
Abstract
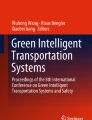
The current research of real-time observation for vehicle roll steer angle and compliance steer angle(both of them comprehensively referred as the additional steer angle in this paper) mainly employs the linear vehicle dynamic model, in which only the lateral acceleration of vehicle body is considered. The observation accuracy resorting to this method cannot meet the requirements of vehicle real-time stability control, especially under extreme driving conditions. The paper explores the solution resorting to experimental method. Firstly, a multi-body dynamic model of a passenger car is built based on the ADAMS/Car software, whose dynamic accuracy is verified by the same vehicle’s roadway test data of steady static circular test. Based on this simulation platform, several influencing factors of additional steer angle under different driving conditions are quantitatively analyzed. Then ɛ-SVR algorithm is employed to build the additional steer angle prediction model, whose input vectors mainly include the sensor information of standard electronic stability control system(ESC). The method of typical slalom tests and FMVSS 126 tests are adopted to make simulation, train model and test model’s generalization performance. The test result shows that the influence of lateral acceleration on additional steer angle is maximal (the magnitude up to 1°), followed by the longitudinal acceleration-deceleration and the road wave amplitude (the magnitude up to 0.3°). Moreover, both the prediction accuracy and the calculation real-time of the model can meet the control requirements of ESC. This research expands the accurate observation methods of the additional steer angle under extreme driving conditions.
Similar content being viewed by others
References
VAN ZANTEN A T, ERHARDT R, PFAFF G, et al. Control aspects of the Bosch-VDC[C]//International Symposium on Advanced Vehicle Control, Aachen, Germany, June 24–28, 1996: 576–607.
MITSCHKE M, WALLENTOWITZ H. Vehicle dynamics[M]. 4th ed. Beijing: Tsinghua University, 2009. (in Chinese)
LI Liang, LI Hongzhi, ZHANG Xiaolong, et al. Real-time tire parameters observer for vehicle dynamics stability control[J]. Chinese Journal of Mechanical Engineering, 2010, 23(5): 620–626.
FUKAD Y. Slip-angle estimation for vehicle stability control[J]. Vehicle System Dynamics, 1999, 32(4–5): 375–388.
KIN K, YANO O, URABE H. Enhancements in vehicle stability and steerability with slip control[J]. JSAE Review, 2003, 24(1): 71–79.
BOADA B L, BOADA M J L, DÍAZ V. Fuzzy-logic applied to yaw moment control for vehicle stability[J]. Vehicle System Dynamics, 2006, 43(10): 753–770.
ZHANG Xiaolong, LI Liang, SONG Jian, et al. Performance test and data processing method for vehicle electronic stability control system[J]. Transactions of the Chinese Society for Agricultural Machinery, 2011, 47(5): 1–6, 34. (in Chinese)
LI Liang, SONG Jian, LI Hongzhi, et al. A variable structure adaptive extended Kalman filter for vehicle slip angle estimation[J]. International Journal of Vehicle Design, 2011, 56(1–4): 161–185.
HARADA M, HARADA H. Analysis of lateral stability with integrated control of suspension and steering systems[J]. JSAE Review, 1999, 20(4): 465–470.
HE Yuanchao. Research for the method of the key parameter selection in dynamics stability control logic[D]. Beijing: Tsinghua University, 2010. (in Chinese)
ZHANG Xiaolong, LI Liang, LI Hongzhi, et al. Experimental research on vehicle sideslip angle estimation based on improved RBF neural networks[J]. Journal of Mechanical Engineering, 2010, 46(22): 115–110. (in Chinese)
SUYKENS J A K, VANDEWALE J. Least squares support vector machine classifier[J]. Neural Processing Letters, 1999, 9(3): 293–300.
RIBEIRO J G T, CASTRO J T P, FREIRE J L F. New improvements in the digital double integration filtering method to measure displacements using accelerometers[C]//Proceedings of the 19th International Modal Analysis Conference (IMAC XIX), Orlando, Florida, USA, February 5–9, 2001: 538–541.
HSU Chih-Wei, CHANG Chih-Chung, LIN Chih-Jen. A practical guide to support vector classification[EB/OL]. [2012-12-08]. http://www.csie.ntu.edu.tw/~cjlin.
U.S. Department of Transportation, Federal Motor Carrier Safety Admininstraton. Standard No. 126, Electronic stability control systems[EB/OL]. [2013-3-10]. http://www.fmcsa.dot.gov/rulesregul-ations/administration/fmcsr/fmcsrruletext.aspx?reg=571.126.
Author information
Authors and Affiliations
Corresponding author
Additional information
This project is supported by National Natural Science Foundation of China(Grant No. 51105001), and State Key Laboratory of Automotive Safety and Energy, Tsinghua University, China(Grant No. KF14022)
ZHANG Xiaolong, born in 1976, is currently an associate professor at Anhui Agricultural University, China. He received his PhD degree from Southeast University, China, in 2007 and experienced his Post-doctor research at Tsinghua University, China, from 2007 to 2010. His current research interests include wheel force transducer and vehicle dynamics control.
LI Liang, born in 1976, is currently an associate researcher at Tsinghua University, China. He received his PhD degree from Tsinghua University, China, in 2008. His research interests include vehicle dynamics and control, vehicle system simulation and controller development.
Rights and permissions
About this article
Cite this article
Zhang, X., Li, L., Pan, D. et al. Experimental model and analytic solution for real-time observation of vehicle’s additional steer angle. Chin. J. Mech. Eng. 27, 340–347 (2014). https://doi.org/10.3901/CJME.2014.02.340
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.3901/CJME.2014.02.340