
Simplification of Complex Structural Dynamic Models: A Case Study Related to a Cantilever Beam and a Large Mass Attachment

 , and
, and
Abstract
:1. Introduction
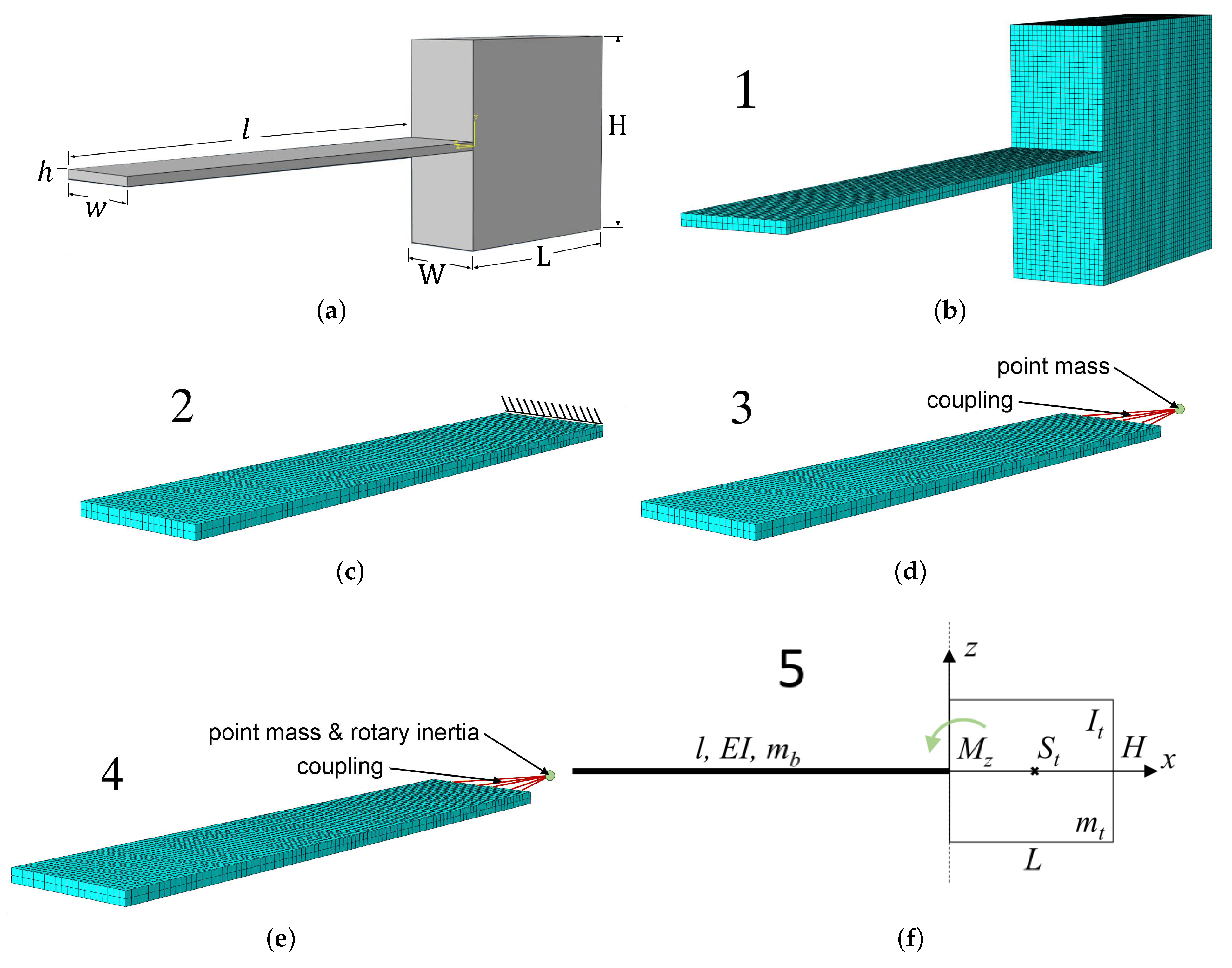
2. Model Descriptions
