An Experimental Approach to Understanding the Impacts of Monitoring Methods on Use Intentions for Autonomous Vehicle Services: Survey Evidence from Japan


Abstract
:1. Introduction
2. Literature Review
3. Monitoring in AV Services
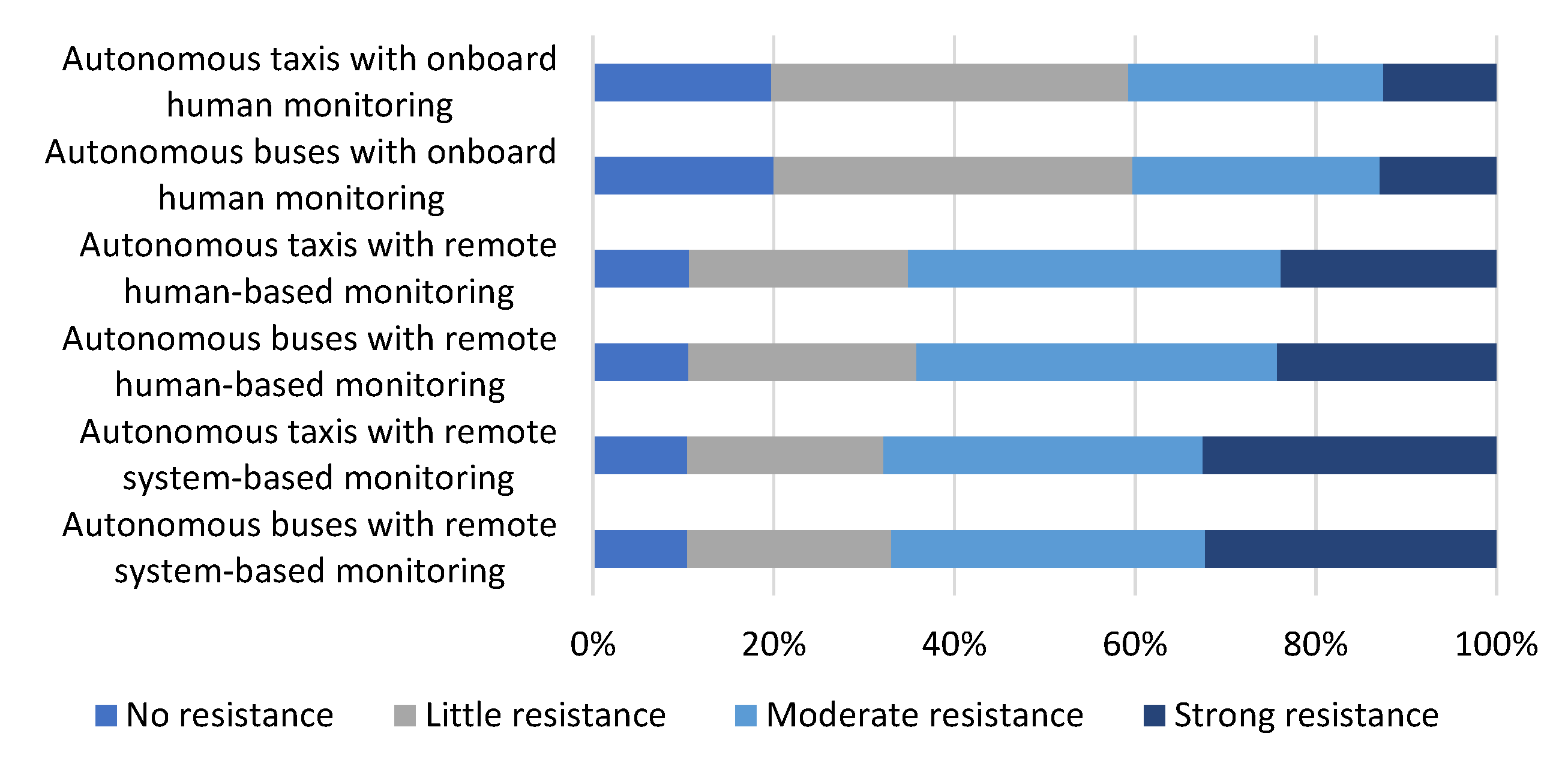
- Onboard human monitoring: Passengers are accompanied by an attendant. The attendant monitors events occurring inside and outside the vehicle in addition to the vehicle operation. In emergencies, the attendant directs and stops the vehicle.
