
Abstract
Dynamic trajectory planning (DTP) and Dynamic trajectory tracking (DTT) are the real-time mutual coupling in the process of the dynamic lateral obstacle avoidance (DLOA) of connected and automated vehicles (CAVs). Meanwhile, the varying velocity and acceleration of obstacle vehicles (OVs) increase the difficulties of DTP. Furthermore, the parameters perturbation in CAVs (such as mass and cornering stiffness), the varying velocities of CAVs and the signal disturbances, raise the difficulties of DTT. Therefore, the DLOA is challenging due to the interaction of the above multiple factors. To address the problem, this paper proposes a robust gain-scheduling control strategy of DLOA for CAVs. The strategy is divided into two modules namely DTP and DTT, and the two modules cooperate with each other in real time. In the module of DTP, the optimal trajectory considering the efficiency, passenger comfort and safety is real-time optimized in the dynamic safe limit which is real time predicted according to the information from CAVs and OVs. In the module of DTT, the real-time trajectory reference is tracked. Robust gain-scheduling control is realized to cope with variation of real-time trajectory reference, varying velocity, parameters perturbation and signal disturbances during the process of DLOA. The simulation results indicate that the strategy can effectively achieve DLOA maintaining the vehicle stability across various working conditions.
Similar content being viewed by others

Abbreviations
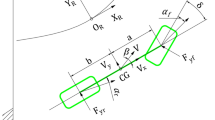
- F 1, F 2, F 3, F 4 :
-
lateral and longitudinal force of front and rear axles
- ΔF x1, ΔF x2, ΔF x3, ΔF x4 :
-
altered longitudinal force of each tire
- k f, k r :
-
cornering stiffness of the front and rear tires
- u m, u sx, u sy :
-
velocity, longitudinal velocity and lateral velocity in the vehicle coordinate system
- δ f :
-
steering angle
- \(\beta ,\dot \beta \) :
-
sideslip angle, velocity of sideslip angle
- \(\dot \psi ,\ddot \psi \) :
-
heading angle and yaw velocity
- a, b :
-
distance from the center of mass to the front axle and rear axle
- l w :
-
width of the vehicle
- m, I zz :
-
mass and yaw moment of inertia
- ΔT x1, ΔT x2, ΔT x3, ΔT x4 :
-
altered driving torque of each tire
- Y r :
-
lateral displacement of the curve
- Re :
-
lane width
- X r :
-
longitudinal displacement
- D :
-
longitudinal length of the curve
- u gx, u gy :
-
longitudinal and lateral velocity in the global coordinate system
- u f0, a f :
-
initial velocity and acceleration of OVs
- t p :
-
predicted time from the real-time position to the limit position
- u fr :
-
velocity of OVs
- a fr :
-
longitudinal acceleration of OVs
- l zc :
-
half vehicle width
- l zb :
-
longitudinal distance from the centroid to limit position of CAVs
- l fb :
-
longitudinal distance from the centroid to limit position of OVs
- D f0 :
-
initial longitudinal distance between the CAVs and OVs at start time
- a cy :
-
maximum lateral acceleration of the trajectory
- a ym :
-
maximum safe lateral acceleration
- t w :
-
completed time of lateral obstacle avoidance
- t max :
-
maximum allowed cost time of lateral obstacle avoidance
- η :
-
factor adjusting efficiency and passenger comfort
- t p :
-
used time of lane change
- Y r0, Y r1, Y r2 :
-
lateral displacement of the reference trajectory at neighbored time instants
- T :
-
sample time
- w p :
-
related to external disturbance
- W u :
-
used to constrain control output
- S :
-
defined as the sensitivity function
- d :
-
disturbance
References
Anderson, S. J., Peters, S. C. and Pilutti, T. E. (2010). An optimal-control-based framework for trajectory planning, threat assessment, and semi-autonomous control of passenger vehicles in hazard avoidance scenarios. Int. J. Vehicle Autonomous Systems 8, 2–4, 190–216.
Apkarian, P., Gahinet, P. and Becker, G. (1995). Self-scheduled H∞ control of linear parameter-varying systems: a design example. Automatica 31, 9, 1251–1261.
