
Abstract
An extended belief rule-based (EBRB) system is superior to existing rule-based systems in managing several types of uncertain information and modeling complex issues effectively and efficiently. However, the accuracy and interpretability of the EBRB system still need to be enhanced by addressing the following shortcomings: the interpretability of the intermediate variables in the EBRB system should be definite and the system parameters must be effectively determined. Therefore, we distinguish discrete and continuous data types to perform sensitivity analysis twice: first, on the rule inference scheme to study the interpretability of individual matching degrees and activation weights; and second, on the rule generation scheme to examine the effect of utility values and attribute weights on the accuracy of the EBRB system. Based on the analyses, we propose a novel activation weight calculation method and parameter optimization method to enhance the interpretability and accuracy of the EBRB system, respectively. We then present three case studies to elucidate the effectiveness of the proposed methods. The results indicate that the enhanced EBRB system prevents counterintuitive and insensitive situations and obtains better accuracies than some studies.



















Similar content being viewed by others
References
Alcala-Fdez J, Fernández A, Luengo J et al (2011) KEEL data-mining software tool-data set repository, integration of algorithms and experimental analysis framework. J Mult Valued Log Soft Comput 17:255–287
British Highways Agency (2004) Value management of the structures renewal programme (Version 2.2)
Calzada A, Liu J, Wang H et al (2015) A new dynamic rule activation method for extended belief rule-based systems. IEEE Trans Knowl Data Eng 27(4):880–894
Chang LL, Zhou ZJ, Liao TJ et al (2017) Belief rule base structure and parameter joint learning under disjunctive assumption for nonlinear complex system modeling. IEEE Trans Syst Man Cybern Part A Syst (in press)
Chang LL, Zhou ZJ, You Y et al (2016) Belief rule based expert system for classification problems with new rule activation and weight calculation procedures. Inf Sci 336:75–91
Chen Y, Chen YW, Xu XB et al (2015) A data-driven approximate causal inference model using the evidential reasoning rule. Knowl Based Syst 88:264–272
Chen SM, Chien CY (2011) Parallelized genetic ant colony systems for solving the traveling salesman problem. Expert Syst Appl 38(4):3873–3883
Chen SM, Chung NY (2006) Forecasting enrollments of students by using fuzzy time series and genetic algorithms. Int J Inf Manag Sci 17(3):1–17
Chen SM, Huang CM (2003) Generating weighted fuzzy rules from relational database systems for estimating null values using genetic algorithms. IEEE Trans Fuzzy Syst 11(4):495–506
Chen YW, Yang JB, Xu DL et al (2011) Inference analysis and adaptive training for belief rule based system. Expert Syst Appl 38:12845–12860
Espinilla M, Medina J, Calzada A et al (2017) Optimizing the configuration of an heterogeneous architecture of sensors for activity recognition, using the extended belief rule-based inference methodology. Microprocess Microsyst 52:381–390
Jorgensen SB, Hangos KM (1995) Grey box modelling for control: qualitative models as a unifying framework. Int J Adapt Control Signal Process 9(6):547–562
Khan A, Jaffar MA, Shao L (2015) A modified adaptive differential evolution algorithm for color image segmentation. Knowl Inf Syst 43(3):583–797
Liu J, Martinez L, Calzada A et al (2013) A novel belief rule base representation, generation and its inference methodology. Knowl Based Syst 53:129–141
Nikolic V, Mitic VV, Kocic L et al (2017) Wind speed parameters sensitivity analysis based on fractals and neuro-fuzzy selection technique. Knowl Inf Syst 52:255–265
Pannell DJ (1997) Sensitivity analysis of normative economic models: theoretical framework and practical strategies. Agric Econ 16(2):139–152
Price K (1997) Differential evolution vs. the functions of the 2nd ICEO. In: Proceedings of the 1997 IEEE international conference of evolutionary computation, pp 153–157
Price K, Storn RM, Lampinen JA (2005) Differential evolution: a practical approach to global optimization (natural computing series). Springer, New York
