
Abstract
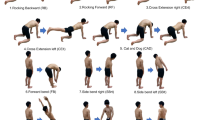
The aim of the present investigation was to study the adaptation of the kinematic synergy responsible for equilibrium control during upper trunk movements to a 10-kg load added to the subject’s shoulders. Five adult subjects were asked to bend their upper trunk forward to an angle of 35° and then to hold the final position for 3 s, first without any load and then with a 10-kg load fixed to their shoulders. The final anteroposterior CM positions 400 ms after the movement offset, the time course of the anteroposterior center of mass (CM) shift during the movement, the EMG pattern of the main muscles involved in the movement and the initial CP shift were studied under both unloaded and loaded conditions. The kinematic synergy was quantified by performing a principal components analysis on the hip, knee and ankle angle changes occurring during the movement. The results indicate that: (1) the final anteroposterior position of the CM changed little if at all in the presence of the additional load, and that the anteroposterior CM shift was minimized throughout the duration of the movement; (2) the kinematic synergy was still characterized, in the presence of the additional load, by a strong coupling between the angle changes, as indicated by the fact that the first principal component (PC1) accounted for more than 99% of the hip, knee and ankle joint movements. A change was observed, however, in the ratio between the angles: the ankle extension increased, thus compensating for the additional theoretical forward CM shift that the additional load could be expected to cause; (3) the lack of change in the initial backward CP shift observed under loaded condition as well as the lack of change of the initial agonist EMG bursts suggest that the initial feedforward control of the kinematic synergy was not affected in the presence of the additional load. An increase in the antagonist bursts, presumably reflecting an adaptation of the kinematic synergy, was observed during the late phase of the movement; and (4) it is concluded that the adaptation of the kinematic synergy to the load was due to a specific change in the feedback control during the braking phase of the movement which presumably increases the ankle joint extension and consequently causes an increased backward shift of the hip which compensates for the forward shift due to the load.
Similar content being viewed by others

Author information
Authors and Affiliations
Additional information
Received: 19 March 1998 / Accepted: 31 March 1999
Rights and permissions
About this article
Cite this article
Vernazza-Martin, S., Martin, N. & Massion, J. Kinematic synergies and equilibrium control during trunk movement under loaded and unloaded conditions. Exp Brain Res 128, 517–526 (1999). https://doi.org/10.1007/s002210050874
Issue Date:
DOI: https://doi.org/10.1007/s002210050874