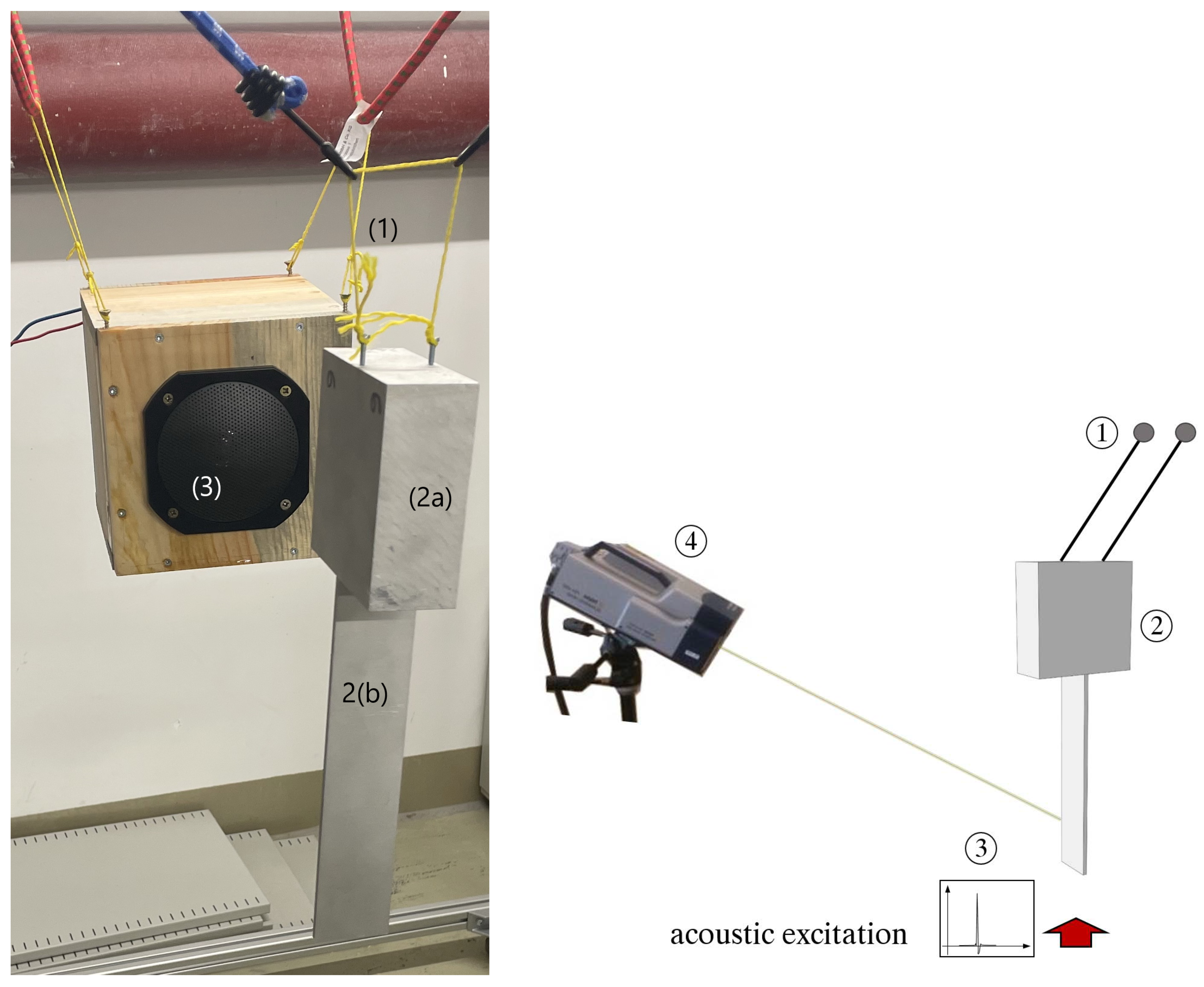
2.1. Test Samples
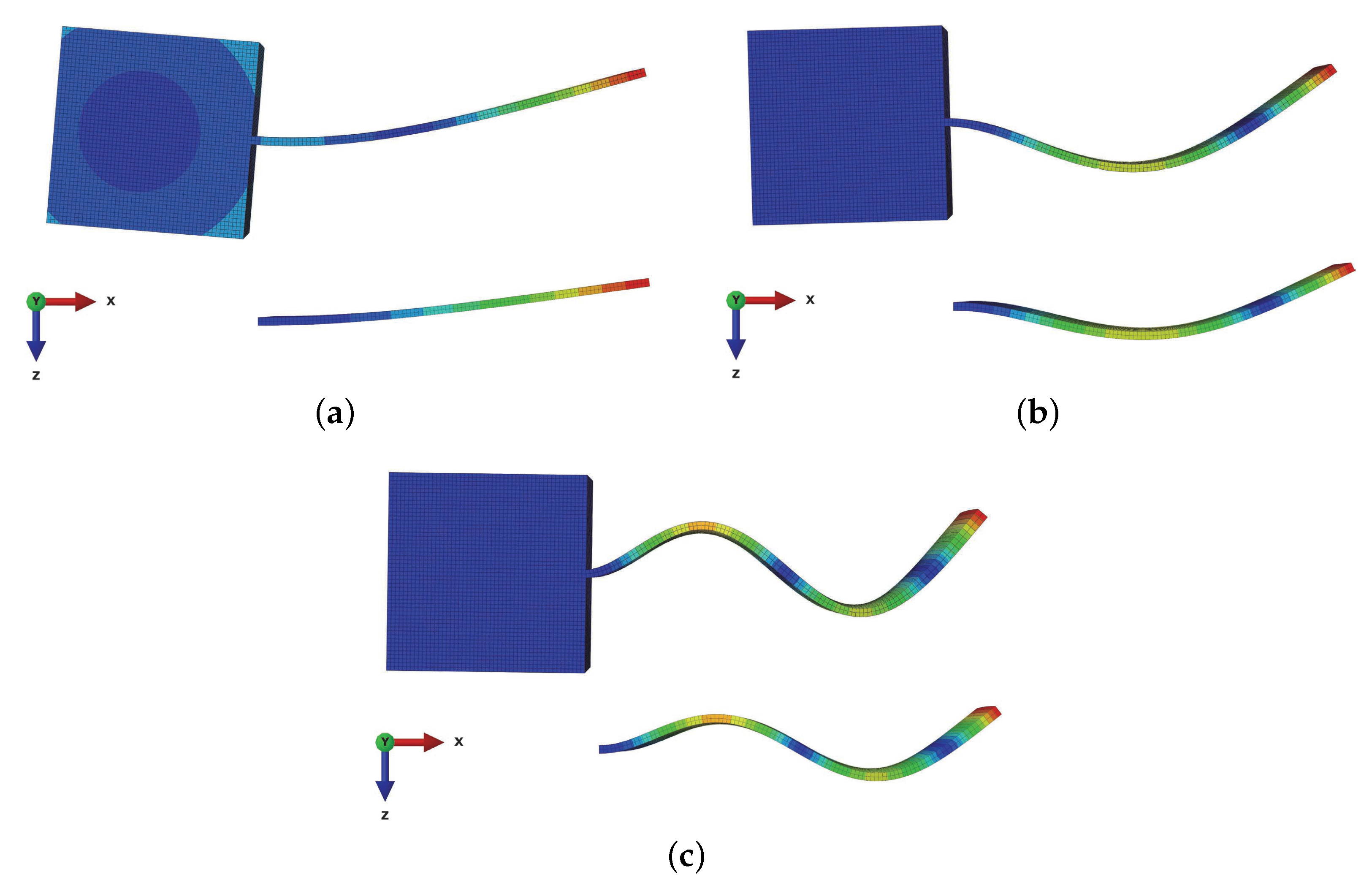
2.2. Finite Element Models
2.3. Experimental Modal Analysis
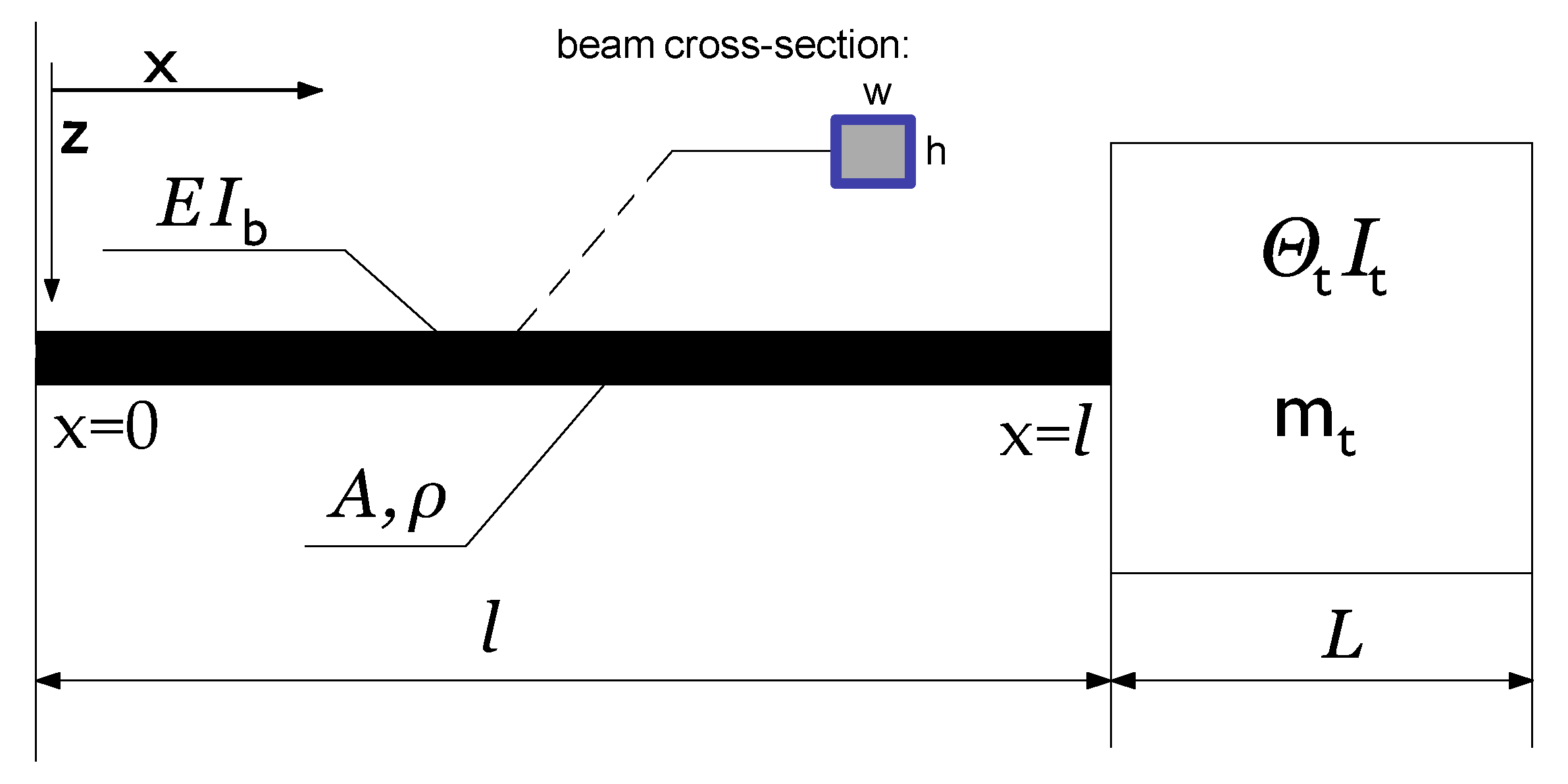
2.4. Analytical Theory
- (i)
- One of the spatial dimensions is significantly larger than the other two.
- (ii)
- The material behaves according to Hooke’s law.
- (iii)
- The Poisson effect is neglected.
- (iv)
- The angle of rotation is small; hence, the small angle assumption holds. The transverse displacements and cross-section rotations are small. Hence, the formulations are geometrically linear.
- (v)
- Cross-sections remain perpendicular to the neutral axes after deformation.
- (vi)
- The rotational inertia of the cross-sections is neglected.
