
Abstract
More and more driver assistance systems are integrated into modern vehicles. This development results in a continuous rise in the complexity of these vehicles, as the functions have to comply to the corresponding safety standards. Testing and validating these functions on an automotive test bench instead of driving tests at closed proving grounds requires comprehensive stimulation of the involved sensors. In this article we are focusing on an approach for stimulating short-range radar sensors of a vehicle located on such a test bench. Coping with the requirements imposed by these types of sensors we investigate the usage of frequency multipliers and dividers in the frequency translation section of the radar stimulator. For this purpose, we provide an overview on different concepts for these multipliers and dividers. After reviewing the advantages and disadvantages of these devices, we provide measurement results of a stimulator setup applying this type of frequency translation.
Zusammenfassung
Fahrassistenzsysteme spielen eine immer größere Rolle in modernen Fahrzeugen. Die Integration dieser Systeme und die damit verbundene Einhaltung der nötigen Vorschriften und Sicherheitsstandards erhöhen die Komplexität der Fahrzeuge enorm. Um die Funktionsprüfung von Fahrassistenzsystemen auf dem Prüfstand durchführen zu können, ist eine umfassende Stimulation der Sensoren des Systems notwendig.
Dieser Beitrag behandelt einen Zugang zur Stimulation automotiver Radarsensoren für den Nahbereich auf einem Prüfstand. Dabei wurde die Verwendung von Frequenzmultiplikatoren und Dividierern im Frequenzumsetzungspfad des Radar-Stimulators untersucht. Der Artikel gibt einen Überblick über verschiedene Konzepte zur Realisierung dieser Funktionsblöcke. In der Folge werden die Vor- und Nachteile der in Verbindung mit einem Radar-Target-Stimulator verwendeten Konzepte aufgezeigt und Messergebnisse präsentiert.
Similar content being viewed by others


1 Introduction
Driver assistance and active safety functions evolve to an important factor in the perception of vehicles. Advanced Driver Assistance Systems (ADAS) like adaptive cruise control (ACC), collision mitigation and avoidance systems (CMS) or lane change assist (LCA) release the driver and support his awareness during monotonous driving tasks [1]. The integration of these solutions requires comprehensive sensing of the environment. The positions of moving and stationary objects surrounding the vehicle have to be detected and classified accurately. This functionality is mandatory for reacting adequately in all possible traffic scenarios [2].
From the variety of employed sensors the radar is already used successfully for many driver assistance functions. It has the unique ability to monitor the distance and velocity of detected objects. For this task, a significant effort was dedicated into the clustering of the point clouds of input signals related to a single physical object to its virtual correspondent. Extracting features from the scattered signals like radar cross-section (RCS) and Micro-Doppler, object classification can be achieved. This approach allows classifying objects in, for example, pedestrians, cars, trucks, etc.. Another important aspect of radar sensors is their ability to operate much better under harsh conditions such as rain, fog or snow as other types of sensors [2–7]. The importance of ADAS functions is also expressed by the negotiation achieved by the U.S. National Highway Traffic Safety Administration (NHTSA) with 20 carmakers. They agreed on voluntarily equip all production vehicles with CMS by 2020, a safety feature which is often enabled by radar sensors [6].
These benefits are driving carmakers to integrate more radar sensors into their products. As an example, Fig. 1 provides an overview of possible radar sensor locations at a car. Additionally, the relationship between the radar sensor types, i.e. short-range (SRR), mid-range (MRR) and long-range radar (LRR), and the corresponding ADAS functions is highlighted [3, 8]. Automotive Radar Sensors typically operate in the frequency range 76–81 GHz applying the Frequency Modulated Continuous Wave (FMCW) modulation scheme [6, 7, 9, 10]. LRRs operating under these prerequisites are capable to cover distances up to 250 m with spatial resolution typically around 0.5 m. To accomplish these specifications a bandwidth of the FMCW transmit signal of up to 1 GHz is utilised. The SRRs typically provide a detection range between 0.2 and 30 m, a range (object) resolution of 15 cm and a range accuracy of 7.5 cm while applying a transmit signal bandwidth of up to 4 GHz [8, 9].