Rey MI, Galende M, Fuente MJ et al (2017) Multi-objective based fuzzy rule based systems (FRBSs) for trade-off improvement in accuracy and interpretability: a rule relevance point of view. Knowl Based Syst 127:67–84
Soua B, Borgi A, Tagina M (2013) An ensemble method for fuzzy rule-based classification systems. Knowl Inf Syst 36:385–410
Storm R, Price K (1996) Minimizing the real functions of the ICEC 1996 contest by differential evolution. In: Proceedings of the 1996 IEEE international conference of evolutionary computation, pp. 842–844
Tsai PW, Pan JS, Chen SM et al (2012) Enhanced parallel cat swarm optimization based on the Taguchi method. Expert Syst Appl 39(7):6309–6319
Tsai PW, Pan JS, Chen SM et al (2008) Parallel cat swarm optimization. In: Proceeding of the 2008 international conference on machine learning and cybernetics, Kunming, China, vol 6, pp 3328–3333
Wang YM, Elhag TMS (2007) A comparison of neural network, evidential reasoning and multiple regression analysis in modelling bridge risks. Expert Syst Appl 32(2):336–348
Wang YM, Elhag TMS (2008) An adaptive neuro-fuzzy inference system for bridge risk assessment. Expert Syst Appl 34(4):3099–3106
Wang YM, Yang JB, Xu DL (2006) Environmental impact assessment using the evidential reasoning approach. Eur J Oper Res 174(3):1885–1913
Wang YM, Yang LH, Fu YG et al (2016) Dynamic rule adjustment approach for optimizing belief rule-base expert system. Knowl Based Syst 96:40–60
Xu DL, Liu J, Yang JB et al (2007) Inference and learning methodology of belief-rule-based expert system for pipeline leak detection. Expert Syst Appl 32(1):103–113
Yang JB (2001) Rule and utility based evidential reasoning approach for multiattribute decision analysis under uncertainties. Eur J Oper Res 131(1):31–61
Yang JB, Liu J, Wang J et al (2006) Belief rule-base inference methodology using the evidential reasoning approach—RIMER. IEEE Trans Syst Man Cybern Part A Syst Hum 36(2):266–285
Yang JB, Liu J, Xu DL et al (2007) Optimization models for training belief-rule-based systems. IEEE Trans Syst Man Cybern Part A Syst Hum 37(4):569–585
Yang LH, Wang YM, Lan YX et al (2017) A data envelopment analysis (DEA)-based method for rule reduction in extended belief-rule-based systems. Knowl Based Syst 123:174–187
Yang LH, Wang YM, Su Q et al (2016) Multi-attribute search framework for optimizing extended belief rule-based systems. Inf Sci 370–371:159–183
Yang LH, Wang YM, Chang LL et al (2017) A disjunctive belief rule-based expert system for bridge risk assessment with dynamic parameter optimization model. Comput Ind Eng 113:459–474
Zadeh LA (1999) Fuzzy logic and the calculi of fuzzy rules and fuzzy graphs, and fuzzy probabilities. Comput Math Appl 37(11–12):35
Zhou ZJ, Hu CH, Yang JB et al (2010) A sequential learning algorithm for online constructing belief rule based systems. Expert Syst Appl 37(2):1790–1799
Zielinski K, Peters D, Laur R (2005) Run time analysis regarding stopping criteria for differential evolution and particle swarm optimization. In: Proceeding of the 1st international conference on experiments/process/system/modelling/simulation/optimization
Acknowledgements
This research was supported by the National Natural Science Foundation of China (Nos. 61773123, 71371053, and 71501047), the Humanities and Social Science Foundation of the Ministry of Education under Grant (No. 14YJC630056), and the Natural Science Foundation of Fujian Province, China (No. 2015J01248).
Author information
Authors and Affiliations
Corresponding author
Appendices
Appendix A. Formula derivation of activation weights
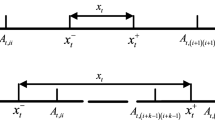
Assuming that three utility values used for the ith antecedent attribute are shown in Eq. (23), xk,i is the sample input data to generate the kth extended belief rule, and xi is the test input data to activate extended belief rules. Hence, when one antecedent attribute is in extended belief rules, the belief distribution of xk,i and xi can be simplified as follows:
For the sample input data xk,i, the following belief distributions are obtained:
For the test input data xi, the following belief distributions are obtained:
Next, based on Eqs. (A1) and (A2), the activation weight can be grouped into four situations.
-
1.
