose nature is extremely different in terms of efficiency and dynamic characteristics. An energy management strategy relying only on the individual efficiency map of each actuator does not provide a satisfying power distribution, since it limits or completely excludes the actuators with lower maximum efficiency, i.e., the ICE. The power-weighted efficiency provides a unique parameter that normalize the overall efficiency contribution of each actuator based on the power flow requested during a specific vehicle working condition which is not correlated to a specific driving cycle.
- There are multiple solutions, in terms of actuator torque distribution, for a given set of boundary conditions in terms of road slope, vehicle speed, and acceleration. The power-weighted efficiency could represent a valid parameter to discriminate and select the best working map for each actuator that satisfies the minimum energy loss principle. However, this solution would not prevent from undesirable working conditions where part of the power is addressed to accelerate or decelerate one or more powertrain components. Aiming at minimizing the variation of the powertrain kinetic energy, a penalty factor is introduced into the definition of the power-weighted efficiency that always guarantees high efficiency, though slightly lower than the maximum possible value, with a more targeted power flow towards the vehicle and/or the battery.
- This methodology also considers the effect of the road inclination, which modifies the admissible vehicle acceleration range. This approach is able to regulate the operative condition of each actuator and to switch the two electric machine modes between generator and motor, thus taking advantage or compensating the road inclination influence.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Xu, N.; Kong, Y.; Chu, L.; Ju, H.; Yang, Z.; Xu, Z.; Xu, Z. Towards a smarter energy management system for hybrid vehicles: A comprehensive review of control strategies. Appl. Sci. 2019, 9, 2026. [Google Scholar] [CrossRef] [Green Version]
- Jung, H. Fuel economy of plug-in hybrid electric and hybrid electric vehicles: Effects of vehicle weight, hybridization ratio and ambient temperature. World Electr. Veh. J. 2020, 11, 31. [Google Scholar] [CrossRef] [Green Version]
- Tran, D.D.; Vafaeipour, M.; El Baghdadi, M.; Barrero, R.; Van Mierlo, J.; Hegazy, O. Thorough state-of-the-art analysis of electric and hybrid vehicle powertrains: Topologies and integrated energy management strategies. Renew. Sustain. Energy Rev. 2020, 119, 109596. [Google Scholar] [CrossRef]
- Jochem, P.; Babrowski, S.; Fichtner, W. Assessing CO2 emissions of electric vehicles in Germany in 2030. Transp. Res. Part A Policy Pract. 2015, 78, 68–83. [Google Scholar] [CrossRef] [Green Version]
- Burch, I.; Gilchrist, J. Survey of Global Activity to Phase out Internal Combustion Engine Vehicles; Center of Climate Protection: Santa Rosa, CA, USA, 2018. [Google Scholar]
- Cirimele, V.; Dimauro, L.; Repetto, M.; Bonisoli, E. Multi-objective optimisation of a magnetic gear for powertrain applications. Int. J. Appl. Electromagn. Mech. 2019, 60, S25–S34. [Google Scholar] [CrossRef]
- Mi, C.; Masrur, M.A. Hybrid Electric Vehicles: Principles and Applications with Practical Perspectives; John Wiley & Sons: Hoboken, NJ, USA, 2017. [Google Scholar]
- Ehsani, M.; Gao, Y.; Longo, S.; Ebrahimi, K.M. Modern Electric, Hybrid Electric, and Fuel Cell Vehicles; CRC Press: Boca Raton, FL, USA, 2018. [Google Scholar]
- Chan, C.C. The state of the art of electric, hybrid, and fuel cell vehicles. Proc. IEEE 2007, 95, 704–718. [Google Scholar] [CrossRef]
- Johri, R.; Filipi, Z. Optimal energy management of a series hybrid vehicle with combined fuel economy and low-emission objectives. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2014, 228, 1424–1439. [Google Scholar] [CrossRef]
- Dorri, M.; Shamekhi, A.H. Design and optimization of a new control strategy in a parallel hybrid electric vehicle in order to improve fuel economy. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2011, 225, 747–759. [Google Scholar] [CrossRef]
