1. Introduction
Collecting visual observations in underwater environments is a difficult task and a technological challenge [
1]. Refraction, non-uniform lighting and shadows, light scattering and absorption: all reduce our ability to collect and interpret quality visual information [
1,
2,
3]. Small suspended particles in water create a turbid environment that strongly increases light scattering and enhances the absorption probability of photons [
3]. When the light source is the sun, this process effectively decreases the amount of ambient light present at any depth and limits the range of visual observations. With artificial illumination, the range for underwater vision can be extended (for example we can move deeper) but at the cost of degrading image contrast due to (forward- and back-) scattering generated by suspended particles. The situation is similar to driving a car in foggy conditions with the headlights on: increasing the power of illumination does not improve the visibility, as the backscattering increases proportionally. Image contrast is also lowered with shorter visual range as the light attenuation will reduce the illumination of distant targets. These factors remain the outstanding challenges in underwater imaging and limit the application of visual observations in many sectors [
1,
2,
4].
Various optical and acoustic imaging systems for mitigating or solving these problems are under constant development and refinement. However, a general technological solution for high-quality images in all seawater conditions remains elusive. While acoustic methods offer the undoubted advantage to cover larger volumes of water at low resolution, optical systems are needed for habitat mapping and monitoring, as their richer data accommodates more accessible analyses, for instance in terms of species identification, enumeration, and distributions. High-definition camera sensors, improved artificial illumination systems, LIDAR sensors for bathymetry, range-gated imaging systems, and holography are all aspects in which underwater vision technology has greatly advanced in the recent years to improve coastal and open ocean habitat mapping [
4,
5,
6,
7,
8,
9]. Light source is often considered a critical element in these applications, and imaging systems are distinguished as passive when they rely on natural lighting, or active when artificial illumination is used. For more reliable operations at different depths and water conditions, artificial lighting is generally provided, and with the development of LED technology, several affordable solutions are becoming available for routine monitoring activities [
4,
5,
