Sensing the Submerged Landscape of Nisida Roman Harbour in the Gulf of Naples from Integrated Measurements on a USV

 ,
,  ,
,
Abstract
:
1. Introduction
- The protection of the underwater archaeological sites exposed to the waves action after its recent submersion.
- The management of the underwater cultural heritage as a witness of the effects of the ongoing climate changes on the ancient settlements as well as on the coastal modifications.
- assessing the main coastal changes of Nisida Roman harbour that occurred in the last 2000 years mainly due to the relative sea level variation by means of a multiscale elaboration of a transdisciplinary dataset;
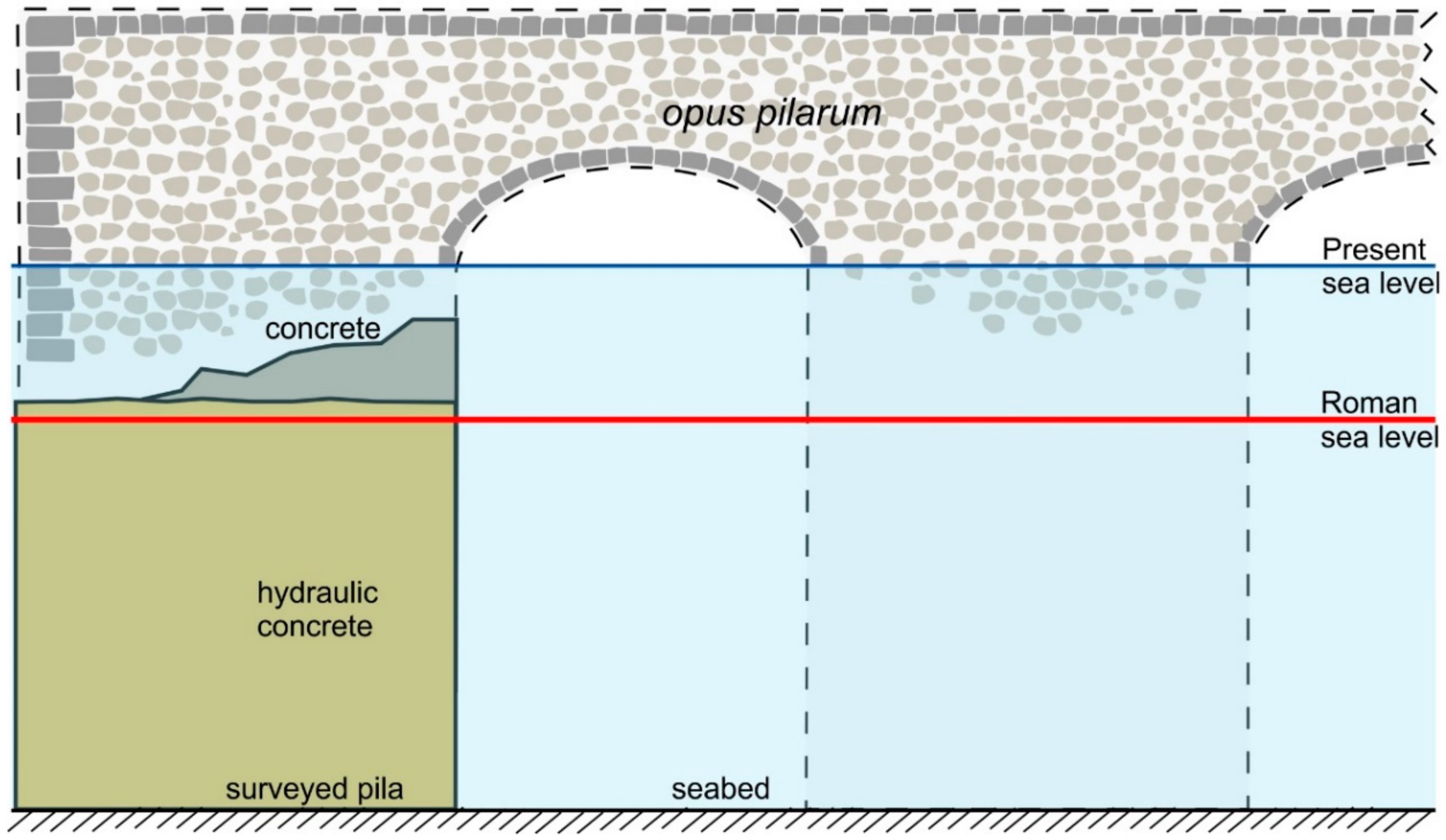
- the detection of a new type of archaeological sea level marker in the case of port-like structures made in hydraulic concrete; and