- Bole, B.; Coogan, S.; Cubero-Ponce, C.; Edwards, D.; Melsert, R.; Taylor, D. Energy management control of a hybrid electric vehicle with two-mode electrically variable transmission. In Proceedings of the EVS26 International Battery, Hybrid and Fuel Cell Electric Vehicle Symposium, Los Angeles, CA, USA, 6–9 May 2012. [Google Scholar]
- Galvagno, E.; Vigliani, A.; Velardocchia, M. Transient response and frequency domain analysis of an electrically variable transmission. Adv. Mech. Eng. 2018, 10, 1687814018776182. [Google Scholar] [CrossRef]
- Zhang, X.; Peng, H.; Sun, J. A near-optimal power management strategy for rapid component sizing of multimode power split hybrid vehicles. IEEE Trans. Control Syst. Technol. 2014, 23, 609–618. [Google Scholar] [CrossRef]
- Zhang, X.; Eben Li, S.; Peng, H.; Sun, J. Efficient exhaustive search of power-split hybrid powertrains with multiple planetary gears and clutches. J. Dyn. Syst. Meas. Control 2015, 137, 121006. [Google Scholar] [CrossRef]
- Zhuang, W.; Zhang, X.; Ding, Y.; Wang, L.; Hu, X. Comparison of multi-mode hybrid powertrains with multiple planetary gears. Appl. Energy 2016, 178, 624–632. [Google Scholar] [CrossRef]
- Serrao, L.; Onori, S.; Rizzoni, G. A comparative analysis of energy management strategies for hybrid electric vehicles. J. Dyn. Syst. Meas. Control 2011, 133, 031012. [Google Scholar] [CrossRef] [Green Version]
- Lee, H.; Song, C.; Kim, N.; Cha, S.W. Comparative analysis of energy management strategies for HEV: Dynamic programming and reinforcement learning. IEEE Access 2020, 8, 67112–67123. [Google Scholar] [CrossRef]
- Hofman, T.; Steinbuch, M.; Van Druten, R.; Serrarens, A. Rule-based energy management strategies for hybrid vehicles. Int. J. Electr. Hybrid Veh. 2007, 1, 71–94. [Google Scholar] [CrossRef]
- Sorrentino, M.; Rizzo, G.; Arsie, I. Analysis of a rule-based control strategy for on-board energy management of series hybrid vehicles. Control Eng. Pract. 2011, 19, 1433–1441. [Google Scholar] [CrossRef]
- Guercioni, G.R.; Galvagno, E.; Tota, A.; Vigliani, A. Adaptive Equivalent Consumption Minimization Strategy With Rule-Based Gear Selection for the Energy Management of Hybrid Electric Vehicles Equipped with Dual Clutch Transmissions. IEEE Access 2020, 8, 190017–190038. [Google Scholar] [CrossRef]
- Sciarretta, A.; Back, M.; Guzzella, L. Optimal control of parallel hybrid electric vehicles. IEEE Trans. Control Syst. Technol. 2004, 12, 352–363. [Google Scholar] [CrossRef]
- Huang, Y.; Wang, H.; Khajepour, A.; He, H.; Ji, J. Model predictive control power management strategies for HEVs: A review. J. Power Sources 2017, 341, 91–106. [Google Scholar] [CrossRef]
- Li, X.; Han, L.; Liu, H.; Wang, W.; Xiang, C. Real-time optimal energy management strategy for a dual-mode power-split hybrid electric vehicle based on an explicit model predictive control algorithm. Energy 2019, 172, 1161–1178. [Google Scholar] [CrossRef]
- Xie, S.; Hu, X.; Qi, S.; Tang, X.; Lang, K.; Xin, Z.; Brighton, J. Model predictive energy management for plug-in hybrid electric vehicles considering optimal battery depth of discharge. Energy 2019, 173, 667–678. [Google Scholar] [CrossRef]
- Li, J.; Zhou, Q.; He, Y.; Shuai, B.; Li, Z.; Williams, H.; Xu, H. Dual-loop online intelligent programming for driver-oriented predict energy management of plug-in hybrid electric vehicles. Appl. Energy 2019, 253, 113617. [Google Scholar] [CrossRef] [Green Version]
- Delprat, S.; Lauber, J.; Guerra, T.M.; Rimaux, J. Control of a parallel hybrid powertrain: Optimal control. IEEE Trans. Veh. Technol. 2004, 53, 872–881. [Google Scholar] [CrossRef]
- Kim, N.; Cha, S.; Peng, H. Optimal control of hybrid electric vehicles based on Pontryagin’s minimum principle. IEEE Trans. Control Syst. Technol. 2010, 19, 1279–1287. [Google Scholar]
