
Design, Development, and Evaluation of 5G-Enabled Vehicular Services: The 5G-HEART Perspective †

 , , , , , , , and
, , , , , , , and 
Abstract
:1. Introduction
1.1. Related Work
1.2. Contributions and Outline
- We study four vehicular service categories of the Transport vertical, each one entailing a few scenarios where the focus is on a specific service or functionality. In particular, we perform a first-pass analysis of the desired functionality, the operational environment, and the user requirements of each scenario within each major vehicular service category (Section 3 and Section 4).
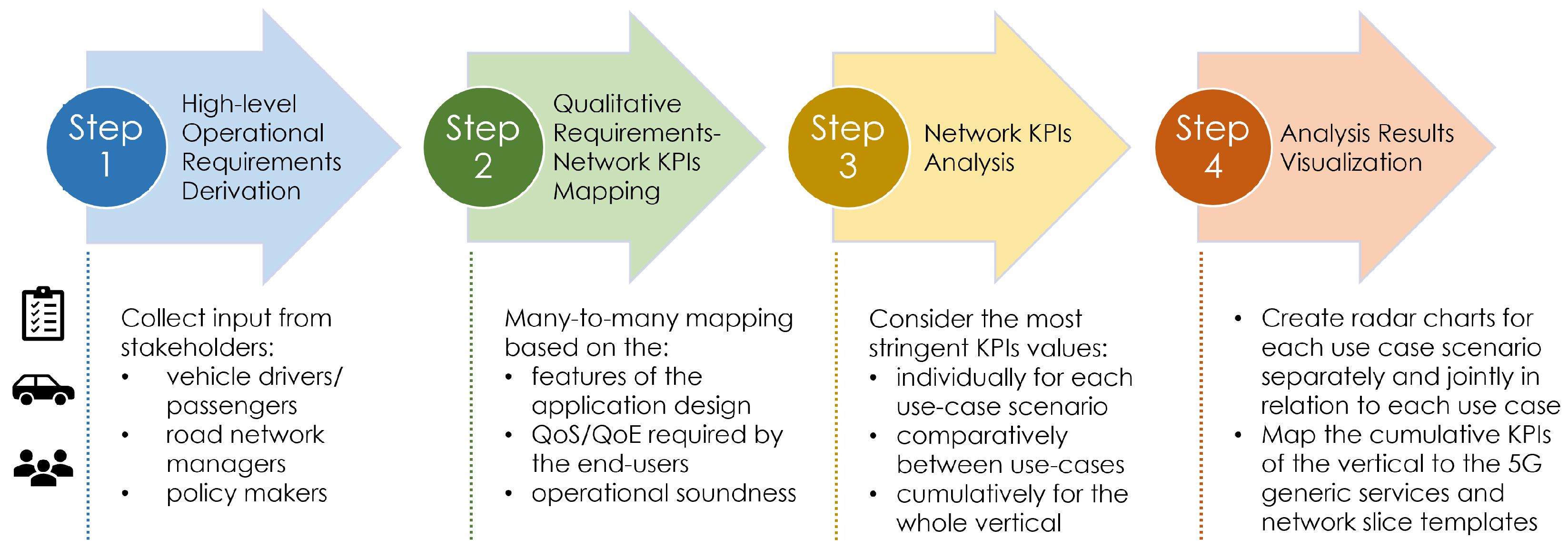
- We define and analyse the network Key Performance Indicators (KPIs) emerging in the considered scenarios of each vehicular service category. To that end, we devise a step-wise methodology for mapping the mostly high-level functional user requirements to more network-specific KPIs and we explore their interrelations (Section 2.3 and Section 4). The output of this effort is expected to be used for the evaluation of the forthcoming 5G-HEART trials.
- We pave the way towards network slice dimensioning. Namely, we determine and present the values of the network KPIs that will be required to be concurrently satisfied by the multiplexed virtualized and independent logical networks on the same physical network infrastructure, as allocated by the providers/operators to each specific scenario (Section 4 and Section 5).
- We discuss the impact of the derived network KPIs to the underlying physical infrastructure, providing insights for future enhancements to the employed architecture and the services currently foreseen in the 3GPP Release 15 and 16 (Section 5).
- We describe the configuration of a preliminary testing network setup, providing a fully controlled 5G network infrastructure based on commercial 5G equipment and spectrum (Section 6).
- Finally, we present the initial trials taking place within the context of the 5G-HEART project, aiming to evaluate the suitability of the preliminary 5G test configuration for supporting the examined vehicular services in order to guide the subsequent more advanced trials using optimized 5G networks (Section 7).
2. Technical Background and Methodology
2.1. Quantitative Assessment via Key Performance Indicators
- Throughput Downlink (DL)/Uplink (UL) (Mbps): the number of correctly received bits over a certain period of time at the respective direction (application layer).
- Latency (ms): the time it takes for a transmitted data packet to reach its destination.
- Reliability (%): the success probability of transmitting a small data packet from the radio protocol layer 2/3 Service Data Unit (SDU) ingress point (e.g., from Internet Protocol (IP) to Service Data Adaptation Protocol (SDAP) for the 5G NR user plane) to the radio protocol layer 2/3 SDU egress point of the radio interface (e.g., from SDAP to IP for the 5G NR user plane) within a certain delay [26].
- Mobility (km/h): the maximum user speed at which a defined Quality of Service (QoS) can be achieved.
- Location Accuracy (m): the accuracy with which location information is provided to the end device/user.
- Connection Density (devices/km2): the total number of devices fulfilling a target QoS per unit area (per km2).
- Interactivity (transactions/s): the number of issued commands/requests and received acknowledgements per device, within a short period of time.
- Area Traffic Capacity (Mbps/m2): the total traffic throughput served per geographic area.
- Security/privacy: the protection of the usability and integrity of user data, equipment and network, as well as the privacy of user identity and information.