- the detailed documentation of a submerged archaeological site in the Gulf of Naples with a high cultural value and not accessible to everyone.
2. Geoarchaeological Background
Surveyed Area
3. Materials and Methods
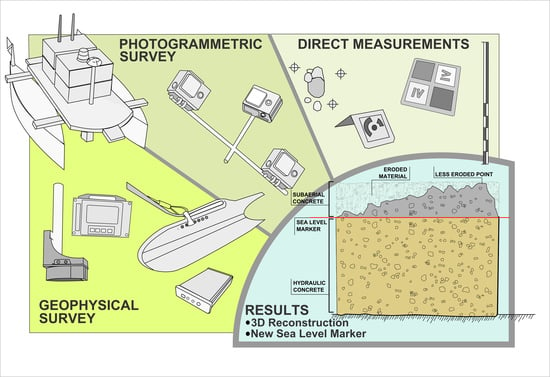
3.1. Survey
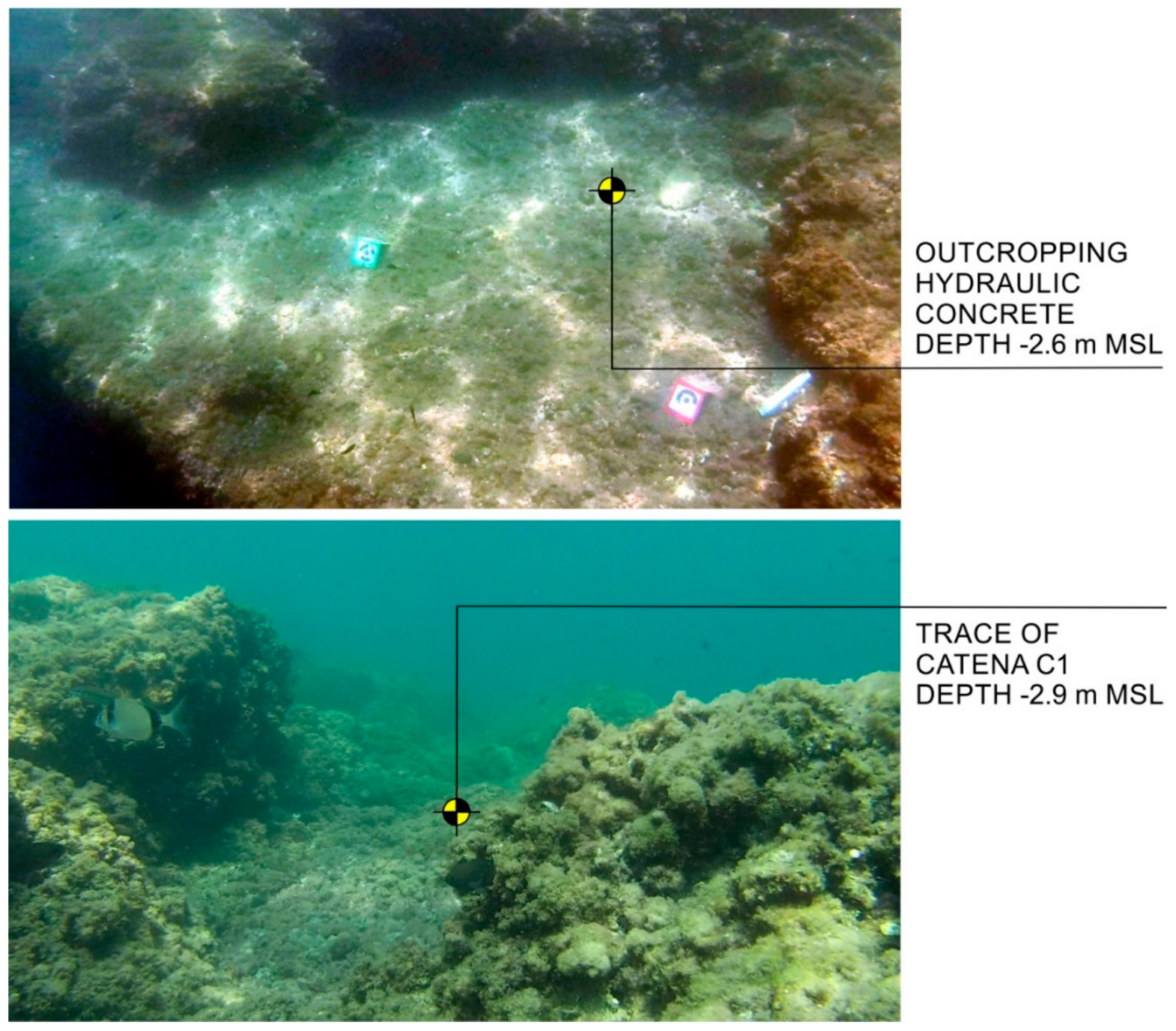
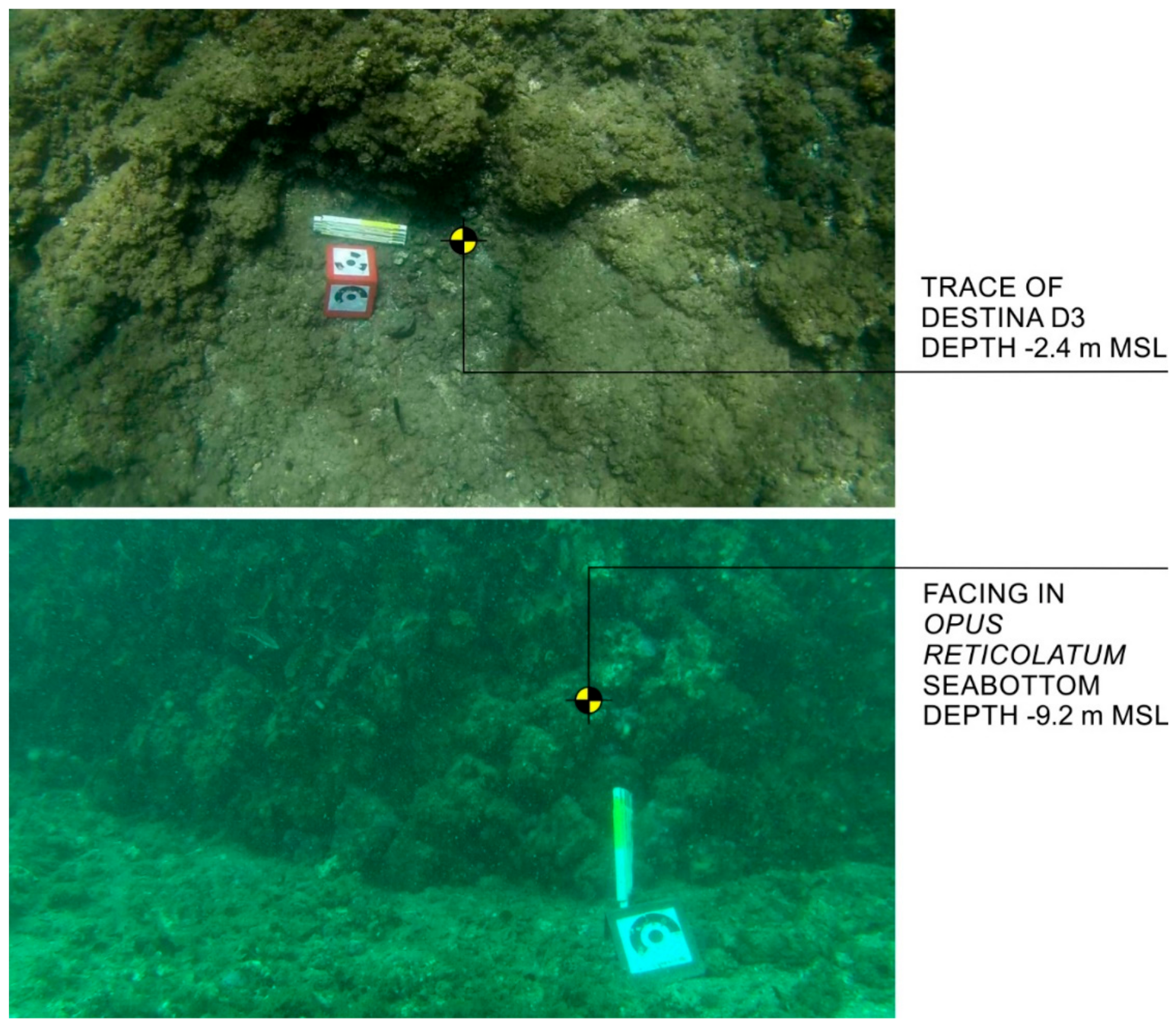
- precise reconstruction of the Roman structures still visible;
- evaluation of the conservation state of the more intact pila;
- 3D reconstruction of the underwater landscape in the study area; and
- detection of the measuring point for the evaluation of the relative sea level variations in the last 2000 years.
- 3100 m of bathymetric data;
- 30,000 m2 of SSS sonographs; and
- 62 min of high definition videos.