9]. More sophisticated—but also more expensive—systems make use of laser lights to take advantage of collimated, narrow and monochromatic beams, allowing sensible reductions in scattering volumes [
10,
11].
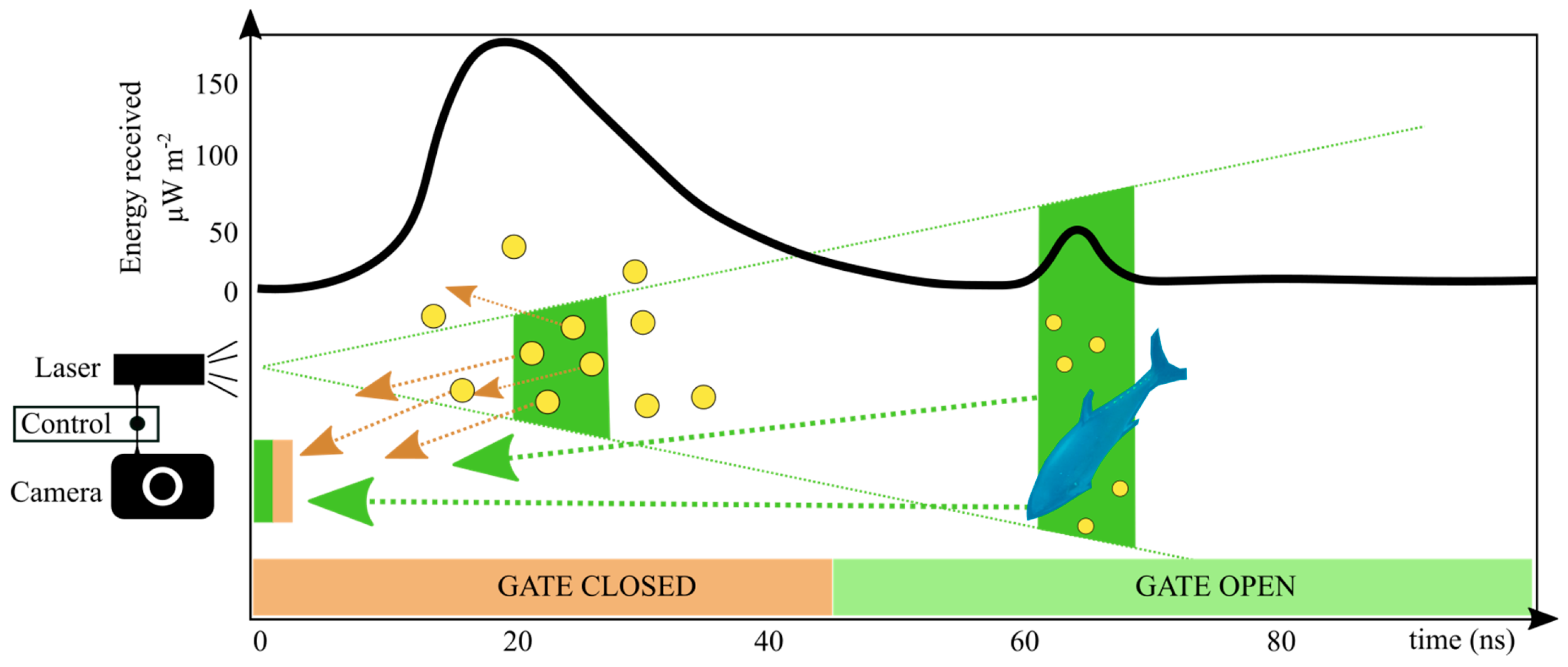
Lasers can be used as continuous light sources or as strobed (pulsed) lights as in-line scanners (LIDARs) and all range-gated systems [
2,
10,
12,
13]. Range-gated imaging systems are based on a relatively simple concept in which the camera shutter is synchronised with the light source emitting nanosecond length pulses and only opens for a time window around the instant when the signal of the illuminated object of interest reaches the camera (
Figure 1). These systems can then effectively filter out forward- and back-scattering (except that within the gated time), improving visual range and augmenting image contrast [
13,
14]. Additionally, they can measure the time of flight (ToF) of the pulsed laser sheets, providing estimates of the distance to objects and enabling three-dimensional reconstruction of object size. The shorter the illumination pulse and image sensor gate, the finer the possible depth resolution and the more efficient the rejection of spurious backscattered light. However, notwithstanding the several advantages offered by range-gated systems with respect to other cameras, they are still limited in their use in ocean observations, since they have generally been more expensive and complex to operate, and have a limited resolution and frame-rate [
13,
14,
15,
16,
17].
In this paper, we present the UTOFIA camera, an Underwater Time-Of-Flight Imaging Acquisition system capable to overcome some of present day limitations in the use of range-gated systems in oceanographic exploration. The UTOFIA consortium was created in 2015 within the European Commission Horizon 2020 framework, bringing together experts in imaging, lasers, optics, ocean science, and marine hardware. The consortium has developed a new underwater range-gated camera system which can capture high-contrast images and 3D information in a single compact video camera platform. Improved capabilities for underwater imaging is recognized as an important technological advance in the ocean economy, helping to address both environmental challenges in the sustainable use of ocean resources, and ocean related economic activities, by improving surveillance, inspection and mapping operations [
18].
2. Methods
2.1. UTOFIA System
UTOFIA is an active imaging system providing 2D and 3D images covering a volume limited by the field of view and the selected distance-range interval (
Figure 2,
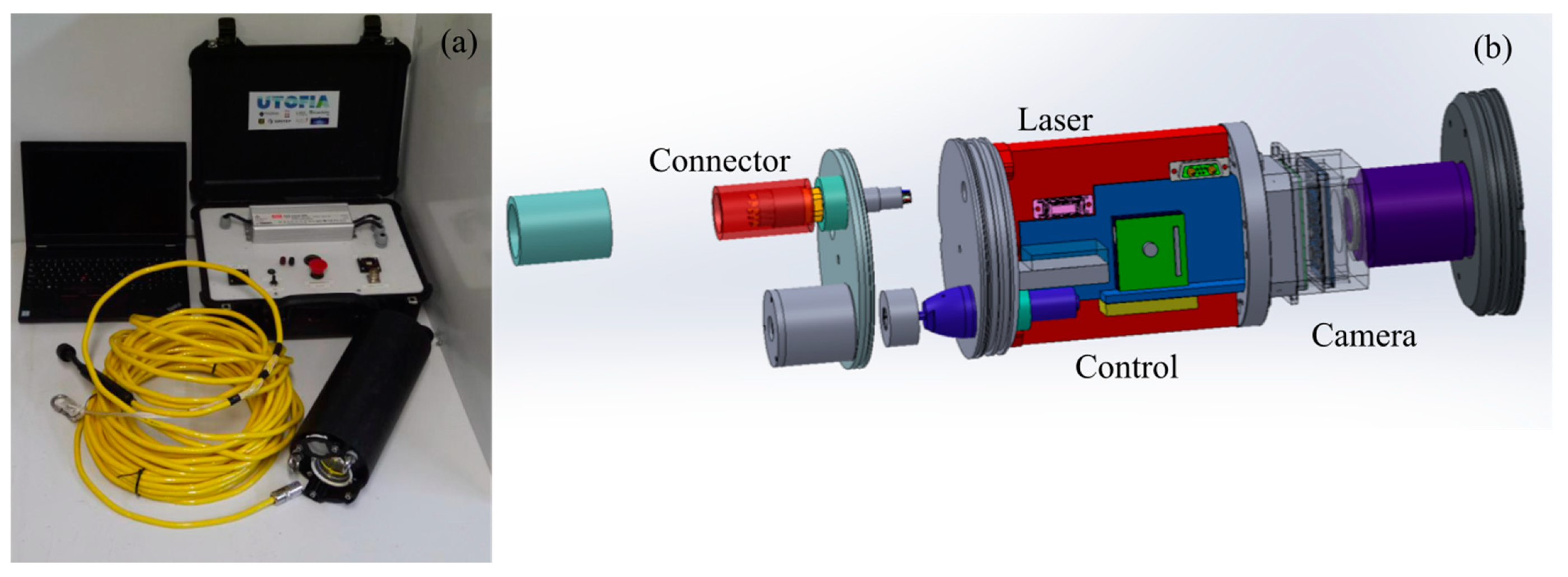
