Smart Buildings IoT Networks Accuracy Evolution Prediction to Improve Their Reliability Using a Lotka–Volterra Ecosystem Model

 , ,
, ,  , and
, and 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
1.1. Problem Formulation
1.2. Motivation
1.3. Model Description
- Predator and prey populations are limited by the maximum number of sensors in the IoT network (i.e., inaccurate + accurate sensors = total amount of sensors in the IoT network.)
- When there are no accurate sensors (prey) in the IoT network (i.e., all sensors are inaccurate), maintenance staff will be required to repair or replace inaccurate sensors.
- The total number of prey that predators can consume will be less than or equal to the total number of sensors in the IoT network.
- Both populations encounter each other randomly in the environment.
- In the absence of predators, , the equation for the prey is reduced to , being the intrinsic growth constant for x, until it reaches the total device number.
- In the absence of prey, , the equation for the predator takes the form of , which we know results in an exponential decrease and subsequent extinction (collapse) of the population (in this case, due to malfunctioning nodes substitution). As a consequence, c is therefore the intrinsic rate of decrease of y.
- The constant , which corresponds to the term crossed in the first equation, shows that the interactions between the two species, which are assumed to be proportional to the product of both populations, are unfavorable for the prey (hence the negative sign).
- Similarly, the constant corresponds to the crossed term in the second equation, which shows that encounters between individuals of both species are favorable for the predator.
1.4. Main Results
- As far as we know, this is the first time the behavior of AD and NAD is studied as an ecological system using predator–prey population models, being a ground-breaking approach that opens up many opportunities for new research as it is the first time an LV model has been applied to IoT study. This also has direct economic interest, as it has the potential to be applied in preventing economic loss caused by NAD.
- A novel approach for estimating the operating states of IoT nodes from a bio-inspired model of predator–prey relationships. The behavior of accurate and inaccurate sensors in the IoT network is also studied, knowledge of which will allow to optimise its operation of the IoT network
2. Proposed Approach
2.1. Successful Applications of the LV Model in Other Fields
2.2. LV System Applied to IoT Networks
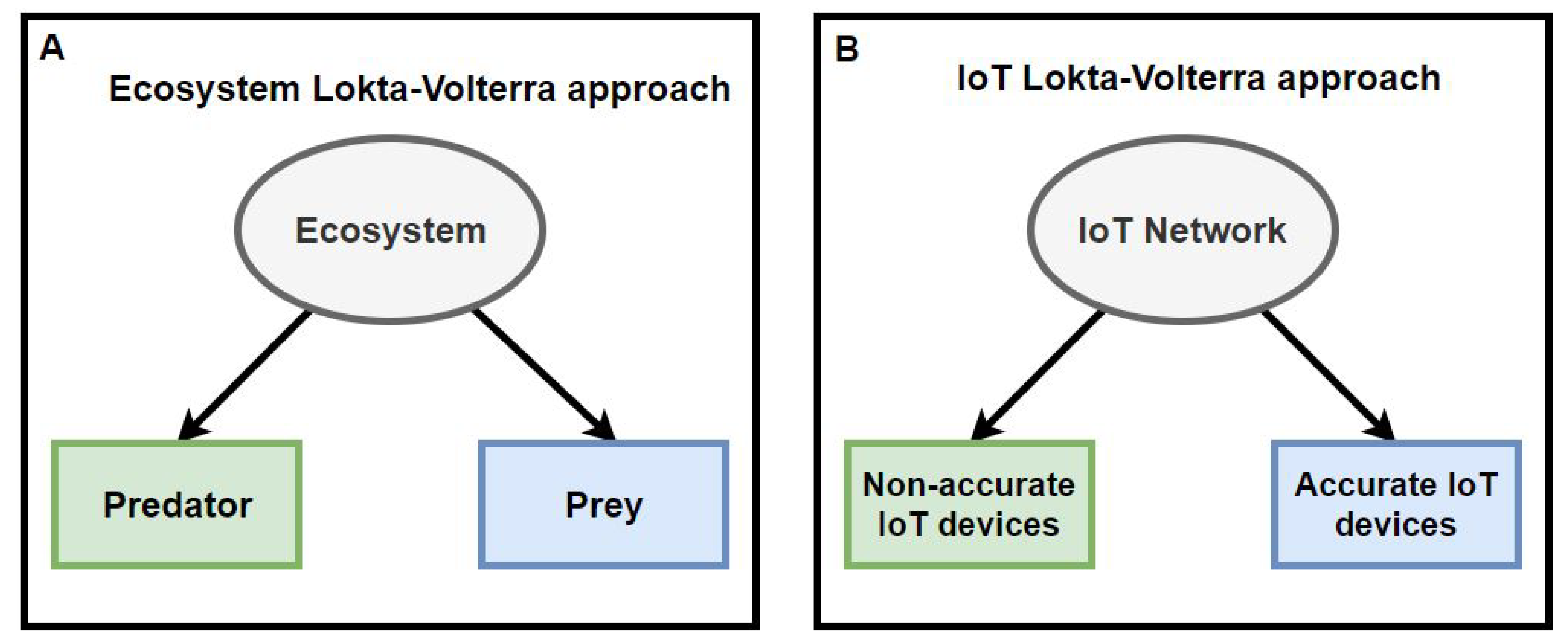
