
Abstract
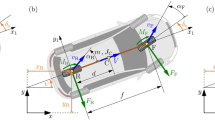
In this article, we address the control problem of unicycle path following, using a rigidly attached target point. The initial path following problem has been transformed into a reference trajectory following problem, using saturated control laws and a geometric characterization hypothesis, which links the curvature of the path to be followed with the target point. The proposed controller allows global stabilization without restrictions on initial conditions. The effectiveness of this controller is illustrated through simulations.






Similar content being viewed by others


References
Consolini, L., Piazzi, A., Tosques, M.: Motion planning for steering car-like vehicles. In: European Control Conference, Porto, Portugal (2001)
Consolini, L., Piazzi, A., Tosques, M.: A dynamic inversion based controller for path following of car-like vehicles. In: Proc. IFAC World Congress, Barcelona, Spain (2002)
Jiang, Z.P., Lefeber, E., Nijmeijer, H.: Saturated stabilization and tracking of a nonholonomic mobile robot. Syst. Control Lett. 42, 327–332 (2001)
Kanayama, Y.: Two dimensional wheeled vehicle kinematics. In: Proc. International Conference or Robotics and Automation, San Diego, California, USA, pp. 64–77 (1994)
Morin, P., Samson, C.: Trajectory tracking for non-holonomic vehicles: overview and case study. In: Proc. Fourth International Workshop on Robot Motion and Control, Puszczykowo, Poland, pp. 139–153 (2004)
Samson, C.: Control of chained systems application to path following and time-varying point-stabilization of mobile robots. IEEE Trans. Autom. Control 40, 64–76 (1995)
Samson, C., Ait-Abderrahim, K.: Feedback control of a nonholonomic wheeled cart in Cartesian space. In: Proc. International Conference or Robotics and Automation, Sacramento, California, USA (1991)
Gusev, S., Makarov, I.A.: Stabilization of programmed motion of transport vehicle with a track-laying chassis. Vestn. Leningr. Univ., Math. 22, 7–10 (1989)
Makarov, I.A.: Desired trajectory tracking control for nonholonomic mechanical systems: a case study. In: Proc. 2nd European Control Conference, Groningen, The Netherlands, pp. 1444–1447 (1993)
Egerstedt, X.H.M., Stotsky, A.: Control of mobile platforms using a virtual vehicle approach. IEEE Trans. Autom. Control 46(11), 64–76 (2001)
Pasillas-Lepine, W.: Hybrid modelling and limit cycle analysis for a class of anti-lock brake algorithms. In: International Symposium on Advanced Vehicle Control, Arnhem, The Netherlands (2004)
Teel, A.: Global stabilization and restricted tracking for multiple integrators with bounded controls. Syst. Control Lett. 40, 165–171 (1995)
Liu, W., Chitour, Y., Sontag, E.: On finite-gain stabilizability of linear systems subject to input saturation. SIAM J. Control Optim. 34(04), 1190–1219 (1996)
Chitour, Y., Liu, W., Sontag, E.: On the continuity and incremental-gain properties of certain saturated linear feedback loops. Int. J. Robust Nonlinear Control 5(5), 413–440 (1995)
Chitour, Y.: On the l p-stabilization of the double integrator subject to input saturation. ESAIM Control Optim. Calc. Var. 6, 291–331 (2001)
Acknowledgements
The authors thank E. Panteley and W. Pasillas-Lépine for their constructive remarks.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Laghrouche, S., Chitour, Y., Harmouche, M. et al. Path Following for a Target Point Attached to a Unicycle Type Vehicle. Acta Appl Math 121, 29–43 (2012). https://doi.org/10.1007/s10440-012-9672-8
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10440-012-9672-8