
Abstract
In this paper a model order reduction technique for the dynamic simulation of beams undergoing large rotations is presented. The finite element model for the motion of such beams is based on the corotational formulation. The trajectory piecewise linear model order reduction (TPWLMOR) method with second order Krylov subspace is used to obtain the reduced order model from the finite element model. Improvements are suggested to improve the accuracy and the computational efficiency of the TPWLMOR model. Several numerical examples which include forced undamped and damped beams are presented to validate the proposed method.


























Similar content being viewed by others
References
Antoulas A (2005) Approximation of large scale dynamical systems. SIAM, Philadelphia
Argyris J (1982) An excursion into large rotations. Comput Method Appl Mech 32(3):85–155
Bai Z (2002) Krylov subspace techniques for reduced-order modeling of large-scale dynamical systems. Appl Numer Math 43(1–2):9–44
Bai Z, Yangfeng SU (2005) Dimension reduction of large-scale second-order dynamical systems via a second-order arnoldi method. SIAM J Sci Comput 26(5):1692–1709
Barbic J, James D (2005) Real-time subspace integration for St. Venant-kirchhoff deformable models. ACM Tran Graph (SIGGRAPH 2005) 24(3):982–990
Bathe KJ (2007) Conserving energy and momentum in nonlinear dynamics: a simple implicit time integration scheme. Comput Struct 85(7–8):437–445
Bathe KJ (2009) Finite element procedures. Phi Learning, New Delhi
Bathe KJ, Baig MMI (2005) On a composite implicit time integration procedure for nonlinear dynamics. Comput Struct 83(31–32):2513–2524
Bathe KJ, Noh G (2012) Insight into an implicit time integration scheme for structural dynamics. Comput Struct 98–99:1–6
Behdinan K, Stylianou MC, Tabarrok B (1998) Co-rotational dynamic analysis of flexible beams. Comput Method Appl Mech 154(1):151–161
Chen J, Kang SM, Zou J, Liu C, Schutt-Ainé JE (2004) Reduced-order modeling of weakly nonlinear mems devices with taylor-series expansion and arnoldi approach. J Microelectromech Syst 13(3):441–451
Craig RR Jr (2002) Krylov–lanczos methods. Encycl Vib 2:691–698
Crisfield M (1990) A consistant co-rotational formulation for non-linear, three-dimensional, beam elements. Comput Method Appl Mech 81(3):131–150
Crisfield M (1991) Non-linear finite element analysis of solids and structures. Wiley, New York
Crisfield M, Galvanetto U, Jelenic G (1997) Dynamics of 3-D co-rotational beams. Comput Mech 20(3):507–519
Escalona J, Hussien H, Shabana A (1998) Application of the absolute nodal co-ordinate formulation to multibody system dynamics. J Sound Vib 214(5):833–851
Geradin M, Cordona A (1989) Kinematics and dynamics of rigid and flexible mechanisms using finite elements and quaternion algebra. Comput Mech 4(3):115–136
Hasiao K, Jang J (1991) Dynamic analysis of planar flexible mechanisms by co-rotational formulation. Comput Method Appl Mech 87(3):1–14
Hilber HM, Hughes TJR, Taylor RL (1977) Improved numerical dissipation for time integration algorithms in structural dynamics. Earthq Eng Struct Dyn 5(3):283–292
Idelsohn SR, Cardona A (1985a) A load-dependent basis for reduced nonlinear structural dynamics. Comput Struct 20(1–3):203–210
Idelsohn SR, Cardona A (1985b) A reduction method for nonlinear structural dynamic analysis. Comput Method Appl Mech 49(3):253–279
Iura M, Iwakuma T (1995) Dynamic analysis of planar timoshenko beam with finite displacement. Comput Struct 45(1):173–179
Kosambi D (1943) Statistics in function space. J Indian Math Soc 7:76–78
Krysl P, Lall S, Marsden J (2001) Dimensional model reduction in non-linear finite element dynamics of solids and structures. Int J Numer Methods Eng 51(4):479–504
Le T, Battini J, Hijaj M (2011) Efficient formulation for dynamics of corotational 2D beams. Comput Mech 48(3):153–161
Nickell RE (1976) Nonlinear dynamics by mode superposition. Comput Method Appl Mech 7(1):107–129
Nour-Omid B, Rankin C (1991) Finite rotation analysis and consistent linearization using projectors. Comput Method Appl Mech 93(3):353–384
Phillips JR (2003) Projection-based approaches for model reduction of weakly nonlinear time-varying systems. IEEE Trans Comput Aid Des 22(2):171–187
Rankin C, Brogan F (1986) An element independent corotational procedure for the treatment of large rotations. J Pressure Vessel Technol ASME 108(3):165–174
Rewienski M, White J (2003) A trajectory piecewise-linear approach to model order reduction and fast simulation of nonlinear circuits and micromachined devices. IEEE Trans Comput Aid Des 22(2):155–170
Shabana A (1997) Flexible multibody dynamics: review of past and recent developments. Multibody Syst Dyn 1:189–222
Shabana A (2005) Dynamics of multibody systems, 3rd edn. Cambridge University Press, Cambridge
Simo J, Vu-Quoc L (1986a) On dynamic analysis of flexible beams under large overall motion- the plane case: part I. J Appl Mech 53(3):849–863
Simo J, Vu-Quoc L (1987) The role of non-linear theories in transient dynamic analysis of flexible structures. J Sound Vib 119(3):487–508
Simo JC, Vu-Quoc L (1986b) On the dynamics of flexible beams under large overall motions—the plane case: part II. J Appl Mech 53(4):855–863
White YCJ (1999) Model order reduction of nonlinear system. PhD thesis, MIT, Cambridge
Author information
Authors and Affiliations
Corresponding author
Appendix: Calculation of internal force vector and the inertia term
Appendix: Calculation of internal force vector and the inertia term
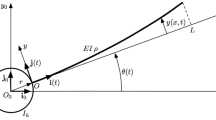
The equations of motion of a beam undergoing large rotations are derived using the corotational approach. The corotating beam element (see Fig. 1) in local coordinate is based on the Euler Bernoulli beam theory. Linear interpolation is used for axial displacement (u) while a cubic interpolation is used for transverse displacement (w). Thus the axial displacement, the transverse displacement and the rotation can be approximated as
where \(\bar{u}\) is the local axial displacement and \({\bar{\theta _{1}}}\) and \({\bar{\theta _{2}}}\) are the local rotations at nodes 1 and 2. The derivation of the internal force term and the inertia term in the equation of motion is given next.