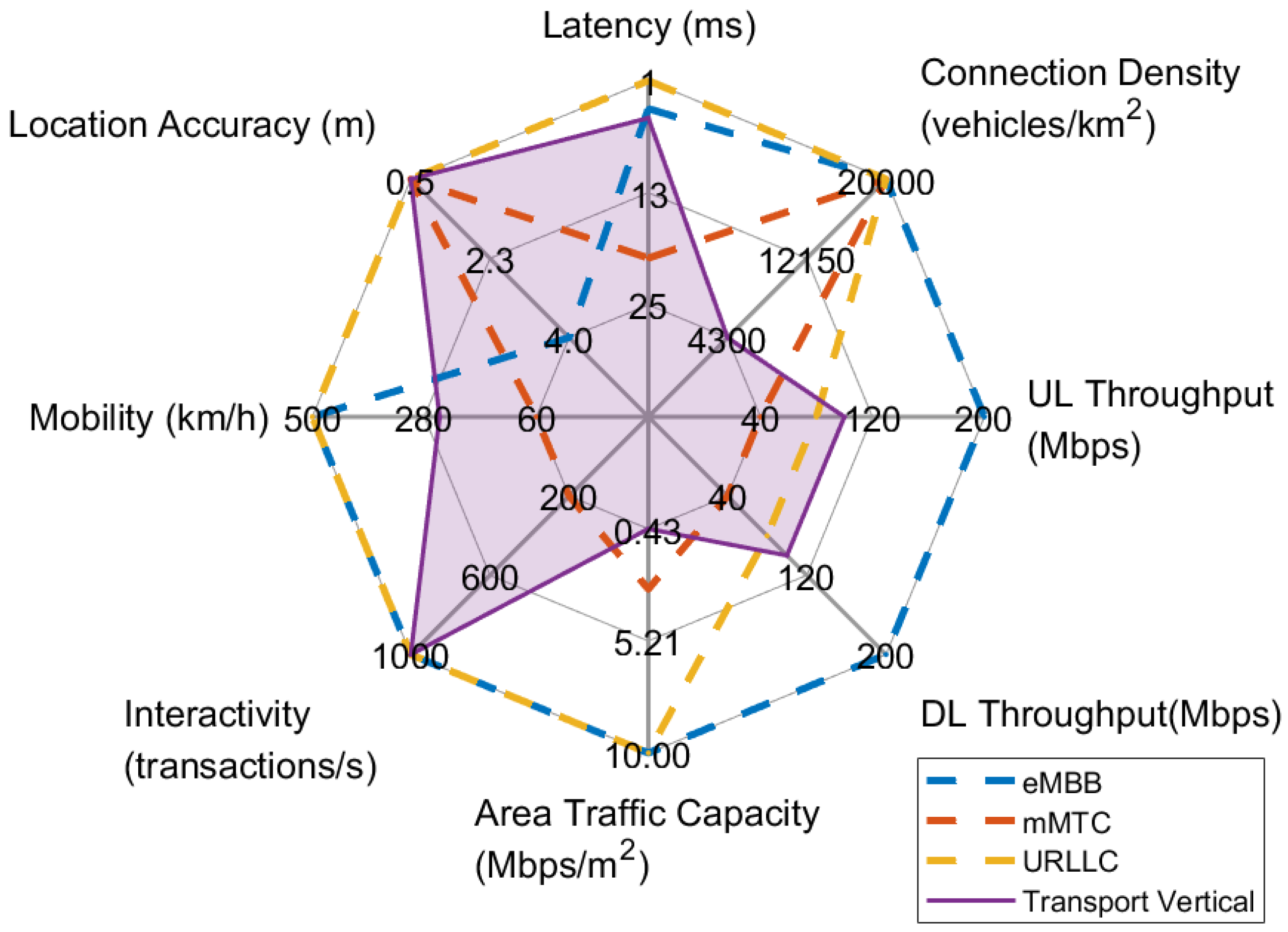
2.2. 5G Generic Services
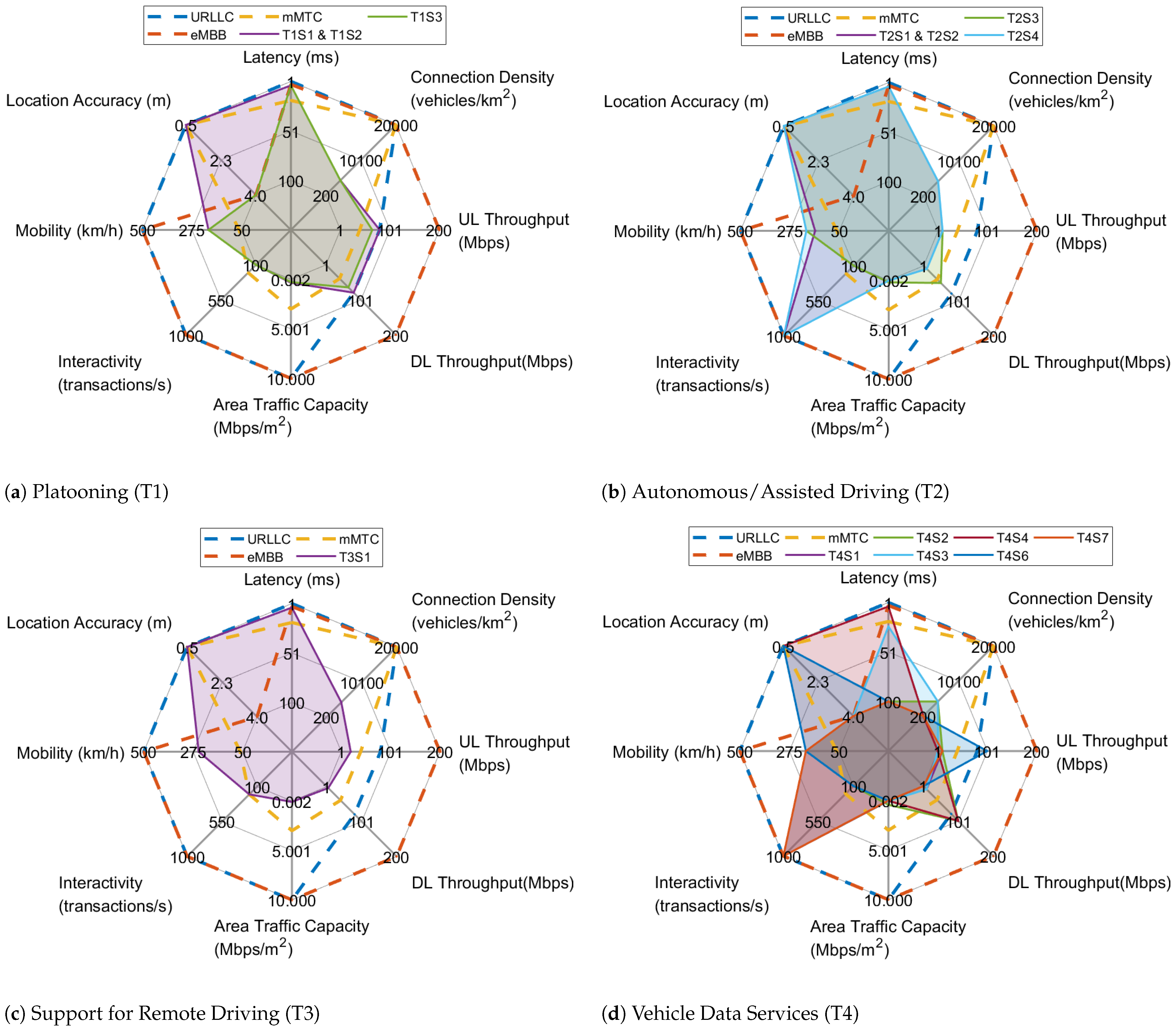
- Enhanced Mobile Broadband (eMBB): This service aims at scenarios that are data-driven and require stable connections with high peak data rates across a wide coverage area, as well as moderate data rates for cell-edge users. Representative examples of such bandwidth-intensive services and applications include new immersive experiences such as Augmented Reality (AR) and Virtual Reality (VR) and access to resource-intensive multimedia content and data, such as Ultra High Definition (UHD) video sharing (e.g., 4K and 8K). The target KPI values are determined as follows: 100 Mbps for user experienced data rate with up to 20 Gbps in DL (peak) and 10 Gbps in UL (peak), 10 Mbits/s/m2 for area traffic capacity in DL, down to 4 ms for latency in both UL and DL, and up to 500 km/h for mobility.