When u(Ai,1) \( \le \)xk,i\( \le \)u(Ai,2) and u(Ai,1)\( \le \)xi\( \le \)u(Ai,2), the activation weight is:
$$ \begin{aligned} w_{k} & = \theta_{k} \left( {\sum\limits_{j = 1}^{Ji} {\gamma_{i,j} \alpha_{i,j}^{k} } } \right)^{{{1 \mathord{\left/ {\vphantom {1 {\delta_{i} }}} \right. \kern-0pt} {\delta_{i} }}}} \\ & = \theta_{k} \left( {\left( {1 - \frac{{x_{k,i} }}{{u(A_{i,2} )}}} \right) \cdot \left( {1 - x_{i} } \right) + \frac{{x_{k,i} }}{{u(A_{i,2} )}} \cdot \left( {1 - u(A_{i,2} ) + x_{i} } \right) + 0 \cdot x_{i} } \right)^{{{1 \mathord{\left/ {\vphantom {1 {\delta_{i} }}} \right. \kern-0pt} {\delta_{i} }}}} \\ & = \theta_{k} \left( {1 - \frac{{x_{k,i} }}{{u(A_{i,2} )}} - x_{i} + \frac{{x_{i} x_{k,i} }}{{u(A_{i,2} )}} + \frac{{x_{k,i} }}{{u(A_{i,2} )}} - x_{k,i} + \frac{{x_{i} x_{k,i} }}{{u(A_{i,2} )}}} \right)^{{{1 \mathord{\left/ {\vphantom {1 {\delta_{i} }}} \right. \kern-0pt} {\delta_{i} }}}} \\ & = \theta_{k} \left( {1 - x_{i} - x_{k,i} + \frac{{2x_{i} x_{k,i} }}{{u(A_{i,2} )}}} \right)^{{{1 \mathord{\left/ {\vphantom {1 {\delta_{i} }}} \right. \kern-0pt} {\delta_{i} }}}} . \\ \end{aligned} $$(A3) -
2.
When u(Ai,1) \( \le \)xk,i\( \le \)u(Ai,2) and u(Ai,2) < xi\( \le \)u(Ai,3), the activation weight is:
$$ \begin{aligned} w_{k} & = \theta_{k} \left( {\sum\limits_{j = 1}^{Ji} {\gamma_{i,j} \alpha_{i,j}^{k} } } \right)^{{{1 \mathord{\left/ {\vphantom {1 {\delta_{i} }}} \right. \kern-0pt} {\delta_{i} }}}} \\ & = \theta_{k} \left( {\left( {1 - \frac{{x_{k,i} }}{{u(A_{i,2} )}}} \right) \cdot \left( {1 - x_{i} } \right) + \frac{{x_{k,i} }}{{u(A_{i,2} )}} \cdot \left( {1 + u(A_{i,2} ) - x_{i} } \right) + 0 \cdot x_{i} } \right)^{{{1 \mathord{\left/ {\vphantom {1 {\delta_{i} }}} \right. \kern-0pt} {\delta_{i} }}}} \\ & = \theta_{k} \left( {1 - \frac{{x_{k,i} }}{{u(A_{i,2} )}} - x_{i} + \frac{{x_{i} x_{k,i} }}{{u(A_{i,2} )}} + \frac{{x_{k,i} }}{{u(A_{i,2} )}} + x_{k,i} - \frac{{x_{i} x_{k,i} }}{{u(A_{i,2} )}}} \right)^{{{1 \mathord{\left/ {\vphantom {1 {\delta_{i} }}} \right. \kern-0pt} {\delta_{i} }}}} \\ & = \theta_{k} \left( {1 - x_{i} + x_{k,i} } \right)^{{{1 \mathord{\left/ {\vphantom {1 {\delta_{i} }}} \right. \kern-0pt} {\delta_{i} }}}} . \\ \end{aligned} $$(A4) -
3.
