
Abstract
The design of efficient and high power density electrical machines needs an accurate characterization of magnetic phenomena. Core losses estimation is usually addressed by empirical models, where its lack of accuracy is well known. Hysteresis models are able to take an insight into the magnetic physical mechanisms. Compared to the empirical models, they contribute to a higher accuracy in modeling electromagnetic systems, including core losses estimation. At a macroscopic level, two models are often used: the Preisach and the Jiles–Atherton (J–A) models. This paper presents their basic formulation, as well the main limitations and scope of application. This is a first step to investigate the possible application of hysteresis models, in order to reach accurate core losses estimation in switched reluctance machines.
You have full access to this open access chapter, Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
Core losses estimation in ferromagnetic materials has been motivating an increasing research interest, since the first Steinmetz empirical formulation [1]. For electric machines, an accurate characterization and estimation of core losses is a fundamental issue, in order to improve the machine design, efficiency and control. Empirical models, based on losses separation, are unable to characterize the complex mechanisms that rule core losses phenomena [2]. Their parameter identification is based on curve-fitting methods, using manufacturer iron sheet data, experimental data or finite element analysis (FEA) [3]. FEA is the main tool for field distribution analysis in electric machines, where hysteresis is considered only after a stable solution is reached (i.e., post-processing calculation) [4]. Empirical models are still engineer’s first choice, due to their simplicity and fast processing. However, for non-sinusoidal flux density machines, like permanent magnet synchronous machine (PMSM) and switched reluctance machine (SRM), conventional models reveal a significant lack of accuracy for core losses estimation. Therefore, different approaches must be addressed.
Hysteresis models provide a deeper insight into the magnetic mechanism, allowing a better characterization of the magnetic system behavior, including core losses. Moreover, it is possible to integrate them with FEA. In literature, two different approaches for modeling hysteresis can be found [5]: physical models and mathematical (phenomenological) models. The first ones are based on magnetization physics, at micromagnetic scale. In the second ones, hysteresis is described with a mathematical relation between the macro scale magnetization (M) and the magnetic field strenght (H). Phenomenological models have smaller computation times, while the physical ones give a much better insight into the magnetic physics. The Preisach and Jiles–Atherton (J–A) models are considered two classic macroscopic approaches for hysteresis modeling. The former is a phenomenological model, with higher accuracy than the later. The Preisach model can represent major and minor loops for different materials, due to its phenomenological nature. The J-A model includes some physical features, but it cannot represent minor loops. On the other hand, it has a smaller parameter number, which contributes to more efficient computational and memory requirements [6]. Both models need a large amount of measurement data [7] and show limitations in characterizing the magnetization phenomena. Therefore, several extensions to the original models were proposed. Also, since they have some complementary features, there have been attempts to integrate both models. However, this is beyond the paper scope.
This paper intends to make a description of the Preisach and J-A hysteresis models. The fundamental goal is to give a first contribution to the main research objective of the PhD thesis: to develop a methodology for characterizing core losses in SRM. The paper is structured as follows: Sect. 2 presents the PhD work relationship to smart systems. In Sect. 3, the original Preisach model is presented, where its main features are highlighted. Section 4 has a similar structure for the J-A model. Section 5 includes the conclusions and the next steps in this work.
2 Relationship to Smart Systems
Most often, smart systems must face several demanding requirements. In order to do it, they must integrate different technologies, where sensing, actuation and control levels are fundamental. Their performance relies on a multitude of energy conversion devices, like sensors and actuators. Many devices include ferromagnetic materials. Therefore, an accurate characterization of these materials, including their losses, is fundamental, under different views (e.g., higher efficiency actuators, sensors with smaller error and accurate models, for a better control performance). Moreover, this may be extended to the design level, where machines, sensors and controllers can be simulated in a more realistic way, optimizing their performance before the prototype stage. A good example of a smart system is an autonomous electric vehicle. Its propulsion is based on electric motors, so very accurate models must be employed, in order to achieve the instantaneous drive performance requirements. Also, the vehicle efficiency is a fundamental issue. The energy management system has a key role, where loss characterization for different operation levels is fundamental.
