
Abstract
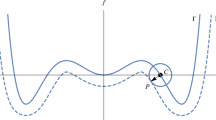
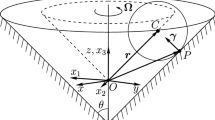
We study some aspects of the dynamics of the nonholonomic system formed by a heavy homogeneous ball constrained to roll without sliding on a steadily rotating surface of revolution. First, in the case in which the figure axis of the surface is vertical (and hence the system is \(\textrm{SO(3)}\times\textrm{SO(2)}\)-symmetric) and the surface has a (nondegenerate) maximum at its vertex, we show the existence of motions asymptotic to the vertex and rule out the possibility of blowup. This is done by passing to the 5-dimensional SO(3)-reduced system. The SO(3)-symmetry persists when the figure axis of the surface is inclined with respect to the vertical — and the system can be viewed as a simple model for the Japanese kasamawashi (turning umbrella) performance art — and in that case we study the (stability of the) equilibria of the 5-dimensional reduced system.



Similar content being viewed by others

Notes
As long as it is regular at the vertex, thus excluding, e. g., the case of a conical surface
From now it is understood that, unless otherwise specified, \(\psi\) and its derivatives are evaluated at \({\textstyle\frac{1}{2}}|x|^{2}\) and \(F\) at \(|x|\).
They form two-parameter families and therefore there are at least two zero eigenvalues of the linearization. But in fact, there are always three zero eigenvalues; this can be explained through the already mentioned fact that the \(\textrm{SO{(3)}}\times\textrm{SO{(2)}}\)-reduced system has a Hamiltonian structure.
Such as the one available at https://www.youtube.com/watch?v=FeDyMdh1JLQ
In the movie, the angle \(\alpha\) is small and the ball sits at a distance from the rotation axis which is approximately two to three times its radius, hence \(x_{1}>1\).
References
Balseiro, P. and Yapu, L. P., Conserved Quantities and Hamiltonization of Nonholonomic Systems, Ann. Inst. H. Poincaré C Anal. Non Linéaire, 2021, vol. 38, no. 1, pp. 23–60.
Balseiro, P. and Sansonetto, N., First Integrals and Symmetries of Nonholonomic Systems, Arch. Ration. Mech. Anal., 2022, vol. 244, no. 2, pp. 343–389.
Bates, L. and Śniatycki, J., Nonholonomic Reduction, Rep. Math. Phys., 1993, vol. 32, no. 1, pp. 99–115.
Bloch, A. M., Krishnaprasad, P. S., Marsden, J. E., and Murray, R. M., Nonholonomic Mechanical Systems with Symmetry, Arch. Rational Mech. Anal., 1996, vol. 136, no. 1, pp. 21–99.
Borisov, A. V., Ivanova, T. B., Karavaev, Yu. L., and Mamaev, I. S., Theoretical and Experimental Investigations of the Rolling of a Ball on a Rotating Plane (Turntable), Eur. J. Phys., 2018, vol. 39, no. 6, 065001, 13 pp.
Borisov, A. V., Ivanova, T. B., Kilin, A. A., and Mamaev, I. S., Nonholonomic Rolling of a Ball on the Surface of a Rotating Cone, Nonlinear Dynam., 2019, vol. 97, no. 2, pp. 1635–1648.
Borisov, A. V., Ivanova, T. B., Kilin, A. A., and Mamaev, I. S., Circular Orbits of a Ball on a Rotating Conical Turntable, Acta Mech., 2020, vol. 231, no. 3, pp. 1021–1028.
Borisov, A. V., Mamaev, I. S., and Bizyaev, I. A., The Jacobi Integral in Nonholonomic Mechanics, Regul. Chaotic Dyn., 2015, vol. 20, no. 3, pp. 383–400.
Borisov, A. V., Mamaev, I. S., and Kilin, A. A., The Rolling Motion of a Ball on a Surface: New Integrals and Hierarchy of Dynamics, Regul. Chaotic Dyn., 2002, vol. 7, no. 2, pp. 201–219.
Chicone, C., Ordinary Differential Equations with Applications, 2nd ed., Texts Appl. Math., vol. 34, New York: Springer, 2006.
Cushman, R., Duistermaat, H., and Śniatycki, J., Geometry of Nonholonomically Constrained Systems, Adv. Ser. Nonlinear Dynam., vol. 26, Hackensack, N.J.: World Sci., 2010.