3.2. USV
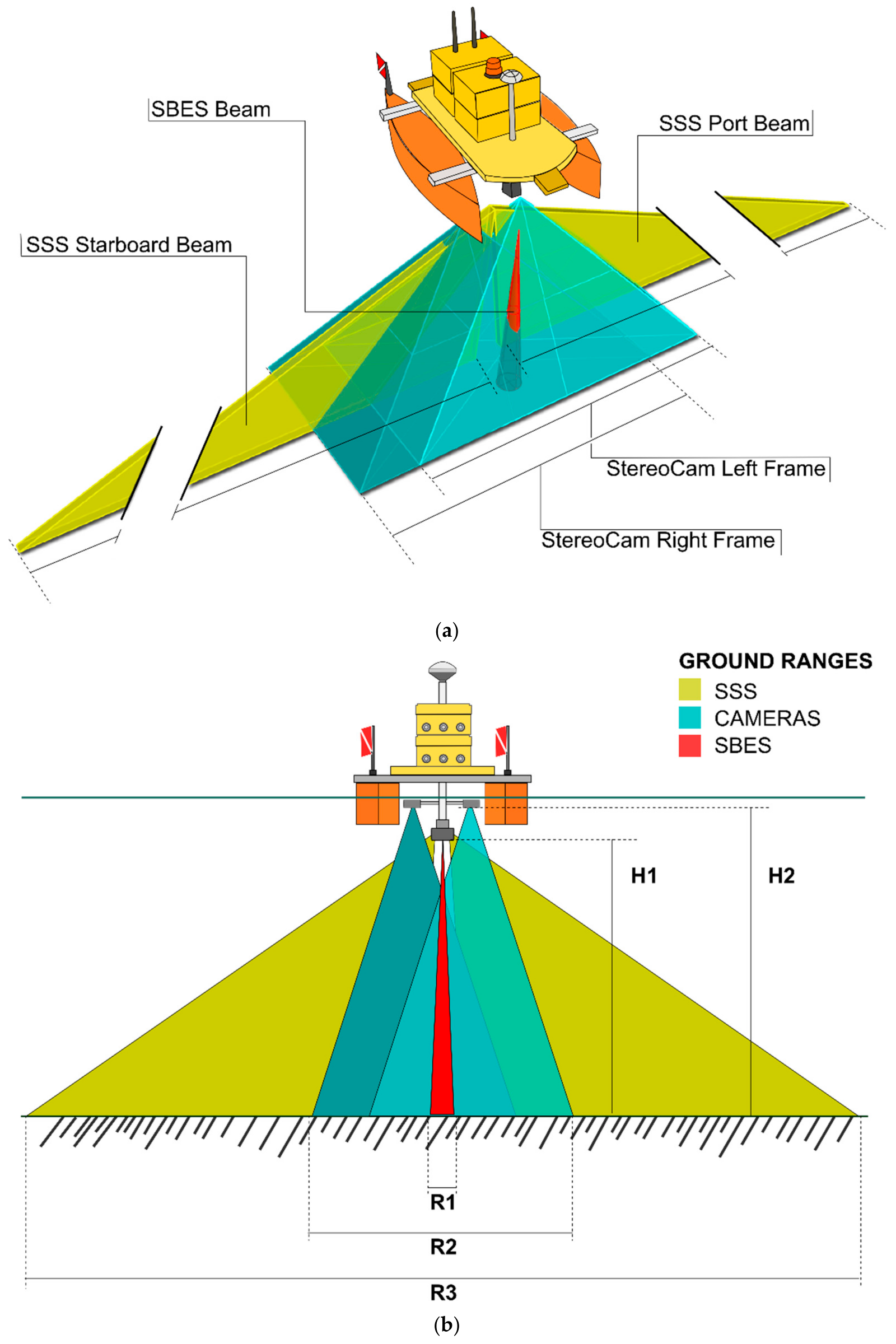
3.2.1. Acquisition Module
- A 200 KHz digital echosounder;
- A 450 KHz digital side scan sonar; and
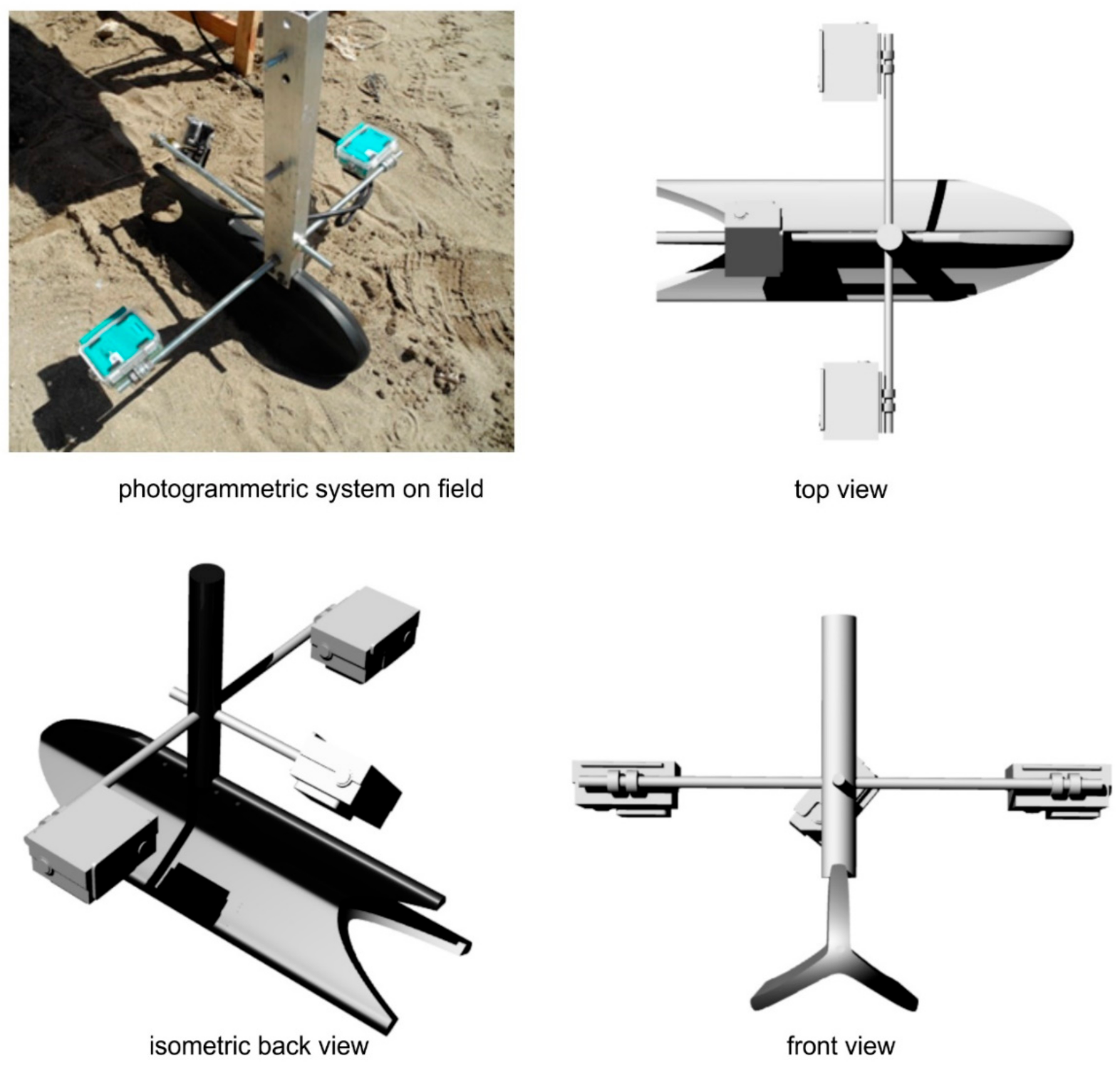
- A high definition 3 cam photogrammetric system.
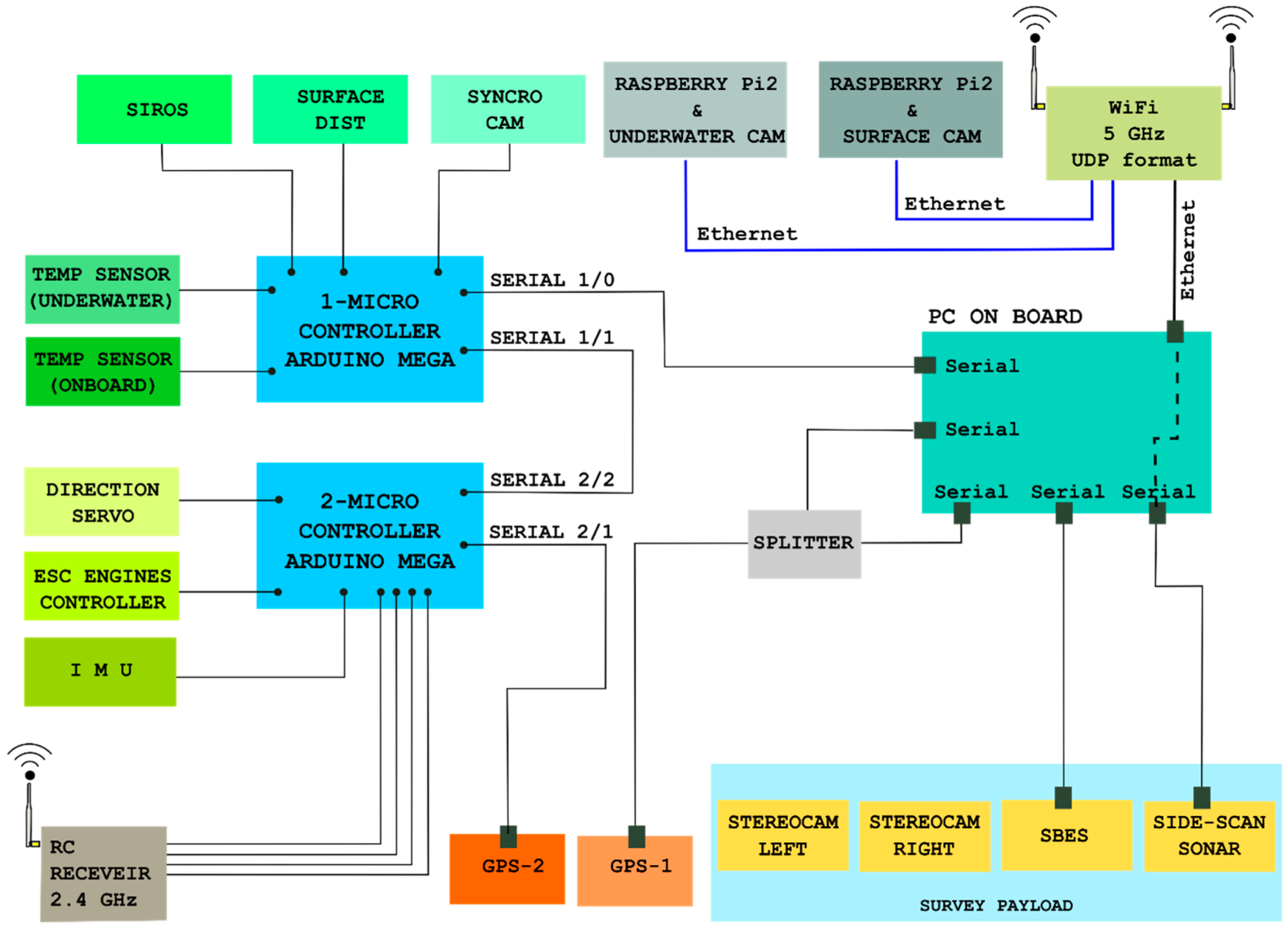
3.2.2. On-Board Computer System and Communications
3.2.3. Correction and Quality-Control Module
- payload changes and therefore variations in the vessel draught; and
- changes in USV attitude during the survey due to meteo-marine forcings.