- Remote human-based monitoring: Passengers ride unaccompanied, and an operator remotely monitors events occurring inside and outside the vehicle in addition to the vehicle operation. In emergencies, the remote operator directs and stops the vehicle. See Figure 1 for an illustration.
- Remote system-based monitoring: Passengers ride unaccompanied, and a computer system monitors events occurring inside and outside the vehicle in addition to the vehicle operation. When the system detects an emergency, a remote human operator directs and stops the vehicle. See Appendix A for more information. This method implies the minimal intervention of humans for monitoring AVs.
4. Method
4.1. Survey Design
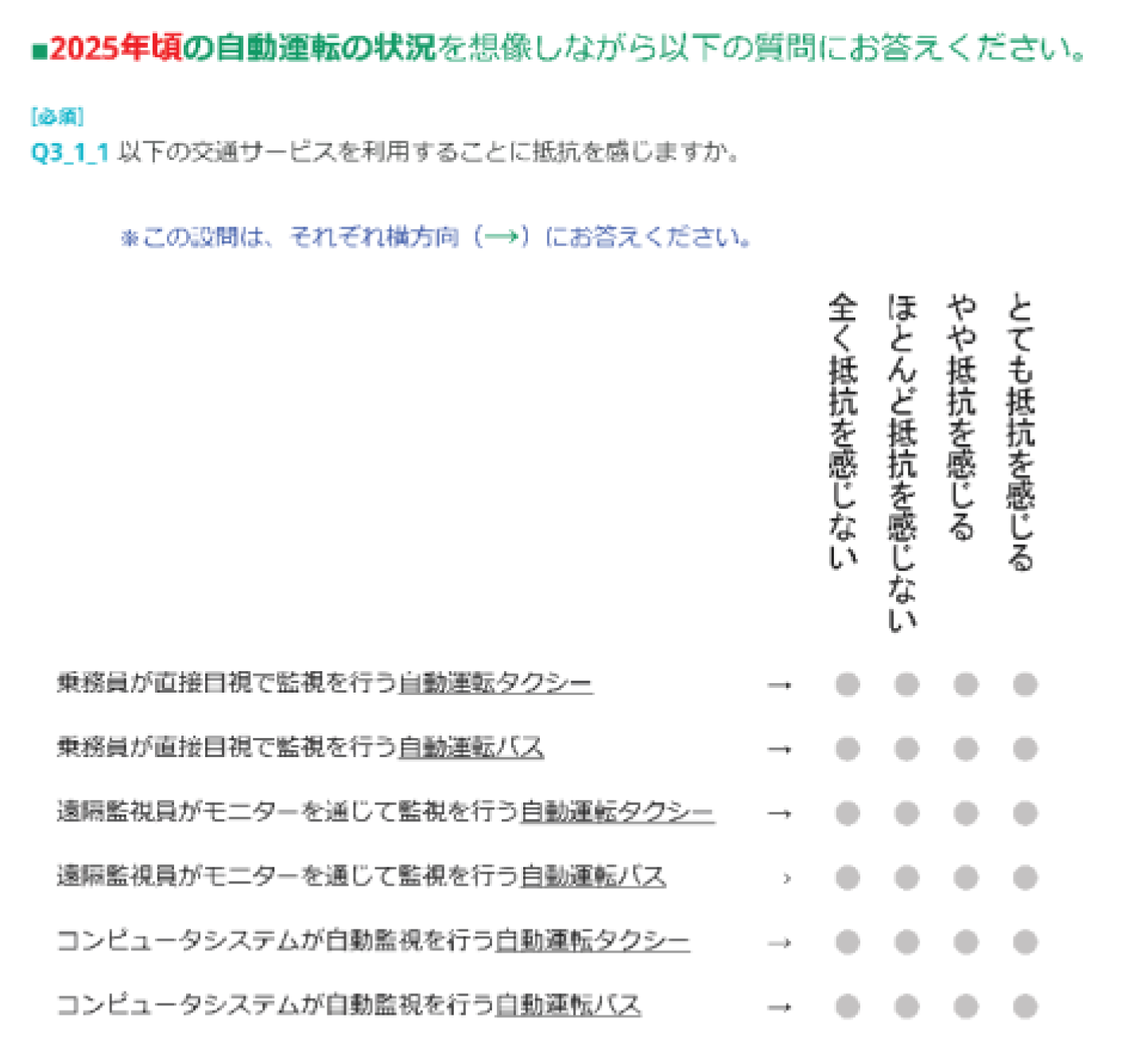
4.1.1. Questionnaire Items
4.1.2. Information Provision
4.1.3. Design of Stated Choice Experiment
4.1.4. Attitudes, Perception, and Experience
4.2. Survey Administration
4.3. Sample and Descriptive Statistics
4.4. Behavioral Model Specification
5. Results
5.1. Results of Direct Questioning
5.2. Results of Model Estimation with SP Data
6. Discussion and Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A. Questionnaire Sheet Relating to Information Provision on AVs
|

Appendix B. Questionnaire Sheet Relating to Items (3) and (4)


References
- Sage, A. Waymo Unveils Self-Driving Taxi Service in Arizona for Paying Customers. Reuters, 5 December 2018. Available online: https://www.reuters.com/article/us-waymo-selfdriving-focus/waymo-unveils-self-driving-taxi-service-in-arizona-for-paying-customers-idUSKBN1O41M2 (accessed on 16 July 2019).