- Massive Machine Type Communications (mMTC): This service aims at scenarios characterized by a massive number of low-power devices in a small area, required to sporadically transmit a relatively low volume of delay-tolerant data. mMTC regards mainly applications in wearables and sensor networks. The main KPIs for the mMTC services include increased connection density, expanded coverage, and extended battery life. Taking into account the proliferation of IoT terminals, a target value for connection density of 1,000,000 devices/km2 (or equivalently 1 device/m2) is set for urban environments [29]. Regarding battery life, mMTC devices are required to operate for 10 to 15 years without changing or charging batteries. The coverage target of mMTC is defined in terms of 164 dB of Maximum Coupling Loss (MCL) (i.e., maximum total channel loss between the user equipment and base station antenna ports at which the data service can still be delivered). Finally, latency for the infrequent small packets shall be down to 10 ms in the UL.
- Ultra-Reliable and Low Latency Communications (URLLC): This service aims at supporting low-latency transmissions with extremely high reliability. Indicative examples of applications with such requirements include the remote control of critical infrastructure, remote medical procedures, and transportation safety. In URLLC, the critical KPIs include latency and reliability with target values of 1 ms and 99.999%, respectively. To meet these stringent requirements, a set of enablers are required, including edge caching, computing and slicing, short Transmission Time Interval (TTI), mini-slots, and flexible numerology. Such capabilities, along with the increased synchronization and location accuracy provided by URLLC, can be utilized in high mobility usage scenarios to enhance transportation safety, where high data rates can be more or less important on a case-by-case basis.
2.3. Methodology
3. Next-Generation Vehicular Services
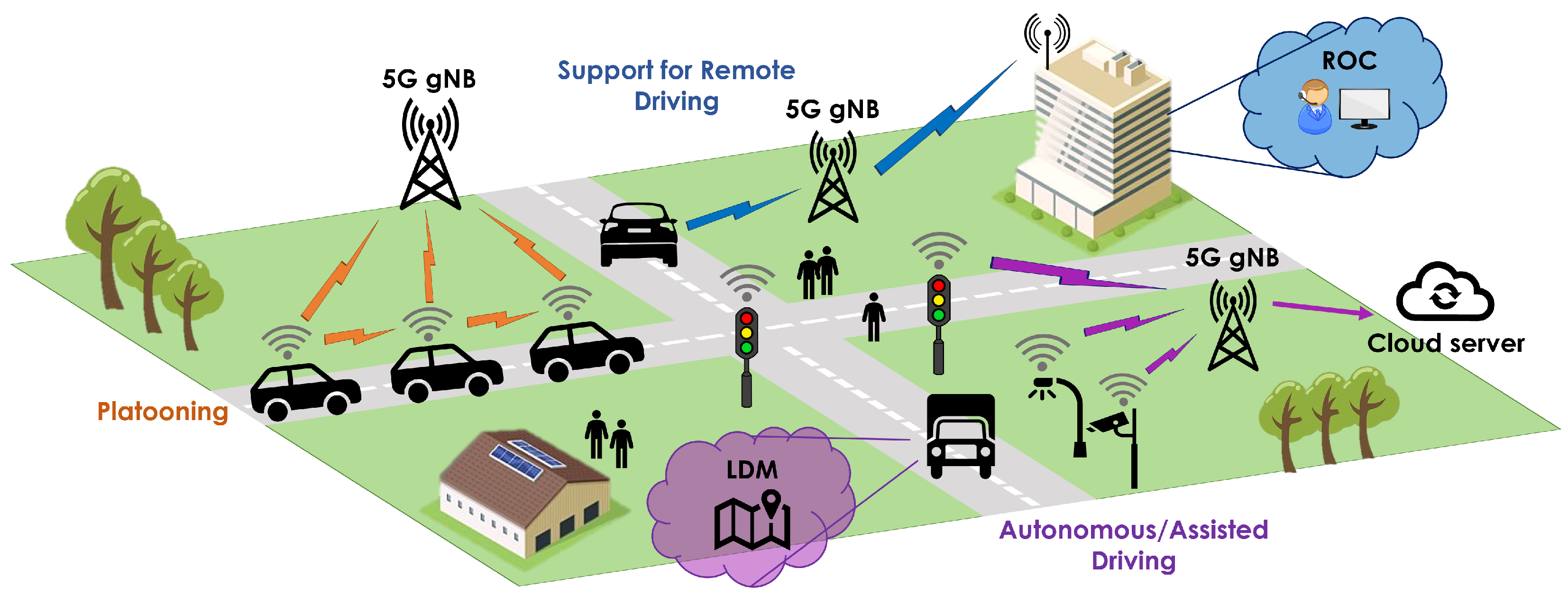
3.1. Platooning (T1)
- High bandwidth in-vehicle situational awareness and see-through for platooning (T1S1 and T1S2): In order to provide enhanced situational awareness, collision warning, and see-through applications for platooning, the 5G-HEART project capitalizes on the potential of Augmented Reality (AR) by promoting the specific functionality of high-bandwidth in-vehicle real-time streaming. The real-world view is first captured and constructed by the leading platoon vehicle and then projected on the auditory and visual systems of the following platoon vehicles, making their passengers feel more secure and keeping their anxiety levels low. This can also improve safety via redundancy by extending object/event detection to the trailing vehicles, increasing at the same time the comfort of the passengers by enabling them to anticipate the maneuvers performed by the platoon leader in response to the changing operating conditions.