4. Post-Processing and Data Elaboration
4.1. Bathymetric Data Post-Processing
4.2. SSS Data Post-Processing
4.3. Photogrammetric Data Post-Processing
- The videos at 30 fps recorded by the two Xiaomi cameras (previously calibrated in an underwater environment close to the study area to achieve the inner orientation parameters [54]) were synchronised using the trigger system and the images were extracted using every sixth frame. More than eight-thousand 1920 × 1080 images were thus obtained.
- The alignment procedure of the images was performed by Agisoft Photoscan software, subdividing them into several strips to reduce calculation times. For each strip, a dense point cloud was extracted and georeferenced by using the coordinates of the markers positioned on the pila that were determined by GPS Fast static procedure.
- The different point clouds were subsequently assembled in a single cloud using the open-source software CloudCompare through the classic ICP procedure [18].
- The whole point cloud, of almost 10 million points, can be decimated and exported in different formats compatible with GIS applications; the subsampling process was necessary to avoid visualisation problems with poor performance computers.
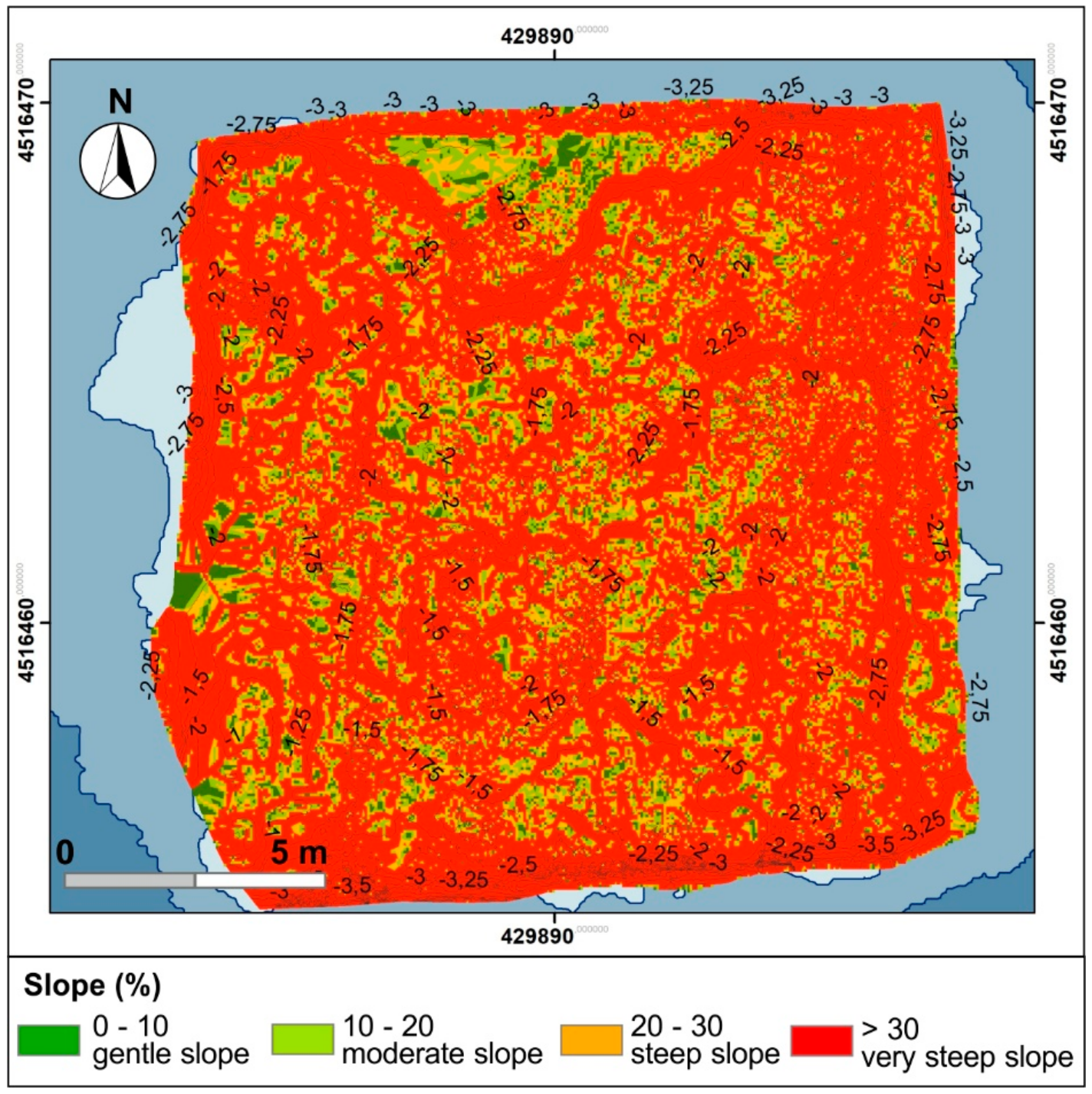
4.4. Morphometric Analysis of Three-Dimensional Data
- Calculate slop in per cent of the pilaDTM.
- Reclassify slope into four classes (gentle slope, moderate slope, steep slope and very steep slope).