3 Preisach Model
In the Preisach model, the physical mechanisms of hysteresis are not considered, only a general mathematical description of its behavior (i.e., a phenomenological representation). Therefore, it can be used independently of the hysteresis physical nature under analysis. It is a quasi-static (rate-independent) scalar model, where \( {\text{H}}({\text{t}}) \) is unidirectional. It assumes that the material has a large set of small dipoles, where each one has a rectangular hysteresis loop (hysterons). Mathematically, it may be expressed byFootnote 1 [8]:
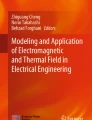
Where \( \alpha ,\beta \) are, respectively, the transition “up” and “down” inputs of the generic hysteron \( (f_{\alpha ,\beta } ) \) – Fig. 1-(a). Its magnetization can be \( - {\text{m}}_{\text{s}} \) or \( + {\text{m}}_{\text{s}} \), depending on the magnetic field strength \( ( {\text{H}}({\text{t}})) \) and its history, where \( {\text{m}}_{\text{s}} \) is the elementary magnetization, equal for all hysterons.

(a) Preisach typical hysteron and (b) Model schematic representation
The hysteresis loop results from the superposition of these elementary rectangular loops, affected by the Preisach function, \( p\left( {\alpha ,\beta } \right) \), which is a histeron weight function – Fig. 1(b). Hysterons include both symmetric and asymmetric loops, allowing to model minor loops (by its nature, they are asymmetric ones) [8]. Each hysteron must verify a set of rules, reflecting the phenomenological nature of the model:
-
If \( \text{H}_\text{h} > \text{H}_\text{sat} = > {\text{f}}_{\upalpha,\upbeta} = {+}\text{m} _{\text{s}} \); consequence: \( \alpha \le {\text{H}_\text{sat}} \)
-
If \( {\text{H}_\text{h}} < - {\text{H}_\text{sat}} = > {\text{f}}_{\upalpha,\upbeta} = -\text{m} _{\text{s}} \); consequence: \( \beta \ge - {\text{H}_\text{sat}} \)
-
\( \alpha \ge \beta \)
Where “\( = \)” is related to reversible thermodynamics phenomena (i.e., stored energy, able to be recovered) and “\( > \)” reflects the irreversible phenomena (i.e., energy dissipative effects). This rule is reflected in the integral limits of (1). Moreover, since these limits include the entire Preisach plan \( (\alpha ,\beta ) \), for \( \alpha < \beta \), \( p(\alpha ,\beta ) \) must be 0. At the macro-magnetic scale, if \( {\text{H}} > {\text{H}}_{\text{sat}} \), then \( {\text{M}} = {\text{M}}_{\text{sat}} \); also, for \( {\text{H}} < { - {\rm H}}_{\text{sat}} \), one has \( {\text{M}} = - {\text{M}}_{\text{sat}} \). \( {\text{M}}_{\text{sat}} \) is the material saturated magnetization and \( {\text{H}}_{\text{sat}} \) is the corresponding magnetic field strength. The mathematical basis of Preisach model can be highlighted under a geometrical analysis. For: \( \text{ - }{\text{H}}_{\text{sat}} \le {\text{H}} \le {\rm H}_{\text{sat}} \), the area inside the rectangular triangle, in Fig. 2-(a), defines the hysteron domain, necessary to model the hysteresis loops.

(a) \( {\text{H}}({\text{t}}) \) reversal extremes and (b) \( {\text{H}}({\text{t}}) \) extremes representation in the Preisach plan
The staircase line depicted in Fig. 2-(a) represents the path in the Preisach plan, performed by the input \( {\text{H}}({\text{t}}) \), in Fig. 2-(b). Initially, it has a very large negative value. Equation (1) can then be replaced by:
\( {\text{M}}({\text{t}}) \) depends on the positive \( ({\text{S}} + ) \) and negative \( ({\text{S}} - ) \) areas, which divide the triangle in Fig. 2-(b) – \( {\text{f}}_{{\upalpha,\upbeta}} = + {\text{m}}_{\text{s}} \), for \( (\alpha ,\beta ) \in {\text{S}} + \) and \( {\text{f}}_{{\upalpha,\upbeta}} = - {\text{m}}_{\text{s}} \), for \( (\alpha ,\beta ) \in {\text{S}} - \). \( {\text{S}} + \) and \( {\text{S}} - \) are defined by the staircase line. It should be noted that the past extreme values of \( {\text{H}}({\text{t}}) \) dictate the line´s shape: in fact, they are the coordinates of its vertices. Therefore, the staircase line models the hysteresis memory effect. Its construction is based on two simple rules:
-
For monotonically increasing input, a horizontal segment of the staircase line moves upwards, until an extreme value of \( {\text{H}}({\text{t}}) \) is reached.
