
Abstract
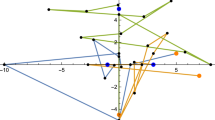
A root neighborhood (or pseudozero set) of a degree-n polynomial p(z) is the set of all complex numbers that are the roots of polynomials whose coefficients differ from those of p(z), under a specified norm in \({\mathbb{C}^{n+1}}\) , by no more than a fixed amount \({\epsilon}\) . Root neighborhoods corresponding to commonly used norms are bounded by higher-order algebraic curves called generalized lemniscates. Although it may be neither convenient nor useful to derive their implicit equations, such curves are amenable to graphical analysis by means of simple contouring algorithms. Root neighborhood methods offer advantages over alternative approaches (the Kharitonov theorems and their generalizations) for investigating the robust stability of dynamic systems with uncertain parameters, since they offer valuable insight concerning which roots of the characteristic polynomial will become unstable first, and the relative importance of parameter variations on the root locations—and hence speed and damping of the system response. We derive a generalization of root neighborhoods to the case of polynomial coefficients having an affine linear dependence on a set of complex uncertainty parameters, bounded under a general weighted norm, and we discuss their applications to robust stability problems. The methods are illustrated by several computed examples.
Similar content being viewed by others

References
Ackermann J. (1993). Robust Control: Systems with Uncertain Physical Parameters. Springer, London
Barmish B.R. (1994). New Tools for Robustness of Linear Systems. Macmillan, New York
Barmish B.R. and Tempo R. (1991). On the spectral set for a family of polynomials. IEEE Trans. Automat. Contr.\
Bose N.K. and Shi Y.Q. (1987). A simple general proof of Kharitonov’s generalized stability criterion. IEEE Trans. Circ. Syst. 34: 1233–1237
Cerone V. (1997). A fast technique for the generation of the spectral set of a polytope of polynomials. Automatica 33: 277–280
Chapellat H., Bhattacharyya S.P. and Dahleh M. (1990). Robust stability of a family of disc polynomials. Int. J. Contr. 51: 1353–1362
Chesi and G. (2002). Complete characterization of the spherical spectral set. IEEE Trans. Automat. Contr. 47: 1875–1879
Collins G.E. and Hong H. (1991). Partial cylindrical algebraic decomposition for quantifier elimination. J. Symb. Comp. 12: 299–328
Davis P.J. (1975). Interpolation and Approximation. Dover (reprint), New York
Farouki R.T. and Han C.Y. (2004). Robust plotting of generalized lemniscates. Appl. Numer. Math. 51: 257–272
Gantmacher, F.R.: The Theory of Matrices, vol. 2. Chelsea, New York (1960)
Hoffman J.W., Madden J.J. and Zhang H. (2003). Psuedozeros of multivariate polynomials. Math. Comp. 72: 975–1002
Kharitonov V.L. (1978). Asymptotic stability of an equilibrium position of a family of systems of linear differential equations. Differensial’nye Uravneniya 14: 1483–1485
Kharitonov V.L. (1978). On a generalization of a stability criterion. Izv. Akad. Nauk. Kazakh. SSR Ser. Fiz. Mat. 1: 53–57
Marden M. (1966). Geometry of Polynomials. American Mathematical Society, Providence
Mosier R.G. (1986). Root neighborhoods of a polynomial. Math. Comp. 47: 265–273
Polyak B.T. and Tsypkin Ya. Z. (1991). Robust stability under complex perturbations of parameters. Automat. Rem. Contr. 52: 1069–1077
Stetter, H.J.: Polynomials with coefficients of limited accuracy. In: Computer Algebra in Scientific Computing—CASC ’99 (Munich), pp. 409–430. Springer, Berlin Heidelberg New York (1999)
Stetter H.J. (1999). The nearest polynomial with a given zero and similar problems. SIGSAM Bull. 33(4): 2–4
Toh K-C. and Trefethen L.N. (1994). Pseudozeros of polynomials and pseudospectra of companion matrices. Numer. Math. 68: 403–425
Zhang H. (2001). Numerical condition of polynomials in different forms. Elect. Trans. Numer. Anal. 12: 66–87
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Farouki, R.T., Han, C.Y. Root neighborhoods, generalized lemniscates, and robust stability of dynamic systems. AAECC 18, 169–189 (2007). https://doi.org/10.1007/s00200-006-0027-4
Received:
Revised:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00200-006-0027-4