1.1 Calculation of the internal force vector
The internal force vector is derived following Crisfield’s approach [14] which is based on the principle of virtual work. Using the above approximations for the local beam, the local axial force (N), and end moments \(M_1\) and \(M_2\) can be derived as follows [14],
Note that the local internal force vector \(\bar{\mathbf{f }}_I^{e}\) is given by,
The local tangent stiffness, \(\mathbf{K}_{l}\), can be obtained by relating the local internal forces vector, \({\bar{\mathbf{f}}}^{e}_{l}\), with local displacement vector, \(\bar{\mathbf{q}}^{e}\), and is given by,
The global internal force vector (\(\mathbf f _I^{e}\)) can be related to the local internal force vector by
where, \(\mathbf B \) is a transformation matrix given by,
Here \(c=\cos (\beta )\), \(s=\sin (\beta )\) and \(L_n\) is the new length. and \(\mathbf z =[s\,\,\, -c\,\,\,\,\, 0\,\,\, -s\,\,\,\,\, c\,\,\,\,\, 0]^T\)
1.2 Calculation of inertia force vector
The inertia force vector is obtained using Le’s approach [25] and is based on using the expression of the kinetic energy of the beam element. In terms of the kinetic energy, the inertia force vector is given by [25],
where, \(K^e\) is the kinetic energy of the beam element. The expression for the kinetic energy in terms of a global nodal velocity vector \(\dot{\mathbf{q ^e}}\) can be written in the form of,
where, \(\dot{\mathbf{q ^e}}=[\dot{u}_1 \,\,\, \dot{w}_1 \,\,\, \dot{\theta }_1\,\,\, \dot{u}_2 \,\,\, \dot{w}_2 \,\,\, \dot{\theta }_2]^T\) is a global nodal velocity vector and \(\mathbf M ^e\) is an elemental mass matrix in reference configuration. The elemental mass matrix in reference configuration is related to elemental mass matrix in local configuration \(\mathbf M _l^e\) as,
where, \(\mathbf T ^e\) is a transformation matrix and given by,
Now the local mass matrix \(\mathbf M _l^e\) is derived by making two assumptions. (i) local transverse displacement w is very small (ii) The new length of the beam element is approximately equal to the original length of the beam element. The local mass matrix \(\mathbf M _l^e\) is then be written as,
where, \(\mathbf{M _l^e}^1\) is the local mass matrix for axial and transverse displacement and \(\mathbf{M _l^e}^2\) is the local mass matrix for rotation. \(\mathbf{M _l^e}^1\) and \(\mathbf{M _l^e}^2\) are given by,
The expressions for the two terms of Eq. (43) are given next.
1.2.1 Calculation of the first term of Eq. (43)
The first term of Eq. (43) can be written as
Note that \(\mathbf M ^e\) is a function of \(\beta \), \({\bar{\theta _{1}}}\) and \({\bar{\theta _{2}}}\) which are time dependent. The expression for \(\dot{\mathbf{M }}^e\) is given by
where
Equation (51) can be rewritten as,
Therefore, Eq. (50) can be written as,
The expression for \(\mathbf M _{\beta }^e\) can be obtained by differentiating Eq. (45) with respect to \(\beta \)
where,
Therefore Eq. (54) can be written as,
Similarly, expressions for \(\mathbf M _{{\bar{\theta _{1}}}}^e\) and \(\mathbf M _{{\bar{\theta _{2}}}}^e\) are given by,
where,
1.2.2 Calculation of second term of Eq. (43)
The second term of Eq. (43) is given by
Equation (61) can be rewritten as,
Now the inertia force term can be obtained by substituting Eqs. (53) and (62) in Eq. (43),
Rights and permissions
About this article

Cite this article
Gaonkar, A.K., Kulkarni, S.S. Model order reduction for dynamic simulation of slender beams undergoing large rotations. Comput Mech 59, 809–829 (2017). https://doi.org/10.1007/s00466-017-1374-7
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00466-017-1374-7