Table 1). A range from 1 to 9 m could typically be scanned in less than 1/10 s. The volume is scanned by changing the laser firing relative to the camera shutter, and three-dimensional information is extracted by processing the time scanned series of images. The system is compact and weighs 9 kg in air and less than 2 kg in water. It is composed of an integrated camera sensor and laser illumination system within a sealed and pressure-resistant cylindrical casing, which also houses the drivers for the camera and the laser, as well as the electronics needed to let these parts talk with each other; a topside command box and a cable provide power and allow data transmission (
Figure 2a). The housing is composed of four parts (
Figure 2b): a cylindrical shell (370 mm in length, 150 mm in diameter) made of Polyoxymethylene, the front flange (aluminium) which holds the camera and laser windows, the middle flange (aluminium) which holds the laser module, and the back flange (aluminium) which holds external connections and temperature control system. The housing has been designed to sustain 300 m water depth (30 bars). It has been tested and proven pressure resistant in a hyperbaric chamber up to 25 bars.
The topside command box includes a power supply, an Ethernet switch, a communication module, a voltmeter and an on/off switch. The power supply is adjustable with an internal potentiometer. The system’s power requirement is 200 W, delivered by 22-28 V DC. The voltage can be accommodated to compensate for voltage drop along the cable. The topside box includes a transformer for a standard 220 V power supply. Standard data communication is via a Gbit Ethernet or an optional 100 Mbit with reduced resolution and/or frame rate. A hybrid GigE RS485 70 m long umbilical can connect from the camera unit via a wet-mateable MCBH-16 connector to the topside unit, or via a 1.2 m pig-tail with a connector to an ROV or other powered platforms.
2.2. Laser Illuminator
A novel, frequency doubled laser system has been designed, manufactured and tested specifically to be used as scene illuminator in the UTOFIA project [
19]. The laser is based on a miniaturised version of proprietary Q-switch technology to produce a dedicated high-power illumination source occupying a volume of less than 1.2 L. This new conceptual design consists of a frequency doubled, actively Q-switched Nd:YVO
4 laser system emitting linearly polarized light pulses at 532nm, featuring a diode-pumped Master Oscillator and Power Amplifier architecture (MOPA) [
20,
21]. The energy, pulse duration and repetition rate are respectively >2mJ @532nm, <2ns, up to 1kHz. The laser is supplied with a diverging lens and with a set of diffusors at the exit to give a uniform intensity distribution within the field of illumination; the final beam’s divergence is approximately 6 degrees.