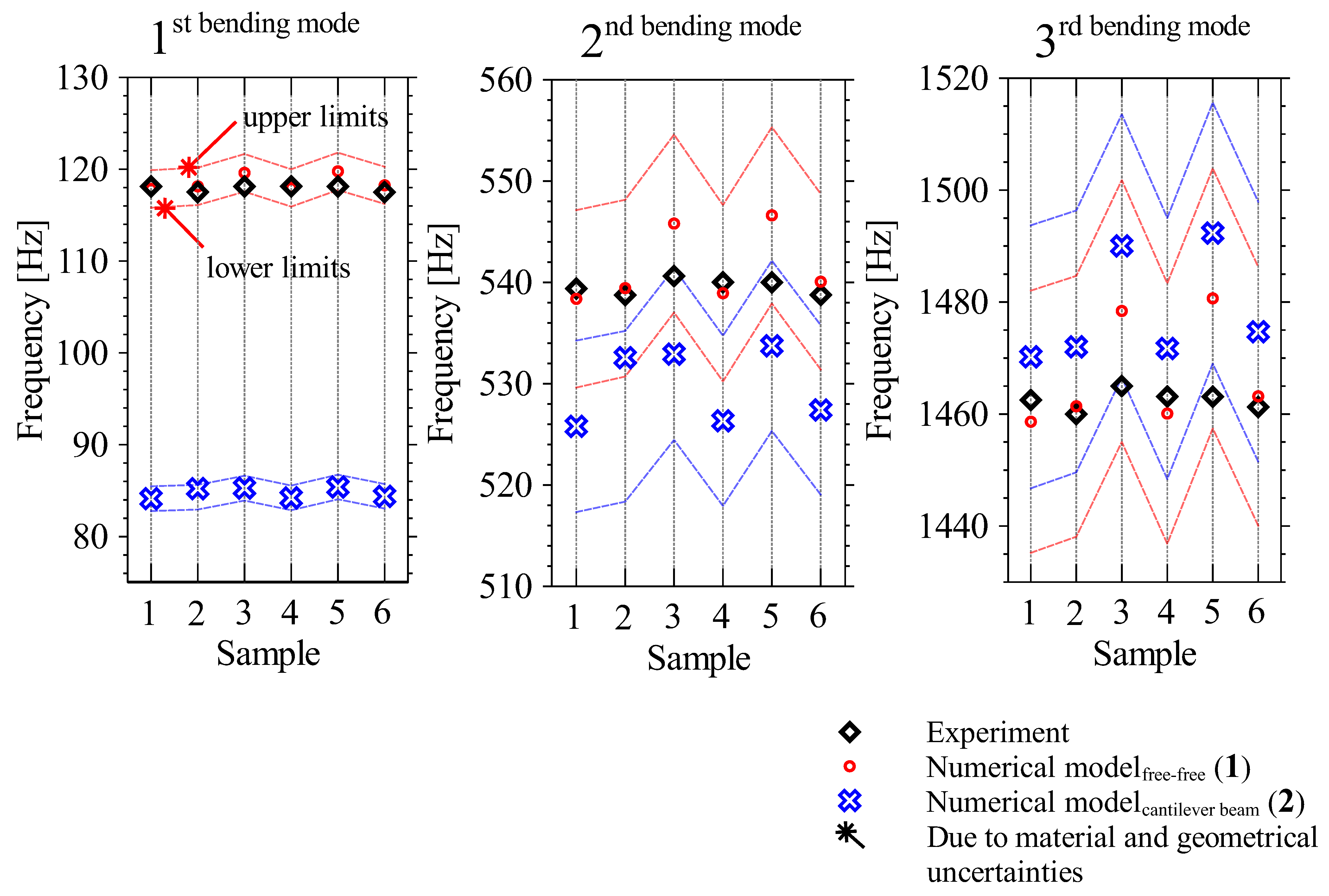
3. Results and Discussion
4. Conclusions
- A full finite element model for all the components, including large heavy masses, using ideal-free conditions for the model is better suited where comparisons to experimental results are necessary, given that sufficient computer memory resources are available.
- For the simplification of a large attached mass by an ideal clamped condition in a finite element model, a very high mass ratio is necessary, although the end results can still be quite poor even for the primary first bending mode.
- It is commonly known, and was demonstrated here, that an analytical model can yield satisfactory results for a beam with an attached tip–mass, when the structure is beam–like.
