
Abstract
Coordination among different options is key for a functioning and efficient society. However, often coordination failures arise, resulting in serious problems both at the individual and the societal level. An additional factor intervening in the coordination process is individual mobility, which takes place at all scales in our world and whose effect on coordination is not well known. In this experimental work we study the behavior of people who play a pure coordination game in a spatial environment in which they can move around and when changing convention is costly. We find that each convention forms homogeneous clusters and is adopted by approximately half of the individuals. When we provide them with global information, i.e., the number of subjects currently adopting one of the conventions, global consensus is reached in most, but not all, cases. Our results allow us to extract the heuristics used by the participants and to build a numerical simulation model that agrees very well with the experiments. Our findings have important implications for policymakers intending to promote specific, desired behaviors in a mobile population.
Similar content being viewed by others


Introduction
Coordinating on a common task or adhering to a shared convention are extremely important behaviors in society. Coordinated behavior is fundamental in work sharing as it permits more efficient outcomes than miscoordination, as, e.g., in a production line in a factory. In shared conventions and norms, the rationale is that conforming to the behavior of the majority already following the norm confers more welfare than taking a different stance. Examples of the latter abound: driving on a given side of the road depending on the country, speaking the language of the majority, dressing according to generally accepted standards and so on. How norms and conventions have evolved is a complex process involving many factors23. It is commonly believed that norms and conventions become established and can change over time through a process of evolution and learning among the members of a population9,21. But it may well be that a given norm is just imposed through authority and enforcement against non-conforming behavior. This was the case in Sweden, for example, where the whole country shifted from driving on the left side of the road to the right side on 3 September, 1967. Of course, to be successful, the move had been prepared much in advance.
Norm-following behavior can be described in game-theoretical terms through pure coordination games. In these games the idea is that if the players choose the same action, i.e. they coordinate, then they are at Nash equilibrium and consequently they have no incentive to unilaterally change their action since this would result in reduced payoff. For example, the following matrix, Eq. (1), represents a two-player, two-strategy pure coordination game in which one may ideally identify each strategy as a “convention”.

There are two pure Nash equilibria in this game: (α, α) and (β, β). The problem with this approach is that there is no way to choose between the equilibria in the sense that they are both equally valid from the game-theoretical point of view. In practical situations one equilibrium might be better or easier to achieve than the other. For instance, if a is larger than b in the above game, it is likely that players will tend to coordinate on the payoff-dominant norm α. But when payoffs are the same and there is no apparent reason to select a particular convention, the multiple equilibria problem and the ensuing indeterminacy led Schelling to the notion of a “focal point” or “saliency”17 which is a piece of shared information such that people with similar background will be more likely to choose the coordinated solution that looks more “salient” to both of them. This and other similar concepts have been developed to try to restrict the possible solutions in these games.
In the present work, however, we take another point of view. We do accept that there may be multiple competing norms and that people have to weight the advantages and the drawbacks of sticking with a norm or switching to another one. This problem is crucially important in modern societies where, thanks to easy mobility, people of different backgrounds, nationality and culture may meet in large cities or even in whole countries. Those conventions may represent languages, religious beliefs, dressing attitudes, preferred food and many others. Some of the questions that one can ask in this context are the following: if at least two different conventions are present and actors can move around, which one, if any, will prevail in a population in the long run? Can different conventions coexist in a sufficiently stable manner? And what could be the main factors that influence the outcome? Since theory alone cannot provide all the answers to these questions, in order to shed some light on this socially important matter, researchers have tried to observe people behavior when confronted with that kind of choice. There have been a fair amount of experiments on pure coordination games in the past; most of them, however, have dealt with how people coordinate on equivalent conventions in the absence or presence of communication and extra-game knowledge2,3,13,14. Here psychological and cultural considerations are fundamental in the selection of a “prominent” convention. Many more experiments have been performed on the “stag hunt” class of coordination games19 in which equilibria have different properties, see e.g. Refs. 6,12. Experimental work on the stag hunt has also recently been done on networked populations, e.g.1,20. A complete review of the experimental work in the field of coordination games up to 2002 can be found in Camerer's book4. As previously said, our goal is related but different and so we designed a new type of laboratory experiment which is explained below.