Bevly, D., Cao, X. and Gordon, M. (2016). Lane change and merge maneuvers for connected and automated vehicles: A survey. IEEE Trans. Intelligent Vehicles 1, 1, 105–120.
Cao, H., Song, X. and Zhao, S. (2017). An optimal model-based trajectory following architecture synthesizing the lateral adaptive preview strategy and longitudinal velocity planning for highly automated vehicle. Vehicle System Dynamics 55, 8, 1143–1188.
Cui, Q., Ding, R. and Wu, X. (2020). A new strategy for rear-end collision avoidance via autonomous steering and differential braking in highway driving. Vehicle System Dynamics 58, 6, 1–25.
Erlien, S. M., Fujita, S. and Gerdes, J. C. (2015). Shared steering control using safe envelopes for obstacle avoidance and vehicle stability. IEEE Trans. Intelligent Transportation Systems 17, 2, 441–451.
Fergani, S., Olivier, S. and Luc D. (2015). An LPV/H∞ integrated vehicle dynamic controller. IEEE Trans. Vehicular Technology 65, 4, 1880–1889.
Flores, C., Merdrignac, P. and Charette, R. (2018). A cooperative car-following/emergency braking system with prediction-based pedestrian avoidance capabilities. IEEE Trans. Intelligent Transportation Systems 20, 5, 1837–1846.
Gao, Y., Gordon, T. and Lidberg, M. (2019). Optimal control of brakes and steering for autonomous collision avoidance using modified Hamiltonian algorithm. Vehicle System Dynamics 57, 8, 1224–1240.
Gao, Y., Lin, T. and Borrelli, F. (2010). Predictive control of autonomous ground vehicles with obstacle avoidance on slippery roads. Dynamic Systems and Control Conf. 44175, 265–272.
Glaser, S., Vanholme, B. and Mammar, S. (2010). Maneuver-based trajectory planning for highly autonomous vehicles on real road with traffic and driver interaction. IEEE Trans. Intelligent Transportation Systems 11, 3, 589–606.
Gu, D. W., Petko, H. P. and Mihail, M. K. (2005). Robust Control Design with MATLAB. Springer. London, UK.
Guo, H., Liu, J. and Cao, D. (2018). Dual-envelop-oriented moving horizon path tracking control for fully automated vehicles. Mechatronics, 50, 422–433.
Guo, J., Luo, Y. and Li, K. (2019). Robust gain-scheduling automatic steering control of unmanned ground vehicles under velocity-varying motion. Vehicle System Dynamics 57, 4, 595–616.
He, X., Liu, Y. and Lv, C. (2019). Emergency steering control of autonomous vehicle for collision avoidance and stabilization. Vehicle System Dynamics 57, 8, 1163–1187.
Hu, C., Jing, H. and Wang, R. (2016). Robust H∞ output-feedback control for path following of autonomous ground vehicles. Mechanical Systems and Signal Processing, 70, 414–427.
Ji, J., Khajepour, A. and Melek, W. W. (2016). Path planning and tracking for vehicle collision avoidance based on model predictive control with multiconstraints. IEEE Trans. Vehicular Technology 66, 2, 952–964.
Jula, H., Kosmatopoulos, E. B. and Ioannou, P. A. (2000). Collision avoidance analysis for lane changing and merging. IEEE Trans. Vehicular Technology 49, 6, 2295–2308.
Kanaris, A., Kosmatopoulos, E. B. and Loannou, P. A. (2001). Strategies and spacing requirements for lane changing and merging in automated highway systems. IEEE Trans. Vehicular Technology 50, 6, 1568–1581.
Kim, W., Kim, D. and Yi, K. (2012). Development of a path-tracking control system based on model predictive control using infrastructure sensors. Vehicle System Dynamics 50, 6, 1001–1023.
Li, M., Jia, Y. and Du, J. (2014). LPV control with decoupling performance of 4WS vehicles under velocity-varying motion. IEEE Trans. Control Systems Technology 22, 5, 1708–1724.
Lian, Y., Wang, X. and Tian, Y. (2018). Lateral collision avoidance robust control of electric vehicles combining a lane-changing model based on vehicle edge turning trajectory and a vehicle semi-uncertainty dynamic model. Int. J. Automotive Technology 19, 2, 331–343.