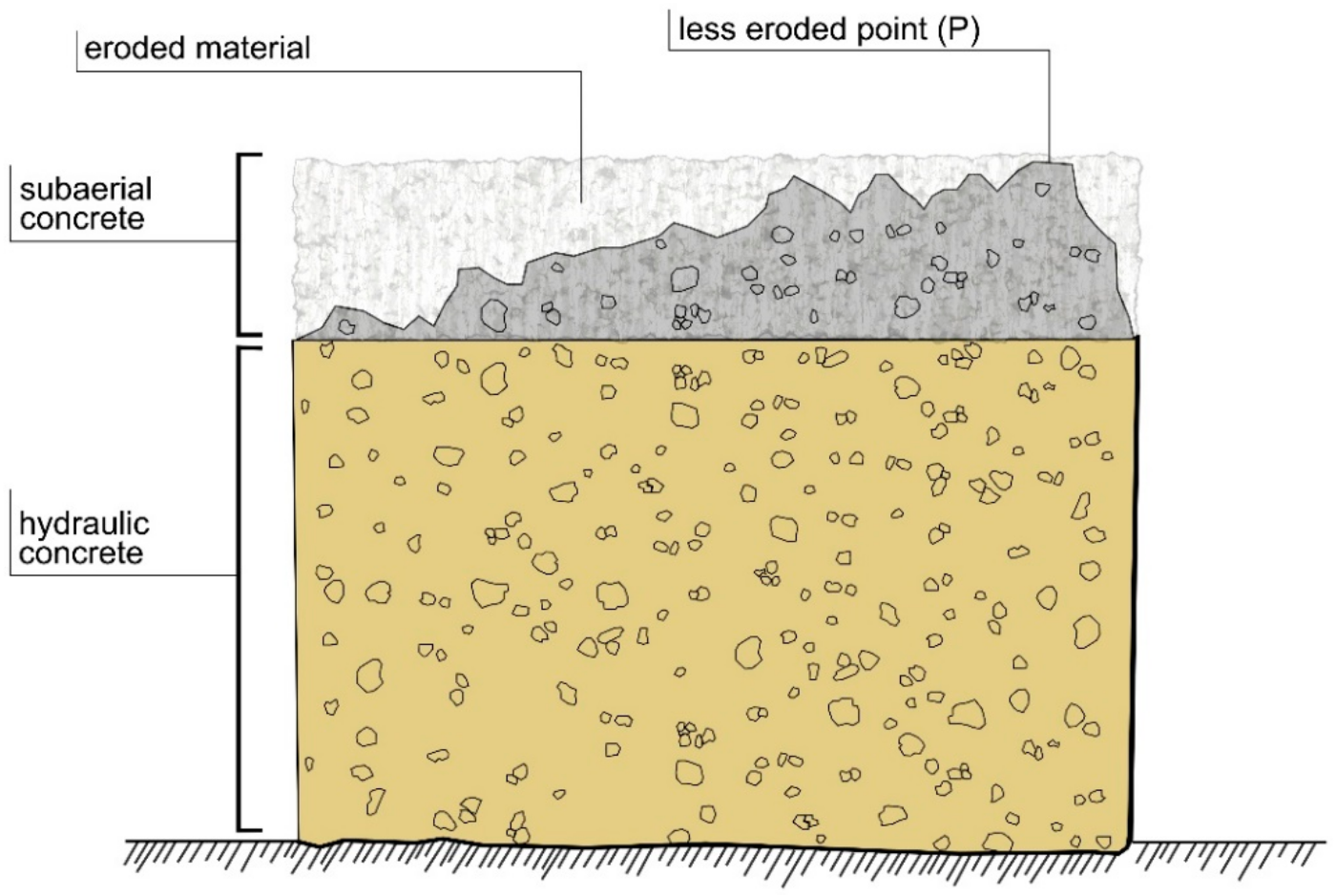
- Reconstruct a flat surface (topDTM) representing the top of the pilae before the action of the erosion processes.
- Calculate eroded volume between topDTM and pilaDTM.
5. Results
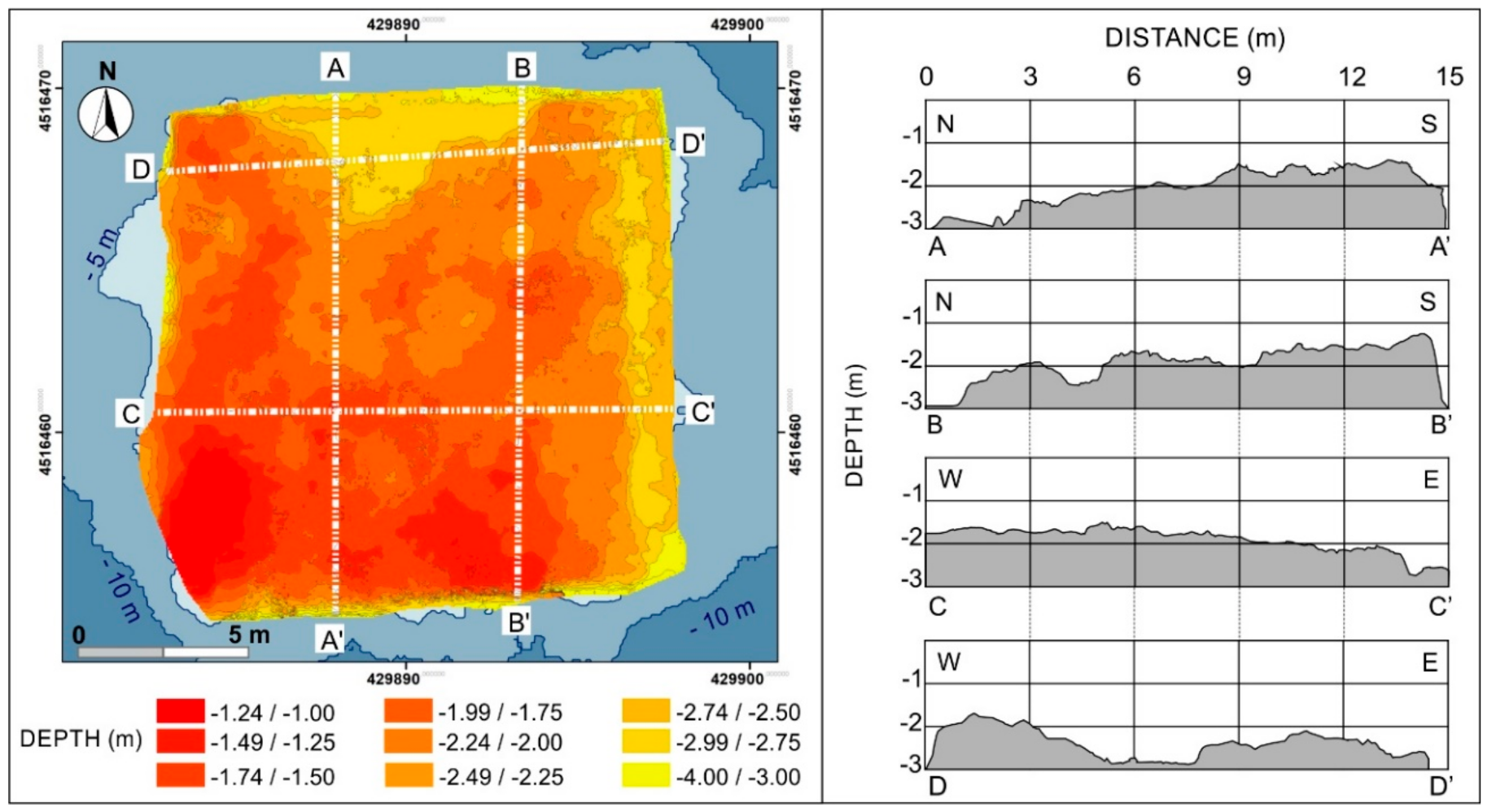
5.1. Small-Scale Data Elaboration
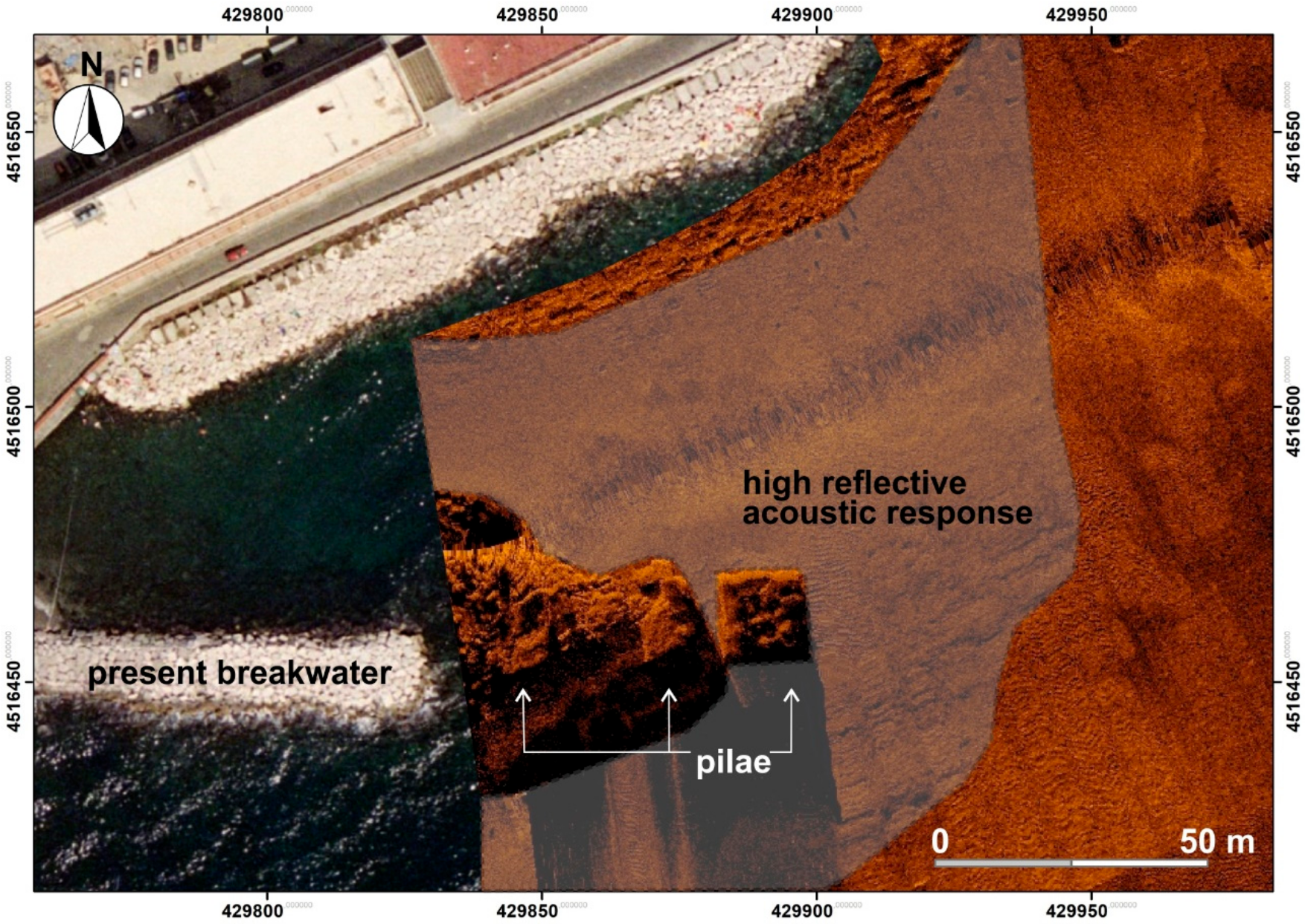
5.2. Large-Scale Data Elaboration
- the reconstruction of the archaeological structures to evaluate the conservation state of the better-preserved pila composing the ancient pier as well as to discriminate the erosive effects due to the waves action.
- the detection of a new type of sea level marker measuring point, useful in the case of port-like structures built in the hydraulic concrete cast and set underwater.
6. Discussion
7. Concluding Remarks
- the qualitative and quantitative characterisation of the underwater landscape in an archaeo-site with submerged structures;
- the morphometric analysis of an archaeological structure with a consequent assessment of its conservation state;
- the detailed four-dimensional documentation of a submerged archaeo-site difficult to access; and
- the definition of a new type of measuring point for a more precise evaluation of the relative sea level variation—in the last 2000 years—in the case of port-like structures built with the cofferdam technique in hydraulic concrete.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Goiran, J.-P.; Morhange, C. Geoarcheology of ancient Mediterranean harbours: Issues and case studies. Eng. Transl. E Willcox Topoï 2001, 11, 647–669. [Google Scholar]
- Parry, M.L.; Canziani, O.F.; Palutikof, J.P.; van der Linden, P.J.; Hanson, C.E. Climate change 2007: Impacts, adaptation, and vulnerability. In Contributions of Working Group II to the Fourth Assessment Report of the Intergovernmental Panel on Climate Change; Cambridge University Press: Cambridge, UK, 2007. [Google Scholar]
- Solomon, S.; Qin, D.; Manning, M.; Chen, Z.; Marquis, M.; Averyt, K.B.; Tignor, M.; Miller, H.L. Climate change 2007: The physical science basis. In Contributions of Working Group I to the Fourth Assessment Report of the Intergovernmental Panel on Climate Change; Cambridge University Press: Cambridge, UK, 2007. [Google Scholar]
- Amato, V.; Aucelli, P.P.C.; Mattei, G.; Pennetta, M.; Rizzo, A.; Rosskopf, C.M.; Schiattarella, M. A geodatabase of Late Pleistocene-Holocene palaeo sea-level markers in the Gulf of Naples. Alpine Mediterr. Quat. 2018, 31, 5–9. [Google Scholar]
- Aucelli, P.P.C.; Cinque, A.; Mattei, G.; Pappone, G. Late Holocene landscape evolution of the gulf of Naples (Italy) inferred from geoarchaeological data. J. Maps 2017, 13, 300–310. [Google Scholar] [CrossRef]
- Aucelli, P.P.C.; Cinque, A.; Mattei, G.; Pappone, G. Historical sea level changes and effects on the coasts of Sorrento Peninsula (Gulf of Naples): New constrains from recent geoarchaeological investigations. Palaeo3 2016, 463, 112–125. [Google Scholar] [CrossRef]
- Aucelli, P.P.C.; Cinque, A.; Giordano, F.; Mattei, G. A geoarchaeological survey of the marine extension of the Roman archaeological site Villa del Pezzolo, Vico Equense, on the Sorrento Peninsula, Italy. Geoarchaeology 2016, 31, 244–252. [Google Scholar] [CrossRef]
- McNamee, C.; Cyr, H.; Wilson, L. Multi-Scalar Approaches to Geoarchaeological Questions. Geoarchaeology 2013, 28, 191–194. [Google Scholar] [CrossRef]
- Wynn, R.B.; Huvenne, V.A.; Le Bas, T.P.; Murton, B.J.; Connelly, D.P.; Bett, B.J.; Sumner, E.J. Autonomous Underwater Vehicles (AUVs): Their past, present and future contributions to the advancement of marine geoscience. Mar. Geol. 2014, 352, 451–468. [Google Scholar] [CrossRef] [Green Version]
- Yoerger, D.R.; Bradley, A.M.; Jakuba, M.; German, C.R.; Shank, T.; Tivey, M. Autonomous and remotely operated vehicle technology for hydrothermal vent discovery, exploration, and sampling. Oceanography 2007, 20, 152–161. [Google Scholar] [CrossRef]
- German, C.R.; Yoerger, D.R.; Jakuba, M.; Shank, T.M.; Langmuir, C.H.; Nakamura, K. Hydrothermal exploration with the Autonomous Benthic Explorer. Deep Sea Res. I 2008, 55, 203–219. [Google Scholar] [CrossRef]
- Giordano, F.; Mattei, G.; Parente, C.; Peluso, F.; Santamaria, R. MicroVeGA (micro vessel for geodetics application): A marine drone for the acquisition of bathymetric data for GIS applications. The international archives of photogrammetry. Remote Sens. Spat. Inf. Sci. 2015, 40, 123–130. [Google Scholar]