The article is organized as follows. In the next section we describe the design of the experiment. Subsequently, we present and discuss the main experimental results. The following section presents a numerical simulation model based on the previous experimental observations and its application to larger populations and longer time horizons. The paper concludes with a discussion of the key findings.
Experimental Design
The main distinguishing features of our experimental setting are that we have a spatial dimension and participants can move around. Twenty participants occupy the cells of a virtual two-dimensional 8 × 8 grid that wraps around itself by assuming cyclic boundary conditions. An experimental treatment consists of 30 rounds. Each participant can only see a local neighborhood composed by the eight cells around himself. At each round, people play with their current neighbors according to the following pure coordination game matrix:

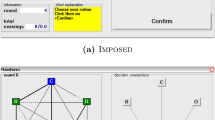
This differs from the pure coordination game of matrix 1: the Nash equilibria are always the diagonal pairs of strategies but miscoordination has been assigned a negative payoff. This stands for the inconvenience that may arise in many situations when interacting with the opposite convention. After having given the necessary information to the subjects (see SI sect. 1 for details), the experiment unfolds as follows. At the beginning, participants receive an initial endowment of 100 points and they are assigned to grid cells randomly such that no two players go into the same cell. Moreover, conventions α and β, being of equal value for partners of the same type, are also distributed at random among players such that there are ten participants for each convention. Before taking synchronous decisions, subjects see the following information on their screen: their current convention, their amount of cumulated points and the position and convention of their current neighbors. This is schematically shown in Fig. 1. For each player, a round of the treatment consists of deciding whether to keep the current convention or to switch to the alternative one, which can be done at a cost of 10 points. We decided to set a non-zero cost since changing conventions always requires an effort; for instance, when traveling abroad, if one wants to interact with people often a new language has to be learned. Next, each player decides whether or not to freely move to a neighboring empty cell. To avoid multiple cell occupancy, if more than one player wants to move to the same cell only one is chosen at random. The setting just described refers to the “local information” treatment, simply called local treatment from now on. In another setting, called “global information” treatment, the conditions are exactly the same except that participants also receive the information about the number of α and β conventions present in the population at each round, without seeing their positions in space. Henceforth, this is named as the global treatment.

Schematic view of the neighborhood seen by participants.
In this case, the central player could choose to switch to action β by paying a given cost, and/or to migrate to one of the empty cells indicated by the arrows. To avoid collisions, when more than one player decides to move to a neighboring empty cell, a random player is chosen to move during that round.
The local treatment is clearly related to the early cellular automata spatial segregation model of Schelling18. In the simplest form of this famous model, two kinds of agents live close to each other in a two-dimensional grid, but each prefers that a minimum fraction of his neighbors be of his own type. If this threshold, which is shared by all the agents, is not reached then the given agent will try to migrate to a free neighboring spot. Numerical simulations of the model show that when there is a sufficient number of “unsatisfied” agents the dynamics leads from mixing to segregated clusters of the two kinds of agents. While the diluted grid spatial setting is identical with the one used in our experiments, our agents are real, not automata. Indeed, Schelling's automata all obey the same deterministic or probabilistic threshold rule, which is not the case, in principle, for human subjects. In addition, Schelling's automata cannot change their action; in other words, behaviors are hard-wired. Thus, while Shelling's model has had inspirational value for the present work, our experiments include payoff-based human decisions besides mobility.