- Ecosystem:The ecosystem we are going to use for this model is an IoT network in a smart building. We have assumed that there will be two species in this ecosystem: (1) the accurate IoT devices. These devices collect data accurately or with an error below 15%, following Casado-Vara et al. in [6]. (2) The inaccurate IoT devices. These devices do not collect data accurately, with an error above 15%. In this ecosystem, we are going to consider that there is external interference, that is, a predator (inaccurate IoT device) can die through the external interference of maintenance personnel (removing it from the IoT network or repairing it). On the other hand, when maintenance personnel fix an IoT device or deploy a new one in the IoT network, we will consider it as the birth of a new prey in the ecosystem.
- Life cycle: The life cycle of IoT devices begins with their birth (i.e., the IoT devices are installed on the IoT network) and ends when they die (i.e., the IoT devices are removed from the IoT network). During its life cycle, an IoT device can be cured (repaired), which in our model would transform the predator (inaccurate IoT device) into a prey (accurate device).
- Predator: A species that lives in the ecosystem we are going to study (i.e., IoT network). We consider the inaccurate IoT devices as the predators.
- Prey: The accurate devices will be considered the prey in this ecosystem.
- Predator–prey interaction: The aim is to detail the predator–prey interaction. It is necessary to have this definition in mind since it is one of the key elements of predator–prey ecological models. In our ecosystem, we are going to consider that a predator kills a prey when a NAD gets an AD to start collecting erroneous data. In order to achieve this, the data quality algorithm developed by Casado-Vara et al. in [6] will be used. This algorithm makes a consensus between the IoT devices that are in the same area (i.e., they are the neighbors of the sensor whose precision is being observed); thus, applying this algorithm based on game theory, they can identify the IoT devices that are being accurate and inaccurate. In Figure 2, one can find a flowchart to shed some light to this “predator kills a prey” process.
2.3. Lotka–Volterra Non-Autonomous System
2.3.1. Properties of the Function g
- defined in and takes values in (i.e, ).
- is continuous in ).
- and for all .
- is upper and lower bounded when (i.e., with independent of t).
- 1.
- The interior of the first quadrant , its border, and the point are positively invariant sets of the system described in Equation (3).
- 2.
- Let be a solution of Equation (3) with initial conditions in . If the solution is bounded and remains confined to a single after a sufficiently long time, then it must converge to a point belonging to the set:If the solution remains confined to a , it cannot be (trajectories in this region penetrate ) or (trajectories in this region penetrate ).
- 3.
- Let be an Equation (3) solution that belongs to for big enough t. Then, either is delimited and converges to a point in or when for some .