- Giordano, F.; Mattei, G.; Parente, C.; Peluso, F.; Santamaria, R. Integrating sensors into a marine drone for bathymetric 3D surveys in shallow waters. Sensors 2016, 16, 41. [Google Scholar] [CrossRef] [PubMed]
- Eric, M.; Berginc, G.; Pugelj, M.; Stopinšek, Z.; Solina, F. The impact of the latest 3D technologies on the documentation of underwater heritage sites. In Proceedings of the Digital Heritage International Congress (DigitalHeritage), Marseille, France, 28 October–1 November 2013; Volume 2, pp. 281–288. [Google Scholar]
- Remondino, F.; Rizzi, A. Reality-based 3D documentation of natural and cultural heritage sites—Techniques, problems, and examples. Appl. Geomat. 2010, 2, 85–100. [Google Scholar] [CrossRef]
- Yastikli, N. Documentation of cultural heritage using digital photogrammetry and laser scanning. J. Cult. Herit. 2007, 8, 423–427. [Google Scholar] [CrossRef]
- Troisi, S.; Baiocchi, V.; Del Pizzo, S.; Giannone, F. A prompt methodology to georeference complex hypogea environments. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2017, 42, 639–644. [Google Scholar] [CrossRef]
- Troisi, S.; Del Pizzo, S.; Gaglione, S.; Miccio, A.; Testa, R.L. 3D models comparison of complex shell in underwater and dry environments. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2015, 40, 215–222. [Google Scholar] [CrossRef]
- Drap, P. Underwater Photogrammetry for archaeology. In Special Applications of Photogrammetry; Da Silva, D.D., Ed.; InTech Open: London, UK, 2012; pp. 112–135. [Google Scholar]
- Aucelli, P.; Cinque, A.; Mattei, G.; Pappone, G.; Rizzo, A. Studying relative sea level change and correlative adaptation of coastal structures on submerged Roman time ruins nearby Naples (southern Italy). Quat. Int. 2017. [Google Scholar] [CrossRef]
- Aucelli, P.P.C.; Cinque, A.; Mattei, G.; Pappone, G.; Stefanile, M. Coastal landscape evolution of Naples (Southern Italy) since the Roman period from archaeological and geomorphological data at Palazzo degli Spiriti site. Quat. Int. 2018, 483, 23–38. [Google Scholar] [CrossRef]
- Aucelli, P.P.C.; Cinque, A.; Mattei, G.; Pappone, G.; Stefanile, M. First results on the coastal changes related to local sea level variations along the Puteoli sector (Campi Flegrei, Italy) during the historical times. Alpine Mediterr. Quat. 2018, 31, 13–16. [Google Scholar]
- Cinque, A.; Aucelli, P.P.C.; Brancaccio, L.; Mele, R.; Milia, A.; Robustelli, G.; Romano, P.; Russo, F.; Russo, M.; Santangelo, N.; et al. Volcanism, tectonics and recent geomorphological change in the Bay of Napoli. Suppl. Geogr. Fis. Din. Quat. 1997, 3, 123–141. [Google Scholar]
- Fedele, L.; Morra, V.; Perrotta, A.; Scarpati, C.; Putignano, M.L.; Orrù, P.; Schiattarella, M.; Aiello, G.; D’Argenio, B.; Conforti, A. Note Illustrative Della Carta Geologica D’Italia Alla Scala 1:50.000, Foglio 465 Isola di Procida; Istituto Superiore per la Protezione e Ricerca Ambientale: Rome, Italy, 2015. [Google Scholar]
- Giordano, F.; Mattei, G.; Milia, A.; Torrente, M. Quaternary faulting off Ischia island (Italy): Preliminary results. Rend. Online Della Soc. Geol. Ital. 2013, 29, 74–77. [Google Scholar]
- Milia, A.; Torrente, M.M.; Russo, M.; Zuppetta, A. Tectonics and crustal structure of the Campania continental margin: Relationships with volcanism. Mineral. Petrol. 2003, 79, 33–47. [Google Scholar] [CrossRef]
- Di Vito, M.A.; Acocella, V.; Aiello, G.; Barra, D.; Battaglia, M.; Carandente, A.; Del Gaudio, C.; de Vita, S.; Ricciardi, G.P.; Ricco, C.; et al. Magma transfer at Campi Flegrei caldera (Italy) before the 1538 AD eruption. Sci. Rep. 2016, 6, 32245. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Santacroce, R.; Cioni, R.; Marianelli, P.; Sbrana, A.; Sulpizio, R.; Zanchetta, G.; Joron, J.L. Age and whole rock–glass compositions of proximal pyroclastics from the major explosive eruptions of Somma-Vesuvius: A review as a tool for distal tephrostratigraphy. J. Volcanol. Geotherm. Res. 2008, 177, 1–18. [Google Scholar] [CrossRef]
- Milia, A.; Torrente, M.M. The influence of paleogeographic setting and crustal subsidence on the architecture of ignimbrites in the Gulf of Naples (Italy). Earth Planet. Sci. Lett. 2007, 263, 192–206. [Google Scholar] [CrossRef]