- Tajitsu, N. Easy Ride Trial to Mark Nissan’s First Stop on Road to Taxi Services. Reuters, 23 February 2018. Available online: https://www.reuters.com/article/us-nissan-selfdriving/easy-ride-trial-to-mark-nissans-first-stop-on-road-to-taxi-services-idUSKCN1G70BP (accessed on 9 August 2018).
- Japan Automotive Daily. Odakyu Group, SB Drive Tie Up in Effort to Commercialize Self-Driving Buses, 8 June 2018. Available online: https://www.japanautomotivedaily.com/2018/06/08/odakyu-group-sb-drive-tie-up-in-effort-to-commercialize-self-driving-buses (accessed on 9 August 2018).
- Cabinet Office. SIP-Adus. The Government of Japan. Available online: http://en.sip-adus.go.jp/rd (accessed on 9 August 2018).
- Ministry of Land, Infrastructure, Transport and Tourism (MLIT). Necessary Procedure for Public Road Experiments of the Remote-Type Autonomous Driving System. Available online: https://www.mlit.go.jp/report/press/jidosha07_hh_000271.html (accessed on 26 June 2019). (In Japanese).
- Cabinet Secretariat. General Policy for Establishing a Legal System Concerning Autonomous Vehicles. The Government of Japan. Available online: https://www.kantei.go.jp/jp/singi/it2/kettei/pdf/20180413/auto_drive.pdf (accessed on 9 August 2018). (In Japanese).
- Ministry of Land, Infrastructure, Transport and Tourism (MLIT). Safety Guidelines for Autonomous Vehicles. Available online: http://www.mlit.go.jp/report/press/jidosha07_hh_000281.html (accessed on 21 February 2019). (In Japanese).