Location of radar sensors in a car and the corresponding ADAS functions
The growing number of ADAS functions integrated into a vehicle, as highlighted before, increases the complexity and cost of its development [11]. Furthermore, it is a well established safety principle that computer-based systems should be considered unsafe unless convincingly argued otherwise (i.e., safety must be shown, not assumed). Therefore, ADAS safety features cannot be considered safe unless and until they meet widely accepted (software) safety standards [12]. These requirements demand for new methods to integrate simulation and test on each level of the validation chain. Especially for the development of ADAS safety functionality, the interaction between the car and the environment are very important and must be considered in detail. One way of validating these functionalities is closed proving ground and on-road testing under real-world conditions [13]. The restraints imposed by weather, lighting and other practical limitations makes the Vehicle-in-the-Loop (ViL) test approach an attractive alternative [13–16]. This test approach requires stimulating all underlying sensor systems appropriately. Focusing on the radar sensor and considering scenarios for the ViL test including traffic moving in close distance to the location of the sensor impose demanding requirements on the equipment stimulating the sensors [14, 16]. For an Over-the-Air (OTA) test a Radar Target Stimulator (RTS) must capture the signals transmitted by the radar sensor and process it corresponding to the scattering caused by the physical object which should be detected and, thereafter, retransmit it to the sensor. The time duration for such processing steps is limited by the speed of light required to go forth and back to the object which should be stimulated. Hence, the closer the object to be stimulated and the wider the bandwidth of the transmit signal of the radar sensor the more difficult the stimulation of the object comes.
In [14–16] we introduced radar target stimulation with application to ViL testing of ADAS functionality. In this article we are focusing on the stimulation of radar targets for SRRs. For this purpose, wideband signals must be processed with very low latency for a proper stimulation. Still complex traffic scenarios should be covered by the selected approach. For this goal, we summarise the implementation of a RTS in Sect. 2. In a typical RTS system one or more mixing stages are used to translate the Radio Frequency (RF) input signal into the Intermediate Frequency (IF) range and back again. In Sect. 3 we suggest using frequency dividers and multipliers for these frequency translation tasks. The advantages and disadvantages of this approach are discussed and different implementation approaches of frequency dividers are summarised. The performance of a RTS applying frequency dividers and multipliers is highlighted in Sect. 4 before we provide a summary of the concept in Sect. 5.
2 System concept
The operational principle of a radar sensor is based on analysing the electromagnetic waves scattered at different objects. By comparing the transmitted and the received waves, it evaluates the distance between the radar and the object (also called “target”) and the RCS which is related to the reflectivity of the object. Additionally, the angle of the received wave (i.e.: its direction) as well as the relative velocity can be detected [17, 18].
The aim of radar target stimulation is to capture the transmit signal of the radar, process it, and retransmit it to the sensor. By this procedure the RTS must ensure, that the radar sensor’s signal processing can retrieve the stated properties from the evaluation of its received signal [14–16]. Furthermore, this task must be accomplished for all objects which are concurrently present within the detection range of the sensor. To fulfil the stated requirements the RTS must introduce the following properties to the signal captured from the radar sensor for all targets independently [15, 16]:
-
a time delay corresponding to twice the distance to the target,
-
a Doppler frequency shift according to the relative velocity between the target and the sensor,
-
an attenuation based on the target’s RCS and distance.
-
the desired receive angle of the reflected wave
For RTS scenarios covering more than one object, it is usually simpler and more cost effective not to perform these manipulations at the RF range of the sensor’s transmit signal. Instead, the signal captured by the RTS is shifted to an IF at which these changes can be efficiently applied [14, 19–22]. This approach is summarised by the simplified block diagram presented in Fig. 2. Here, the sensor is stimulated OTA. By applying a single (fixed) antenna for the retransmission only one receive angle is supported. In this case the RTS captures the radar sensor’s transmit signal by the RX antenna and downconverts it to the IF range by mixing with the Local Oscillator (LO). Here, the RCS, time-delay and Doppler shift are introduced for each target separately. Thereafter, the responses for all targets are combined before they are upconverted to the RF and retransmitted to the sensor. Any image reject filtering and signal treatment associated with up- and downconversion are excluded to simplify the block diagram.

