
Abstract
Based on the mechanical threshold stress model and the visco-plastic self-consistent algorithm, a modified constitutive model is developed to model static strain aging and dynamic strain aging for application to a non-heat treatable aluminum alloy, AA5754-O. The implementation is based on a combination of the evolution of dislocation density and the effect of solutes on both mobile dislocations and forest dislocations. Using this model, the stress–strain behavior of AA5754-O is simulated in multi-path, multi-temperature, and variable strain rate tensile tests. The low temperature and strain rate sensitivities of the modified mechanical threshold stress model in the dynamic strain aging regime are successfully accounted for. The results show quantitative agreement with experimental data from multiple sources.












Similar content being viewed by others
References
H. Lim, C. C. Battaile; J. L. Brown and C. R. Weinberger: Model. Simul. Mater. Sci. Eng., 2016, vol. 24, p. 55018.
U. F. Kocks: Philos. Mag., 1966, vol. 13, pp. 541–566.
J.L. Amorós, A.H. Cottrell, A. Seeger: Deformation and Flow of Solids/Verformung Und Fliessen Des Festkörpers, Springer, Berlin (1956).
P. S. Follansbee: Fundamentals of Strength, 1st ed., John Wiley & Sons, Inc., Hoboken, NJ, USA, 2013.
A. H. Cottrell and B. A. Bilby: Proc. Phys. Soc. Sect. A, 1949, vol. 62, p. 49.
H. Mecking and U. F. Kocks: Acta Metall., 1981, vol. 29, pp. 1865–75.
A. Van Den Beukel and U. F. Kocks: Acta Metall., 1982, vol. 30, pp. 1027–34.
U.F. Kocks, A.S. Argon, and M.F. Ashby: Thermodynamics and Kinetics of Slip. Pergamon Press, Oxford, 1975.
P. S. Follansbee and U. F. Kocks: Acta Metall., 1988, vol. 36, pp. 81–93.
A.J. Beaudoin, U.F. Kocks, S.R. MacEwen, S.R. Chen, and M.G. Stout: Hot Deformation of Aluminum Alloys II Symposium, 1999.
S. Kok, A. J. Beaudoin, and D. A. Tortorelli: Int. J. Plast., 2002, vol. 18, pp. 715–41.
B. Banerjee and A. Bhawalkar: J. Mech. Mater. Struct., 2008, vol. 3, pp. 391–424.
M. A. Iadicola, L. Hu, A. D. Rollett, and T. Foecke: Int. J. Solids Struct., 2012, vol. 49, pp. 3507–16.
A. van den Beukel: Scr. Metall., 1983, vol. 17, pp. 659–63.
N. Louat: Scr. Metall., 1981, vol. 15, pp. 1167–70.
P. Franciosi: Acta Metall., 1985, vol. 33, pp. 1601–12.
P. S. Follansbee: Metall. Mater. Trans. A, 2016, vol. 47, pp. 4455–66.
Y. Estrin and L.P. Kubin: Acta Metall., 1986, vol. 34, pp. 2455–64.
L. P. Kubin, Y. Estrin, and C. Perrier: Acta Metall. Mater., 1992, vol. 40, pp. 1037–44.
C. Fressengeas, A. J. Beaudoin, M. Lebyodkin, L. P. Kubin, and Y. Estrin: Mater. Sci. Eng. A, 2005, vol. 400–401, pp. 226–30.
R. A. Lebensohn and C. N. Tomé: Acta Metall. Mater., 1993, vol. 41, pp. 2611–24.
A. H. Cottrell: Dislocations and Plastic Flow in Crystals, 1st ed., Oxford University Press, New York, 1953.
J. Friedel: Dislocations, 1st ed., Addison-Wesley Publishing Company Inc, Massachusetts, 1964.
E. Nes: Acta Metall. Mater., 1995, vol. 43, pp. 2189–2207.
M. Pham, M. Iadicola, A. Creuziger, L. Hu, and A. D. Rollett: Int. J. Plast., 2015, vol. 75, pp. 226–43.
N. Abedrabbo, F. Pourboghrat, and J. Carsley: Int. J. Plast., 2007, vol. 23, pp. 841–75.
F. Ozturk, S. Toros, and H. Pekel: Mater. Sci. Technol., 2009, vol. 25, pp. 919–24.
K. Zhao, R. Fan and L. Wang: J. Mater. Eng. Perform., 2016, vol. 25, pp. 781–89.
J. Cheng and S. Nemat-Nasser: Acta Mater., 2000, vol. 48, pp. 3131–44.
M. A. Soare and W. A. Curtin: Acta Mater., 2008, vol. 56, pp. 4046–61.
M. A. Soare and W. A. Curtin: Acta Mater., 2008, vol. 56, pp. 4091–4101.
F. Zhang, A. F. Bower, and W. A. Curtin: Int. J. Numer. Methods Eng., 2011, vol. 86, pp. 70–92.