2.3.2. Long-Term Behavior of Solutions
3. Results
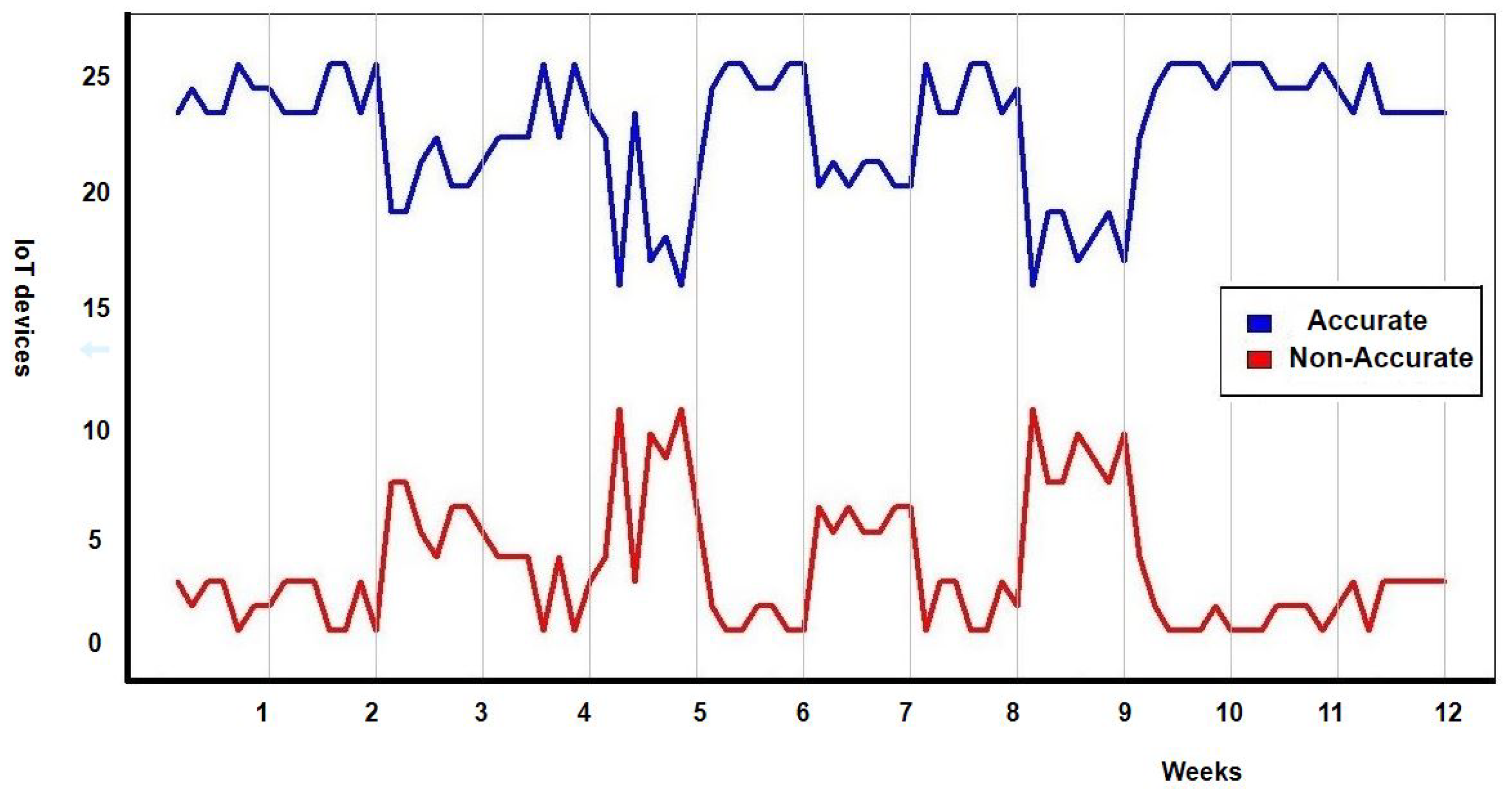
3.1. General Description of the Experiment
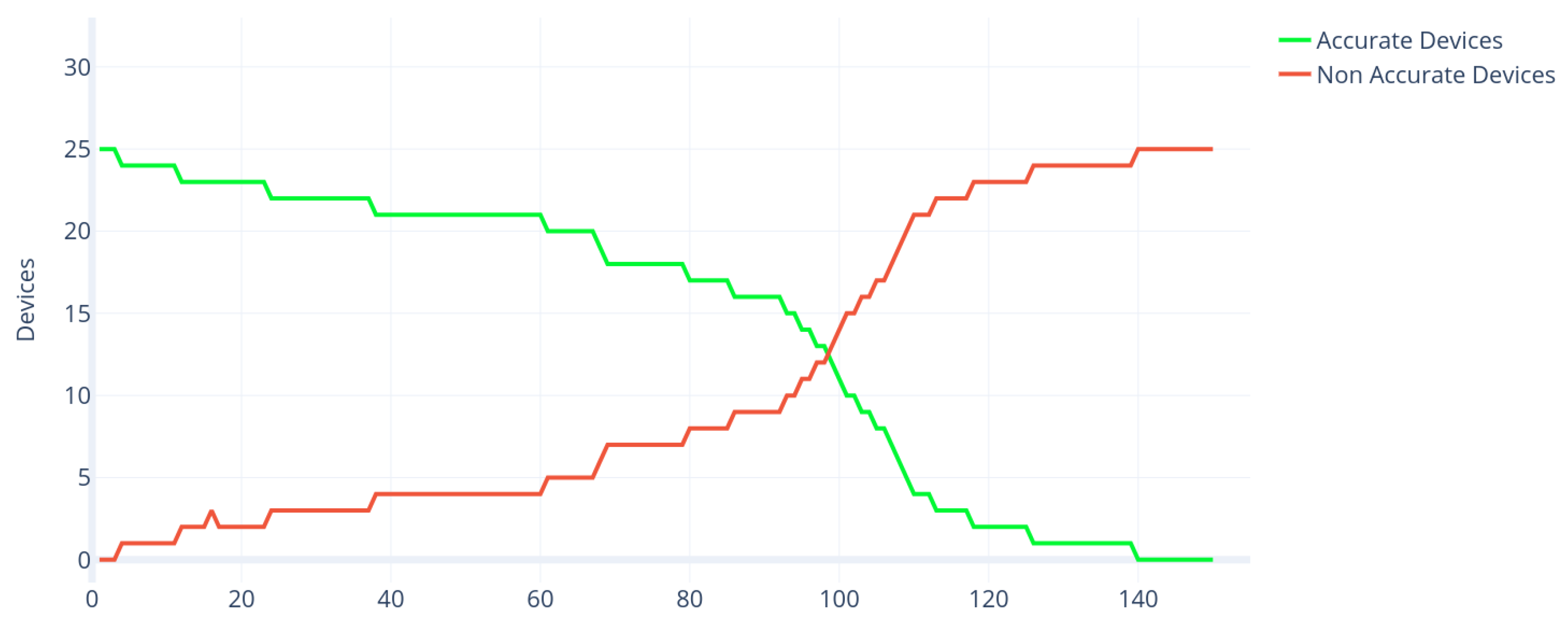
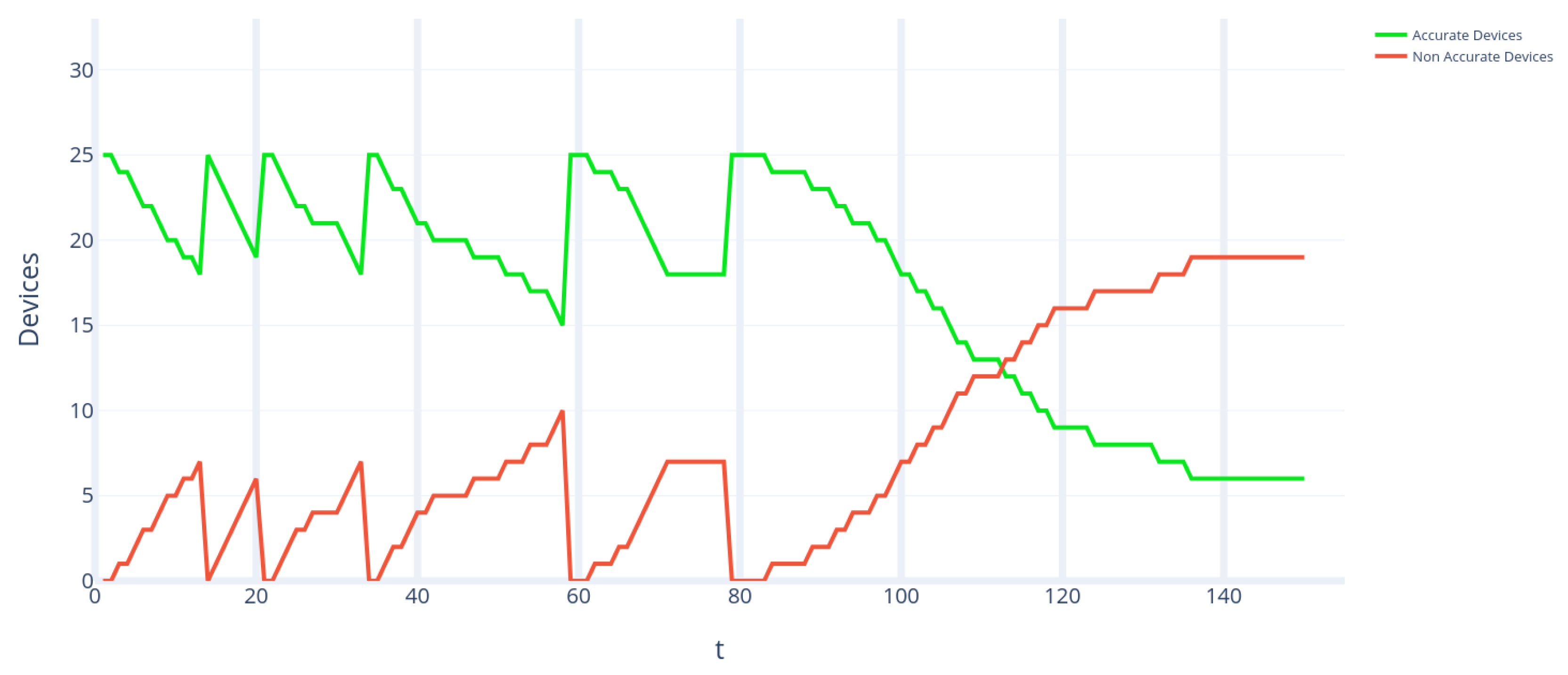
3.2. Case Study Results
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Chen, S.; Xu, H.; Liu, D.; Hu, B.; Wang, H. A Vision of IoT: Applications, Challenges, and Opportunities With China Perspective. IEEE Int. Things J. 2014, 1, 349–359. [Google Scholar] [CrossRef]
- Mo, Y.; Garone, E.; Casavola, A.; Sinopoli, B. False data injection attacks against state estimation in wireless sensor networks. In Proceedings of the 49th IEEE Conference on Decision and Control, Atlanta, GA, USA, 15–17 December 2010; pp. 5967–5972. [Google Scholar]
- Wagner, D. Resilient aggregation in sensor networks. SASN 2004, 4, 78–87. [Google Scholar]
- Choi, J.; Jeoung, H.; Kim, J.; Ko, Y.; Jung, W.; Kim, H.; Kim, J. Detecting and Identifying Faulty IoT Devices in Smart Home with Context Extraction. In Proceedings of the 48th Annual IEEE/IFIP International Conference on Dependable Systems and Networks (DSN), Luxembourg, 25–28 June 2018; pp. 610–621. [Google Scholar]
- Casado-Vara, R.; Novais, P.; Gil, A.; Prieto, J.; Corchado, J. Distributed Continuous-Time Fault Estimation Control for Multiple Devices in IoT Networks. IEEE Access 2019, 7, 11972–11984. [Google Scholar] [CrossRef]
- Casado-Vara, R.; Prieto-Castillo, F.; Corchado, J. A game theory approach for cooperative control to improve data quality and false data detection in WSN. Int. J. Robust Nonlinear Control 2018, 28, 5087–5102. [Google Scholar] [CrossRef]