When u(Ai,2) < xk,i\( \le \)u(Ai,3) and u(Ai,1) \( \le \)xi\( \le \)u(Ai,2), the activation weight is:
$$ \begin{aligned} w_{k} & = \theta_{k} \left( {\sum\limits_{j = 1}^{Ji} {\gamma_{i,j} \alpha_{i,j}^{k} } } \right)^{{{1 \mathord{\left/ {\vphantom {1 {\delta_{i} }}} \right. \kern-0pt} {\delta_{i} }}}} \\ & = \theta_{k} \left( {0 \cdot \left( {1 - x_{i} } \right) + \frac{{1 - x_{k,i} }}{{1 - u(A_{i,2} )}} \cdot \left( {1 - u(A_{i,2} ) + x_{i} } \right) + \frac{{x_{k,i} - u(A_{i,2} )}}{{1 - u(A_{i,2} )}} \cdot x_{i} } \right)^{{{1 \mathord{\left/ {\vphantom {1 {\delta_{i} }}} \right. \kern-0pt} {\delta_{i} }}}} \\ & = \theta_{k} \left( {\frac{{1 - x_{k,i} - u(A_{i,2} ) + x_{k,i} u(A_{i,2} ) + x_{i} - x_{k,i} x_{i} + x_{k,i} x_{i} - u(A_{i,2} )x_{i} }}{{1 - u(A_{i,2} )}}} \right)^{{{1 \mathord{\left/ {\vphantom {1 {\delta_{i} }}} \right. \kern-0pt} {\delta_{i} }}}} \\ & = \theta_{k} \left( {1 + x_{i} - x_{k,i} } \right)^{{{1 \mathord{\left/ {\vphantom {1 {\delta_{i} }}} \right. \kern-0pt} {\delta_{i} }}}} . \\ \end{aligned} $$(A5) -
4.
When u(Ai,2) < xk,i\( \le \)u(Ai,3) and u(Ai,2) < xi\( \le \)u(Ai,3), the activation weight is:
$$ \begin{aligned} w_{k} & = \theta_{k} \left( {\sum\limits_{j = 1}^{Ji} {\gamma_{i,j} \alpha_{i,j}^{k} } } \right)^{{{1 \mathord{\left/ {\vphantom {1 {\delta_{i} }}} \right. \kern-0pt} {\delta_{i} }}}} \\ & = \theta_{k} \left( {0 \cdot \left( {1 - x_{i} } \right) + \frac{{1 - x_{k,i} }}{{1 - u(A_{i,2} )}} \cdot \left( {1 + u(A_{i,2} ) - x_{i} } \right) + \frac{{x_{k,i} - u(A_{i,2} )}}{{1 - u(A_{i,2} )}} \cdot x_{i} } \right)^{{{1 \mathord{\left/ {\vphantom {1 {\delta_{i} }}} \right. \kern-0pt} {\delta_{i} }}}} \\ & = \theta_{k} \left( {\frac{{1 - x_{k,i} + u(A_{i,2} ) - x_{k,i} u(A_{i,2} ) - x_{i} + x_{k,i} x_{i} + x_{k,i} x_{i} - u(A_{i,2} )x_{i} }}{{1 - u(A_{i,2} )}}} \right)^{{{1 \mathord{\left/ {\vphantom {1 {\delta_{i} }}} \right. \kern-0pt} {\delta_{i} }}}} \\ & = \theta_{k} \left( {1 + x_{k,i} + x_{i} + \frac{{2x_{i} x_{k,i} - 2x_{k,i} - 2x_{i} }}{{1 - u(A_{i,2} )}}} \right)^{{{1 \mathord{\left/ {\vphantom {1 {\delta_{i} }}} \right. \kern-0pt} {\delta_{i} }}}} . \\ \end{aligned} $$(A6)
Appendix B. Formula derivation of integrated belief degrees
Assuming that three utility values used for the consequent attribute are shown in Eq. (25), yk is the sample output data to generate the kth extended belief rule, and yl is the sample output data to generate the lth extended belief rule. Hence, based on the ER algorithm, the integrated belief degree without normalization is expressed as follows:
In addition, for the sample output data yk, the following belief distributions are obtained:
Hence, based on Eqs. (B1) and (B2), the integrated belief degree can be grouped into four situations.
-
1.
When u(D1)\( \le \)yk\( \le \)u(D2) and u(D1)\( \le \)yl\( \le \)u(D2), the integrated belief degree of D2 is:
$$ \begin{aligned} \beta_{2} & = w_{k} w_{l} \beta_{2}^{k} \beta_{2}^{l} + w_{k} w_{k} \beta_{2}^{k} + w_{l} w_{l} \beta_{2}^{l} \\ & = w_{k} w_{l} \frac{{y_{k} y_{l} }}{{u(D_{2} )u(D_{2} )}} + w_{k} w_{k} \frac{{y_{k} }}{{u(D_{2} )}} + w_{l} w_{l} \frac{{y_{l} }}{{u(D_{2} )}} \\ & = \frac{{w_{k} w_{l} y_{k} y_{l} }}{{\left( {u(D_{2} )} \right)^{2} }} + \frac{{(w_{k} )^{2} y_{k} + (w_{l} )^{2} y_{l} }}{{u(D_{2} )}}. \\ \end{aligned} $$(B3) -
2.