On the other hand, with the global treatment setting we aim to represent the fact that a world-wide information, such as the percentage of English speakers in the country, is considered common knowledge among the population and it can thus be found without much effort. Indeed, thanks to information media and the Internet in particular, acquiring information about the behavior of people who live outside our local environment is becoming increasingly cheaper. Here, we are interested in investigating how this outside-world information may influence group dynamics and whether it can be helpful in reaching higher coordination levels. This setting is therefore realistic for a variety of social phenomena in which global information is available.
Results
We begin the analysis of the data obtained through the experiments by describing first the results of the local treatment. In this setting, in all cases (9 out of 9 times) the system stabilized in a clustered form in which there were tight α and β clusters. These two groups were also spatially separated because of the negative payoff that occurs for interactions between opposite types. In other words, the population segregates according to the two conventions. This can be seen in Fig. 2 where we report the average size of the dominant convention over all the treatments (black symbols). Moreover, an example of a local treatment population observed at the end of a single run is shown in Fig. 3 (a). All other final population states can be found in the SI sect. 2.

Dominant convention size for local and global treatments.
This measure represents the global coordination level achieved by participants. Both values are averages and are depicted with standard error bars. At the beginning, conventions are equally distributed among participants, but, as time goes by, they become unbalanced reaching higher coordination levels in the global treatment case. The difference between final values has statistical significance (P < 0.01).

Characteristic arrangement of participant conventions at the end of local and global treatments
(see SI sect. 2 to find all other final configurations). The viewpoint of the toroidal space has been chosen so as to see the clusters in the middle of the grid. (a) In the local treatment participants always form (9 out of 9 times) two groups of similar size that adopt different conventions; clusters repel each other because of the negative payoff for the interaction between different conventions. (b) In the first scenario of the global treatment participants fully, or almost fully, converge (7 out of 12 times) to the same convention and they form a unique group maximizing their number of connections. (c) In the second scenario of the global treatment (5 out of 12 times), conventions balance remains equilibrate during the whole run and participants behavior looks analogous to the one seen in the local treatment case.
Analogous results for the global treatment are also given in Fig. 2 (red symbols). It is immediately apparent that, on average, global information significantly influences the outcome causing the prevalence of one convention over the other in most cases. However, mean values hide the fact that in seven out of twelve runs all the players aggregated into a single convention cluster, while in the other five cases we observed a behavior similar to the local treatment in which no convention really prevails. Figs. 3 (b) and (c) show two end of game snapshots illustrating these two cases.
We now turn to discussing the evolution of the number of neighbors adopting the same convention in local and global treatments. At the beginning of a run the expected value of this quantity is about one, since the initial disposition of the players in the grid is random and because of the equally distributed number of conventions among participants. However, as time goes by, players following the same convention tend to stick together and the value steadily increases for both treatments until it reaches a value around four. This value is almost equal to the number of connections participants have at the end of the treatment. This means that participants neighborhoods are mostly composed by players adopting the same convention. However, in the global treatment, participants are able to reach a slightly larger number of neighbors of the same convention because of the higher global coordination level achieved (see SI Fig. S5 for further details). The difference between final values of local and global treatments is statistically significant (aggregating per treatment, P < 0.1; considering single individuals per treatment, P < 0.05).
Figure 4 depicts one interesting aspect of the dynamics; it reports the fraction of participants that changed convention at each round averaged over all the sessions for local (black symbols) and global (red symbols) treatments. People change action at low rate at the beginning but later on they tend to stick to their current convention. This is true for both local and global treatments and there is no statistically significant difference between the two. Figure 4 also reports the fraction of participants moving to another position for local (in blue) and global (in orange) treatments. Here we see that the fraction of participants moving to another position starts at about 0.6 and goes down with time, but never becomes zero. In other words, even at the end of the run some participants are still moving around. Overall, subjects prefer to move in order to meet other people adopting the same convention rather than changing convention since the latter is costly while moving to another cell is cost-free.

Average frequency of movement and convention changing decisions per round.
