
Abstract
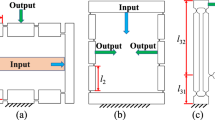
In the precision engineering field, a large number of applications require precise and microlevel manipulations, and microgrippers are an essential device to achieve precise manipulations. Highly precise movements are, in general, hard to achieve using conventional joints due to manufacturing error and backlash. In this paper, a new two-dimensional, compliant, monolithic piezo-actuated microgripper using flexure hinges is reported. The microgripper is designed, and a comparison study on stress and displacement is done by varying the hinge parameters such as the hinge radius, web thickness, position of flexure hinge, and radius of curvature of hinges. Kinematics of the microgripper is analyzed based on input/output displacement for all the above hinge design variations using FEM, and a kinematic model is arrived at based on the hinge location.
Similar content being viewed by others


References
Monkman GJ, Hesse S, Steinmann R, Schunk H (2007) Robot Grippers. Wiley, Weinheim
Rabenorosoa K, Haddab Y, Lutz P (2008) In: Ratchev S, Koelemeijer S (Eds.) IFIP International Federation for Information Processing, 260, Micro-Assembly Technologies and Applications. Springer, Boston, pp 235–242
Lobontiu N (2003) Compliant mechanisms design of flexure hinges. CRC, Boca Raton
Park SR, Yang SH (2005) A mathematical approach for analyzing ultra precision positioning system with compliant mechanism. J Mater Process Technol 164–165:1584–1589
Lee SH, Lee KC, Lee SS, Oh HS (2003) Fabrication of an electrothermally actuated electrostatic microgripper. In: The 12th International Conference on Solid-State Sensors, Actuators and Microsystems, vol. 1, Boston, June, pp 552–555
Chan HY, Li WJ (2003) A thermally actuated polymer micro robotic gripper for manipulation of biological cells. In: Proceedings of the IEEE International Conference on Robotics and Automation, vol. 1, Taipei, September, 2003, pp 288–293
Pan CS, Hsu WY (1996) An electro-thermally and laterally driven polysilicon microactuator. J Micromech Microeng 7:7–13
Chu PB, Pister KSJ (1994) Analysis of closed-loop control of parallel-plate electrostatic microgrippers. In: Proceedings of IEEE International Conference on Robotics and Automation, vol. 1, San Diego, USA, May, pp 820–825
Volland BE, Heerlein H, Rangelow IW (2002) Electrostatically driven microgripper. Microelectr Eng 61–62:1015–1023
Kim CJ, Pisano AP, Muller RS (1991) Overhung electrostatic microgripper, Digest of Technical Papers, TRANSDUCERS’91. In: International Conference on Solid-State Sensors and Actuators, San Francisco, USA, June, pp. 610–613
Kim CJ, Pisano AP, Muller RS (1992) Silicon-processed overhanging microgripper. J Microelectromech Syst 1(1):31–36
Kim CJ, Pisano AP, Muller RS, Lim MG (1990) Polysilicon microgripper. In: 4th Technical Digest of Solid-State Sensor and ActuatorWorkshop, IEEE, Hilton Head Island, USA, June, pp 48–51
Boggild P, Hansen TM, Molhave K, Hyldgrad A, Jensen MO, Richter J, Montelius L, Grey F (2001) Customizable nanotweezers for manipulation of freestanding nanostructures. In: Proceedings of the 2001 IEEE Conference on Nanotechnology, Maui, USA, October, pp. 87–92
Haddab Y, Challet N, Bourjault A (2000) A microgripper using smart piezoelectric actuators. In: Proceedings of the 2000 IEEE/RSJ International Conference on Intelligent Robots and Systems, vol. 1, Takamatsu, Japan, November, pp. 659–664
Carrozza MC, Menciassi A, Tiezzi G, Dario P (1997) The development of a LIGA-microfabricated gripper for micromanipulation tasks. J Micromech Microeng 8:141–143
Nah SK, Zhong ZW (2007) A microgripper using piezoelectric actuation for micro-object manipulation. Sens Actuators A 133:218–224
Goldfarb M, Celanovic N (1998) A flexure-based gripper for small-scale manipulation. Robotica 17:181–187
Mohd Zubir MN, Shirinzadeh B (2009) Development of a high precision flexure-based microgripper. Precis Eng 33:362–370
Ren H, Gerhard E (1997) Design and fabrication of a current-pulse-excited bistable magnetic microactuator. Sens Actuators A Phys 58(3):259–264
Zhong ZW, Yeong CK (2006) Development of a gripper using SMA wire. Sens Actuators A Phys 126(2):375–381
Lee AP, Ciarlo DR, Krulevitch PA, Lehew S, Trevino J, Northrup MA (1995) A practical microgripper by fine alignment, eutectic bonding and SMA actuation. In: The 8th International Conference on Solid-State Sensors and Actuators, and Eurosensors IX, Stockholm, Sweden, pp 368–371
Kohl M, Just E, Pfleging W, Miyazaki S (2000) SMA microgripper with integrated antagonism. Sens Actuators A Phys 83(1–3):208–213
Her I, Chang JC (1994) A linear scheme for the displacement analysis of micropositioning stages with flexure hinges. ASME J Mech Des 116:770–776
Paros LM, Weisbord L (1965) How to design flexure hinges. Mach Des 37:151–156
Smith S, Chetwynd D, Bowen D (1987) Design and assessment of monolithic high precision translation mechanisms. J Phys E 20:977–983
Lobontiu N, Paine J, Garcia E, Goldfarb M (2002) Design of symmetric conic section flexure hinges based on closed-form compliance equations. Mech Mach Theory 37:477–498
Yong YK, Tien-Fu Lu, Handley DC (2008) Review of circular flexure hinge design equations and derivation of empirical formulations. Prec Eng 32(2008):63–70
Chena G, Howell LL (2008) Two general solutions of torsional compliance for variable rectangular cross-section hinges in compliant mechanisms. Prec Engg 33(3):268–274
Smith ST (2000) Flexures: elements of elastic mechanisms. Gordon and Breach, New York
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Raghavendra, M.R.A., Kumar, A.S. & Jagdish, B.N. Design and analysis of flexure-hinge parameter in microgripper. Int J Adv Manuf Technol 49, 1185–1193 (2010). https://doi.org/10.1007/s00170-009-2478-9
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00170-009-2478-9