J. Cheng, S. Nemat-Nasser, and W. Guo: Mech. Mater., 2001, vol. 33, pp. 603–16.
S. Nemat-Nasser and Y. Li: Acta Mater., 1998, vol. 46, pp. 565–77.
W. A. Curtin, D. L. Olmsted, and L. G. Hector: Nat. Mater., 2006, vol. 5, pp. 875–80.
S. M. Keralavarma, A. F. Bower, and W. A. Curtin: Nat. Commun., 2014, vol. 5, pp. 4604–12.
J. D. Eshelby: Ann. Phys., 1957, vol. 456, pp. 116–21.
P. Franciosi, M. Berveiller, and A. Zaoui: Acta Metall., 1980, vol. 28, pp. 273–83.
A. S. Argon and E. Orowan: Physics of Strength and Plasticity, Cambridge, M.I.T. Press, 1969.
U. Essmann and H. Mughrabi: Philos. Mag. A, 1979, vol. 40, pp. 731–56.
L.P. Kubin and Y. Estrin: Acta Metall. Mater., 1990, vol. 38, pp. 697–708.
B. S. Anglin, B. T. Gockel, and A. D. Rollett: Integr. Mater. Manuf. Innov., 2016, vol. 5, p. 11.
L. Hu, A. D. Rollett, M. Iadicola, T. Foecke, and S. Banovic: Metall. Mater. Trans. A, 2012, vol. 43, pp. 854–69.
MATLAB: Version 8.5.0 (R2015a), The MathWorks Inc., Natick, 2015.
M.S. Pham, A. Creuziger, M. Iadicola, and A.D. Rollett: J. Mech. Phys. Solids, 2016, DOI:10.1016/j.jmps.2016.08.011.
Acknowledgments
ADR and SM acknowledge support from the Boeing company for this work. Discussions with M.S. Pham of Imperial College, London, Paul Follansbee of St. Vincent College, and W.A. Curtin of the Ecole Polytechnique Federale de Lausanne (EPFL) are gratefully acknowledged. Support by the NIST Center for Automotive Lightweighting is also acknowledged.
Author information
Authors and Affiliations
Corresponding author
Additional information
Manuscript submitted December 2, 2016.
Appendices
Appendix I: The Derivation of \( \tau_{\text{e}} \) in the Modified MTS Model
In the main paper, a brief derivation of \( \tau_{\text{e}} \) was described. Here, we provide a more complete description of the definition of \( \tau_{\text{e}} \). For more details, the reader is referred to Curtin et al.[30,31,32,35]
In the expression of \( \tau_{\text{es}} \), we introduce an extra variable, \( \delta \), in our equation. As mentioned before, \( \delta \) is described by the equation given below:
Here \( R' \) is a dimensionless pre-factor. In Curtin et al.’s, \( R' \) was described as
where \( c \), \( \bar{w} \), \( b \), and \( \Delta \bar{G}_{\text{W}} \) were introduced previously. A is the line tension energy per unit length of dislocation, which can be estimated by
where \( v \) is the Poisson ratio of the material. Here both \( A \times b \) and \( \Delta \bar{G}_{\text{W}} \) can be normalized by \( \mu b^{3} \). Only \( 8.7\frac{{2c\bar{w}}}{\sqrt 3 b} \) is left on the right of the expression. Curtin et al. showed that \( \bar{w} \) is on the scale of 7.5 \( b \), and they estimated \( R^{\prime} \) is 0.4 for Al-Mg dilute alloys. Thus, for simplicity in our model, we assume a fixed value of \( R^{\prime} \) as a characteristic constant. Note that we also include the bulk solute concentration in \( R' \) for simplification. In order to investigate a related alloy with different bulk solute concentrations, \( R' \) can be further expanded to be a function of solute concentration, \( C \).
Figure A1 shows two curves calculated from the two characteristic functions, \( \left[ {1 - \exp \left( {1 - \exp \left( x \right)} \right) } \right] \) (Figure A1(a)) and \( \tanh \left( x \right) \) (Figure A1(b)), in a DSA simulation. From a mathematical perspective, the first one gives a temperature-dependent critical point above which DSA will be invoked at a given strain rate. The second function, \( \tanh \left( x \right) \), washes away the DSA effect at high temperatures. Note that both the X and Y axes in the two plots are normalized.