- Dynamic channel management for traffic progression (T1S3): This scenario devises a dynamic radio channel management approach for optimizing the assignment of radio channels to the Vehicle-to-Vehicle (V2V) and Vehicle-to-Infrastructure (V2I) communication links of vehicle platoons, aiming at the efficient utilization of the scarce radio resources, while at the same time accounting for the platoons’ mobility (since the platoons are moving, assigning fixed channels to them is not efficient). The considered centralized architecture consists of a V2X application that leverages indicative platoon status information (e.g., velocity, current location, and destination) to optimally assign in real time radio channels to the platoons, in a way that satisfies their needs for localized, low-latency, high-reliability and frequent communications. The product of this analysis is a Radio Environmental Map (REM) that merges geo-location information with the best radio channels and is continuously updated upon relevant changes.
3.2. Autonomous/Assisted Driving (T2)
- Smart junctions and network assisted and cooperative collision avoidance (CoCA) (T2S1 and T2S2): This scenario strives to prevent traffic accidents and assist cooperative automated driving functions as the vehicles traverse an intersection by providing them network-assisted safety information. This information includes precise digital maps of intersections, the status of traffic signals, and the locations of vehicles and Vulnerable Road Users (VRUs). Such safety information is time-critical and dense within a very short period of time and thus should be efficiently communicated to the vehicles, for instance, in the form of a Local Dynamic Map (LDM). Furthermore, smart junctions can contribute to improving and controlling the traffic flow by prioritizing certain public service vehicles (e.g., ambulances or fire trucks).
- Quality of Service (QoS) for advanced driving (T2S3): This scenario scrutinizes two key network functionalities to support advanced driving, namely (i) the initial negotiation of the connectivity and quality of service (QoS) levels offered by the network at the beginning of a given trip and (ii) the dynamic selection of the most suitable level of automation based on the predicted/anticipated conditions. Providing predictive alerts about connectivity and/or QoS degradation enables the timely change of automation level, ranging from fully autonomous to manual driving modes, with the goal of avoiding traffic hazards and collisions in the most effective way. This gives the human driver the ability to proactively take control of the vehicle and avoid the potential activation of pre-programmed emergency routines.
- Human Tachograph (T2S4): The scope of this scenario is to monitor the driver’s condition status based on wearable devices and to leverage this information to support safety applications. The driver’s alertness and fitness-to-drive are assessed by fusing data from wearable and on-board sensors that monitor physiological parameters (e.g., heart rate, body temperature, and skin conductivity) in real time. Beyond the current state of the driver, monitoring can be extended to include historical data, such as sleep quality, stress levels, and physical activity during the last couple of days, in order to identify potential risk factors. In the short term, such analysis can be exploited to prevent hazardous situations, warn about imminent dangers, and provide guidance and corrective actions. In the long term, the collected data can be used to devise strategies for preventing fatigue and speeding up recovery before and after driving.
3.3. Support for Remote Driving (T3)
3.4. Vehicle Data Services (T4)
- Vehicle prognostics (T4S1): This scenario considers a road side unit (RSU) application that allows any passing vehicle to report its current operational state and receive a “Just in time repair notification” about any identified functional issue. To this end, the RSU application is connected to a local or a remote diagnosis/repair centre for the timely analysis of the reported data.
- Over-The-Air (OTA) updates (T4S2): This scenario provides Over-The-Air (OTA) software updates to vehicles, where the modules controlling the electronic functions, also known as Electronic Control Units (ECUs), are updated via 5G wireless connectivity in a transparent though secure manner. Since the vehicles do not need to be recalled by the manufacturer or be transferred to a service centre, these OTA updates are expected to significantly reduce maintenance costs.
- Smart traffic corridors (T4S3): This scenario focuses on the environmental benefits of collecting and analysing the vehicles’ historical and real-time data. More precisely, data collected by the vehicles can be used to intelligently route them with the goal of relieving congested areas and reducing emissions. Moreover, local administrators can leverage the extracted information to further optimize road maintenance.
- Location-based advertising (T4S4): This scenario studies the deployment of location-based servers that leverage the readily available vehicle and passenger information to stream on-demand content, context-specific advertising, and/or traffic guidance to geo-targeted groups. Such functionality becomes more important in the envisaged car-sharing models, where vehicles are temporarily rented and the routes they follow change frequently depending on the current passengers.
- Vehicle-sourced High-Definition (HD) mapping (T4S6): This scenario performs crowd-sourcing in collecting, maintaining and consolidating up-to-date data from the vehicles’ on-board sensors and cameras for the construction of accurate and dynamically configured HD maps. The constructed HD maps of roads and transportation infrastructure can be used to support the various autonomous driving-related services of the Transport vertical.
- Environmental services (T4S7): This scenario promotes the use of vehicles as a real-time source of rich weather and environmental sensor data that can be used for the construction of hyper-local weather maps. Such maps can be useful in aiding day-to-day driving and improving road maintenance processes.