Dalla Via, M., Fassò, F., and Sansonetto, N., On the Dynamics of a Heavy Symmetric Ball That Rolls without Sliding on a Uniformly Rotating Surface of Revolution, arXiv:2109.00236 (2021).
Fassò, F., García-Naranjo, L. C., and Sansonetto, N., Moving Energies As First Integrals of Nonholonomic Systems with Affine Constraints, Nonlinearity, 2018, vol. 31, no. 3, pp. 755–782.
Fassò, F. and Giacobbe, A., Geometry of Invariant Tori of Certain Integrable Systems with Symmetry and an Application to a Nonholonomic System, SIGMA Symmetry Integrability Geom. Methods Appl., 2007, vol. 3, Paper 051, 12 pp.
Fassò, F., Giacobbe, A., and Sansonetto, N., Periodic Flows, Rank-Two Poisson Structures, and Nonholonomic Mechanics, Regul. Chaotic Dyn., 2005, vol. 10, no. 3, pp. 267–284.
Fassò, F. and Sansonetto, N., Conservation of Energy and Momenta in Nonholonomic Systems with Affine Constraints, Regul. Chaotic Dyn., 2015, vol. 20, no. 4, pp. 449–462.
Fassò, F. and Sansonetto, N., Conservation of “Moving” Energy in Nonholonomic Systems with Affine Constraints and Integrability of Spheres on Rotating Surfaces, J. Nonlinear Sci., 2016, vol. 26, no. 2, pp. 519–544.
Field, M. J., Equivariant Dynamical Systems, Trans. Amer. Math. Soc., 1980, vol. 259, no. 1, pp. 185–205.
Golubitsky, M. and Guillemin, V., Stable Mappings and Their Singularities, Grad. Texts in Math., vol. 14, New York: Springer, 1973.
Hermans, J., A Symmetric Sphere Rolling on a Surface, Nonlinearity, 1995, vol. 8, no. 4, pp. 493–515.
Krupa, M., Bifurcations of Relative Equilibria, SIAM J. Math. Anal., 1990, vol. 21, no. 6, pp. 1453–1486.
Routh, E. J., The Advanced Part of a Treatise on the Dynamics of a System of Rigid Bodies: Being Part II of a Treatise on the Whole Subject, 6th ed., New York: Dover, 1955.
Watanabe, S., Kouda, M., and Kiyohiro, N., Positioning Control of a Rolling Ball on a Rotating Umbrella by a Kasamawashi Robot, Adv. Robot., 1998, vol. 13, no. 3, pp. 339–341.
Whitney, H., Differentiable Even Functions, Duke Math. J., 1943, vol. 10, pp. 159–160.
Zenkov, D. V., The Geometry of the Routh Problem, J. Nonlinear Sci., 1995, vol. 5, no. 6, pp. 503–519.
ACKNOWLEDGMENTS
The authors would like to thank Prof. Toshiro Iwai for pointing out to one of them the similarity between the dynamics of the ball on a rotating surface and the kasamawashi performance art.
Funding
F. F. has been partially supported by the MIUR-PRIN project 20178CJA2B New Frontiers of Celestial Mechanics: Theory and Applications.
Author information
Authors and Affiliations
Corresponding authors
Ethics declarations
The authors declare that they have no conflicts of interest.
Additional information
MSC2010
37J60, 70E18, 70F25, 70E50
APPENDIX. THE EQUATIONS OF MOTION OF THE SYSTEM
The equations of motion of the system can be determined in various routine ways which, however, as often happens with nonholonomic systems, involve some tedious computations. Here we follow the approach of [12].
Reference [12] employs a known form of the equations of motion of mechanical nonholonomic systems as the restriction to the constraint manifold of Lagrange equations with the nonholonomic reaction forces, writing them, however, in a way that allows for the use of quasi-velocities (Proposition 16 in the Appendix of [12]). Of course, one might just specialize those formulas to the present case, and this would indeed be the straightest — though somewhat laborious — approach. However, since the computations are there already made for the case \(\alpha=0\), in order to keep the length of this article to a minimum we prefer here to indicate how to modify that deduction to allow for \(\alpha\not=0\). There are in fact three other minor differences. One is technically irrelevant: reference [12] assumes that the domain \(I=(-R,R)\) of the profile function is the entire real axis, so that \(D=\mathbb{R}^{2}\). In addition, the derivation of the equations of motion in the Appendix of [12] uses the profile function \(f\), not \(\psi\), and a different parametrization of \(M_{8}\), which excludes the vertex and uses polar coordinates, namely, \((r,\theta,v_{r},v_{\theta},\mathcal{R},\omega_{\mathrm{z}})\in\mathbb{R}_{+}\times S^{1}\times\mathbb{R}\times\mathbb{R}\times\textrm{SO{(3)}}\times\mathbb{R}=:M_{8}^{\mathrm{pol}}\) with \(x_{1}=r\cos\theta\), \(x_{2}=r\sin\theta\), \(v_{r}=\dot{r}\), \(v_{\theta}=\dot{\theta}\). We thus indicate how to modify such a derivation.