Values are depicted with standard error bars. Black and red values represent convention changing frequency for local and global treatments, respectively. Only a small percentage of people changed convention during the whole experiment and almost all of them did it during the initial rounds. Blue and orange values represent subjects mobility for local and global treatments, respectively. At the beginning mobility is high but it tends to decrease with time for both treatments. Mobility never attains zero because of the persistent presence of unsatisfied players who move around the border of their cluster. Differences among treatments are not statistically significant (P > 0.35).
A key point in the experiment was to get an understanding of the reasons that motivate the participants' convention change and displacement decisions. In order to do so, we studied the frequency of these decisions as a function of the number of neighbors of the same or the opposite type they see in their neighborhood. These quantities, a priori, seemed to play an important role. Figure 5 (a) shows the average frequency of convention changes and Fig. 5 (b) is the average frequency of walking to a neighboring empty cell. From Fig. 5 (a) it appears that when participants see some players of the same type they are reluctant to switch to the other convention and this trend becomes stronger as the number of neighbors of the same type increases. Conversely, when they see at least two neighbors of the opposite type they have a tendency to pay the cost and switch to the other convention. The propensity to switch conventions in this case is higher in the global information treatment thanks to the reinforcement effect of the global signal.

Average frequency of convention change (a) and of displacement (b) as a function of the number of neighbors adopting the same or the opposite convention.
Values are depicted with standard error bars. There are no relevant observations for values greater than four. Black and red values represent local and global treatments, respectively, as a function of the number of the same type of neighbors. Blue and orange values stand for local and global treatments, respectively, as a function of the number of opposite type neighbors. (a) People are reluctant to change convention when they have at least one neighbor of the same type. It is apparent that the larger the number of opposite type individuals in the neighborhood, the higher the frequency of convention change. (b) Movement decision frequencies tend to quickly decrease with the number of neighbors of the same type, i.e. players are satisfied with at least four neighbors of their type. On the other hand, opposite convention curves are not monotonic and have a maximum between two and three opposite type neighbors.
As for the frequency of movement (Fig. 5 (b)), when there are four or more neighbors of the same type, i.e. about 50%, participants are satisfied and have little incentive to move, a situation reminiscent of Schelling's cellular automaton model. However, when neighbors of the same type are not enough, people tend to move with positive probability. This unsatisfied behavior also justifies mobility in the last rounds (see Fig. 4). The mobility behavior as a function of the number of neighbors of the opposite type is different and more interesting. We see that mobility is maximal around a value of two or three different neighbors. With more neighbors adopting the opposite convention it appears from Fig. 5 (a) that participants are more likely to change convention rather than to move. Indeed, it seems rational to pay a price in order to benefit from a future gain in the expectation that the new configuration will remain stable at least for a couple of time steps. These results can be seen in a complementary way by plotting the empirical frequencies of convention change and of displacement as a function of the difference between the number of neighbors of the same type minus those of the opposite type (see SI Fig. S7).
From these results we conclude that unsatisfied participants prefer to move rather than to change convention, given that the latter entails an effort in real life represented as a cost in our experiment. When only local information is available, the society of players tends to split into two clusters, one for each convention. On the other hand, when global information on the fraction of strategies in the whole population is provided, the most likely result is the convergence towards a cluster of the same type, with α and β being equally likely by definition. However, even with global information, we sometimes observed the formation of two different type clusters having almost the same size. A study of the fine dynamics of the evolution shows that the main drive for the dynamics can be attributed to the combination of the numbers of subjects of the same and of the opposite type in the neighborhood of a given player.
Numerical Simulation Model
Starting from the pioneering work of Schelling17, several theoretical models of convention evolution in spatial populations have been published. Among others, Mukherjee et al.15 proposed a simulation model for the problem in which artificial agents use learning in a complete grid to choose a convention but without mobility. Dall'Asta et al. published a theoretical paper of the original Schelling model based on statistical physics techniques7. Collard and Mesmoudi5 have proposed a model based on Schelling in which there is both heterogeneity of agents' preferences and learning. Finally, Zhang proposes a theoretical model of residential segregation evolution on a grid using the theory of stochastic games24.