-
For monotonically decreasing input, a vertical segment line moves from right to left, until an extreme of \( {\text{H}}({\text{t}}) \) is reached.
The mathematical structure of the Preisach model has two fundamental properties [8]:
-
Wiping-Out Property: it is related to the memory process. The sequence of reversal points in \( {\text{H}}({\text{t}}) \) (i.e., local maximum and minimum values) can be redundant: there is a subset with the fundamental reversal values, able to define the state of the system. The following conditions characterize this subset: \( {\text{H}}_{{{ \hbox{max} }\_1}} > {\text{H}}_{{{ \hbox{max} }\_2}} > \ldots > {\text{H}}_{{{ \hbox{max} }\_{\text{n}}}} ;{\text{H}}_{{{ \hbox{min} }\_1}} < {\text{H}}_{{{ \hbox{min} }\_2}} < \ldots < {\text{H}}_{{{ \hbox{min} }\_{\text{n}}}} \)
\( {{{\text{Where: t(H}}_{{{ \hbox{min} }\_1}} ) < {\text{t(H}}_{{{ \hbox{max} }\_1}} ) < {\text{t(H}}_{{{ \hbox{min} }\_2}} ) < {\text{t(H}}_{{{ \hbox{max} }\_2}} ) < \ldots < {\text{t(H}}_{{{ \hbox{min} }\_{\text{n}}}} ) < {\text{t(H}}_{{{ \hbox{max} }\_{\text{n}}}} )}} \)
In short, only the alternating dominant extremes of \( {\text{H}}({\text{t}}) \) are stored, all the other ones are wiped out.
-
Congruency Property: it is addressed to minor loop creation, due to periodic field variations. Consider two different fields, \( {\text{H}}_{\text{a}} ( {\text{t)}} \) and \( {\text{H}}_{\text{b}} ( {\text{t)}} \), cycling between two values, \( {\text{H}}_{1} \) and \( {\text{H}}_{2} \), for \( {\text{t}} > {\text{t}}_{\text{c}} \). The lines described in the \( (\alpha ,\beta ) \) plan, for both \( {\text{H}}_{\text{a}} ( {\text{t)}} \) and \( {\text{H}}_{\text{b}} ( {\text{t)}} \) are similar, so two similar-shape (congruent) minor loops are created. However, this does not mean that they are coincident in the \( ({\text{M}},{\text{H}}) \) plan: it depends on the past evolution of both fields (i.e., \( {\text{H}}_{\text{a}} ( {\text{t)}} \) and \( {\text{H}}_{\text{b}} ( {\text{t)}} \) for \( {\text{t}} < {\text{t}}_{\text{c}} \)). If their histories are not the same, the two minor loops are not coincident – they will be shifted through the M axis.
As proven in [8], wiping-out and congruency properties are necessary and sufficient conditions for modeling a physical process with the Preisach formulation. However, many magnetic materials do not hold these properties [9]. The correlation between the parameters and the magnetization process is not always clear [10]. Also, a complex parameter identification is usually demanded, with a heavy computation burden.
4 Jiles-Atherton (J-A) Model
The J-A model is a scalar pseudo-physics based model, where some nonlinear phenomena are considered (e.g., magnetic moment interaction, Barkhausen jumps due to domain wall motion, domain wall bending and domain rotation). The original J-A model takes the anhysteretic magnetization curve (only domain rotation is considered, without including losses due to domain wall motion), in addition to reversible and irreversible magnetization phenomena [11] (i.e., at any instant, the source energy is considered to be divided into stored magnetostatic energy and energy dissipated due to domain wall movement (hysteresis loss)). The analytical anhysteretic magnetization \( (M_{an} ) \) was first obtained, based on Langevin theory. It was developed for paramagnetic materials and extended to ferro and ferrimagnetic materials [12]. The original Langevin function is given by:
Where \( {\textit{H}}_{\textit{a}} \) is the applied field strength and \( a = \frac{{k_{B} T}}{\mu 0m} \) (\( k_{B} \) is the Boltzmann constant, \( T \) is the material absolute temperature, \( \mu_{0} \) is the free space permeability and \( m \) is the magnitude of each elementary permanent magnetic dipole in the material).