Basic principle of a RTS applying IF signal processing
The concept shown in Fig. 2 can be applied to any type of automotive radar (SRRs, MRRs, and LRRs). The typical detection range of SRRs (0.2 to 30 m) corresponds to a time delay of approx. 2 to 200 ns [17, 23]. From the RTS point of view, this time duration must include the time for the wave propagation from and to the sensor and also the frequency translations and IF signal processing. Due to this reason, the minimum distance for an OTA radar target stimulation is around 2–5 m in case of IF signal processing RTS implementations [14]. Moreover, even ultra-low latency digital signal processing systems capable of handling the full RF signal bandwidth are not able to meet these timing constrains for a real-time processing of the Doppler shift, RCS and time delay [15, 16]. Thus, the stimulation of SRRs demand for an analogue implementation of the IF signal processing in order to provide reasonably low stimulate-able target distances.
Despite of using an analogue implementation the wide RF signal bandwidths of SRR of up to 4 GHz make its realisation a demanding task as well. Depending on the selected IF frequency, large relative bandwidths can complicate the Doppler shift processing. If more than one target is required at the RTS, this processing step is typically implemented using vector modulators [24–26]. On the one hand, moving to a higher IF frequency range alleviate the requirements imposed on the vector modulators. On the other hand, the implementation of variable analogue delay lines gets- more lossy and costly.
In summary, the stimulation of multiple targets at a SRR is a demanding task. The complexity of the analogue implementation for the different processing steps depend on the selected IF frequency range. Lowering the IF simplifies the variable analogue delay line and impedes the vector modulator implementation. Hence, either lowering or increasing the IF range shifts complexity between the different processing steps. To reduce the complexity of the whole IF processing altogether, conceptually different solutions must be taken under consideration.
3 Frequency divider and multiplier based RTS system
The RTS system presented in Fig. 2 uses a mixer based frequency translation. In the ideal case, this approach performs a perfect shift of the input signal to a different frequency range. The bandwidth of the associated signals stays the same during this process. The phase noise produced by the LO generator is often the most important degradation mechanism associated with this frequency translation process [27]. The usage of a LO showing phase noise results in a slight spreading of the bandwidth of the input signal after the frequency translation [28]. For the RTS the impact of the phase noise is in a large part mitigated by applying the same LO for the down- and upconversion [14, 23].
A fundamentally different approach of frequency translation is highlighted in Fig. 3. Here, a frequency divider and multiplier perform the down- and upconversion. In a first step we will focus on the downconversion performed by the frequency divider. As the name suggests, a frequency divider divides a signal in the frequency domain. From a system engineering point of view the divider’s input signal is deconvoluted resulting in a downward shift of the input signals’ frequency as well as a compression of the bandwidth. Clearly, before sending the processed IF signal back to the radar, a signal reconstruction is needed. This is where the frequency multiplier comes into play. A frequency multiplier is a non-linear component which performs the multiplication of its input signal with itself. So, the signal is shifted upwards in the frequency domain and the bandwidth is enhanced again. Hence, if the downconversion in the receive (RX) path is accomplished by a frequency divider, the upconversion in the transmit (TX) path has to be performed by a multiplier (Fig. 3). The frequency divider and the frequency multiplier must show the same divider/multiplier factor.