- Lotka, A. Contribution to the Theory of Periodic Reactions. J. Phys. Chem. 1910, 14, 271–274. [Google Scholar] [CrossRef] [Green Version]
- Modarres, M. What Every Engineer Should Know about Reliability and Risk Analysis; CRC Press: Boca Raton, FL, USA, 2018. [Google Scholar]
- Abdo, H.; Kaouk, M.; Flaus, J.M.; Masse, F. A safety/security risk analysis approach of Industrial Control Systems: A cyber bowtie—Combining new version of attack tree with bowtie analysis. Comput. Secur. 2018, 72, 175–195. [Google Scholar] [CrossRef]
- Modarres, M.; Kaminskiy, M.P.; Krivtsov, V. Reliability Engineering and Risk Analysis: A Practical Guide; CRC Press: Boca Raton, FL, USA, 2016. [Google Scholar]
- Shiao, M.; Chen, T.K. Probabilistic Risk Assessment Tool AMETA (Aircraft Maintenance Event Tree Analysis) for Aircraft Structural Integrity and Fatigue Maintenance. In Proceedings of the AIAA Scitech 2019 Forum, San Diego, CA, USA, 7–11 January 2019; p. 2231. [Google Scholar]
- Kulkarni, V.G. Modeling and Analysis of Stochastic Systems; Chapman and Hall/CRC: Boca Raton, FL, USA, 2016. [Google Scholar]
- Wang, Y.; Shi, P.; Yan, H. Reliable control of fuzzy singularly perturbed systems and its application to electronic circuits. IEEE Trans. Circuits Syst. I Regul. Pap. 2018, 65, 3519–3528. [Google Scholar] [CrossRef]
- Wu, Z.G.; Dong, S.; Shi, P.; Zhang, D.; Huang, T. Reliable filter design of Takagi-Sugeno fuzzy switched systems with imprecise modes. IEEE Trans. Cybern. 2019, 1–11. [Google Scholar] [CrossRef]
- Liu, Y.; Ma, Y.; Wang, Y. Reliable sliding mode finite-time control for discrete-time singular Markovian jump systems with sensor fault and randomly occurring nonlinearities. Int. J. Robust Nonlinear Control. 2018, 28, 381–402. [Google Scholar] [CrossRef]