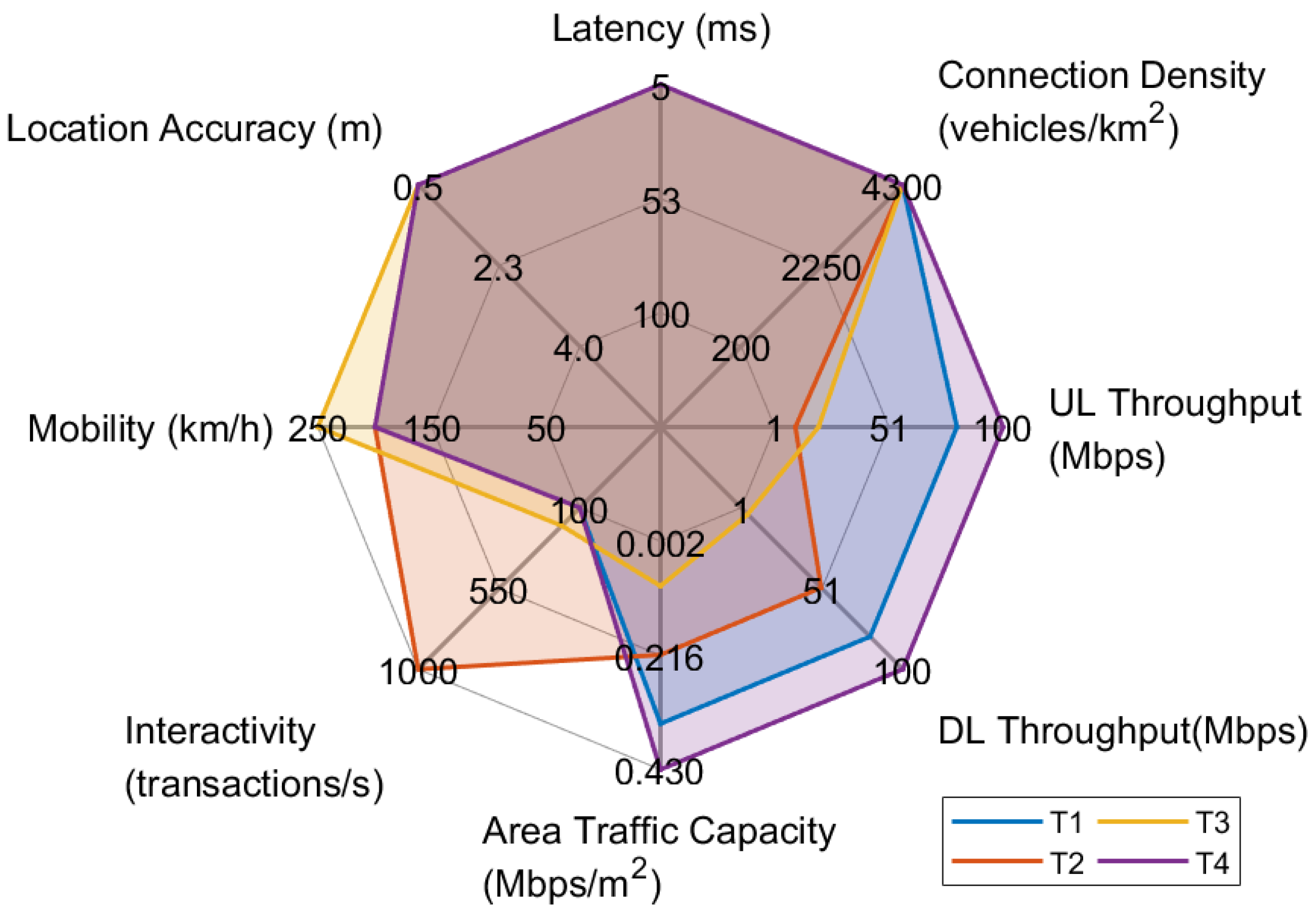
4. Network Key Performance Indicators Analysis
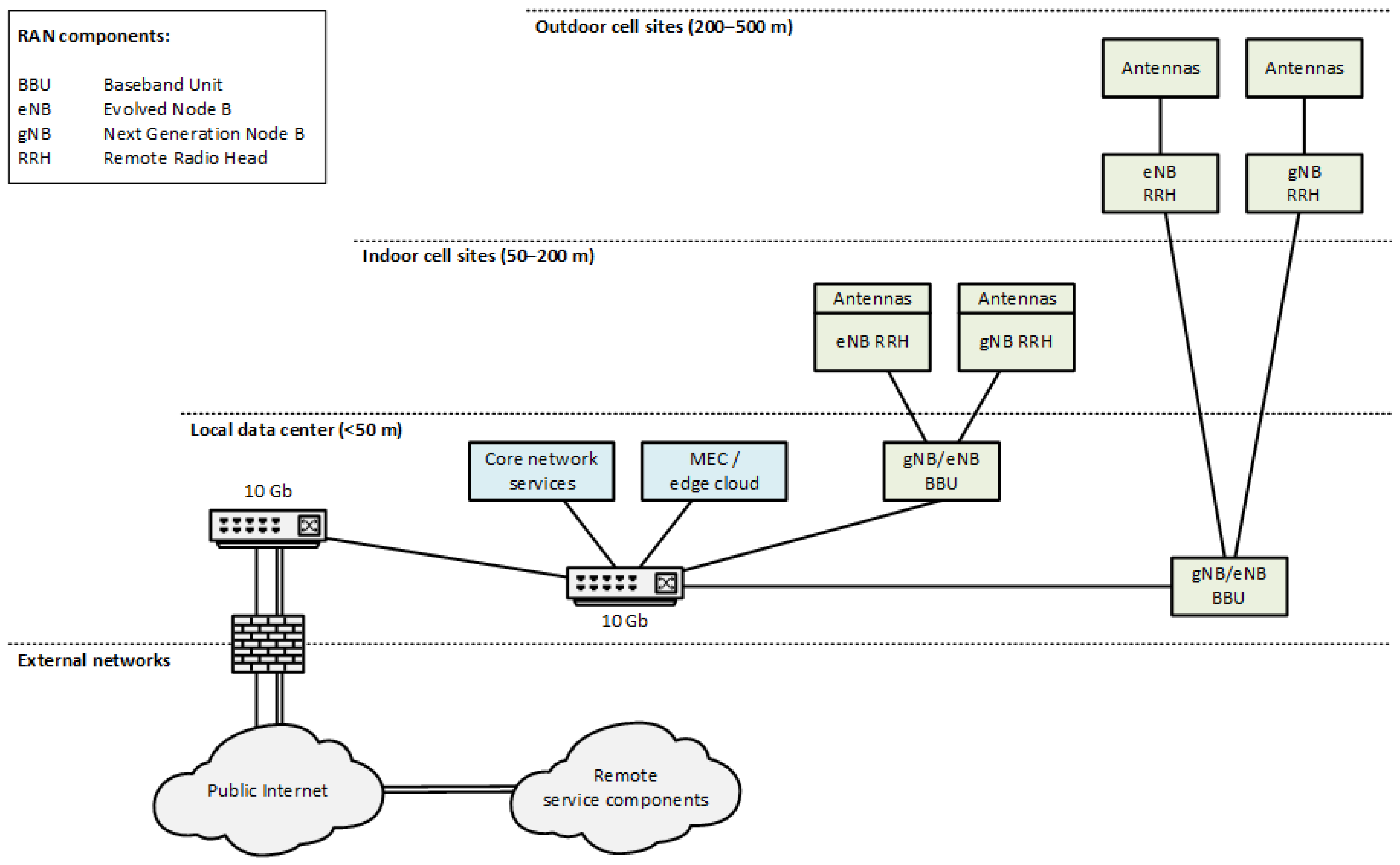
5. Unified Physical Network Infrastructure
6. 5G Test Network Setup
7. Preliminary Validation Trials and Measurements
8. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| 5G | Fifth Generation |
| QoS | Quality of Service |
| QoE | Quality of Experience |
| 5G-HEART | 5G HEalth, AquacultuRe and Transport |
| 5G PPP | 5G Infrastructure Public Private Partnership |
| KPI | Key Performance Indicator |
| eMBB | enhanced Mobile Broadband |
| mMTC | massive Machine Type Communications |
| URLLC | Ultra-Reliable Low Latency Communications |
| CCAM | Cooperated, Connected and Automated Mobility |
| RAN | Radio Access Network |
| AGV | Automated Guided Vehicle |
| V2V | Vehicle-to-Vehicle |
| V2X | Vehicle-to-Everything |
| V2I | Vehicle-to-Infrastructure |
| V2N | Vehicle-to-Network |
| 4G | Fourth Generation |
| DSRC | Dedicated Short-Range Communications |
| 3GPP | 3rd Generation Partnership Project |
| DL | Downlink |
| UL | Uplink |
| AR | Augmented Reality |
| VR | Virtual Reality |
| UHD | Ultra High Definition |
| REM | Radio Environmental Map |
| ROC | Remote Operations Center |
| HD | High Definition |
| GNSS | Global Navigation Satellite System |
| OTA | Over-the-Air |
| ECU | Engine Control Unit |
| CoCA | Cooperative Collision Avoidance |
| ROV | Remotely Operated Vehicle |
| MEC | Multi-Access Edge Computing |
| AI | Artificial Intelligence |
| SLA | Service Level Agreement |
| MCL | Maximum Coupling Loss |
| TTI | Transmission Time Interval |
| ADAS | Advanced Driver-Assistance System |
| CACC | Cooperative Adaptive Cruise Control |
| VRU | Vulnerable Road User |
| LoA | Level of Automation |
| RSU | Road Side Unit |
| 5GTN | 5G Test Network |
| VPN | Virtual Private Network |
| VNF | Virtualized Network Function |
| UE | User Equipment |
| NSA | Non-Standalone |
| SA | Standalone |
| 5GC | 5G Core |
| CA | Carrier Aggregation |
| DC | Dual Connectivity |
| DSS | Dynamic Spectrum Sharing |
| MIMO | Multiple-Input Multiple-Output |
| BF | Beamforming |
| QCI | Quality of Service Class Identifier |
| AC | Admission Control |
| HARQ | Hybrid Automatic Repeat Request |
| CG | Configured-Grant |
| SINR | Signal to Interference and Noise Ratio |
References
- Morgado, A.; Huq, K.M.S.; Mumtaz, S.; Rodriguez, J. A survey of 5G technologies: Regulatory, standardization and industrial perspectives. Digit. Commun. Netw. 2018, 4, 87–97. [Google Scholar] [CrossRef]
- 5G-HEART Project. Available online: https://5gheart.org/ (accessed on 10 May 2020).
- 5GPPP The 5G Infrastructure Public Private Prtnership. Available online: https://5g-ppp.eu/5g-ppp-phase-3-projects/ (accessed on 10 May 2020).
- Kakkavas, G.; Diamanti, M.; Stamou, A.; Karyotis, V.; Papavassiliou, S.; Bouali, F.; Moessner, K. 5G Network Requirement Analysis and Slice Dimensioning for Sustainable Vehicular Services. In Proceedings of the 2021 17th International Conference on Distributed Computing in Sensor Systems (DCOSS), Pafos, Cyprus, 14–16 July 2021. [Google Scholar] [CrossRef]
- Kakkavas, G.; Stamou, A.; Karyotis, V.; Papavassiliou, S. Network Tomography for Efficient Monitoring in SDN-Enabled 5G Networks and Beyond: Challenges and Opportunities. IEEE Commun. Mag. 2021, 59, 70–76. [Google Scholar] [CrossRef]