Principle of frequency conversion with a divider and a multiplier
Two implementations of frequency dividers are commonly used: digital and analogue dividers [29]. Digital frequency dividers are realised with binary counters or shifting registers. For simple power-of-2 integer division, these kind of dividers are very easy to implement. An arrangement of clocked flip-flops can provide an accurate division which is frequency and phase coherent to the source. The operation frequency of digital dividers is restricted by the technology in which the circuitry in manufactured. CMOS based digital frequency dividers applying Current Mode Logic (CML) showed to be able to operate at frequencies as high as 80 GHz [30]. Implementation of digital frequency dividers in SiGe or InP Technology are demonstrated to handle input frequencies above 300 GHz [31].
Using properly designed input stages of the digital divider a certain input power range can be supported, in which the desired operation can be guaranteed. As the output of this divider type is composed of digital gates, only constant amplitude signals are provided. The loss of the information about the input signal magnitude is, therefore, the main drawback of digital frequency dividers. Apart from that, digital dividers would be a good choice for RTS applications. As long as the signal transmitted by the radar sensor shows a constant amplitude the RTS concept presented in Fig. 3 using digital frequency dividers can be applied. For the important class of FMCW radars this condition is commonly fulfilled.
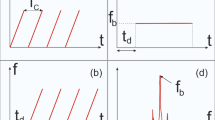
To overcome these problems, analogue frequency dividers provide an alternative approach. Below, two types of this class of dividers will be discussed. Firstly, the injection locked frequency dividers are one class of analogue frequency dividers, which are often used in phased locked loops (PLL). They work like injection locked oscillators. There, a continuous oscillation is provided by a LC tank which can be slightly changed by feeding a input signal showing a frequency in range of the oscillation frequency. The oscillator will lock onto the injected signal [32]. This behaviour also works when the injected signals’ frequency lies at harmonics or subharmonics of the oscillator. The disadvantage of this divider is the small locking frequency range and, therefore, the small bandwidth of the divider. For radar target stimulation also the continuous oscillation, independent from an applied input signal, is unwanted. Another class of analogue dividers are the so called regenerative frequency divider (RFD) also called Miller divider. This regenerative divider is a possible solution to the problems and disadvantages of the above mentioned dividers [33]. The schematic principle of the regenerative frequency divider is shown in Fig. 4 [33]. The basic circuit of this divider is a combination of a mixer (multiplier), an amplifier and a filter arranged in a closed loop. The input signal with a specific frequency \(\mathrm{f}_{0}\) is multiplied with a second signal at a frequency \(\mathrm{f}_{1}\). The output of the mixer consists of a lower and a upper sideband of the mixed input frequencies described by Eq. (1):
After removing the undesired frequency band with a following low pass filter, it’s output signal is fed back to the second port of the mixer (\(f_{1}\)), resulting in
Equation (2) reveals the behaviour of the RFD in its basic configuration. The circuits’ only possible output frequency is restricted to the half of the input signals frequency. As mentioned before, not only the frequency is divided by 2 but also the bandwidth is compressed by the same factor.

Block diagram of a regenerative frequency divider (divides by 2)
To achieve a higher order of division, the original circuit has to be modified as shown in Fig. 5 [33]. A multiplier with the factor \(n-1\) in the feedback loop changes the output frequency of the divider to,
which results in the output frequency of:

Block diagram of a divide by \(n\) regenerative frequency divider
These steady state conditions of such RFDs are rather simple but, in exchange, it is more complicated to get this circuit started [33–36]. The most important requirement in this context is meeting the so called Barkhausen criterion; the loop gain of the circuit has to be greater than unity as well as the phase shift in the loop must be a integer multiple of \(\pi \) [33].
If all conditions are met the RFD will lock onto a fraction of the input frequency and follows its changes. Hence, if no input signal is present the output signal will vanish, which is very useful for RTS applications. Another advantage is the level dependency of the output on the input signal [33]. Additionally, the already mentioned bandwidth compression and phase noise reduction compared to mixer / LO based downconversion make this divider a very good choice for the intended usage.
4 System results
To verify the mentioned principle of frequency division and bandwidth compression, measurements were performed. Therefore, the signal of an automotive radar was captured and provided as the input of a divide-by-four frequency divider. In order to measure the input and output signal of the divider the measurement setup presented in Fig. 6 was used. A picture of this setup identifying the corresponding measurement equipment is shown in Fig. 7. For receiving the signal of the radar, the radar sensor was positioned approximately 40 cm in front of a horn antenna. The centre frequency of this sensor was located at 76.25 GHz. As the available divider is characterised by a input frequency range of about 8 GHz, mixer based downconversion stage was required. Therefore, the radar transmit signal was frequency translated to 7.75 GHz using a LO generator at 68.5 GHz. Next, the IF output signal of the mixer is amplified to ensure the needed level at the input port of the divider for proper function. To measure the divider’s input signal a directional coupler connected to a spectrum analyser (SA) was used. With another SA the output signal of the divider following the directional coupler was observed.