These theoretical and simulation models are interesting but would not be able to forecast or reproduce any particular set of data coming from a laboratory experiment such as ours because of their lack of diversity and heterogeneity of behavior. Instead, here we would like to follow another more empirical approach based on our experimental observations. The goal is not a general abstract model of how people behave in spatial convention evolution but rather, more modestly, to be able to numerically simulate larger societies of “average agents” that behave similarly to our experimental subjects. This seems to us a useful step because for technical and financial reasons larger populations for longer time horizons cannot be studied experimentally.
The important feature of the model is to state precisely how subjects decide to change convention and how they decide to move. From the observation of the participants' behavior, we make the hypothesis that the key factor for changing conventions and for moving is the number and type of individuals in the neighborhood around a given player. Thus, let us define a variable

for the neighborhood of a given focal individual. We then define for the local information model the probability function pc,L (Δ) of changing convention and the probability function pm,L (Δ) of moving to a neighboring empty cell. Here c and m stand for convention change and movement, respectively and L refers to the local model. Functions pc,G (Δ, i) and pm,G (Δ, i) are used for the global information model (G). The global information value 0 ≤ i ≤ 1 is defined as the percentage of players in the population adopting the opposite convention. The form of pc,L (Δ) used here is similar in spirit to the one proposed by Romero et al.16 in the study of hashtag diffusion in Twitter.
From the experimental data points (see SI Fig. S8), we found pc,L = 0, for Δ ≥ 0 and pc,L = 1, for Δ ≤ −5. Then, the simplest assumption which qualitatively agrees with the data is to use the straight line pc,L = −Δ/5 in the range −5 < Δ < 0. To estimate pm,L and to keep things as simple as possible, we fitted experimental data points in the range −5 ≤ Δ ≤ 5 with two symmetric lines with a maximum of 0.75 for Δ = 0. The corresponding equations are: pm,L = 0.75 + 0.15Δ, for −5 ≤ Δ ≤ 0 and pm,L = 0.75 − 0.15Δ, for 0 < Δ ≤ 5. pm,L = 0 for all other values.
From the experimental data we observed that the empirical frequency of moving has the same shape for both the local and global information treatments (see SI Fig. S7). Therefore, we assumed pm,L = pm,G. On the other hand, experimental results clearly show that action changes are influenced by the availability of global information. We model this situation introducing eq. 3:

where λ = (2i − 1) + 2(1 − i)pc,L.
We can see that when global information i = 0.5, i.e. when there is an equal number of the two conventions in the grid, i does not provide any positive or negative signal to the individuals and thus equation 3 reduces to the local information model, pc,G = pc,L. Conversely, when i → 1, it follows that pc,G → 1 since most, or all the other players follow the opposite convention. Finally, for i → 0, the probability pc,G to change convention is positive only if pc,L > 0.5 that is, only if the opposite convention is strongly dominant in its neighborhood (see SI Fig. S9 for further details).
Having defined how agents take their decisions, the population evolution is simulated by two stochastic processes at each time step t for each agent in the population: the update of agent's current action according to probability pc and the movement to a neighboring free position according to probability pm. Since the population evolution is synchronous in time, each step occurs simultaneously as in the laboratory experiment. When an agent decides to move to a neighboring free position she does so in an opportunistic way, choosing the most profitable position among those available. In taking this decision the agent only sees the subset of cells that belong to her original neighborhood; she has no information on the rest of her new neighborhood. When two or more agents try to move to the same empty cell, the collision is resolved randomly. If there are no empty cells around a given agent, the agent doesn't move.
