
Abstract
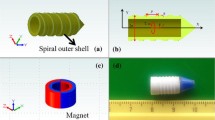
Magnetically actuated microrobots for such tools have potential accomplish procedures in biological and medical applications. In this paper, a novel magnetically actuated hybrid microrobot with hybrid motion driven by an electromagnetic actuation system has been proposed. An o-ring type permanent magnet is embedded in the hybrid microrobot as an actuator driven by rotational magnetic field which is generated by a 3 axes Helmholtz coils. It is composed by two motion mechanisms. One is the spiral jet motion moved by rotating its body. The other one is fin motion moved by vibrating its body. Because only one permanent magnet is used inside the hybrid microrobot, two motions can be controlled separately without any interference. The hybrid microrobot can change its two motions to realize multi-DOFs movement and flexibility motion. The verified experiments are conducted in the pipe. The experimental results indicate that the moving speed can be controlled by adjusting the magnetic field changing frequency and the direction of motion can be controlled by changing the magnetic field direction.





















Similar content being viewed by others


References
M.R. Basar, F. Malek, M.J. Khairudi, M. Shaharom Idris, I.M. Saleh, Int. J. Antennas Propag. 2012, 1–14 (2012)
B. Behkam and M. Sitti, 2005 IEEE/ASME International Conference on Advanced Intelligent Mechatronics, 37–42, (2005)
H. Choi, J. Choi, S. Jeong, C. Yu, J. Park, S. Park, Smart Mater. Struct. 18(11), 1–6 (2009)
Q. Fu, S. Guo, Y. Yamauchi, 2014 I.E. International Conference on Mechatronics and Automation, pp. 1995–2000, (2014).
B. Gao, S. Guo, X. Ye, Int. J. Mechatron. Autom. 1(2), 79–89 (2011)
S. Guo, T. Fukuda and K. Asaka, IEEE International Conference on Robotics and Automation, 738–743, (2002)
S. Guo, T. Fukuda, K. Asaka, IEEE/ASME Trans. Mechatronics 8(1), 136–141 (2003)
S. Guo, Q. Pan, M.B. Khamesee, J. Microsyst. Technol. 14(3), 307–314 (2008)
S. Guo, Q. Fu, Y. Yamauchi, C. Yue, 2013 I.E. International Conference on Mechatronics and Automation, 831–836, (2013)
J. Guo, S. Guo, X. Wei, Y. Wang, Int. J. Adv. Robot. Syst. 11, 1–13 (2014)
T. Honda, T. Sakashita, K. Narahashi, J. Yamasaki, J. Magn. Society of Japan 4(4–2), 1175–1178 (2001)
S. M. Jeong, H. C. Choi, S. Y. Ko, J. O. Park, and S. H. Park. IEEE International Conference on Biomedical Robotics and Biomechatronics, 482–487, (2012)
H. Keller, A. Juloski, H. Kawano, M. Bechtold, A. Kimura, H. Takizawa, R. Kuth, 2012 4th IEEE RAS & EMBS International Conference on Biomedical Robotics and Biomechatronics (BioRob), 859 – 865, (2012)
B. Kim, S. Lee, J.H. Park, J.O. Park, IEEE/ASME Trans. Mechatronics 10(1), 77–86 (2005)
N. Mir-Nasiri, H. Siswoyo Jo, Int. J. Mechatronics Automation 1(2), 132–142 (2011)
A. Moglia, A. Menciassi, M.O. Schurr, P. Dario, Biomed. Microdevices 9(2), 235–243 (2007)
A. Nacci, F. Ursino, R. La Vela, F. Matteucci, V. Mallardi, B. Fattori, Acta Otorhinolaryngol. Ital. 28(4), 206–211 (2008)
T. Okada, S. Guo, Q. Fu and Y. Yamauchi, 2012 ICME International Conference on Complex Medical Engineering, 306–311, (2012)
T. Okada, S. Guo, X. Nan, Q. Fu and Y. Yamauchi, 2012 I.E. International Conference on Mechatronics and Automation, 2405–2410, (2012)
Q. Pan and S. Guo, 2007 I.E. International Conference on Robotics and Automation, 187–192, (2007)
Q. Pan and S. Guo, 2009 I.E. International Conference on Robotics and Automation, 2995–3000, (2009)
Q. Pan, S. Guo, T. Okada, Int. J. Mechatronics and Automation 1(1), 60–69 (2011)
X. Wang, M.Q.-H. Meng, Int. J. Mechatronic Autom 1(1), 38–45 (2011)
L. Wang, G. Zhang, J.C. Luo, F. Zeng, Q.Z. Wang, S.A. Alfano, A. Katz, M. Zevallos, R.R. Alfano, Biomed. Microdevices 7(2), 111–115 (2005)
K.B. Yesin, K. Vollmers, B.J. Nelson, Int. J. Robot. Res. 25(5–6), 527–536 (2006a)
K.B. Yesin, K. Vollmers, B.J. Nelson, Springer Tracts in Advanced Robotics 21, 321–330 (2006b)
S. Yim, M. Sitti, Trans. Robot. 28(1), 183–193 (2012)
C. Yu, J. Kim, H. Choi, J. Choi, S. Jeong, K. Cha, J. Park, S. Park, Sensors Actuators A Phys. 161, 297–304 (2010)
L. Zhang, J.J. Abbott, L.X. Dong, K.E. Peyer, B.E. Kratochvil, H.X. Zhang, C. Bergeles, B.J. Nelson, Nano Lett. 9(10), 3663–3667 (2009)
Acknowledgment
This research was supported by Kagawa University Characteristic Prior Research Fund 2013.
Author information
Authors and Affiliations
Corresponding author
Electronic supplementary material
Below is the link to the electronic supplementary material.
ESM 1
(DOCX 1324 kb)
Rights and permissions
About this article

Cite this article
Fu, Q., Guo, S., Yamauchi, Y. et al. A novel hybrid microrobot using rotational magnetic field for medical applications. Biomed Microdevices 17, 31 (2015). https://doi.org/10.1007/s10544-015-9942-0
Published:
DOI: https://doi.org/10.1007/s10544-015-9942-0