Efficient cooling of active laser and camera parts has allowed the system to operate at water temperatures from 0 to 20 °C without temperature stability problems. In the case of water temperatures close to 30°C, it is possible that the temperature regulation system is not sufficient to allow continuous operation at maximum power rating. Hence, for continuous operation at higher temperatures, an appropriate de-rating procedure is used either by reducing energy (i.e., 80% of maximum energy) or decreasing repetition rate (i.e., 400 to 800 Hz). A new, more sophisticated cooling system, capable of full power operation at maximum water temperature, is currently under test and will be incorporated into future UTOFIA systems.
2.3. Camera Sensors
The UTOFIA camera platform uses a monochrome CMOS time-of-flight (ToF) image sensor. The sensor has a maximum resolution of 1280 × 1024 and a frame rate which is dependent on the region of interest. At full resolution, the sensor provides a frame-rate of 400 Hz, which increases to 1000 Hz at 0.5 Mpixels. The sensor firmware includes an on-board sequencer which exposes control over the relative timing between the firing of the laser pulse and the opening of the camera shutter in increments of 1.67 ns. If the camera operates at 1000Hz and a 10Hz display frame-rate, 100 exposures are available to construct a range-gated sweep. Typically, we organize these exposures such that 25 ranges are sampled with an inter-range distance of 36 cm and an average 4 exposures at each range to improve the signal to noise. The fast shutter opens in approximately 15 ns.
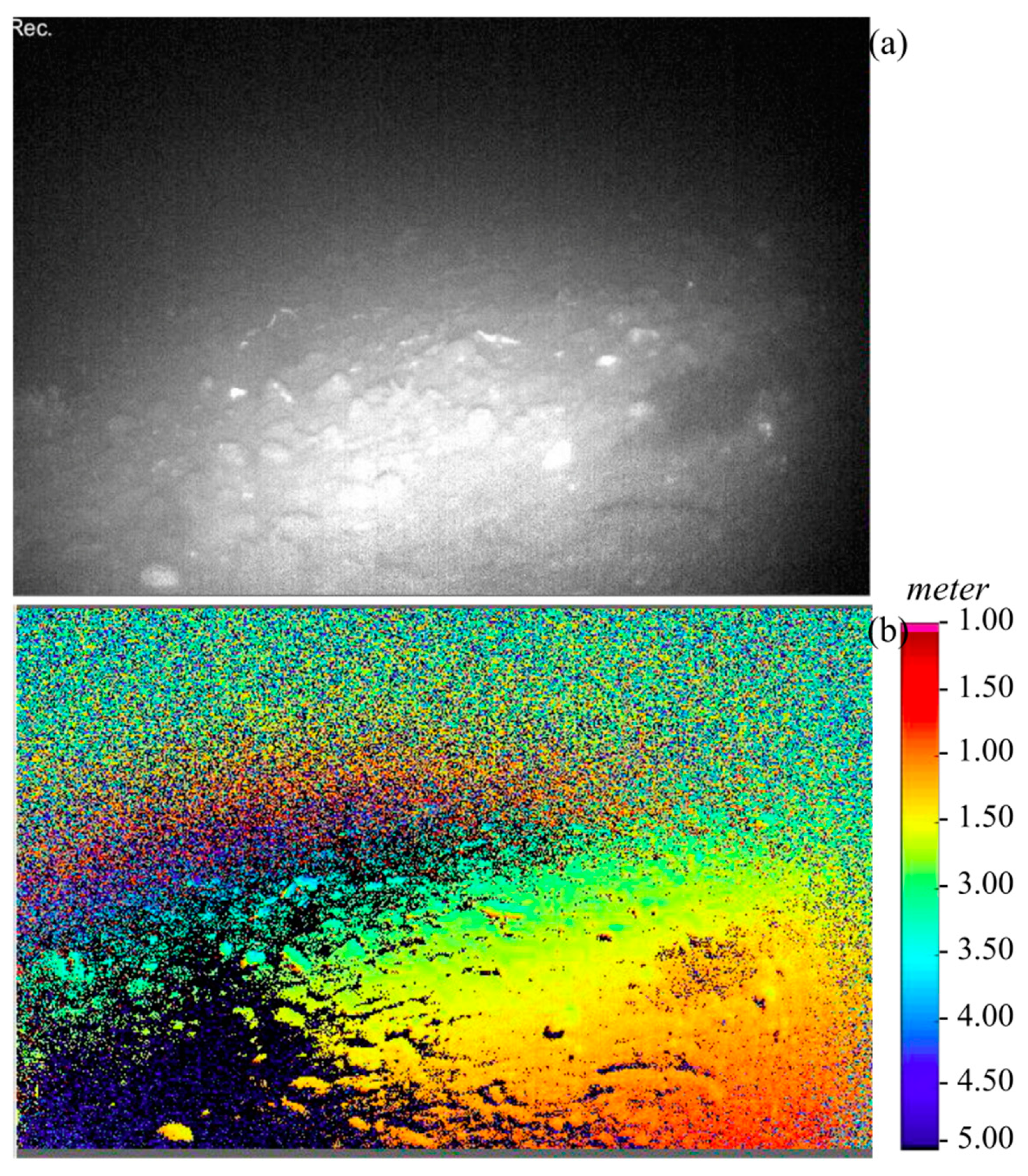
To access the dual benefits of high-contrast images and 3D information, an adaptive 3D reconstruction algorithm has been developed to identify both the object distance as well as the range of optimal contrast on a per-pixel basis [
22]. A final image is then reconstructed consisting of the high-contrast grey scale overlaid with the 3D information. In order to achieve this output at video rates, very efficient data processing and filtering is carried out on an internal FPGA within the operation.