To validate the model, we provide results for the experimental laboratory setting values in the SI sect. 5. But, as said above, one of the advantages of simulations is that they can be applied to larger systems and for longer time horizons, both of which are very useful to overcome the technical and financial limitations of experiments with human participants, once a suitable model is available. Besides, other values of the system parameters can be quickly tested, as we do below with the system density. The results are reported in Fig. 6. Figure 6 (a) shows the behavior of the predominant convention size for several grid sides L from L = 4 up to L = 40; the agent density is 1/3. The curves depict this quantity at three different time steps in the evolution: t = 30, as in the experiment, t = 300 and t = 3000. Figures 6 (b) and (c) show the same results but for density 1/2 and 2/3 respectively. The important phenomenon to note here is that, in the local model and for all tried densities, convergence to a single convention only occurs for small grid sizes. When the populations evolve in larger grids clusters of individuals following different conventions form but do not merge and they remain segregated. This does not happen when global information is made available to the agents, in which case the tendency is toward convergence of the population to a single convention in all cases given enough time. In a different setting related results have recently been obtained by Gleeson et al.10. These authors study the likelihood of adopting applications in Facebook as a function of the number of applications installed in a given time window. They find that recent levels of application's installation activity are much more important than cumulative adoption levels, which means that local data in the temporal sense are more important than global ones, differently from what we found in our spatially extended system.

Dominant convention size for local and global models at different density, grid side and time horizon.
The values are averages over 100 runs in each case and standard error bars are shown. Black curves correspond to the local model while red curves are for the global model. The population density, from left to right, is 1/3 (a), 1/2 (b) and 2/3 (c). Numerical results for the experimental laboratory setting are reported in panel (a) where agent density is 1/3 and for a grid side of eight cells. Values at 30 time steps for local and global models qualitatively agree with those observed in the laboratory experiment (see final values of Fig. 2).
Discussion
Our main finding is that the type of information available to the population has a dramatic effect on the possibility of reaching general consensus. In the local treatment we have observed that the population segregates into two spatially isolated groups, one for each convention. We stress that we have never observed convergence to adopting a unique convention in this setup. On the contrary, when global information is provided, people can reach higher levels of global coordination, albeit we observe two different scenarios. In the first one, equilibrium between the two conventions remains stable during the whole experimental session and people cannot recognize a dominant convention in the population. This leads to a final population structure that is very similar to that observed in the local treatment. However, when equilibrium between the two conventions is not stable and an appreciable majority begins to form, the knowledge of the convention dominating the population allows people to reach a consensus and to aggregate in a unique monomorphic cluster.
Beyond our findings in terms of consensus, we have been able to extract the behavioral pattern of the average individual. Thus, we have observed that, given that changing conventions is costly, subjects accordingly try to move when they are in a neighborhood with few occupied cells and those occupied adhere more to the opposite convention and only change convention when they are in the presence of several neighbors, almost of all them agreeing. Based on these simple and quite natural rules, we have proposed a model that allows us to study the dependence of our results on variables such as ‘world’ size, population density and longer duration of interactions. The model, which is in good qualitatively agreement with our experimental results, shows that in very small environments with only local information available, consensus can be reached as with global information, but after much longer interaction times. In larger systems, however, when global information is provided to individuals they can always converge to a unique convention in the population (given enough time), but local information alone leads to smaller coordination levels and spatial segregation. These results are qualitatively the same for a range of population densities, in so far as they are not so small as to prevent interaction, or so large that mobility is seriously hindered.
