
Abstract
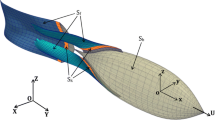
Flapping plates of typical fishlike tail shapes are simulated to investigate their locomotion performance using the multi-block Lattice Boltzmann Method (LBM) and Immersed Boundary (IB) method. Numerical results show that fishlike forked configurations have better locomotion performance compared with unforked plates. Based on our results, the caudal fin in carangiform mode has greater thrust, and the lunate tail fin in thunniform mode has higher efficiency. These findings are qualitatively consistent with biological observations of fish swimming. Analysis of wake topology shows that the wake of the forked plate consists of a chain of alternating reverse horseshoe-like vortical structures. These structures induce a backward jet and generate a positive thrust. Moreover, this backward jet has a more favorable direction compared with that behind an unforked plate.
Similar content being viewed by others


References
TRIANTAFYLLOU M. S., TECHET A. H. and HOVER F. S. Review of experimental work in biomimetic foils[J]. IEEE Journal of Oceanic Engineering, 2004, 29(3): 585–594.
MITTAL R. Computational modeling in biohydrodynamics: Trends, challenges, and recent advances[J]. IEEE Journal of Oceanic Engineering, 2004, 29(3): 595–604.
ZHANG J., LIU N. S. and LU X. Y. Locomotion of a passively flapping flat plate[J]. Journal of Fluid Mechanics, 2010, 659: 43–68.
Von ELLENRIEDER K. D., PARKER K. and SORIA J. Flow structures behind a heaving and pitching finite-span wing[J]. Journal of Fluid Mechanics, 2003, 490: 129–138.
BUCHHOLZ J. H. J., SMITS A. J. On the evolution of the wake structure produced by a low-aspect-ratio pitching panel[J]. Journal of Fluid Mechanics, 2003, 546: 433–443.
BUCHHOLZ J. H. J., SMITS A. J. The wake structure and thrust performance of a rigid low-aspect-ratio pitching panel[J]. Journal of Fluid Mechanics, 2008, 603: 331–365.
BLONDEAUX P., FORNARELLI F. and GUGLIELMINI L. et al. Numerical experiments on flapping foils mimicking fish-like locomotion[J]. Physics of Fluids, 2005, 17(11): 113601.
DONG H., MITTAL R. and NAJJAR F. M. Wake topology and hydrodynamic performance of low-aspect-ratio flapping foils[J]. Journal of Fluid Mechanics, 2006, 566: 309–343.
GUERRERO J. E. Wake signature and Strouhal number dependence of finite-span flapping wings[J]. Journal of Bionic Engineering, 2010, 7(Suppl.): 109–122.
DRUCKER E. G., LAUDER G. V. Wake dynamics and locomotor function in fishes: Interpreting evolutionary patterns in pectoral fin design[J]. Integrative and Comparative Biology, 2002, 42(5): 997–1008.
BORAZJANI I., SOTIROPOULOS F. Numerical investigation of the hydrodynamics of carangiform swimming in the transitional and inertial flow regimes[J]. Journal of Experimental Biology, 2008, 211(10): 1541–1558.
BORAZJANI I., SOTIROPOULOS F. On the role of form and kinematics on the hydrodynamics of self-propelled body/caudal fin swimming[J]. Journal of Experimental Biology, 2010, 213(1): 89–107.
WANG Zhi-dong, LAO Yi-jia and LI Li-jun et al. Experiment on the characteristics of 3-D vortex ring behind a flexible oscillating caudal fin[J]. Journal of Hydrodynamics, 2010, 22(3): 393–401.
WALKER J. A., WESTNEAT M. W. Performance limits of labriform propulsion and correlates with fin shape and motion[J]. Journal of Experimental Biology, 2002, 205(5): 177–187.
TAYLOR G. K., NUDDS R. L. and THOMAS A. L. R. Flying and swimming animals cruise at a Strouhal number tuned for high power efficiency[J]. Nature, 2003, 425(6959): 707–711.
PESKIN C. S. The immersed boundary method[J]. Acta Numerica, 2002, 11: 479–517.
HUANG W. X., SHIN S. J. and SUNG H. J. Simulation of flexible filaments in a uniform flow by the immersed boundary method[J]. Journal of Computational Physics, 2007, 226(2): 2206–2228.
GAO T., LU X.-Y. Insect normal hovering flight in ground effect[J]. Physics of Fluids, 2008, 20(8): 087101.
Author information
Authors and Affiliations
Corresponding author
Additional information
Project supported by the National Natural Science Foundation of China (Grant No. 10832010), the Innovation Project of the Chinese Academy of Sciences (Grant No. KJCX2-YWL05) and the 111 Project (Grant No. B07033).
Biography: LI Gao-jin (1987-), Male, Master
Rights and permissions
About this article
Cite this article
Li, Gj., Zhu, L. & Lu, Xy. Numerical Studies on Locomotion Perfromance of Fishlike Tail Fins. J Hydrodyn 24, 488–495 (2012). https://doi.org/10.1016/S1001-6058(11)60270-9
Received:
Revised:
Published:
Issue Date:
DOI: https://doi.org/10.1016/S1001-6058(11)60270-9