
Abstract
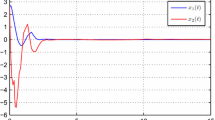
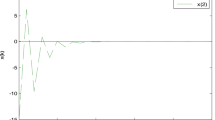
This paper considers the problem of \(H \infty \) observer-based sliding mode control for singularly perturbed systems with input nonlinearities. First, a proper observer is designed such that the observer error system with disturbance attenuation level is asymptotically stable. Then, an observer-based sliding surface is constructed under which a criterion for the input-to-state stability (ISS) of the sliding mode dynamics with respect to the observer error is obtained via linear matrix inequality. The criterion presented is independent of the small parameter, and the upper bound for ISS can be obtained efficiently. In addition, a sliding mode control law is synthesized to guarantee the reachability of the sliding surface in the state estimation space. Finally, a numerical example is presented to demonstrate the effectiveness of the proposed theoretical results.



Similar content being viewed by others

References
Petersen, I.R., Tempo, R.: Robust control of uncertain systems: classical results and recent developments. Automatica 50, 1315–1335 (2014)
Utkin, V.I.: Variable structure systems with sliding modes. IEEE Trans. Autom. Control 22, 212–222 (1977)
Utkin, V.I.: Sliding Modes in Control and Optimization. Springer, Berlin (1992)
Xu, B., Yang, C.G., Shi, Z.K.: Reinforcement learning output feedback NN control using deterministic learning technique. IEEE Trans. Neural Netw. Learn. Syst. 25, 635–641 (2014)
Xu, B., Shi, Z.K., Yang, C.G., Sun, F.C.: Composite neural dynamic surface control of a class of uncertain nonlinear systems in strict-feedback form. IEEE Trans. Cybern. 44, 2626–2634 (2014)
Hsu, K.C.: Variable structure control design for uncertain dynamic systems with sector nonlinearities. Automatica 34, 505–508 (1998)
Huang, J., Sun, L.N., Han, Z.Z., Liu, L.P.: Adaptive terminal sliding mode control for nonlinear differential inclusion systems with disturbance. Nonlinear Dyn. 72, 221–228 (2013)
Levant, A.: Transient adjustment of high-order sliding modes. In: Proceedings of the 8th international workshop on variable structure systems, pp. 1–6. Spain (2004)
Niu, Y., Daniel, W.C.: Ho: robust observer design for Itô stochastic time-delay systems via sliding mode control. Syst. Control Lett. 55, 781–793 (2006)
Castaños, F., Fridman, L.: Analysis and design of integral sliding manifolds for systems with unmatched perturbations. IEEE Trans. Autom. Control 51, 853–858 (2006)
Bandyopadhyay, B., Deepak, F., Park, Y.J.: A robust algorithm against actuator saturation using integral sliding mode and composite nonlinear feedback. In: Proceedings of the 17th World Congress the International Federation of Automatic Control Seoul, Korea, pp. 14174–14179 (2008)
Wu, L., Zheng, W.X.: Passivity-based sliding mode control of uncertain singular time-delay systems. Automatica 45, 2120–2127 (2009)
Wu, L., Daniel, W.C., Ho, : Sliding mode control of singular stochastic hybrid systems. Automatica 46, 779–783 (2010)
Gao, Y., Sun, B., Lu, G.: Passivity-based integral sliding-mode control of uncertain singularly perturbed systems. IEEE Trans. Circuits Syst. II Express Briefs 58, 386–390 (2011)
Kokotovic, P.V., Khalil, H.K., O’Reilly, J.: Singular Perturbation Methods in Control: Analysis and Design. Academic Press, London (1986)
Naidu, D.S.: Singular perturbations and time scales in control theory and applications: an overview. Dyn. Contin. Discrete Impuls. Syst. Ser. B Appl. Algorithms 9, 233–278 (2002)
Shao, Z.H.: Robust stability of two-time-scale systems with nonlinear uncertainties. IEEE Trans. Autom. Control 49, 258–261 (2004)
Shi, P., Shue, S.P., Agarwal, R.K.: Robust disturbance attenuation with stability for a class of uncertain singularly perturbed systems. Int. J. Control 70, 873–891 (1998)
Chen, S.J., Lin, J.L.: Maximal stability bounds of singularly perturbed systems. J. Frankl. Inst. 336, 1209–1218 (1999)
Wang, Z.M., Liu, W., Dai, H.H. Naidu, D.S.: Robust stabilization of model-based uncertain singularly perturbed systems with networked time-delay. In: Proceedings of the 48th IEEE conference on decision and control conference, Shanghai, P.R. China, pp. 7917–7922 (2009)
Yang, C.Y., Zhang, Q.L., Sun, J., Chai, T.Y.: Lur’e Lyapunov function and absolute stability criterion for Lur’e singularly perturbed systems. IEEE Trans. Autom. Control 56, 2666–2671 (2011)
Tuan, H.D., Hosoe, S.: Multivariable circle criteria for multiparameter singularly perturbed systems. IEEE Trans. Autom. Control 45, 720–725 (2000)
Saksena, V.R., Kokotovic, P.V.: Singular perturbation of the Popov–Kalman–Yakubovich lemma. Syst. Control Lett. 1, 65–68 (1981)
Liu, H.P., Sun, F.C., Sun, Z.Q.: Stability analysis and synthesis of fuzzy singularly perturbed systems. IEEE Trans. Fuzzy Syst. 13, 273–284 (2005)
Moraal, P.E., Grizzle, J.W.: Observer design for nonlinear systems with discrete-time measurements. IEEE Trans. Autom. Control 40, 396–404 (1995)
Lu, R.Q., Xu, Y., Xue, A.K.: \(H \infty \) filtering for singular systems with communication delays. Signal Process. 90, 1240–1248 (2010)
Ibrir, S., Xie, W.F., Su, C.Y.: Observer-based control of discrete-time Lipschitzian nonlinear systems: application to one-link flexible joint robot. Int. J. Control 78, 385–395 (2005)
Atassi, A.N., Khalil, H.K.: A separation principle for the stabilization of a class of nonlinear systems. IEEE Trans. Autom. Control 44, 1672–1687 (1999)
Jiang, Z.P., Hill, D.J., Guo, Y.: Semiglobal output feedback stabilization for the nonlinear benchmark example. In: Proceedings of the European Control Conference, Brussels, Belgium (1997)
Liberzon, D.: Observer-based quantized output feedback control of nonlinear systems. In: Proceedings of the 17th IFAC World Congress, pp. 8039–8043 (2008)
Wang, Z.M., Liu, W.: Output feedback networked control of singular perturbation. In: Proceedings of the 8th World Congress on Intelligent Control and Automation, Taipei, Taiwan, pp. 645–650 (2011)
Khalil, H.K.: Nonlinear Systems, 3rd edn. Prentice Hall, Upper Saddle River, NJ (2000)
Boyd, S., Ghaoui, L.E.L., Feron, E., Balakrishnan, V.: Linear Matrix Inequalities in System and Control Theory. SIAM, Philadelphia, PA (1994)
Acknowledgments
This paper is supported by the National Natural Science Foundation of China (11171113, 11471118), the Research Foundation of the Henan Higher Education Institutions of China (16A110006) and the Science and Technology Planning Project of Henan Province of China (162102310619).
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Liu, W., Wang, Y. & Wang, Z. H \(\infty \) observer-based sliding mode control for singularly perturbed systems with input nonlinearity. Nonlinear Dyn 85, 573–582 (2016). https://doi.org/10.1007/s11071-016-2707-3
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-016-2707-3