- Corrado, G.; Amodio, S.; Aucelli, P.P.C.; Etro Incontri, P.; Pappone, G.; Schiattarella, M. Late Quaternary Geology and morphoevolution of the Volturno Coastal Plain, Southern Italy. Alpine Mediterr. Quat. 2018, 31, 23–26. [Google Scholar]
- Cinque, A.; Irollo, G.; Romano, P.; Ruello, M.R.; Amato, L.; Giampaola, D. Ground movements and sea level changes in urban areas: 5000 years of geological and archaeological record from Naples (Southern Italy). Quat. Int. 2011, 232, 45–55. [Google Scholar] [CrossRef]
- Strabone. Geographica, V Book, 23 AD; Loeb Classical Library Edition; Harvard University Press: Cambridge, MA, USA, 1923. [Google Scholar]
- Felici, E. La ricerca sui porti romani in cementizio: Metodi e obiettivi’, in Archeologia subacquea—Come opera l’archeologo sott’acqua. Storie dalle acque. In VIII Ciclo di Lezioni Sulla Ricerca Applicata in Archeologi; Volpe, G., Ed.; All’Insegna del Giglio: Firenze, Itlay, 1998; pp. 275–340. [Google Scholar]
- Felici, E. Costruire nell’acqua: I porti antichi. In Lezioni Fabio Faccenna, Conferenze di Archeologia Subacquea; Giacobelli, M., Ed.; Edipuglia: Bari, Italy, 2001; pp. 161–178. [Google Scholar]
- Felici, E. Ricerche sulle tecniche costruttive dei porti romani. J. Anc. Topogr. 2006, 16, 59–84. [Google Scholar]
- Stefanile, M. The Project PILAE, For an Inventory of the Submerged Roman Piers. A Preliminary Overview. Int. J. Environ. Geoinform. 2015, 2, 34–39. [Google Scholar] [CrossRef] [Green Version]
- Oleson, J.P.; Brandon, C.; Cramer, S.M.; Cucitore, R.; Gotti, E.; Hohlfelder, R.L. The ROMACONS Project: A Contribution to the Historican and Engineering Analysis of the Hydrauilc Concrete in Roman Maritime Structures. Int. J. Naut. Archaeol. 2004, 33, 199–229. [Google Scholar] [CrossRef]
- Hohlfelder, R.L.; Oleson, J.P.; Brandon, C. Building a Roman pila in the sea—Experimental Archaeology of Brindisi, Italy September 2004. Int. J. Naut. Archaeol. 2005, 34, 124–129. [Google Scholar]
- Brandon, C.J.; Hohlfelder, R.L.; Oleson, J.P. The concrete construction of the Roman harbours of Baiae and Portus Iulius, Italy: The ROMACONS 2006 field season. Int. J. Naut. Archaeol. 2008, 37, 374–379. [Google Scholar] [CrossRef]
- Gazda, E.K. Cosa’s Contribution to the Study of Roman Hydraulic Concrete: An Historiographic Commentary. In Classical Studies in Honor of Cleo Rickman Fitch; Goldman, N.W., Ed.; Peter Lang Pub Inc.: New York, NY, USA, 2001; pp. 145–177. [Google Scholar]
- Oleson, J.P.; Bottalico, L.; Brandon, C.; Cucitore, R.; Gotti, E.; Hohlfelder, R.L. Reproducing a Roman Maritime Structure with Vitruvian pozzolanic concrete. J. Roman Archaeol. 2006, 19, 31–52. [Google Scholar] [CrossRef]
- Painter, K. Roman Flasks with Scenes from Baiae and Puteoli. J. Glass Stud. 1975, 17, 54–67. [Google Scholar]
- Blackmann, D.J. Ancient Harbours in the Mediterranean, Part 1. Int. J. Naut. Archaeol. 1982, 11, 79–104. [Google Scholar] [CrossRef]
- Bejarano Osorio, M.A. Una ampolla de vidrio decorada con la planta topográfica de la ciudad de Puteoli. Mérida Excav. Arqueol. 2002, 8, 513–532. [Google Scholar]
- Benjamin, J.; Rovere, A.; Fontana, A.; Furlani, S.; Vacchi, M.; Inglis, R.H.; Mourtzas, N. Late Quaternary sea-level changes and early human societies in the central and eastern Mediterranean Basin: An interdisciplinary review. Quat. Int. 2017, 449, 29–57. [Google Scholar] [CrossRef]
- Lambeck, K.; Anzidei, M.; Antonioli, F.; Benini, A.; Esposito, A. Sea level in Roman time in the Central Mediterranean and implications for recent change. Earth Planet. Sci. Lett. 2004, 224, 563–575. [Google Scholar] [CrossRef]
- Auriemma, R.; Solinas, E. Archaeological remains as sea-level change markers: A review. Quat. Int. 2009, 206, 134–146. [Google Scholar] [CrossRef]
- Morhange, C.; Marriner, N. Archaeological and biological relative sea-level indicators. In Handbook of Sea Level Research; Shennan, I., Long, A., Horton, B.P., Eds.; Wiley: Oxford, UK, 2017; pp. 146–156. [Google Scholar]
- Severino, N. Recenti ricerche archeologiche sull’isola di Nisida. Orizz. Rass. Archeol. 2005, 6, 119–133. [Google Scholar]
- D’Arms, J. Romans on the Bay of Naples: A Social and Cultural Study of the Villas and Their Owners from 150 B.C. to A.D. 400; Harvard University Press: Cambridge, MA, USA, 1970. [Google Scholar]
- Gunther, R.T. Pausilypon, the Imperial Villa near Naples; Hart, H., Ed.; Oxford University Press: Oxford, UK, 1913. [Google Scholar]