Langevin approach assumes that the material individual magnetic moments do not interact with each other, being sensible only to the applied field and thermal agitation. However, for ferromagnetic materials, \( H_{a} \) in (3) is no longer suitable. In fact, there is a strong interaction between the elementary moments, particularly below the Curie temperature [12]. In 1907, Weiss introduced the concept of “molecular field” \( ({\text{H}}_{\text{m}} ) \), in order to express this moment interaction. He postulated that \( {\text{H}}_{\text{m}} \) (an internal fictitious field) is directly proportional to \( {\text{M}} \), which, in turn, adds to \( {\text{H}}_{\text{a}} \). The resultant field \( ({\text{H}}_{\text{r}} ) \) is given by:
It follows that \( {\textit{H}}_{\textit{a}} \) is replaced by \( H_{r} = H_{a} + \gamma M_{an} (H_{a} ) \), in (3). This equation describes the saturation phenomenon, but not the hysteresis one: irreversible magnetic phenomena are not included (e.g., Barkhausen jumps), only reversible ones (e.g., magnetic domain rotation).
The hysteresis equation is deduced from an energy equilibrium condition [11], between the magnetic energy supplied by an external source \( ({\text{M}}_{\text{s}} ) \), the change in the stored magnetostatic energy (A) and the hysteresis loss (B), related to the irreversible magnetization \( {\text{M}}_{\text{irr}} \). For an initially demagnetized material \( ({\text{M}}_{\text{s}} = {\text{M}}_{\text{an}} ) \), this energy relation is given by:
Where \( k \) is the pinning parameterFootnote 2, related to the energy dissipated due to hysteresis. The parameter \( \delta \) makes sure that (B) is always a dissipative energy (i.e., \( \delta \frac{{dM_{irr} }}{{dH_{r} }} > o \)). The coefficient c is a measure of the reversible change in magnetization (\( 0 < c < 1 \); if \( c = 0 \), then magnetization change is irreversible; if \( c = 1 \), then magnetization change is reversible). From (5), for static or quasi-static equilibrium conditions, energy losses occur only due to changes in \( {\text{M}}_{\text{irr}} \). Considering the irreversible and reversible \( (M_{rev} ) \) components of magnetization \( ({\text{M}}) \), one has:
After differentiating (5) and considering (6), it follows that:
If only irreversible phenomena exist, \( c = 0 \) and \( M_{rev} = 0 \). Under this scenario, one has (from (7)):
Substituting (8) in (7), \( M_{rev} \) is given by:
Thus, in the absence of irreversible phenomena, the magnetization curve \( {\text{M}}({\text{H}}_{\text{a}} ) \) is coincident with the anhysteretic curve \( (M_{an} (H_{a} )) \). Considering (6), (8), (9) and (4), the rate of change of magnetization with the applied field is given by:
Where (10) is ruled by the displacement of the magnetization from the anhysteretic curve. This equation models the magnetic hysteresis behavior for the J-A model. Together with (3), the model has five physical parameters: \( a,\,\gamma ,\,c,\,k \) and \( M_{sat} \).
A critical analysis to J-A model physical basis is presented in [13]: it points out that (5) is a balance of co-energies, which does not reflect the first thermodynamics law in every instant (in fact, only for a complete hysteretic cycle). Moreover, other non-physical considerations were also employed (e.g., the need for the “\( \updelta \)” parameter). Some authors do not consider the J-A model as a physical one [14]. In this paper it is designated as a “pseudo-physics” model.
5 Conclusions
Traditional methods for core losses prediction in soft magnetic materials and electrical machines are based on curve-fitting empirical models. New machine designs and non-sinusoidal excitation demand for improved accurate approaches.
Hysteresis models allow a deeper insight in characterizing the magnetization phenomena. They can be divided into physical and phenomenological models. Two classic macroscopic approaches are the Preisach and J–A models. Compared with curve-fitting methods, they give more accurate results, since they are able to represent the material’s behavior (under certain limitations). Also, they can be integrated with FEA. Although Preisach model is a phenomenological one, it gives more accurate results than the J-A model. Moreover, it can be applied to other materials than soft-magnetic, because the Preisach function does not consider their physical properties. The static J-A model has a higher physical basis and is more efficient in terms of computational time and memory requirements. Parameter identification is simpler, but it cannot represent minor loops. With the Preisach model this is possible.