- Ullah, H.; Gopalakrishnan Nair, N.; Moore, A.; Nugent, C.; Muschamp, P.; Cuevas, M. 5G Communication: An Overview of Vehicle-to-Everything, Drones, and Healthcare Use-Cases. IEEE Access 2019, 7, 37251–37268. [Google Scholar] [CrossRef]
- Storck, C.R.; Duarte-Figueiredo, F. A Survey of 5G Technology Evolution, Standards, and Infrastructure Associated with Vehicle-to-Everything Communications by Internet of Vehicles. IEEE Access 2020, 8, 117593–117614. [Google Scholar] [CrossRef]
- Gohar, A.; Nencioni, G. The Role of 5G Technologies in a Smart City: The Case for Intelligent Transportation System. Sustainability 2021, 13, 5188. [Google Scholar] [CrossRef]
- Kanavos, A.; Fragkos, D.; Kaloxylos, A. V2X Communication over Cellular Networks: Capabilities and Challenges. Telecom 2021, 2, 1–26. [Google Scholar] [CrossRef]
- Hetzer, D.; Muehleisen, M.; Kousaridas, A.; Alonso-Zarate, J. 5G Connected and Automated Driving: Use Cases and Technologies in Cross-border Environments. In Proceedings of the 2019 European Conference on Networks and Communications (EuCNC), Valencia, Spain, 18–21 June 2019; pp. 78–82. [Google Scholar] [CrossRef]
- Fodor, G.; Vinogradova, J.; Hammarberg, P.; Nagalapur, K.K.; Qi, Z.T.; Do, H.; Blasco, R.; Baig, M.U. 5G New Radio for Automotive, Rail, and Air Transport. IEEE Commun. Mag. 2021, 59, 22–28. [Google Scholar] [CrossRef]
- Li, X.; Garcia-Saavedra, A.; Costa-Perez, X.; Bernardos, C.J.; Guimaraes, C.; Antevski, K.; Mangues-Bafalluy, J.; Baranda, J.; Zeydan, E.; Corujo, D.; et al. 5Growth: An End-to-End Service Platform for Automated Deployment and Management of Vertical Services over 5G Networks. IEEE Commun. Mag. 2021, 59, 84–90. [Google Scholar] [CrossRef]
- Doukoglou, T.; Gezerlis, V.; Trichias, K.; Kostopoulos, N.; Vrakas, N.; Bougioukos, M.; Legouable, R. Vertical Industries Requirements Analysis & Targeted KPIs for Advanced 5G Trials. In Proceedings of the 2019 European Conference on Networks and Communications (EuCNC), Valencia, Spain, 18–21 June 2019; pp. 95–100. [Google Scholar] [CrossRef] [Green Version]
- Campolo, C.; Fontes, R.; Molinaro, A.; Rothenberg, C.E.; Iera, A. Slicing on the Road: Enabling the Automotive Vertical through 5G Network Softwarization. Sensors 2018, 18, 4435. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Antevski, K.; Martin-Perez, J.; Molner, N.; Chiasserini, C.; Malandrino, F.; Frangoudis, P.; Ksentini, A.; Li, X.; SalvatLozano, J.; Martinez, R.; et al. Resource Orchestration of 5G Transport Networks for Vertical Industries. In Proceedings of the 2018 IEEE 29th Annual International Symposium on Personal, Indoor and Mobile Radio Communications (PIMRC), Bologna, Italy, 9–12 September 2018; pp. 158–163. [Google Scholar] [CrossRef] [Green Version]
- de la Oliva, A.; Li, X.; Costa-Perez, X.; Bernardos, C.J.; Bertin, P.; Iovanna, P.; Deiss, T.; Mangues, J.; Mourad, A.; Casetti, C.; et al. 5G-TRANSFORMER: Slicing and Orchestrating Transport Networks for Industry Verticals. IEEE Commun. Mag. 2018, 56, 78–84. [Google Scholar] [CrossRef] [Green Version]
- Spinelli, F.; Mancuso, V. Toward Enabled Industrial Verticals in 5G: A Survey on MEC-Based Approaches to Provisioning and Flexibility. IEEE Commun. Surv. Tutor. 2021, 23, 596–630. [Google Scholar] [CrossRef]