- Reduced size modelling by a finite element approach using only an offset point-mass term for simplification can be easily improved upon by adding a rotary inertia term. This increases the accuracy and reduces computer resources; however, choosing a suitable rotary inertia term has its own challenges.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| FEM | Finite Element Method |
| UQ | Uncertainty Quantification |
| EMA | Experimental Modal Analysis |
| FRF | Frequency Response Function |
| BC | Boundary Conditions |
References
- Simulia, D.S. ABAQUS V6.10 Documentation; Dassault Systèmes: Providence, RI, USA, 2010. [Google Scholar]
- Bathe, K.J. Finite Element Procedures; Prentice-Hall: New Jersey, NJ, USA, 1996. [Google Scholar]
- Zienkiewicz, O.C.; Taylor, R.L. The Finite Element Method Volume 1: Basic Formulation and Linear Problems; MacGraw-Hill Book Company: New York, NY, USA, 1989. [Google Scholar]
- Zienkiewicz, O.C.; Taylor, R.L. The Finite Element Method Volume 2: Solid and Fluid Mechanics, Dynamics and Non-Linearity; MacGraw-Hill Book Company: New York, NY, USA, 1991. [Google Scholar]
- Szabo, B.; Babuška, I. Finite Element Analysis; John Wiley & Sons, Inc.: New York, NY, USA, 1991. [Google Scholar]
- Ghanem, R.G. Uncertainty Quantification in Computational and Prediction Science. Int. J. Numer. Methods Eng. 2009, 80, 671–672. [Google Scholar] [CrossRef]
- Sargent, G. Verification and Validation of Simulation Models. In Proceedings of the Winter Simulation Conference, Orlando, FL, USA, 4 December 2005; pp. 53–59. [Google Scholar]
- Li, R.; Ghanem, R. Adaptive polynomial chaos expansions applied to statistics of extremes in nonlinear random vibration. Probab. Eng. Mech. 1998, 13, 125–136. [Google Scholar] [CrossRef]
- Lucor, D.; Su, C.H.; Karniadakis, G.E. Generalized polynomial chaos and random oscillators. Int. J. Numer. Methods Eng. 2004, 60, 571–596. [Google Scholar] [CrossRef]
- Soize, C. A comprehensive overview of a non–parametric probabilistic approach of model uncertainties for predictive models in structural dynamics. J. Sound Vib. 2005, 288, 623–652. [Google Scholar] [CrossRef] [Green Version]
- Sepahvand, K.; Marburg, S.; Hardtke, H.J. Stochastic free vibration of orthotropic plates using generalized polynomial chaos expansion. J. Sound Vib. 2012, 331, 167–179. [Google Scholar] [CrossRef]
- Marburg, S.; Beer, H.J.; Gier, J.; Hardtke, H.J.; Rennert, R.; Perret, F. Experimental verification of structural–acoustic modelling and design optimization. J. Sound Vib. 2002, 252, 591–615. [Google Scholar] [CrossRef]
- Marc, M.; Soize, C.; Avalos, J.D. Nonparametric stochastic modeling of structures with uncertain boundary, conditions/coupling between substructures. AIAA J. 2013, 51, 1298–1308. [Google Scholar]