- Gkartzonikas, C.; Gkritza, K. What have we learned? A review of stated preference and choice studies on autonomous vehicles. Transp. Res. Part C Emerg. Technol. 2019, 98, 323–337. [Google Scholar] [CrossRef]
- Panagiotopoulos, I.; Dimitrakopoulos, G. An empirical investigation on consumers’ intentions towards autonomous driving. Transp. Res. Part C Emerg. Technol. 2018, 95, 773–784. [Google Scholar] [CrossRef]
- Salonen, A.O. Passenger’s subjective traffic safety, in-vehicle security and emergency management in the driverless shuttle bus in Finland. Transp. Policy 2018, 61, 106–110. [Google Scholar] [CrossRef]
- Train, E.T. Discrete Choice Methods with Simulation, 2nd ed.; Cambridge University Press: New York, NY, USA, 2009. [Google Scholar]
- Louviere, J.J.; Hensher, D.A.; Swait, J.D. Stated Choice Methods: Analysis and Application; Cambridge University Press: Cambridge, UK, 2000. [Google Scholar]
- Krueger, R.; Rashidi, T.H.; Rose, J.M. Preferences for shared autonomous vehicles. Transp. Res. Part C Emerg. Technol. 2016, 69, 343–355. [Google Scholar] [CrossRef]
- Yap, M.D.; Correia, G.; van Arem, B. Preferences of travellers for using automated vehicles as last mile public transport of multimodal train trips. Transp. Res. Part A Policy Pract. 2016, 94, 1–16. [Google Scholar] [CrossRef] [Green Version]
- Haboucha, C.J.; Ishaq, R.; Shiftan, Y. User preferences regarding autonomous vehicles. Transp. Res. Part C Emerg. Technol. 2017, 78, 37–49. [Google Scholar] [CrossRef]
- Steck, F.; Kolarova, V.; Bahamonde-Birke, F.; Trommer, S.; Lenz, B. How Autonomous Driving May Affect the Value of Travel Time Savings for Commuting. Transp. Res. Rec. 2018, 2672, 11–20. [Google Scholar] [CrossRef] [Green Version]
- Kolarova, V.; Steck, F.; Bahamonde-Birke, F.J. Assessing the effect of autonomous driving on value of travel time savings: A comparison between current and future preferences. Transp. Res. Part A Policy Pract. 2019, 129, 155–169. [Google Scholar] [CrossRef]
- Correia, G.H.; de, A.; Looff, E.; van Cranenburgh, S.; Snelder, M.; van Arem, B. On the impact of vehicle automation on the value of travel time while performing work and leisure activities in a car: Theoretical insights and results from a stated preference survey. Transp. Res. Part A Policy Pract. 2019, 119, 359–382. [Google Scholar] [CrossRef] [Green Version]
- Lavieri, P.S.; Garikapati, V.M.; Bhat, C.R.; Pendyala, R.M.; Astroza, S.; Dias, F.F. Modeling Individual Preferences for Ownership and Sharing of Autonomous Vehicle Technologies. Transp. Res. Rec. 2017, 2665, 1–10. [Google Scholar] [CrossRef] [Green Version]
- Nordhoff, S.; de Winter, J.; Kyriakidis, M.; van Arem, B.; Happee, R. Acceptance of Driverless Vehicles: Results from a Large Cross-National Questionnaire Study. J. Adv. Transp. 2018, 2018, 1–22. [Google Scholar] [CrossRef] [Green Version]
- Madigan, R.; Louw, T.; Wilbrink, M.; Schieben, A.; Merat, N. What influences the decision to use automated public transport? Using UTAUT to understand public acceptance of automated road transport systems. Transp. Res. Part F Traffic Psychol. Behav. 2017, 50, 55–64. [Google Scholar] [CrossRef]
- Xu, Z.; Zhang, K.; Min, H.; Wang, Z.; Zhao, X.; Liu, P. What drives people to accept automated vehicles? Findings from a field experiment. Transp. Res. Part C Emerg. Technol. 2018, 95, 320–334. [Google Scholar] [CrossRef]
- The National Examination Center for Motor Vehicle Operation Manager (NECO). Motor Vehicle Operation Manager. Available online: https://www.unkan.or.jp/about.html> (accessed on 26 June 2019). (In Japanese).