- Elayoubi, S.E.; Jemaa, S.B.; Altman, Z.; Galindo-Serrano, A. 5G RAN Slicing for Verticals: Enablers and Challenges. IEEE Commun. Mag. 2019, 57, 28–34. [Google Scholar] [CrossRef] [Green Version]
- Nakimuli, W.; Garcia-Reinoso, J.; Sierra-Garcia, J.E.; Serrano, P.; Fernandez, I.Q. Deployment and Evaluation of an Industry 4.0 Use Case over 5G. IEEE Commun. Mag. 2021, 59, 14–20. [Google Scholar] [CrossRef]
- Serizawa, K.; Mikami, M.; Moto, K.; Yoshino, H. Field Trial Activities on 5G NR V2V Direct Communication Towards Application to Truck Platooning. In Proceedings of the 2019 IEEE 90th Vehicular Technology Conference (VTC2019-Fall), Honolulu, HI, USA, 22–25 September 2019; pp. 1–5. [Google Scholar] [CrossRef]
- Okumura, Y.; Suyama, S.; Mashino, J.; Muraoka, K. Recent Activities of 5G Experimental Trials on Massive MIMO Technologies and 5G System Trials Toward New Services Creation. IEICE Trans. Commun. 2019, E102.B, 1352–1362. [Google Scholar] [CrossRef] [Green Version]
- Shah, S.A.A.; Ahmed, E.; Imran, M.; Zeadally, S. 5G for Vehicular Communications. IEEE Commun. Mag. 2018, 56, 111–117. [Google Scholar] [CrossRef]
- Yang, Y.; Hua, K. Emerging Technologies for 5G-Enabled Vehicular Networks. IEEE Access 2019, 7, 181117–181141. [Google Scholar] [CrossRef]
- Gyawali, S.; Xu, S.; Qian, Y.; Hu, R.Q. Challenges and Solutions for Cellular Based V2X Communications. IEEE Commun. Surv. Tutor. 2021, 23, 222–255. [Google Scholar] [CrossRef]
- Boban, M.; Kousaridas, A.; Manolakis, K.; Eichinger, J.; Xu, W. Connected Roads of the Future: Use Cases, Requirements, and Design Considerations for Vehicle-to-Everything Communications. IEEE Veh. Technol. Mag. 2018, 13, 110–123. [Google Scholar] [CrossRef]
- 3rd Generation Partnership Project; Technical Specification Group Services and System Aspects; Service Requirements for Enhanced V2X Scenarios (Release 16). Technical Specification 3GPP TS 22.186 V16.2.0. 2020. Available online: https://www.etsi.org/deliver/etsi_ts/122100_122199/122186/16.02.00_60/ts_122186v160200p.pdf (accessed on 3 January 2022).
- Amjad, Z.; Sikora, A.; Hilt, B.; Lauffenburger, J.P. Low Latency V2X Applications and Network Requirements: Performance Evaluation. In Proceedings of the 2018 IEEE Intelligent Vehicles Symposium (IV), Changshu, China, 26–30 June 2018; pp. 220–225. [Google Scholar] [CrossRef]
- 3rd Generation Partnership Project; Technical Specification Group Radio Access Network; Study on Scenarios and Requirements for Next Generation Access Technologies; (Release 16). Technical Report 3GPP TR 38.913 V16.0.0. 2020. Available online: https://www.etsi.org/deliver/etsi_tr/138900_138999/138913/16.00.00_60/tr_138913v160000p.pdf (accessed on 3 January 2022).
- Minimum Requirements Related to Technical Performance for IMT-2020 Radio Interface(s). 2017. Report ITU-R M.2410-0. Available online: https://www.itu.int/dms_pub/itu-r/opb/rep/R-REP-M.2410-2017-PDF-E.pdf (accessed on 3 January 2022).
- IMT Vision—Framework and overall Objectives of the Future Development of IMT for 2020 and beyond. 2015. Recommendation ITU-R M.2083-0. Available online: https://www.itu.int/dms_pubrec/itu-r/rec/m/R-REC-M.2083-0-201509-I!!PDF-E.pdf (accessed on 3 January 2022).