Both the original models have several limitations, mainly due to the non-inclusion of several magnetization physical phenomena. Several extended models have been proposed, attempting to overcome those limitations. They show complementary advantages, since modeling magnetization phenomena is a very complex task. In short, this issue remains as a challenging open research field.
This PhD intends to characterize accurately the core losses in SRM. As a future stage, it is intended to address energy–based models, where it is expected to reach a deeper insight in soft magnetic materials energy balance. Parameter estimation effort, computation burden and integration with FEA must also be addressed.
Notes
- 1.
(1) is defined for magnetic process. Since this is a phenomenological model, in the general formulation, \( {\text{M}}({\text{t}}) \) and \( {\text{H}}({\text{t}}) \) are replaced by, respectively, the generic functions \( {\text{y}}({\text{t}}) \) and \( {\text{u}}({\text{t}}) \).
- 2.
Due to pinning domain wall effect, as a consequence of material imperfections.
References
Steinmetz, C.P.: On the law of hysteresis. Trans. Am. Inst. Electr. Eng. 9(1), 1–64 (1892)
Du, R., Robertson, P.: Dynamic Jiles-Atherton model for determining the magnetic power loss at high frequency in permanent magnet machines. IEEE Trans. Magn. 51(6), 1–10 (2015)
Rasilo, P., Belahcen, A., Arkkio, A.: Experimental determination and numerical evaluation of core losses in a 150-kVA wound-field synchronous machine. IET Electr. Power Appl. 7(2), 97–105 (2013)
Demenko, I.D., Hameyer, K., Pietrowski, W., Krzysztof Zawirski, A., Mazgaj, W., Warzecha, A.: Influence of simplifications of the rotational magnetization model on calculation accuracy. COMPEL: Int. J. Comput. Math. Electr. Electr. Eng. 34(3), 740–753 (2015)
Alatawneh, N., Pillay, P.: Modeling of the interleaved hysteresis loop in the measurements of rotational core losses. J. Magn. Magn. Mater. 397, 157–163 (2016)
Hussain, S., Lowther, D.A.: Establishing a relation between Preisach and Jiles-Atherton models. IEEE Trans. Magn. 51(3), 1–4 (2015)
Motoasca, S., Scutaru, G., Gerigan, C.: Improved analytical method for hysteresis modelling of soft magnetic materials In: 2015 International Aegean Conference on Electrical Machines & Power Electronics (ACEMP), 2015 International Conference on Optimization of Electrical & Electronic Equipment (OPTIM) & 2015 International Symposium on Advanced Electromechanical Motion Systems (ELECTROMOTION), pp. 558–563. IEEE (2015)
Mayergoyz, I.D.: Mathematical Models of Hysteresis and their Applications. Academic Press, Cambridge (2003)
Torre, E.D.: Magnetic Hysteresis. Wiley, Hoboken (2000)
Bertotti, G.: Hysteresis in Magnetism: for Physicists, Materials Scientists, and Engineers. Academic press, Cambridge (1998)
Jiles, D., Atherton, D.: Theory of ferromagnetic hysteresis. J. Magn. Magn. Mater. 61(1–2), 48–60 (1986)
Cullity, B.D., Graham, C.D.: Introduction to Magnetic Materials. Wiley, Hoboken (2011)
Zirka, S.E., Moroz, Y.I., Harrison, R.G., Chwastek, K.: On physical aspects of the Jiles-Atherton hysteresis models. J. Appl. Phys. 112(4), 043916 (2012)
Cardelli, E.: Advances in magnetic hysteresis modeling. Handb. Magn. Mater. 24, 323–409 (2015)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2017 IFIP International Federation for Information Processing
About this paper
Cite this paper
Melo, P., Araújo, R.E. (2017). An Overview on Preisach and Jiles-Atherton Hysteresis Models for Soft Magnetic Materials. In: Camarinha-Matos, L., Parreira-Rocha, M., Ramezani, J. (eds) Technological Innovation for Smart Systems. DoCEIS 2017. IFIP Advances in Information and Communication Technology, vol 499. Springer, Cham. https://doi.org/10.1007/978-3-319-56077-9_39
Download citation
DOI: https://doi.org/10.1007/978-3-319-56077-9_39
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-56076-2
Online ISBN: 978-3-319-56077-9
eBook Packages: Computer ScienceComputer Science (R0)