When u(D1)\( \le \)yk\( \le \)u(D2) and u(D2) < yl\( \le \)u(D3), the integrated belief degree of D2 is:
$$ \begin{aligned} \beta_{2} & = w_{k} w_{l} \beta_{2}^{k} \beta_{2}^{l} + w_{k} w_{k} \beta_{2}^{k} + w_{l} w_{l} \beta_{2}^{l} \\ & = w_{k} w_{l} \frac{{y_{k} (1 - y_{l} )}}{{u(D_{2} )\left( {1 - u(D_{2} )} \right)}} + w_{k} w_{k} \frac{{y_{k} }}{{u(D_{2} )}} + w_{l} w_{l} \frac{{1 - y_{l} }}{{1 - u(D_{2} )}} \\ & = \frac{{w_{k} w_{l} y_{k} (1 - y_{l} )}}{{u(D_{2} )\left( {1 - u(D_{2} )} \right)}} + \frac{{(w_{k} )^{2} y_{k} }}{{u(D_{2} )}} + \frac{{(w_{l} )^{2} (1 - y_{l} )}}{{1 - u(D_{2} )}}. \\ \end{aligned} $$(B4) -
3.
When u(D2) < yk\( \le \)u(D3) and u(D1)\( \le \)yl\( \le \)u(D2), the integrated belief degree of D2 is:
$$ \begin{aligned} \beta_{2} & = w_{k} w_{l} \beta_{2}^{k} \beta_{2}^{l} + w_{k} w_{k} \beta_{2}^{k} + w_{l} w_{l} \beta_{2}^{l} \\ & = w_{k} w_{l} \frac{{(1 - y_{k} )y_{l} }}{{\left( {1 - u(D_{2} )} \right)u(D_{2} )}} + w_{k} w_{k} \frac{{1 - y_{k} }}{{1 - u(D_{2} )}} + w_{l} w_{l} \frac{{y_{l} }}{{u(D_{2} )}} \\ & = \frac{{w_{k} w_{l} (1 - y_{k} )y_{l} }}{{\left( {1 - u(D_{2} )} \right)u(D_{2} )}} + \frac{{(w_{k} )^{2} (1 - y_{k} )}}{{1 - u(D_{2} )}} + \frac{{(w_{l} )^{2} y_{l} }}{{u(D_{2} )}}. \\ \end{aligned} $$(B5) -
4.
When u(D2) < yk\( \le \)u(D3) and u(D2) < yl\( \le \)u(D3), the integrated belief degree of D2 is:
$$ \begin{aligned} \beta_{2} & = w_{k} w_{l} \beta_{2}^{k} \beta_{2}^{l} + w_{k} w_{k} \beta_{2}^{k} + w_{l} w_{l} \beta_{2}^{l} \\ & = w_{k} w_{l} \frac{{(1 - y_{k} )(1 - y_{l} )}}{{\left( {1 - u(D_{2} )} \right)\left( {1 - u(D_{2} )} \right)}} + w_{k} w_{k} \frac{{1 - y_{k} }}{{1 - u(D_{2} )}} + w_{l} w_{l} \frac{{1 - y_{l} }}{{1 - u(D_{2} )}} \\ & = \frac{{w_{k} w_{l} (1 - y_{k} )(1 - y_{l} )}}{{\left( {1 - u(D_{2} )} \right)^{2} }} + \frac{{(w_{k} )^{2} (1 - y_{k} ) + (w_{l} )^{2} (1 - y_{l} )}}{{1 - u(D_{2} )}}. \\ \end{aligned} $$(B6)
Rights and permissions
About this article

Cite this article
Yang, LH., Liu, J., Wang, YM. et al. New activation weight calculation and parameter optimization for extended belief rule-based system based on sensitivity analysis. Knowl Inf Syst 60, 837–878 (2019). https://doi.org/10.1007/s10115-018-1211-0
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10115-018-1211-0