- D2.1: Use Case Description and Scenario Analysis, December 2019. Available online: https://5gheart.org/wp-content/uploads/5G-HEART_D2.1.pdf (accessed on 27 September 2021).
- D4.2: Initial Solution and Verification of Transport Use Case Trials, November 2020. Available online: https://5gheart.org/wp-content/uploads/5G-HEART_D4.2_v2.0.pdf, (accessed on 28 September 2021).
- Zhang, H.; Liu, N.; Chu, X.; Long, K.; Aghvami, A.H.; Leung, V.C. Network Slicing Based 5G and Future Mobile Networks: Mobility, Resource Management, and Challenges. IEEE Commun. Mag. 2017, 55, 138–145. [Google Scholar] [CrossRef]
- Kaitotek Qosium. Available online: https://www.kaitotek.com/qosium (accessed on 11 November 2021).
- 5G Standalone: Global Market Status, November 2021. GSA Report. Available online: https://gsacom.com/paper/5g-standalone-november-executive-summary/ (accessed on 3 January 2022).
- Pocovi, G.; Shariatmadari, H.; Berardinelli, G.; Pedersen, K.; Steiner, J.; Li, Z. Achieving Ultra-Reliable Low-Latency Communications: Challenges and Envisioned System Enhancements. IEEE Netw. 2018, 32, 8–15. [Google Scholar] [CrossRef]
- Le, T.K.; Salim, U.; Kaltenberger, F. An Overview of Physical Layer Design for Ultra-Reliable Low-Latency Communications in 3GPP Releases 15, 16, and 17. IEEE Access 2021, 9, 433–444. [Google Scholar] [CrossRef]
- NGMN Overview on 5G RAN Functional Decomposition, February 2018. Final Deliverable. Available online: https://ngmn.org/wp-content/uploads/Publications/2018/180226_NGMN_RANFSX_D1_V20_Final.pdf (accessed on 3 January 2021).
- IEEE Std 1914.1-2019; IEEE Standard for Packet-Based Fronthaul Transport Network. IEEE: New York, NY, USA, 2019.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Network Requirement | Ranges |
|---|---|
| DL throughput | Low ≤ 1 Mbps |
| 1 Mbps < Medium ≤ 10 Mbps | |
| 10 Mbps < High | |
| UL throughput | Low ≤ 1 Mbps |
| 1 Mbps < Medium ≤ 10 Mbps | |
| 10 Mbps < High | |
| Latency | Tight ≤ 5 ms |
| 5 ms < Medium ≤ 25 ms | |
| Loose > 25 ms | |
| Reliability | Low ≤ 99.99 |
| 99.99 < Medium ≤ 99.999 | |
| 99.999 < High ≤ 99.99999 | |
| Mobility | Low ≤ 50 km/h |
| 50 km/h < Medium ≤ 200 km/h | |
| 200 km/h < High ≤ 500 km/h | |
| Location accuracy | Low > 25 m |
| 1 m < Medium ≤ 25 m | |
| High ≤ 1 m | |
| Connection density | No specific range; 4.3 × 103 vehicles/km2 (peak) |
| Interactivity | Low ≤ 1 transactions/s |
| 1 < Medium ≤ 100 transactions/s | |
| 100 < High ≤ 1000 transactions/s | |
| Area traffic capacity | No specific range; 10 Mbps/m2 (peak) |
| Security/privacy | Low: Public |
| Medium: Restricted | |
| High: Confidential |
| Network KPI | Units | Platooning (T1) | Autonomous/Assisted Driving (T2) | Support for Remote Driving (T3) | Vehicle Data Services (T4) |
|---|---|---|---|---|---|
| DL throughput | Mbps | 80 | 50 | 5 | 100 |
| UL throughput | Mbps | 80 | 10 | 20 | 100 |
| Latency | ms | 5 | 5 | 5 | 5 |
| Reliability | % | 99.99999 | 99.99999 | 99.999 | 99.999 |
| Mobility | km/h | 200 | 200 | 250 | 200 |
| Location accuracy | m | 0.5 | 0.5 | 0.5 | 0.5 |
| Connection density | vehicles/km2 | 4300 | 4300 | 4300 | 4300 |
| Interactivity | transactions/s | 100 | 1000 | 200 | 100 |
| Area traffic capacity | Mbps/m2 | 0.344 | 0.215 | 0.086 | 0.43 |
| Security/privacy | Public/Restricted/Confidential | Confidential | Confidential | Confidential | Confidential |
| Network Parameter | Configuration Value |
|---|---|
| Frequency band | 3.5 GHz (Band n78) |
| Channel bandwidth | 60 MHz |
| Duplex mode | TDD |
| DL/UL ratio | 7/3 |
| Subcarrier spacing | 30 kHz |
| Transmission time interval | 0.5 ms |
| Modulation | 256 QAM in DL |
| 64 QAM in UL | |
| MIMO | 4 × 4 in DL |
| 1 × 2 in UL |
| Network KPI | Measurement Value |
|---|---|
| Best-case DL throughput | 568 Mbps |
| Best-case UL throughput | 63 Mbps |
| Average DL latency | 4.0 ms |
| Average UL latency | 4.7 ms |
| DL reliability | 99.99% @ 11 ms |
| UL reliability | 99.99% @ 16 ms |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kakkavas, G.; Diamanti, M.; Stamou, A.; Karyotis, V.; Bouali, F.; Pinola, J.; Apilo, O.; Papavassiliou, S.; Moessner, K. Design, Development, and Evaluation of 5G-Enabled Vehicular Services: The 5G-HEART Perspective. Sensors 2022, 22, 426. https://doi.org/10.3390/s22020426
Kakkavas G, Diamanti M, Stamou A, Karyotis V, Bouali F, Pinola J, Apilo O, Papavassiliou S, Moessner K. Design, Development, and Evaluation of 5G-Enabled Vehicular Services: The 5G-HEART Perspective. Sensors. 2022; 22(2):426. https://doi.org/10.3390/s22020426
Chicago/Turabian StyleKakkavas, Grigorios, Maria Diamanti, Adamantia Stamou, Vasileios Karyotis, Faouzi Bouali, Jarno Pinola, Olli Apilo, Symeon Papavassiliou, and Klaus Moessner. 2022. "Design, Development, and Evaluation of 5G-Enabled Vehicular Services: The 5G-HEART Perspective" Sensors 22, no. 2: 426. https://doi.org/10.3390/s22020426