- Ritto, T.G.; Sampaio, R.; Aguiar, R.R. Uncertain boundary condition Bayesian identification from experimental data: A case study on a cantilever beam. Mech. Syst. Signal Process. 2016, 68–69, 176–188. [Google Scholar] [CrossRef]
- Ewins, D. Exciting vibrations: The role of testing in an era of supercomputers and uncertainties. Meccanica 2016, 51, 3241–3258. [Google Scholar] [CrossRef] [Green Version]
- Alvin, K.; Oberkampf, W.; Diegert, K.; Rutherford, B. Uncertainty quantification in computational structural dynamics: A new paradigm for model validation. In Proceedings of the 16th International Modal Analysis Conference, Santa Barabara, CA, USA, 2–5 February 1998; Volume 2, pp. 1191–1198. [Google Scholar]
- Oberkampf, W.L.; DeLand, S.M.; Rutherford, B.M.; Diegert, K.V.; Alvin, K.F. Error and uncertainty in modeling and simulation. Reliab. Eng. Syst. Saf. 2002, 75, 333–357. [Google Scholar] [CrossRef]
- Smith, R.C. Uncertainty Quantification: Theory, Implementation, and Applications; Siam: Philadelphia, PA, USA, 2013; Volume 12. [Google Scholar]
- Sullivan, T.J. Introduction to Uncertainty Quantification; Springer: Cham/Heidelberg, Germany, 2015; Volume 63. [Google Scholar]
- Marburg, S.; Dienerowitz, F.; Fritze, D.; Hardtke, H.J. Case studies on structural-acoustic optimization of a finite beam. Acta Acust. United Acust. 2006, 92, 427–439. [Google Scholar]
- Inman, D.J.; Erturk, A. Piezoelectric Energy Harvesting; John Wiley & Sons: New York, NY, USA, 2011. [Google Scholar]
- Kirk, C.L.; Wiedemann, S.M. Natural Frequencies and Mode Shapes of a Free-Free Beam with Large End Masses. J. Sound Vib. 2002, 254, 939–949. [Google Scholar] [CrossRef]
- Langer, P.; Sepahvand, K.; Guist, C.; Bär, J.; Peplow, A.; Marburg, S. Matching experimental and three dimensional numerical models for structural vibration problems with uncertainties. J. Sound Vib. 2018, 417, 294–305. [Google Scholar] [CrossRef]
- Neumaier, A. Interval Methods for Systems of Equations; Cambridge University Press: Cambridge, UK, 1990. [Google Scholar]
- Moore, R.E. Methods and Applications of Interval Analysis; Society for Industrial and Applied Mathematics: Philadelphia, PA, USA, 1987. [Google Scholar]
- Elishakoff, I.; Soret, C. Remedy to overestimation of classical interval analysis: Analysis of beams with uncertain boundary conditions. Shock Vib. 2013, 20, 143–156. [Google Scholar] [CrossRef]
- Langer, P.; Sepahvand, K.; Marburg, S. Uncertainty quantification in analytical and finite element beam models using experimental data. In Proceedings of the 9th International Conference on Structural Dynamics, EURODYN 2014, Porto, Portugal, 30 June–2 July 2014. [Google Scholar]
- Langer, P.; Maeder, M.; Guist, C.; Krause, M.; Marburg, S. More Than Six Elements Per Wavelength: The Practical Use of Structural Finite Element Models and Their Accuracy in Comparison with Experimental Results. J. Comput. Acoust. 2017, 25, 1750025. [Google Scholar] [CrossRef]