- Taleb-Berrouane, M.; Khan, F.; Amyotte, P. Bayesian Stochastic Petri Nets (BSPN)-A New Modelling Tool for Dynamic Safety and Reliability Analysis. Reliab. Eng. Syst. Saf. 2019, 193, 106587. [Google Scholar] [CrossRef]
- Li, B.; Lu, R.; Choo, K.K.R.; Wang, W.; Luo, S. On reliability analysis of smart grids under topology attacks: A stochastic petri net approach. ACM Trans. Cyber Phys. Syst. 2018, 3, 10. [Google Scholar] [CrossRef]
- Melani, A.H.; Murad, C.A.; Caminada Netto, A.; Souza, G.F.; Nabeta, S.I. Maintenance Strategy Optimization of a Coal-Fired Power Plant Cooling Tower through Generalized Stochastic Petri Nets. Energies 2019, 12, 1951. [Google Scholar] [CrossRef]
- Begon, M.; Harper, J.; Townsend, C. Ecology: Individuals, Populations and Communities; Wiley-Blackwell: Hoboken, NJ, USA, 1996. [Google Scholar]
- Ivanova, I.; Smorodinskaya, N.; Leydesdorff, L. On measuring complexity in a post-industrial economy: The ecosystem’s approach. In Quality & Quantity; Springer: Berlin, Germany, 2019; pp. 1–16. [Google Scholar]
- Zhou, L.; Wang, T.; Lyu, X.; Yu, J. A modified Lotka–Volterra model for the evolution of coordinate symbiosis in energy enterprise. In Proceedings of the IOP Conference Series: Earth and Environmental Science, Banda Aceh, Indonesia, 26–27 September 2018; Volume 113, p. 012094. [Google Scholar]
- Sun, J.; Li, Z.; Lei, J.; Teng, D.; Li, S. Study on the Relationship between Land Transport and Economic Growth in Xinjiang. Sustainability 2018, 10, 135. [Google Scholar] [CrossRef]
- Zou, C.; Wei, X.; Zhang, Q. Visual synchronization of two 3-variable Lotka–Volterra oscillators based on DNA strand displacement. RSC Adv. 2018, 8, 20941–20951. [Google Scholar] [CrossRef]