- Abe, R. Introducing autonomous buses and taxis: Quantifying the potential benefits in Japanese transportation systems. Transp. Res. Part A Policy Pract. 2019, 126, 94–113. [Google Scholar] [CrossRef]
- Aizaki, H. Basic Functions for Supporting an Implementation of Choice Experiments in R. J. Stat. Soft. 2012, 50, 1–24. [Google Scholar] [CrossRef] [Green Version]
- Akuto, H. Handbook of Social Survey; Nikkei Publishing: Tokyo, Japan, 1987. (In Japanese) [Google Scholar]
- Dong, X.; DiScenna, M.; Guerra, E. Transit user perceptions of driverless buses. Transportation 2019, 46, 35–50. [Google Scholar] [CrossRef]
- Nielsen, T.A.S.; Haustein, S. On sceptics and enthusiasts: What are the expectations towards self-driving cars? Transp. Policy 2018, 66, 49–55. [Google Scholar] [CrossRef] [Green Version]
- Fraszczyk, A.; Mulley, C. Public Perception of and Attitude to Driverless Train: A Case Study of Sydney, Australia. Urban Rail Transit 2017, 3, 100–111. [Google Scholar] [CrossRef] [Green Version]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Attribute | Levels of Alternative 2 (Autonomous Taxi) |
|---|---|
| Travel cost per capita | 30%|50%|70% × current taxi fare (per capita) |
| In-vehicle time | 50%|70%|100% × current taxi (car) travel time |
| Other time (e.g., wait time and time required to get to a station) | 2 min|6 min|10 min |
| Monitoring method (Alternative 2 only) | Onboard human|Remote human-based|Remote system-based |
| Variable | Percentage (n = 1962, Original Sample) | Percentage (n = 1663, Sample in Analysis with SP Data) |
|---|---|---|
| Age | ||
| 20–24 | 1.5% | 1.3% |
| 25–34 | 11.7% | 12.4% |
| 35–44 | 23.2% | 23.0% |
| 45–54 | 30.2% | 30.1% |
| 55–64 | 22.4% | 22.3% |
| 65–74 | 11.0% | 10.9% |
| Female | 38.5% | 39.5% |
| Household income (JPY) | ||
| 0–2 million | 6.3% | 6.3% |
| 2.01–4 million | 17.0% | 16.6% |
| 4.01–6 million | 20.8% | 21.6% |
| 6.01–8 million | 16.8% | 16.7% |
| 8.01–10 million | 10.5% | 10.7% |
| 10.01–12 million | 7.7% | 7.6% |
| 12.01+ million | 5.2% | 4.9% |
| Unknown | 15.7% | 15.5% |
| Car driving license holder | 91.2% | 91.2% |
| Experience of riding in AVs | 1.1% | 1.1% |
| Variable | Average | Min. | Max. |
|---|---|---|---|
| Cost (JPY) | 138.7 | 0 | 2256 |
| Total time (min) | 26.1 | 1 | 250 |
| In-vehicle time (min) | 22.5 | 1 | 240 |
| Distance (km) | 9.4 | 0.1 | 50 |
| Mode | Percentage | ||
| Rail | 15.9% | — | — |
| Bus | 2.9% | — | — |
| Car | 57.7% | — | — |
| Motorbike | 2.4% | — | — |
| Taxi | 0.5% | — | — |
| Bicycle | 9.0% | — | — |
| Walk | 11.6% | — | — |
| Purpose | |||
| Commuting | 23.0% | — | — |
| Business | 6.7% | — | — |
| Shopping | 26.8% | — | — |
| Social, entertainment, eating, and recreation | 9.8% | — | — |
| Other private purposes | 13.3% | — | — |
| Returning home | 20.3% | — | — |
| Explanatory Variable | Model 1: OL | Model 2: Panel Mixed OL | Model 3: OL | Model 4: Panel Mixed OL | ||||