Setup to measure the frequency division and bandwidth compression of the radar signal

Setup to measure the frequency division and bandwidth compression of the radar signal
The outcome of these measurements shows the functional principle of the divider by the spectra of the corresponding signals. Figure 8 depicts the input signal of the divider after the mixer-based downconversion and the additional amplification. The signal centred at 7.75 GHz shows a signal bandwidth of approximately 450 MHz. This illustrates the full bandwidth of the radar signal transmitted by the used automotive sensor. In comparison, Fig. 9 highlights the signal at the output port of the divide-by-four frequency divider. According to the behaviour of frequency dividers, mentioned in Sect. 3, the centre frequency of the signal is now at about 1.94 GHz. Furthermore, the bandwidth is compressed to about 112 MHz – a quarter of the original bandwidth.

Measured radar signal at the input of the divider

Measured radar signal at the output of the divider
4.1 Frequency divider & multiplier based RTS
After visualising the behaviour of the divider in a stand-alone configuration, the applicability of frequency dividers and multipliers for RTS systems shall be highlighted. Figure 10 presents the block diagram of the corresponding RTS setup. Additionally, the picture in Fig. 11 shows the used equipment for this demonstration. As in the former setup, the signal of an automotive radar sensor was downconverted by a mixer and the subsequent frequency divider. The output of the frequency divider was then provided to an analogue radar target stimulator [14]. In this unit all IF signal processing steps necessary for radar target stimulation are accomplished (i.e.: introduction of time-delay, Doppler shift, and RCS).

Blockdiagram to perform the full down- and upconversion with a divider and a multiplier