- Täuber, U.C. Fluctuations and correlations in chemical reaction kinetics and population dynamics. arXiv 2018, arXiv:1807.01248. [Google Scholar]
- Hu, W.; Pantazis, Y.; Katsoulakis, M.A. Isap-matlab package for sensitivity analysis of high-dimensional stochastic chemical networks. J. Stat. Softw. 2018, 85. [Google Scholar] [CrossRef]
- Perasso, A.; Richard, Q. Implication of age-structure on the dynamics of Lotka Volterra equations. Differ. Integral Equ. 2019, 32, 91–120. [Google Scholar]
- Meng, X.Y.; Qin, N.N.; Huo, H.F. Dynamics analysis of a predator–prey system with harvesting prey and disease in prey species. J. Biol. Dyn. 2018, 12, 342–374. [Google Scholar] [CrossRef]
- Chiang, S.Y. An application of Lotka–Volterra model to Taiwan’s transition from 200 mm to 300 mm silicon wafers. Technol. Forecast. Soc. Chang. 2012, 79, 383–392. [Google Scholar] [CrossRef]
- Gatabazi, P.; Mba, J.; Pindza, E. Fractional gray Lotka-Volterra models with application to cryptocurrencies adoption. Chaos Interdiscip. J. Nonlinear Sci. 2019, 29, 073116. [Google Scholar] [CrossRef]
- Gatabazi, P.; Mba, J.; Pindza, E. Modeling cryptocurrencies transaction counts using variable-order Fractional Grey Lotka-Volterra dynamical system. Chaos Solitons Fractals 2019, 127, 283–290. [Google Scholar] [CrossRef]
- Costa, F.P.D.; Pinto, J.T. A nonautonomous predator-prey system arising from coagulation theory. Int. J. Biomath. Biostat. 2010, 1, 129–140. [Google Scholar]
- Agarwal, R.P. Difference Equations and Inequalities: Theory, Methods, and Applications; CRC Press: Boca Raton, FL, USA, 2000. [Google Scholar]