|---|---|---|---|---|---|---|---|---|
| Coef. | t−stat | Coef. | t−stat | Coef. | t−stat | Coef. | t−stat | |
| Travel cost (10−2 JPY) | −0.017 | (−6.4) | −0.066 | (−6.9) | −0.017 | (−6.5) | −0.066 | (−7.5) |
| In−vehicle time (10−1 min) | −0.048 | (−3.0) | −0.129 | (−1.9) | −0.048 | (−3.0) | −0.129 | (−1.9) |
| Std. dev. | — | 0.513 | (6.4) | — | 0.511 | (6.5) | ||
| Other time (10−1 min) | −0.246 | (−7.9) | −0.375 | (−3.7) | −0.246 | (−7.9) | −0.376 | (−3.7) |
| Std. dev. | — | 0.766 | (3.9) | — | 0.767 | (4.0) | ||
| Derived VTTS | ||||||||
| In−vehicle time (JPY/min) | 28.1 | 19.6 | 28.1 | 19.5 | ||||
| Other time (JPY/min) | 144.4 | 56.8 | 144.5 | 56.9 | ||||
| Monitoring method (ref. = “onboard human”) | ||||||||
| “Remote” | −0.05 | (−0.8) | −0.10 | (−0.9) | — | — | ||
| “Remote system−based” | — | — | −0.05 | (−0.8) | −0.11 | (−1.0) | ||
| Recent trip (ref. = returning home and rail) | ||||||||
| Commuting | −0.12 | (−1.2) | 0.05 | (0.1) | −0.12 | (−1.2) | 0.05 | (0.2) |
| Business | −0.12 | (−0.8) | 0.42 | (0.6) | −0.12 | (−0.8) | 0.42 | (1.0) |
| Shopping | −0.04 | (−0.5) | 0.17 | (0.5) | −0.04 | (−0.5) | 0.17 | (0.6) |
| Social, entertainment, eating, and recreation | 0.14 | (1.2) | −0.19 | (−0.4) | 0.14 | (1.2) | −0.19 | (−0.5) |
| Other private purposes | −0.16 | (−1.4) | 0.10 | (0.3) | −0.16 | (−1.4) | 0.11 | (0.3) |
| Bus | 0.81 | (4.2) | 1.81 | (3.4) | 0.81 | (4.2) | 1.80 | (4.1) |
| Car | 0.15 | (1.5) | −0.07 | (−0.2) | 0.15 | (1.5) | −0.07 | (−0.3) |
| Taxi | 3.21 | (8.5) | 2.80 | (3.4) | 3.21 | (8.1) | 2.79 | (5.0) |
| Motorbike | −0.44 | (−1.9) | −1.82 | (−2.3) | −0.44 | (−2.0) | −1.82 | (−2.4) |
| Bicycle | −0.13 | (−0.9) | −0.86 | (−1.5) | −0.13 | (−0.9) | −0.87 | (−1.9) |
| Walk | −0.10 | (−0.8) | −0.72 | (−1.5) | −0.10 | (−0.8) | −0.73 | (−2.0) |
| Individual/HH attributea | ||||||||
| Age_25–34 | −0.13 | (−0.4) | −0.28 | (−0.2) | −0.13 | (−0.4) | −0.28 | (−0.6) |
| Age_35–44 | −0.39 | (−1.1) | −0.72 | (−0.6) | −0.39 | (−1.2) | −0.72 | (−1.5) |
| Age_45–54 | −0.45 | (−1.3) | −0.77 | (−0.6) | −0.45 | (−1.4) | −0.78 | (−1.7) |
| Age_55–64 | −0.36 | (−1.0) | −0.93 | (−0.7) | −0.36 | (−1.1) | −0.93 | (−2.1) |
| Age_65–74 | −0.26 | (−0.7) | −0.94 | (−0.7) | −0.26 | (−0.8) | −0.94 | (−2.2) |
| Female | −0.09 | (−1.2) | −0.35 | (−1.2) | −0.09 | (−1.2) | −0.34 | (−1.5) |
| Income_2–4 | 0.28 | (2.6) | 0.55 | (1.3) | 0.27 | (2.7) | 0.55 | (1.6) |
| Income_4–6 | 0.17 | (1.8) | −0.01 | (−0.0) | 0.17 | (1.8) | −0.01 | (−0.0) |
| Income_6–8 | 0.02 | (0.2) | −0.11 | (−0.3) | 0.02 | (0.2) | −0.11 | (−0.3) |
| Income_8–10 | 0.22 | (1.8) | 0.47 | (0.9) | 0.22 | (1.9) | 0.47 | (1.2) |
| Income_10–12 | 0.29 | (2.1) | 0.35 | (0.7) | 0.28 | (2.1) | 0.35 | (0.8) |
| Income_12+ | 0.33 | (2.1) | 0.53 | (1.1) | 0.33 | (2.2) | 0.52 | (1.1) |