2.4. Deployment and Operations
The system has been tested at sea across a broad range of weather, water and illumination conditions. In these sea trials, the system has been deployed using different platforms, ranging from simple poles, wires and bottom mounting frames, to more sophisticated vehicles such as remote operated vehicles (ROVs), unmanned surface vehicles (USVs) and benthic sledges. This versatility of deployment platforms takes advantage of the compact and relatively small dimension of the device.
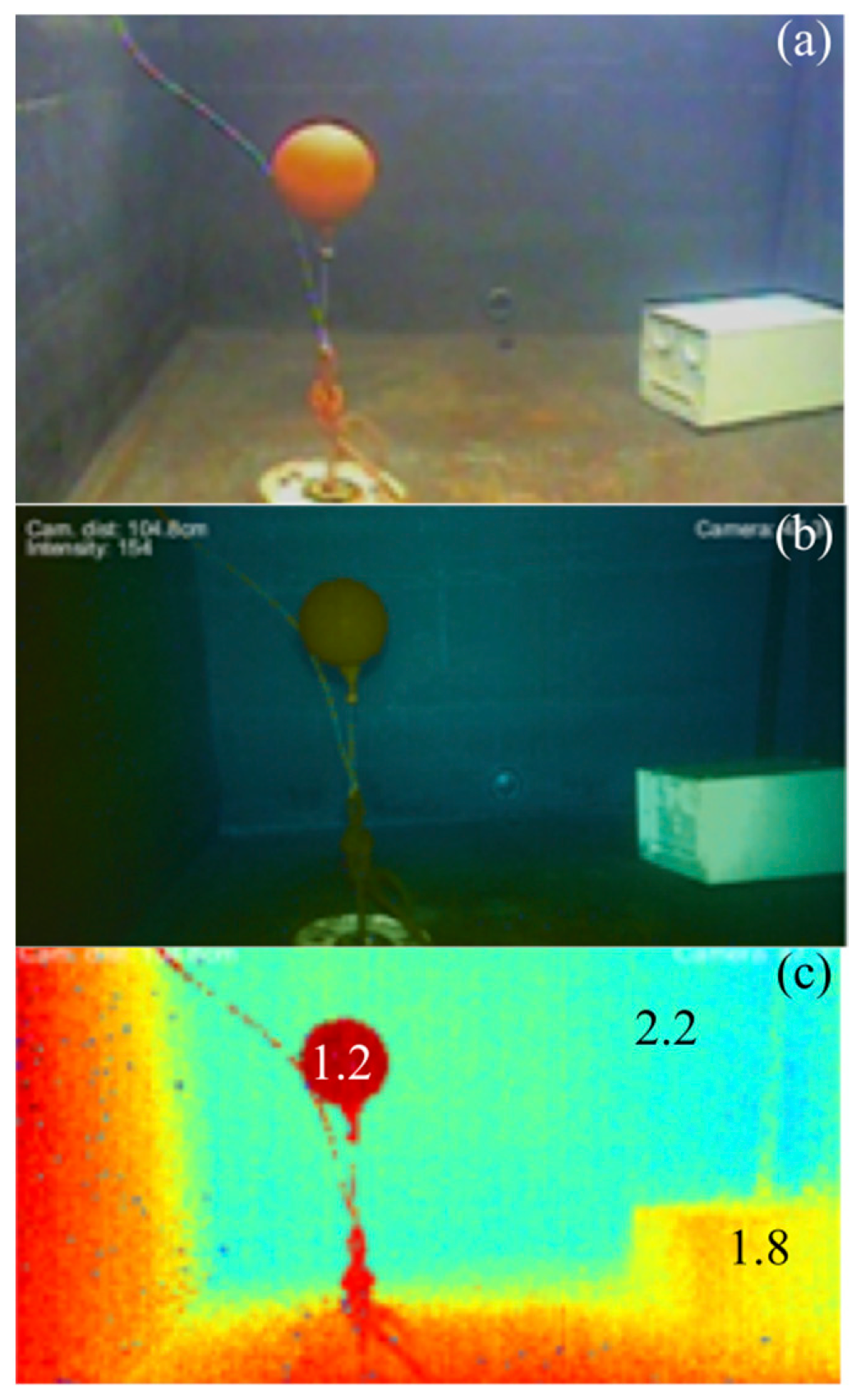
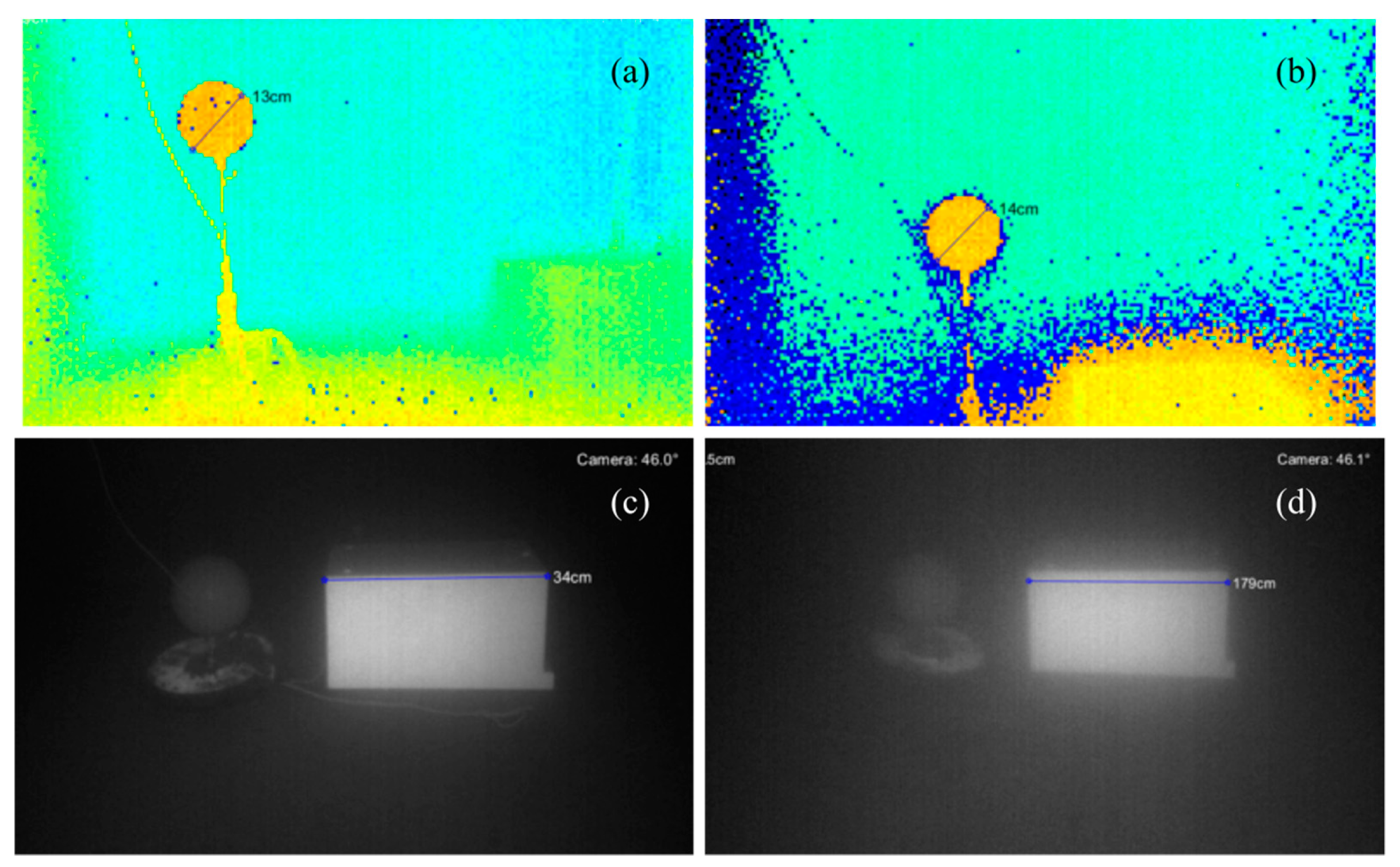
During the development phase, the system has been also extensively tested in laboratory conditions. To assess the performances at varying levels of water turbidity and different angles of view of the imaging system, we used UTOFIA in a large tank to collect images of standard targets: a buoy of size 12.7 cm (5 inches) and a white plate (34 cm × 23 cm) (
Figure 3a). Turbidity has been manipulated by adding clay particles (< 0.1 mm) to the water. At a concentration of 0.1 kg m
−3, the visibility in the tank was below 2 m. Attenuation length (λ) in the tank has been measured and performances of the system have been assessed in measuring the size of the different elements and in evaluating image contrast and blurring effects.
2.5. Data Processing
A software package is supplied with the system and consists of a graphical user interface (GUI) and a C# API. The GUI has been developed in MATLAB and it uses a C# API to connect and interface with the camera. The C# API is also available for