First, the inclination of the surface has the only effect of changing the potential energy of the weight force: instead of \(g\mathrm{z}|_{M_{8}^{\mathrm{pol}}}=a\hat{g}f(r)\), it becomes \(g(\mathrm{z}\cos\alpha+\mathrm{x}\sin\alpha)|_{M_{8}^{\mathrm{pol}}}=a\hat{g}(f(r)\cos\alpha+r\sin\alpha\cos\theta)\). This has the consequence that the nonholonomic reaction force \(R\), given in formula (46) within the proof of Proposition 17 of [12], gets the following changes: in its \(\dot{r}\)-component the term \(\mu\hat{g}f^{\prime}\) has to be replaced with \(\mu\hat{g}(f^{\prime}\cos\alpha+\sin\alpha\cos\theta)\), its \(\dot{\theta}\)-component acquires a term \(-\mu\hat{g}r^{-1}\sin\alpha\sin\theta\) and its \(\omega_{\mathrm{z}}\)-component acquires a term \(-\mu\hat{g}F^{-1}f^{\prime}\sin\alpha\sin\theta\). These changes propagate to the equations for \(\dot{v}_{r}\), \(\dot{v}_{\theta}\) and \(\dot{\omega}_{\mathrm{z}}\) as given in Proposition 17 of [12] after multiplication by the appropriate entries of the inverse of the kinetic matrix (namely, \(F^{-2}\), \(r^{-2}\) and \(k^{-1}\), respectively).
Second, the equations for \(\dot{v}_{r}\) and \(\dot{v}_{\theta}\) can be transformed into equations for \(\dot{v}_{1}\) and \(\dot{v}_{2}\) by using the kinematical identities \(\dot{v}_{1}=\big{(}\frac{\dot{v}_{r}}{r}-v_{\theta}^{2}\big{)}x_{1}-\big{(}\dot{v}_{\theta}+2\frac{v_{r}v_{\theta}}{r}\big{)}x_{2}\) and \(\dot{v}_{2}=\big{(}\frac{\dot{v}_{r}}{r}-v_{\theta}^{2}\big{)}x_{2}+\big{(}\dot{v}_{\theta}+2\frac{v_{r}v_{\theta}}{r}\big{)}x_{1}\) and making the obvious substitutions \(r\to|x|\), \(\sin\theta\to\frac{x_{2}}{r}\), \(\cos\theta\to\frac{x_{1}}{r}\), \(v_{r}\to x\cdot v\), \(v_{\theta}\to\frac{x_{1}v_{2}-x_{2}v_{1}}{r}\). This leads to the equations \(\dot{x}_{1}=v_{1}\), \(\dot{x}_{2}=v_{2}\), \(\dot{\mathcal{R}}=\mathcal{R}^{T}\omega\) and
In this way we have proven that (2.7) are the equations of motion of the system in the subset of the phase space \(M_{8}\) where \(x\not=0\). Therefore, their right-hand side defines a vector field \(Y\) in \(M_{8}\setminus\{x=0\}\) which coincides with the restriction to such a set of the dynamical vector field of the system. But since the latter is known (from the general theory) to exist in all of \(M_{8}\), \(M_{8}\setminus\{x=0\}\) is dense in \(M_{8}\) and \(Y\) has a continuous extension to \(M_{8}\), the extension of \(Y\) is the dynamical vector field of the system in all of \(M_{8}\).
Rights and permissions
About this article

Cite this article
Fassò, F., Sansonetto, N. On Some Aspects of the Dynamics of a Ball in a Rotating Surface of Revolution and of the Kasamawashi Art. Regul. Chaot. Dyn. 27, 409–423 (2022). https://doi.org/10.1134/S1560354722040025
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1134/S1560354722040025