- Galvagno, E.; Guercioni, G.; Rizzoni, G.; Velardocchia, M.; Vigliani, A. Effect of engine start and clutch slip losses on the energy management problem of a hybrid DCT powertrain. Int. J. Automot. Technol. 2020, 21, 953–969. [Google Scholar] [CrossRef]
- Guercioni, G.R.; Vigliani, A. Gearshift control strategies for hybrid electric vehicles: A comparison of powertrains equipped with automated manual transmissions and dual-clutch transmissions. Proc. IMechE Part D J. Automob. Eng. 2019, 233, 2761–2779. [Google Scholar] [CrossRef]
- Finesso, R.; Misul, D.; Spessa, E.; Venditti, M. Optimal design of power-split hevs based on total cost of ownership and CO2 emission minimization. Energies 2018, 11, 1705. [Google Scholar] [CrossRef] [Green Version]
- Chen, Z.; Mi, C.C.; Xiong, R.; Xu, J.; You, C. Energy management of a power-split plug-in hybrid electric vehicle based on genetic algorithm and quadratic programming. J. Power Sources 2014, 248, 416–426. [Google Scholar] [CrossRef]
- Zhang, X.; Peng, H.; Sun, J. A near-optimal power management strategy for rapid component sizing of power split hybrid vehicles with multiple operating modes. In 2013 American Control Conference; IEEE: Washington, DC, USA, 2013; pp. 5972–5977. [Google Scholar]
- Grewe, T.M.; Conlon, B.M.; Holmes, A.G. Defining the General Motors 2-Mode Hybrid Transmission (No. 2007-01-0273); SAE Technical Paper; SAE World Congress & Exhibition: Warrendale, PA, USA, 2007. [Google Scholar]
- Tinelli, V.; Galvagno, E.; Velardocchia, M. Dynamic Analysis and Control of a Dual Mode Electrically Variable Transmission. In IFToMM World Congress on Mechanism and Machine Science; Springer: Cham, Switzerland, 2019; pp. 3731–3740. [Google Scholar]
- Tota, A.; Galvagno, E.; Velardocchia, M. On the Power-weighted Efficiency of Multimode Powertrains: A case study on a Two-Mode Hybrid System. In IFToMM and Sustainable Development Goals—Proceedings of the First I4SDG Workshop; Mechanisms and Machine Science; Springer: Cham, Switzerland, 2021; Volume 108. [Google Scholar] [CrossRef]
- Guercioni, G.R.; Galvagno, E.; Tota, A.; Vigliani, A.; Zhao, T. Driveline Backlash and Half-Shaft Torque Estimation for Electric Powertrains Control (No. 2018-01-1345); SAE Technical Paper; SAE World Congress & Exhibition: Warrendale, PA, USA, 2018. [Google Scholar]
- Galvagno, E.; Tota, A.; Velardocchia, M.; Vigliani, A. Enhancing Transmission NVH Performance through Powertrain Control Integration with Active Braking System (No. 2017-01-1778); SAE Technical Paper; SAE World Congress & Exhibition: Warrendale, PA, USA, 2017. [Google Scholar]
- Galvagno, E. Epicyclic gear train dynamics including mesh efficiency. Int. J. Mech. Control 2010, 11, 41–47. [Google Scholar]
- Zhang, Y.; Yuan, X.; Duan, L.; Xu, Y.; Lan, F. Environmental temperature effects on the energy flow of plug-in hybrid electric vehicles. J. Power Sources 2021, 506, 230–231. [Google Scholar] [CrossRef]
- Galvagno, E.; Tota, A.; Vigliani, A.; Velardocchia, M. Pressure following strategy for conventional braking control applied to a HIL test bench. SAE Int. J. Passeng. Cars-Mech. Syst. 2017, 10, 721–727. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| kg | ||
| m | ||
| - | ||
| - | ||
| m2 | ||
| kg/m3 | ||
| - | ||
| m | ||
| kg m2 | ||
| kg m2 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tota, A.; Galvagno, E.; Dimauro, L.; Vigliani, A.; Velardocchia, M. Energy Management Strategy for Hybrid Multimode Powertrains: Influence of Inertial Properties and Road Inclination. Appl. Sci. 2021, 11, 11752. https://doi.org/10.3390/app112411752
Tota A, Galvagno E, Dimauro L, Vigliani A, Velardocchia M. Energy Management Strategy for Hybrid Multimode Powertrains: Influence of Inertial Properties and Road Inclination. Applied Sciences. 2021; 11(24):11752. https://doi.org/10.3390/app112411752
Chicago/Turabian StyleTota, Antonio, Enrico Galvagno, Luca Dimauro, Alessandro Vigliani, and Mauro Velardocchia. 2021. "Energy Management Strategy for Hybrid Multimode Powertrains: Influence of Inertial Properties and Road Inclination" Applied Sciences 11, no. 24: 11752. https://doi.org/10.3390/app112411752