the customer and can be used to develop user specific automated measurements. Through the GUI the operator is able to set operation parameters like scan range and field of view. There are several operation modes available. The user can find the best settings for their application by experimenting with the different options. Through the GUI, acquired range-gated data can be visualised, stored and processed. Length measurements can be done directly by manually selecting reference points on the screen. The GUI can also be used to re-play and post-process stored data. GUI version 1.0 (named "UTOFIA player") is available for download on the UTOFIA web site [
23].
4. Discussion
4.1. Surveying the Ocean
Surveying the ocean is a prerequisite for the safe and sustainable use of marine resources [
24]. Traditional fishing activities, the rapid development of underwater renewable energy plants, the expansion of fish farms and the increasing requirements for surveying ageing infrastructures (e.g., dams, water reservoirs, harbour facilities); all call for rapid technological advances in underwater observation technologies. For example, in fisheries and aquaculture, there is a need of high quality and real-time data on, namely, fish abundances and size, as well as identification of marine habitat status, to achieve the sustainable management of these resources [
25,
26,
27]. Food supply from the ocean now contribute more than 15% of the overall amount of animal protein consumed worldwide [
28], hence it is essential for human health and wellbeing that these resources are managed at sustainable levels.
However, observations in underwater environment are technologically challenging given the extreme visibility conditions. At large distances, sonar is the predominant technology for observing the subsurface oceans, but while it can be applied at close range, its restricted resolution and high cost strongly limits its usefulness. Video cameras are the primary sensor technology for detailed underwater observations due to their lower cost and higher resolution. They are especially valuable when direct visualization is required, for example for species identification, habitat mapping, inspecting subsurface structures. The major drawback of any underwater optical technique such as conventional video cameras is their severe limitation in turbid waters, where light scattering reduces the range and quality of image data.
The UTOFIA system presented in this paper can overcome the limitations created by scattering, by introducing cost-efficient range-gated imaging for underwater applications. Combining pulsed laser light and a range-gated camera system, the UTOFIA can perform observations in turbid environments, improving image contrast and quality with respect to standard underwater cameras. Additionally, the system can provide three-dimensional information of underwater objects to augment the images with data on size and to improve performances of computer vision algorithm applied to those images. Applications such as those presented here can help different maritime sectors to introduce cost effective solutions for monitoring, inspection and surveillance.