Setup to perform the full down- and upconversion with a divider and a multiplier
Here, an important difference to the RTS applying mixer based frequency translation techniques must be considered. The delaying of the IF input signal and the scaling according to the desired RCS are invariant to the signal compression caused by the frequency divider. On the contrary, the introduction of Doppler frequency shift must consider the signal expansion taking place in the following frequency multiplier based upconversion. Therefore, the Doppler shift at the frequency divider & multiplier based RTS is
where \(f_{D}\) is the frequency of the Doppler shift and \(n\) is the factor of the preceding frequency divider. It is important to note, that additionally to using \(f_{D,\mbox{divider}}\) instead of \(f_{D}\) no other changes apply to the IF processing. Hence, the same IF signal processing part of the RTS can be used independent of the considered frequency translation approach.
The processed IF signal was then connected to the upconversion branch. This part of the RTS is not arranged in the same way as the downconversion section. Instead, in a first step a mixer based translation was performed to a second IF frequency range at around 19 GHz. This signal was then fed into a combined \(4\,x\) frequency multiplier and TX antenna unit which was arranged in an array assembly. As indicated in Sect. 3, the usage of a divider in the downconversion branch demand a multiplier in the upconversion part showing the same conversion factor. A symmetrical setup of the RX and TX paths is not required.. Furthermore, the radar sensor was connected to a visualisation console, where the generated radar target was visible. With this setup, we successfully demonstrated the frequency translation by frequency dividers and multipliers in radar target stimulation applications.
Depending on the length of the connecting cables (compare Fig. 11) the minimum distance of stimulateable targets is around 2.5 m of the presented setup. The maximum distance is limited by the complexity introduced to the IF section of the analogue RTS.
5 Conclusion
ADAS and safety functions provide important features for modern cars. Their test and validation on a ViL testbend requires comprehensive stimulation solutions of the underlying sensor systems. The automotive radar sensors are a major component of these systems. Different types of radars (SRR to LRR) are used in a vehicle to monitor the surrounding environment. From these radars the SRR needs special attention. Most importantly the SRR OTA stimulation requires the support of complex traffic scenarios even at short distances without a-priori knowledge of the sensor itself.
In this article we introduce a RTS concept applying an alternative frequency translation approach to meet these specifications. For this purpose we discussed the mixer based RTS systems in Sect. 2. In this context we highlighted, that no clear optimum regarding the complexity of the corresponding IF processing can be found. To overcome this restriction we investigated different implementations of frequency dividers in Sect. 3. The main advantage of frequency dividers in RTS systems is their inherent signal compression capability. Additionally, they can downconvert an input signal without the need for a LO. Based on the considered implementation of the frequency dividers, different drawbacks were discussed. For the digital frequency divider the independence of the output signal on the amplitude of the input signal should be noted. Alternatively, the injection locked frequency divider will provide an output signal, even if no excitation is present. The regenerative frequency divider can overcome the stated limitations. Here, care must be taken to meet the requirements for starting the divider operation.
To highlight the operational principle of frequency dividers measurement results on the response of a frequency divider driven by a radar input signal were presented in Sect. 4. Thereafter, this approach was extended for a full RTS operation. We can proof that stimulating a radar sensor is possible using the frequency divider and multiplier concept. A minimum stimulateable distance for targets indicated by the visualisation of the radar sensor of around 2.5 m were accomplished in this context. In a next step the versatility of the presented setup will be improved in order to cope with the requirements imposed by a ViL testbed.
References
Watzenig, D., Horn, M. (Eds.) (2017): Automated driving. Berlin: Springer.
Meinl, F., Stolz, M., Kunert, M., Blume, H. (2017): An experimental high performance radar system for highly automated driving. In IEEE MTT-S international conference on microwaves for intelligent mobility, ICMIM (pp. 71–74).
Maurer, L., Haider, G., Knapp, H. (2011): 77 GHz SiGe based bipolar transceivers for automotive radar applications—an industrial perspective. In IEEE 9th international new circuits and systems conference (pp. 257–260).
Grimm, C., Breddermann, T., Farhoud, R., Fei, T., Warsitz, E., Haeb-Umbach, R. (2017): Hypothesis test for the detection of moving targets in automotive radar. In IEEE international conference on microwaves, antennas, communications and electronic systems. New York: IEEE.
Jamal, R., Heinze, R. (Eds.) (2017): Virtuelle Instrumente in der Praxis 2017. Berlin: VDE Verlag.
Spexarth, M. (2018): The future of automotive radar testing with modular solutions. Microwave J., 61(3), 22–26.
Suh, J. (2018): The future of automotive radar testing with integrated simulation software. Microwave J., 61(3), 34–38.
Wenger, J. (2005): Automotive radar – status and perspectives. In IEEE compound semiconductor integrated circuit symposium. New York: IEEE.
Meinel, H., Dickmann, J. (2013): Automotive radar: From its origins to future directions. Microwave J., 56(9), 24–40.