Liu, K., Gong, J. and Kurt, A. (2018). Dynamic modeling and control of high-speed automated vehicles for lane change maneuver. IEEE Trans. Intelligent Vehicles 3, 3, 329–339.
Luo, Y., Xiang, Y. and Cao, K. (2016). A dynamic automated lane change maneuver based on vehicle-to-vehicle communication. Transportation Research Part C: Emerging Technologies, 62, 87–102.
Mukhtar, A., Xia, L. and Tang, T. B. (2015). Vehicle detection techniques for collision avoidance systems: A review. IEEE Trans. Intelligent Transportation Systems 16, 5, 2318–2338.
Naranjo, J. E., Gonzalez, C. and Garcia, R. (2008). Lane-change fuzzy control in autonomous vehicles for the overtaking maneuver. IEEE Trans. Intelligent Transportation Systems 9, 3, 438–450.
Noble, A. M., Dingus, T. A. and Doerzaph, Z. R. (2016). Influence of in-vehicle adaptive stop display on driving behavior and safety. IEEE Trans. Intelligent Transportation Systems 17, 10, 2767–2776.
Shah, J., Best, M. and Benmimoun, A. (2015). Autonomous rear-end collision avoidance using an electric power steering system. Proc. Institution of Mechanical Engineers, Part D: J. Automobile Engineering 29, 12, 1638–1655.
Sharp, R. S. and Valtetsiotis, V. (2001). Optimal preview car steering control. Vehicle System Dynamics 35, suppl.1, 101–117.
Shim, T., Adireddy, G. and Yuan, H. (2012). Autonomous vehicle collision avoidance system using path planning and model-predictive-control-based active front steering and wheel torque control. Proc. Institution of Mechanical Engineers, Part D: J. Automobile Engineering 226, 6, 767–778.
Song, W., Yang, Y. and Fu, M. (2017). Real-time obstacles detection and status classification for collision warning in a vehicle active safety system [J]. IEEE Trans. Intelligent Transportation Systems 19, 3, 758–773.
Soudbakhsh, D., Eskandarian, A. and Chichka, D. (2013). Vehicle collision avoidance maneuvers with limited lateral acceleration using optimal trajectory control. J. Dynamic Systems, Measurement, and Control 135, 4, 1–12.
Tamaddoni, S. H., Taheri, S. and Ahmadian, M. (2011). Optimal preview game theory approach to vehicle stability controller design. Vehicle System Dynamics 49, 12, 1967–1979.
Wang, R., Zhang, H. and Wang, J. (2013). Linear parameter-varying controller design for four-wheel independently actuated electric ground vehicles with active steering systems. IEEE Trans. Control Systems Technology 22, 4, 1281–1296.
World Health Organization (WHO) (2015). Top 10 causes of death worldwide. Available from: http://www.who.int/mediacentre/factsheets/fs310/en/
Yang, D., Zheng, S. and Wen, C. (2018). A dynamic lane-changing trajectory planning model for automated vehicles. Transportation Research Part C: Emerging Technologies, 95, 228–247.
You, F., Zhang, R. and Lie, G. (2015). Trajectory planning and tracking control for autonomous lane change maneuver based on the cooperative vehicle infrastructure system. Expert Systems with Applications 42, 14, 5932–5946.
Zhang, Y., Chen, H. and Waslander, S. L. (2018). Hybrid trajectory planning for autonomous driving in highly constrained environments. IEEE Access, 6, 32800–32819.
Zhao, W., Qin, X. and Wang, C. (2018). Yaw and lateral stability control for four-wheel steer-by-wire system. IEEE/ASME Trans. Mechatronics 23, 6, 2628–2637.
Acknowledgement
This work was supported by National Natural Science Foundation of China (Grant No. 52262053), by Basic Research Project of Yunnan Science and Technology Program (202101AT070108), and by the Xingdian Talent Support Planning Project.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Nie, Z., Li, Z., Wang, W. et al. Robust Gain-scheduling Control of Dynamic Lateral Obstacle Avoidance for Connected and Automated Vehicles. Int.J Automot. Technol. 24, 63–78 (2023). https://doi.org/10.1007/s12239-023-0007-8
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12239-023-0007-8