This experimental work has important implications in a number of real life contexts. Thus, our results suggest that when changing a convention is costly and interacting with the other convention detrimental, like in situations where a sizable group of people who should work together use different standards, or in collaborations where a common language is needed, population mobility is not enough to induce a common choice. Indeed, mobility would only lead to segregation by conventions and when the segregation process is completed interaction ceases. On the basis of our results, one could think that providing information on how the adoption of conventions is going could help, but as we have seen something else is required, namely that this information conveys the feeling that an overwhelming majority is forming and that it is for the best to conform to their convention. While the adoption rates are still close, the process could still end up in segregation. Therefore, providing such global information as a way of policy making to encourage consensus is not enough and should be complemented with incentives for part of the population to change their choice, so a majority begins to form. Even then, we have also seen that there are individuals who never change even when they are the last ones left of their choice. Whether this was due to a misunderstanding of the instruction or to unreasonable stubborness is debatable, but in any event it is a clear indication that one cannot expect in general to achieve perfect consensus. In fact, in a large, mobile population such subjects may end up grouping and becoming a prejudicial influence. On the other hand, the fact that people are reluctant to change conventions is in good agreement with the daily life observation of the coexistence of choices (such as different phone companies, or operating systems, or even languages). When individuals are locally satisfied because they have many neighbors with the same preference, they do not have incentives to switch to the other option or to move. Of course, in the long run the rational preference should be to go along with the majority, but as our simulations show, this may be a very long term limit (not dissimilar to the ultra long runs discussed by Young22) and therefore in practice those convention may coexist forever. Thus, it becomes quite clear that the process of convergence to consensus may certainly be complicated and, while our experiment opens the door to understanding how mobile populations evolve or not towards global agreement, further research is needed to fully unveil all the effects relevant for such an ubiquitous problem.
Methods
The use of human subjects in this experiment has been approved by the Ethics Committee of the University of Lausanne. The participants were fully informed of the nature of the experiment and signed an informed consent to participate. Their anonymity has been guaranteed at all stages of the experiment.
We conducted a total of seven experimental sessions in October 2013 in a specially equipped laboratory using the z-Tree environment8. Each session involved 20 participants and a total of 140 subjects took part in the experiment. Each session consisted of three repetitions of the same treatment played by the same group but with new random initial conditions. Participants were recruited using ORSEE11 from a subject pool that includes students from several faculties of the University of Lausanne and of the Swiss Federal Institute of Technology (EPFL).
Students read a detailed description of the experiment before playing the game. After reading the instructions, subjects had to respond to a set of control questions that insured common understanding of the game and the computation of payoffs. An English translation of the instructions distributed to subjects is provided (see SI sect. 1). Each session lasted about 90 minutes. Participants earned a certain number of points during the experiment and their final score in points was converted at an exchange rate of 1.- CHF = 30 points. The average gain per student was 33.5 CHF (about 38 USD). All statistical results have been obtained performing t-test analysis and assuming an independent observation for each new treatment. Observations are also assumed to be unpaired samples and with unequal variance.
References
Antonioni, A., Cacault, M. P., Lalive, R. & Tomassini, M. Coordination on networks: Does topology matter? PLoS ONE 8, e55033 (2013).
Bacharach, M. J. & Bernasconi, M. The variable frame theory of focal points: an experimental study. Games Econ. Behav. 19, 1–45 (1997).
Benito, J. M. et al. Sequential versus simultaneous Schelling models: Experimental evidence. J. Conflict Resolut. 55, 60–84 (2010).
Camerer, C. F. Behavioral Game Theory (Princeton University Press, 2003).
Collard, P. & Mesmoudi, S. How to prevent intolerant agents from high segregation. Advances in Artificial Life (ECAL 2011) 168–175 (2011).
Cooper, R. et al. Selection criteria in coordination games: some experimental results. Am. Econ. Rev. 80, 218–233 (1990).
Dall'Asta, L., Castellano, C. & Marsili, M. Statistical physics of the Schelling model of segregation. J. Stat. Mech. L07002 (2008).
Fischbacher, U. z-Tree: Zürich toolbox for ready-made economic experiments. Exp. Econ. 10, 171–178 (2007).
Fudemberg, D. & Levine, D. K. The theory of Learning in Games (MIT Press, Cambridge, MA, 1998).
Gleeson, J. P., Cellai, D., Onnela, J.-P., Porter, M. A. & Reed-Tsochas, F. A simple generative model of collective online behavior. Proc. Natl. Acad. Sci. USA 111, 10411–10415 (2014).