- Ewins, D.J. Modal Testing: Theory and Practice; Research Studies Press: Letchworth, Hertfordshire, UK, 1984. [Google Scholar]
- ISO 7626-1:2011: Methods for the Experimental Determination of Mechanical Mobility; Parts 1–5. Technical Report; International Organisation for Standardization: Geneva, Switzerland, 2011.
- Han, S.M.; Benaroya, H.; Wei, T. Dynamics of transversely vibrating beams using four engineering theories. J. Sound Vib. 1999, 225, 935–988. [Google Scholar] [CrossRef] [Green Version]
- Benaroya, H.; Nagurka, M.L. Mechanical Vibration: Analysis, Uncertainties, and Control; CRC Press: Boca Raton, FL, USA, 2017. [Google Scholar]
- Inman, D. Engineering Vibration; Pearson Education: Upper Saddle River, NJ, USA, 2008. [Google Scholar]
- Meirovitch, L. Elements of Vibration Analysis, 2nd ed.; McGrawHill: New York, NY, USA, 1986. [Google Scholar]
- Andrews, K.; Shillor, M. Vibrations of a beam with a damping tip body. Math. Comput. Model. 2002, 35, 1033–1042. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters (Steel Specimens) | 1 | 2 | 3 | 4 | 5 | 6 | Mean | Standard Deviation |
|---|---|---|---|---|---|---|---|---|
| Length, l [m] | 0.2001 | 0.2001 | 0.1999 | 0.2002 | 0.2000 | 0.2002 | 0.2001 | |
| Width, w [m] | 0.0399 | 0.0399 | 0.0400 | 0.0400 | 0.0399 | 0.0400 | 0.0399 | |
| Thickness, h [m] | 0.0040 | 0.0040 | 0.0041 | 0.0040 | 0.0040 | 0.0040 | 0.0040 | |
| Density, [kgm] | 7700 | 7700 | 7700 | 7700 | 7700 | 7700 | 7700 | |
| Young’s modulus, E [GPa] | 203.1 | 202.6 | 203.1 | 203.3 | 205.2 | 204.1 | 203.6 | |
| Poisson’s ratio, [-] | 0.29 | 0.29 | 0.29 | 0.29 | 0.28 | 0.28 | 0.29 |
| Mode | Experiment [Hz] | (1) | (2) |
|---|---|---|---|
| 118 | |||
| 540 | |||
| 1462 |
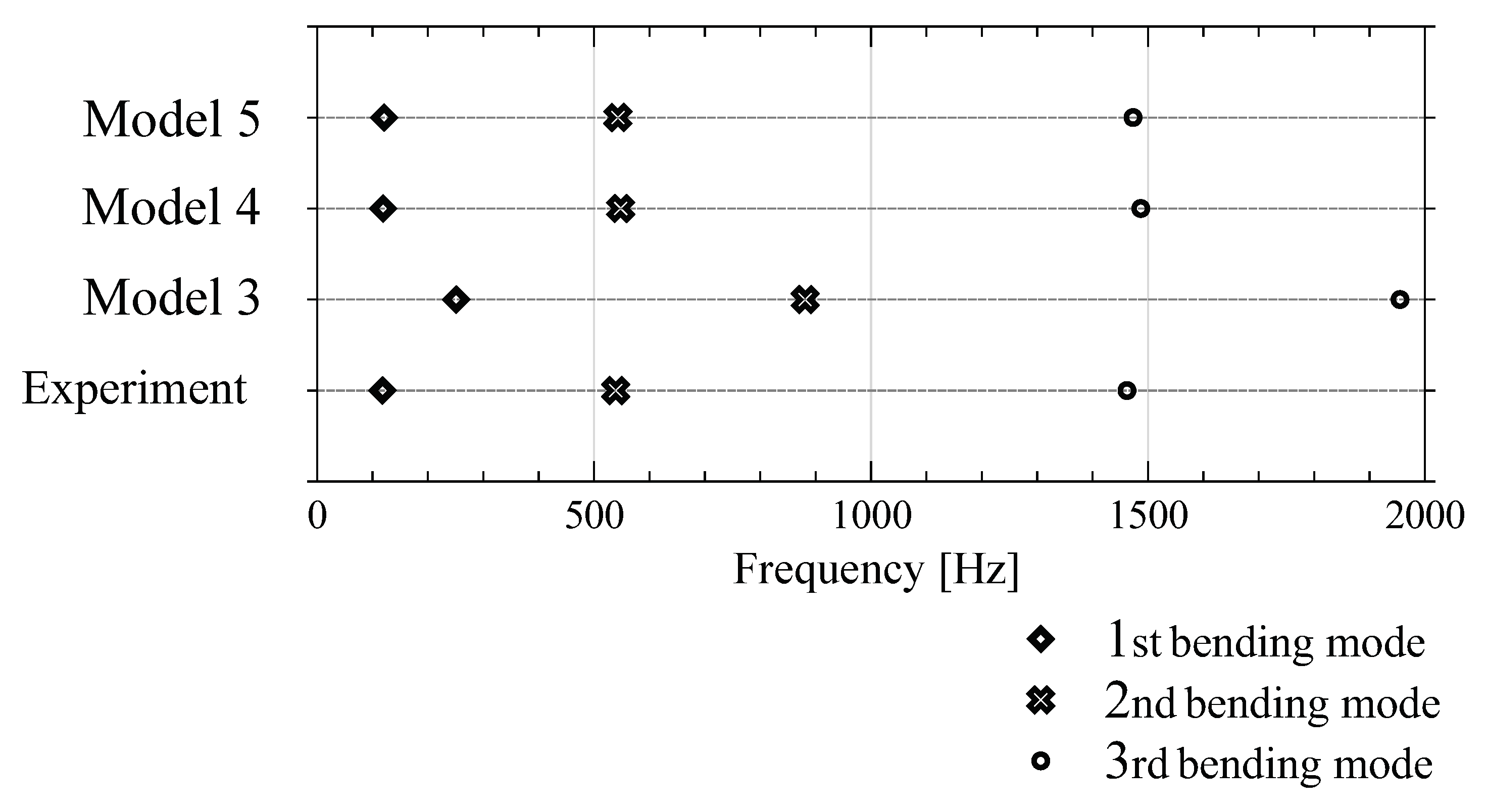
| Mode | Experiment [Hz] | FE (3) | FEfree-tip mass & inertia (4) | (5) |
|---|---|---|---|---|
| 118 | ||||
| 540 | ||||
| 1462 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Langer, P.; Jelich, C.; Guist, C.; Peplow, A.; Marburg, S. Simplification of Complex Structural Dynamic Models: A Case Study Related to a Cantilever Beam and a Large Mass Attachment. Appl. Sci. 2021, 11, 5428. https://doi.org/10.3390/app11125428
Langer P, Jelich C, Guist C, Peplow A, Marburg S. Simplification of Complex Structural Dynamic Models: A Case Study Related to a Cantilever Beam and a Large Mass Attachment. Applied Sciences. 2021; 11(12):5428. https://doi.org/10.3390/app11125428
Chicago/Turabian StyleLanger, Patrick, Christopher Jelich, Christian Guist, Andrew Peplow, and Steffen Marburg. 2021. "Simplification of Complex Structural Dynamic Models: A Case Study Related to a Cantilever Beam and a Large Mass Attachment" Applied Sciences 11, no. 12: 5428. https://doi.org/10.3390/app11125428