| Car license holder | −0.09 | (−0.8) | −0.50 | (−1.2) | −0.09 | (−0.8) | −0.50 | (−1.5) |
| Perception (P), experience (E), attitude (A)b | ||||||||
| P_trans. tech._medium | 0.21 | (2.9) | 0.44 | (1.8) | 0.21 | (2.9) | 0.44 | (1.9) |
| P_trans. tech._high | 0.09 | (0.6) | −0.19 | (−0.3) | 0.09 | (0.7) | −0.19 | (−0.5) |
| E_AV ride | 0.59 | (2.0) | 0.48 | (0.4) | 0.59 | (2.1) | 0.49 | (0.5) |
| E_ride−sharing_medium | 0.40 | (2.6) | 1.60 | (4.2) | 0.40 | (2.7) | 1.61 | (4.3) |
| E_ride−sharing_high | 0.33 | (1.1) | −0.09 | (−0.1) | 0.33 | (1.1) | −0.11 | (−0.1) |
| A_risk averse_medium | −0.35 | (−4.3) | −0.50 | (−1.8) | −0.35 | (−4.3) | −0.50 | (−1.9) |
| A_risk averse_high | −0.64 | (−7.1) | −0.43 | (−1.4) | −0.64 | (−7.1) | −0.43 | (−1.4) |
| A_like new_medium | 0.20 | (−2.4) | 0.25 | (−0.7) | 0.20 | (−2.4) | 0.26 | (−1.0) |
| A_like new_high | 0.82 | (−6.7) | 1.23 | (−2.1) | 0.82 | (−6.8) | 1.24 | (−3.2) |
| Threshold | ||||||||
| −3.52 | (−8.1) | −3.26 | (−1.6) | −3.54 | (−8.9) | −3.28 | (−13.9) | |
| 0.56 | (8.4) | −0.15 | (−0.9) | 0.56 | (8.4) | −0.16 | (−1.0) | |
| Std. dev. | — | 1.05 | (11.5) | — | 1.05 | (12.2) | ||
| 0.73 | (26.6) | 0.57 | (6.4) | 0.73 | (26.6) | 0.57 | (6.3) | |
| Std. dev. | — | 1.64 | (14.6) | — | 1.64 | (14.6) | ||
| No. of obs. | 4989 | 4989 | 4989 | 4989 | ||||
| Log likelihood at convergence | −3924 | −2877 | −3924 | −2877 | ||||
| Adjusted McFadden’s R2 | 0.167 | 0.303 | 0.170 | 0.303 | ||||
| Specification of Monitoring Variable | Results of Model Estimation: Effect of Monitoring Variable | |
|---|---|---|
| Only “Remote” (human + system-based) is used. | Random coefficient | Not significant at the 10% level |
| Not random | Not significant at the 10% level | |
| Only “Remote system-based” is used. | Random coefficient | Std. dev. of the coefficient is significant at the 10% level |
| Not random | Not significant at the 10% level | |
| “Remote human-based” and “remote system-based” are used. | Random coefficient | Not significant at the 10% level |
| Not random | Not significant at the 10% level | |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Abe, R.; Kita, Y.; Fukuda, D. An Experimental Approach to Understanding the Impacts of Monitoring Methods on Use Intentions for Autonomous Vehicle Services: Survey Evidence from Japan. Sustainability 2020, 12, 2157. https://doi.org/10.3390/su12062157
Abe R, Kita Y, Fukuda D. An Experimental Approach to Understanding the Impacts of Monitoring Methods on Use Intentions for Autonomous Vehicle Services: Survey Evidence from Japan. Sustainability. 2020; 12(6):2157. https://doi.org/10.3390/su12062157
Chicago/Turabian StyleAbe, Ryosuke, Yusuke Kita, and Daisuke Fukuda. 2020. "An Experimental Approach to Understanding the Impacts of Monitoring Methods on Use Intentions for Autonomous Vehicle Services: Survey Evidence from Japan" Sustainability 12, no. 6: 2157. https://doi.org/10.3390/su12062157