Greiner, B. An Online Recruitment System for Economic Experiments in Forschung und wissenschaftliches Rechnen GWDG Bericht,. Vol. 63, 79–93. (2004 01 Göttingen,).
Huyck, J. B. V., Battalio, R. C. & Beil, R. O. Tacit coordination games, strategic uncertainty and coordination failure. Am. Econ. Rev. 80, 234–249 (1990).
Mehta, J., Starmer, C. & Sudgen, R. Focal points in pure coordination games: an experimental investigation. Theor. Decis. 36, 163–185 (1994).
Mehta, J., Starmer, C. & Sudgen, R. The nature of salience: an experimental investigation of pure coordination games. Am. Econ. Rev. 84, 658–673 (1994).
Mukhherjee, P., Sen, S. & Airiau, S. Norm emergence under constrained interaction in diverse societies. Procs. of the 7th Int. Conf. on Autonomous Agents and Multiagent Systems, 779–786 (2008).
Romero, D. M., Meeder, B. & Kleinberg, J. Differences in the mechanics of information diffusion across topics: idioms, political hashtags and complex contagion on twitter Procs. of the 20th Int. Conf. on WWW, 695–704 (2011).
Schelling, T. The Strategy of Conflict (Harvard University Press, Cambridge, MA, 1960).
Schelling, T. Micromotives and Macrobehavior (Norton, NY, 1978).
Skyrms, B. The Stag Hunt and the Evolution of Social Structure (Cambridge University Press, Cambridge, UK, 2004).
Vincenz, F., Corten, R. & Buskens, V. Equilibrium selection in network coordination games: an experimental study. Rev. Net. Econ. 11 (2012).
Weibull, J. W. Evolutionary Game Theory (MIT Press, Boston, MA, 1995).
Young, H. P. Individual Strategy and Social Structure (Princeton University Press, Princeton, 1998).
Young, P. Social norms (Palgrave Macmillan, Basingstoke, UK, 2008).
Zhang, J. A dynamic model of residential segregation. J. Math. Sociol. 28, 147–170 (2004).
Acknowledgements
We gratefully acknowledge financial support by the Swiss National Science Foundation (under grant n. 200020-143224) and by the Rectors' Conference of the Swiss Universities (under grant n. 26058983). This work has been supported in part by Ministerio de Economía y Competitividad (Spain) through grant PRODIEVO.
Author information
Authors and Affiliations
Contributions
A.A., A.S. and M.T. conceived and designed the experimental setting. A.A. prepared and performed the experiments. A.A., A.S. and M.T. analyzed the data and wrote the paper.
Ethics declarations
Competing interests
The authors declare no competing financial interests.
Electronic supplementary material
Supplementary Information
Supplementary Information
Rights and permissions
This work is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International License. The images or other third party material in this article are included in the article's Creative Commons license, unless indicated otherwise in the credit line; if the material is not included under the Creative Commons license, users will need to obtain permission from the license holder in order to reproduce the material. To view a copy of this license, visit http://creativecommons.org/licenses/by-nc-sa/4.0/
About this article

Cite this article
Antonioni, A., Sanchez, A. & Tomassini, M. Global Information and Mobility Support Coordination Among Humans. Sci Rep 4, 6458 (2014). https://doi.org/10.1038/srep06458
Received:
Accepted:
Published:
DOI: https://doi.org/10.1038/srep06458
This article is cited by
-
Evolutionary games on multilayer networks: coordination and equilibrium selection
Scientific Reports (2023)
-
Coordination and equilibrium selection in games: the role of local effects
Scientific Reports (2022)
-
An experimental study of network effects on coordination in asymmetric games
Scientific Reports (2019)
Comments
By submitting a comment you agree to abide by our Terms and Community Guidelines. If you find something abusive or that does not comply with our terms or guidelines please flag it as inappropriate.