- Gianfrotta, P.A. I porti dell’area flegrea. In Porti, Approdi e Rotte nel Mediterraneo Antico; Laudizi, G., Marangio, C., Eds.; Studi di Filologia e Letteratura 4: Galatina, Italy, 1998; pp. 155–168. [Google Scholar]
- Mattei, G.; Giordano, F. Integrated geophysical research of Bourbonic shipwrecks sunk in the Gulf of Naples in 1799. J. Archaeol. Sci. 2015, 1, 64–72. [Google Scholar] [CrossRef]
- Menna, F.; Nocerino, E.; Troisi, S.; Remondino, F. Joint alignment of underwater and above-the-water photogrammetric 3D models by independent models adjustment. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2015, 40, 143–151. [Google Scholar] [CrossRef]
- Lechtman, H.N.; Hobbs, L.W. Roman concrete and the Roman architectural revolution. Ceram. Civiliz. 1987, 3, 81–128. [Google Scholar]
- Lambeck, K.; Antonioli, F.; Anzidei, M.; Ferranti, L.; Leoni, G.; Scicchitano, G.; Silenzi, S. Sea level change along the Italian coast during the Holocene and projections for the future. Quat. Int. 2011, 232, 250–257. [Google Scholar] [CrossRef]
- Antonioli, F.; Ferranti, L.; Fontana, A.; Amorosi, A.; Bondesan, A.; Braitenberg, C.; Dutton, A.; Fontolan, G.; Furlani, S.; Lambeck, K.; et al. Holocene relative sea-level changes and vertical movements along the Italian and Istrian coastlines. Quat. Int. 2009, 221, 37–51. [Google Scholar] [CrossRef]
- Rovere, A.; Stocchi, P.; Vacchi, M. Eustatic and relative sea-level changes. Curr. Clim. Chang. Rep. 2016, 2, 221–231. [Google Scholar] [CrossRef]
- Vacchi, M.; Marriner, N.; Morhange, C.; Spada, G.; Fontana, A.; Rovere, A. Multiproxy assessment of Holocene relative sea-level changes in the western Mediterranean: Sea-level variability and improvements in the definition of the isostatic signal. Earth Sci. Rev. 2016, 155, 172–197. [Google Scholar] [CrossRef]
- Shennan, I.; Long, A.J.; Horton, B.P. (Eds.) Handbook of Sea-level Research; John Wiley & Sons: Oxford, UK, 2015; pp. 1–581. [Google Scholar]
- Van de Plassche, O. (Ed.) Sea-Level Research: A Manual for the Collection and Evaluation of Data; GeoBooks, Galliard (Printers) Ltd: Great Yarmouth, UK, 1986; pp. 1–603. [Google Scholar]
- Romano, P.; Di Vito, M.A.; Giampaola, D.; Cinque, A.; Bartoli, C.; Boenzi, G.; Detta, F.; Di Marco, M.; Giglio, M.; Iodice, S.; et al. Intersection of exogenous, endogenous and anthropogenic factors in the Holocene landscape: A study of the Naples coastline during the last 6000 years. Quat. Int. 2013, 303, 107–119. [Google Scholar] [CrossRef]




























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| MicroVEGA | General Characteristics |
|---|---|
| Length | 1.35 m |
| Beam | 0.86 m |
| Height | 0.60 m |
| Empty weight | 16 Kg |
| Max weight | 32 Kg |
| Speed Max/Cruise | 1/0.5 m/s |
| Endurance | 2 h at Speed Max |
| Standard Sensors | GPS, IMU, Compass |
| Payload | SBES, SSS, CAM 3D |
| Propulsion | 2 × brushless thruster 100 W |
| Communications | WiFi 5 GHz |
| Software | Tritech StarFish and TrackStar |
| Operative System | Windows, Linux and C++ |
| Power | 12 V × 35 Ah |
| Classes | Slope % | Type | Area (m2) | Area (%) |
|---|---|---|---|---|
| 1 | 0–10 | Gentle slope | 10.3 | 4.6 |
| 2 | 10–20 | Moderate slope | 23.6 | 10.6 |
| 3 | 20–30 | Steep slope | 26.9 | 12.1 |
| 4 | >30 | Very steep slope | 161.5 | 72.6 |
| ID | DIMENSION (m) | DEPTH (m) | Type |
|---|---|---|---|
| D1 | 0.3 × 0.4 | −2.4 | Destina |
| D2 | 0.4 × 0.3 | −2.3 | Destina |
| D3 | 0.4 × 0.6 | −2.4 | Destina |
| D4 | 0.5 × 0.3 | −2.5 | Destina |
| C1 | 13.9 × 0.5 | −2.9 | Catena |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mattei, G.; Troisi, S.; Aucelli, P.P.C.; Pappone, G.; Peluso, F.; Stefanile, M. Sensing the Submerged Landscape of Nisida Roman Harbour in the Gulf of Naples from Integrated Measurements on a USV. Water 2018, 10, 1686. https://doi.org/10.3390/w10111686
Mattei G, Troisi S, Aucelli PPC, Pappone G, Peluso F, Stefanile M. Sensing the Submerged Landscape of Nisida Roman Harbour in the Gulf of Naples from Integrated Measurements on a USV. Water. 2018; 10(11):1686. https://doi.org/10.3390/w10111686
Chicago/Turabian StyleMattei, Gaia, Salvatore Troisi, Pietro P. C. Aucelli, Gerardo Pappone, Francesco Peluso, and Michele Stefanile. 2018. "Sensing the Submerged Landscape of Nisida Roman Harbour in the Gulf of Naples from Integrated Measurements on a USV" Water 10, no. 11: 1686. https://doi.org/10.3390/w10111686