Karnfelt, C., Peden, A., Bazzi, A., Shhade, G. E. H., Abbas, M., Chonavel, T. (2009): 77 GHz ACC radar simulation platform. In 9th international conference on intelligent transport systems telecommunications. New York: IEEE.
Hegde, R., Mishra, G., Gurumurthy, K. S. (2011): An insight into the hardware and software complexity of ecus in vehicles. In D. C. Wyld, M. Wozniak, N. Chaki, N. Meghanathan, D. Nagamalai (Eds.), Advances in computing and information technology (pp. 99–106). Berlin: Springer.
Koopman, P., Wagner, M. (2016): Challenges in autonomous vehicle testing and validation. In SAE world congress (pp. 1–10).
Schyr, C., Brissard, A. (2016): DrivingCube—a novel concept for validation of powertrain and steering systems with automated driving functions. In 13th international symposium on advanced vehicle control. Boca Raton: CRC Press.
Gruber, A., Gadringer, M. E., Schreiber, H., Amschl, D., Bösch, W., Metzner, S., Pflügl, H. (2017): Highly scalable radar target simulator for autonomous driving test beds. In European radar conference (pp. 147–150). New York: IEEE.
Gadringer, M. E., Schreiber, H., Gruber, A., Vorderderfler, M., Amschl, D., Bösch, W., Metzner, S., Pflügl, H., Paulweber, M. Virtual reality of auntomotive radars, E&I, Elektrotech. Inf.tech. https://doi.org/10.1007/s00502-018-0620-9.
Gadringer, M. E., Maier, F. M., Schreiber, H., Makkapati, V. P., Gruber, A., Vorderderfler, M., Amschl, D., Metzner, S., Pflügl, H., Bösch, W., Horn, M., Paulweber, M. Radar target stimulation for automotive applications. IET Radar Sonar Navig. Accepted.
Jain, V., Heydari, P. (2012): Radar fundamentals. In Automotive radar sensors in silicon technologies (pp. 5–11). New York: Springer.
Kissinger, D. (2012): Millimeter-wave receiver concepts for 77 GHz. Automotive radar in silicon-germanium technology. Berlin: Springer.
Engelhardt, M., Pfeiffer, F., Biebl, E. (2016): A high bandwidth radar target simulator for automotive radar sensors. In 2016 European radar conference (EuRAD) (pp. 245–248).
Lutz, S., Erhart, C., Walte, T., Weigel, R. (2014): Target simulator concept for chirp modulated 77 GHz automotive radar sensors. In 11th European radar conference. New York: IEEE.
Komiyama, H., Yoshida, T., Onda, T., Suzuki, H. (2017): Radar test system 24, 77 and 79 GHz radar taget simulators. In European radar conference, workshop on automotive radar measurement solutions.
Graf, S., Rožmann, M. (2017): Ota radar test for autonomous driving based on a 77 GHz radar signal simulator. In European radar conference, workshop on automotive radar measurement solutions.
Skolnik, M. I. (2008): Radar handbook. 3rd ed. New York: McGraw-Hill.
Kpogla, D., Ng, C., Robertson, I. (2003): Shifted-quadrant microwave vector modulator. Electron. Lett., 39, 1058–1059.
Grajal, J., Gismero, J., Mahfoudi, M., Petz, F. (1997): A 1.4–2.7-GHz analog MMIC vector modulator for a crossbar beamforming network. IEEE Trans. Microw. Theory Tech., 45(10), 1705–1714.
Devices, A. (2004): Vector modulator ICs make it easy to control phase and gain. In High frequency electronics (pp. 60–61).
Lee, T., Hajimiri, A. (2000): Oscillator phase noise: a tutorial. IEEE J. Solid-State Circuits, 35, 326–336.
Weinberg, A. (1980): The effects of transponder imperfections on the error probability performance of a satellite communication system. Trans. Commun., 28, 858–872.
Fei, L. F. (2005): Frequency divider design strategies, RF Design 18–26.
Kim, D. D., Cho, C., Kim, J., Plouchart, J.-O., Lim, D. (2008): A low-power mmWave CML prescaler in 65 nm SOI CMOS technology. In Compound semiconductor integrated circuits symposium. New York: IEEE.
Ali, U., Bober, M., Thiede, A., Wagner, S. (2015): 100–166 GHz wide band high speed digital dynamic frequency divider design in 0.13 \(\mu \)m SiGe BiCMOS technology. In 10th European microwave integrated circuits conference (EuMIC) (pp. 72–76). New York: IEEE.
Rategh, H., Lee, T. (1999): Superharmonic injection-locked frequency dividers. IEEE J. Solid-State Circuits, 34, 813–821.
Miller, R. L. (1939): Fractional-frequency generators utilizing regenerative modulators. In Proceedings of the IRE (Vol. 27, pp. 446–457). New York: IEEE.
Derksen, R., Luck, V., Rein, H.-M. (1991): Stability ranges of regenerative frequency dividers employing double balanced mixers in large-signal operation. IEEE Trans. Microw. Theory Tech., 39(10), 1759–1762.
Harrison, R. G. (1989): Theory of regenerative frequency dividers using double-balanced mixers. In MTT-S international microwave symposium digest, New York: IEEE.
Helstrom, C. (1965): Transient analysis of regenerative frequency dividers. IEEE Trans. Circuit Theory, 12, 489–497.
Acknowledgements
Open access funding provided by Graz University of Technology. This work has been partially conducted within the ENABLE-S3 project which received funding from the ECSEL Joint Undertaking under grant agreement no 692455. This joint undertaking is supported by the European Union’s Horizon 2020 Research and Innovation Programme and Austria, Denmark, Germany, Finland, Czech Republic, Italy, Spain, Portugal, Poland, Ireland, Belgium, France, Netherlands, United Kingdom, Slovakia, and Norway.
Additionally, this work was also funded by the Austrian Research Promotion Agency (FFG) under the research project GAZELE (No.: 848457).
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

Cite this article
Vorderderfler, M., Gadringer, M.E., Schreiber, H. et al. Frequency dividers in radar target stimulator applications. Elektrotech. Inftech. 135, 344–351 (2018). https://doi.org/10.1007/s00502-018-0626-3
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00502-018-0626-3
Keywords
- radar systems
- test equipment
- radar applications
- radar equipment
- radar signal processing
- radio frequency circuit design