- Kelley, W.G.; Peterson, A.C. Difference Equations: An Introduction with Applications; Academic Press: Cambridge, MA, USA, 2001. [Google Scholar]
- Sasaki, Y. An objective analysis based on the variational method. J. Meteorol. Soc. Jpn. Ser. II 1958, 36, 77–88. [Google Scholar] [CrossRef]
- Lord, M. The method of non-linear variation of constants for difference equations. IMA J. Appl. Math. 1979, 23, 285–290. [Google Scholar] [CrossRef]
- Lobry, C.; Sari, T. Migrations in the Rosenzweig-MacArthur model and the “atto-fox” problem. Revue Africaine de la Recherche en Informatique et Mathématiques Appliquées 2015, 20, 95–125. [Google Scholar]
- Jaksic, J.; Marone, L. Ecología de Comunidades; Universidad Católica de Chile: Santiago, Chile, 2007. [Google Scholar]







© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Casado-Vara, R.; Canal-Alonso, A.; Martin-del Rey, A.; De la Prieta, F.; Prieto, J. Smart Buildings IoT Networks Accuracy Evolution Prediction to Improve Their Reliability Using a Lotka–Volterra Ecosystem Model. Sensors 2019, 19, 4642. https://doi.org/10.3390/s19214642
Casado-Vara R, Canal-Alonso A, Martin-del Rey A, De la Prieta F, Prieto J. Smart Buildings IoT Networks Accuracy Evolution Prediction to Improve Their Reliability Using a Lotka–Volterra Ecosystem Model. Sensors. 2019; 19(21):4642. https://doi.org/10.3390/s19214642
Chicago/Turabian StyleCasado-Vara, Roberto, Angel Canal-Alonso, Angel Martin-del Rey, Fernando De la Prieta, and Javier Prieto. 2019. "Smart Buildings IoT Networks Accuracy Evolution Prediction to Improve Their Reliability Using a Lotka–Volterra Ecosystem Model" Sensors 19, no. 21: 4642. https://doi.org/10.3390/s19214642