Two characteristic functions, \( \left[ {1 - \exp \left( {1 - \exp \left( x \right)} \right)} \right] \) (a) and \( \tanh \left( x \right) \) (b), are plotted. Note that, both temperature and energy scale are normalized in two plots
Finally, the overall expression of \( \tau_{\text{e}} \) is shown below:
Appendix II: Matlab Routine for SSA and DSA Simulation
By using MATLAB[44] as a platform, similar optimization routines are applied to optimize the MTS parameters in SSA and DSA. In DSA modeling, the simulation routine is more straightforward. After reading the experimental data and the initial estimation of MTS, the main function calls the VPSC program and reads back the simulation data from VPSC outputs, then the main function (including Eqs. [2] through [7] and [21] through [29]) calculates the difference between the two sets of data and loops again until the optimization criterion is satisfied as mentioned above. The DSA simulation routine is shown in Figure A2.

Block diagram for the parameter fitting procedure in DSA modeling
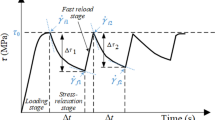
However, the SSA simulation routine needs two segments to finish one loop. In SSA simulation routine, the main loop also starts with reading the experimental data into MATLAB. After the experimental data have been read, the MATLAB routine calls the VPSC program and specifies the explicit strain path, prescribed strain and initial MTS parameters as input for VPSC program. Once the VPSC has read those inputs, it starts calculating (including Eqs. [2] through [7]) until the end of simulation in segment 1. Then, the program outputs the results in segment 1 and preserves the present states for the flow stress and texture. After that, MATLAB calculates the updated MTS parameters, here, the new value of \( \Delta \tau_{\text{SSA}} \), \( \tau_{\text{eini}} \), \( \tau_{\text{es0}}, \) and \( \theta_{0} \) by using the SSA model (Eqs. [8] through [15]) and SSR (Eqs. [16] through [20]). The newly calculated MTS parameters are written in the input file for the next VPSC simulation in segment 2. Once the updating finishes, the MATLAB routine calls VPSC again, and this time, the VPSC program reads back in the updated input file with the preserved output file and completes the rest of the simulation. The optimization routine is aimed at generating the best fit and optimizing the value of the unknown parameters. The schematic of this fitting routine is shown in Figure A3.

Block diagram for the parameter fitting procedure in SSA modeling
Note that the input requirement of MTS parameters in the VPSC program is at the “slip system” level (microscopic level). When calculating the hardening rate for the second stage, we arbitrarily chose the Taylor factor equal to 2.8 for converting between the value of the initial evolution structure, \( \tau_{\text{eini}} \) (microscopic level) to \( \sigma_{\text{eini}} \) (macroscopic level). The next section shows the explicit values of the parameters in the SSA and DSA simulation.
Appendix III: The Tables of Relevant MTS Parameters for SSA and DSA
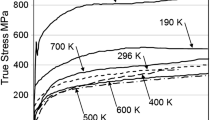
Note that, because of the discrepancies between the different data sources, the yield stress and UTS are quite different as Table II shows. Comparing Figures 1 and 8, the evolution in flow stress of the different source materials is also different at equivalent test conditions. Such stress differences will affect the MTS parameters, e.g., \( \hat{\tau }_{\text{a}} \), \( \hat{\tau }_{{{\text{es}}0}} \). Tables VI and VII show more details. Therefore, we used two different sets of MTS parameters in order to obtain acceptable fits for the SSA and DSA fittings.
Rights and permissions
About this article

Cite this article
Feng, Y., Mandal, S., Gockel, B. et al. Extension of the Mechanical Threshold Stress Model to Static and Dynamic Strain Aging: Application to AA5754-O. Metall Mater Trans A 48, 5591–5607 (2017). https://doi.org/10.1007/s11661-017-4276-6
Received:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11661-017-4276-6