The main advantage of the UTOFIA system compared to competing systems such as the Laser
Underwater Camera
Image Enhancer (LUCIE [
14]) is that it is a cost-effective high-resolution integrated system. It uses the range-gating concept for high-precision 3D acquisition and the 3D data is used to automatic determine the optimal range for contrast enhanced imaging. In comparison, the LUCIE system [
14] is only capable of performing contrast enhancing range gating and requires an expensive sonar for automatic guiding of the ideal gating distance [
29]. However, LUCIE uses an expensive image intensifier in combination with a CCD camera to makes it more light sensitive compared to UTOFIA. The result is that it can detect objects at further distances than UTOFIA (approximately 6x the attenuation length for LUCIE versus 5x for UTOFIA at
).
4.2. Improving Management of Marine Resources
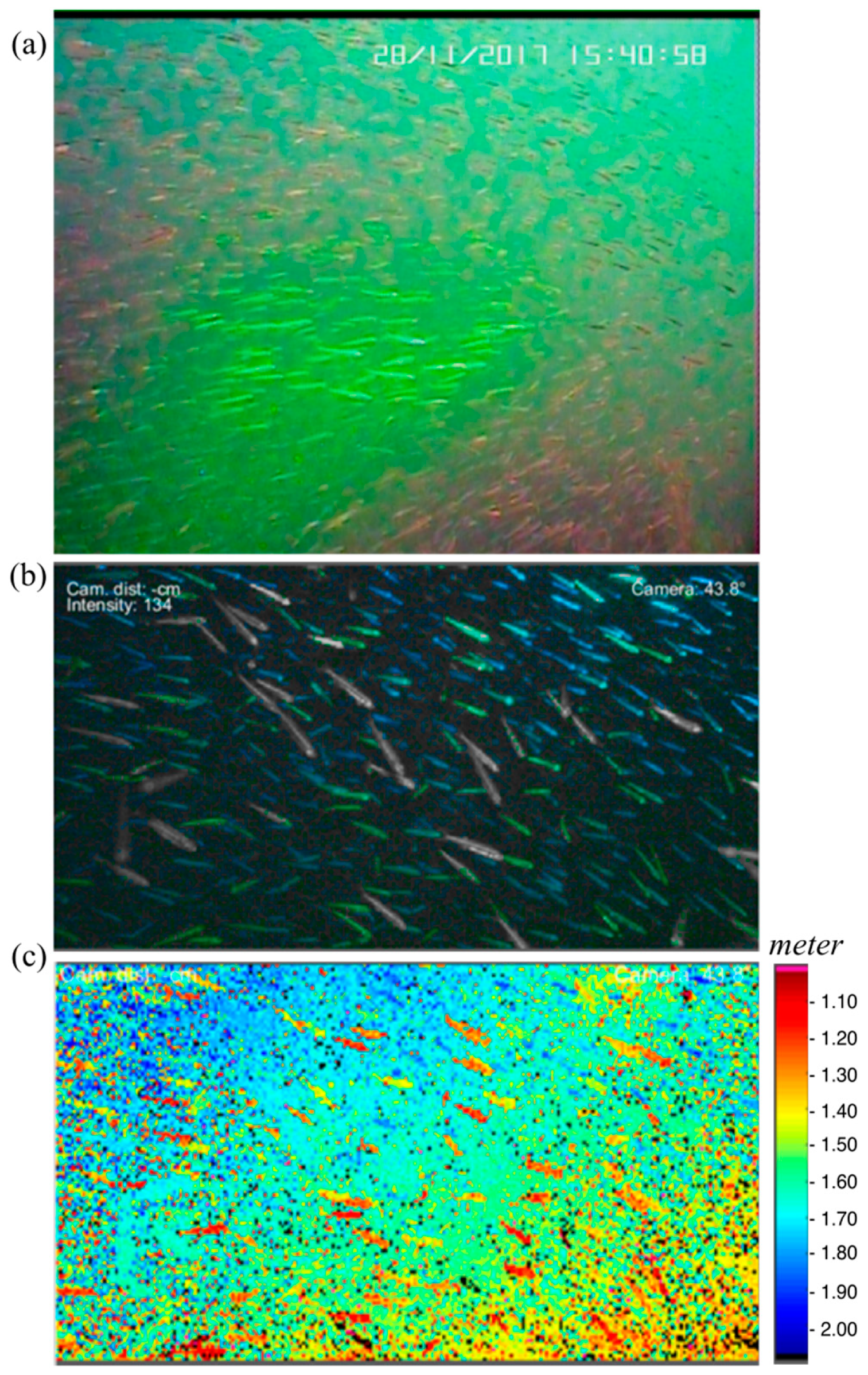
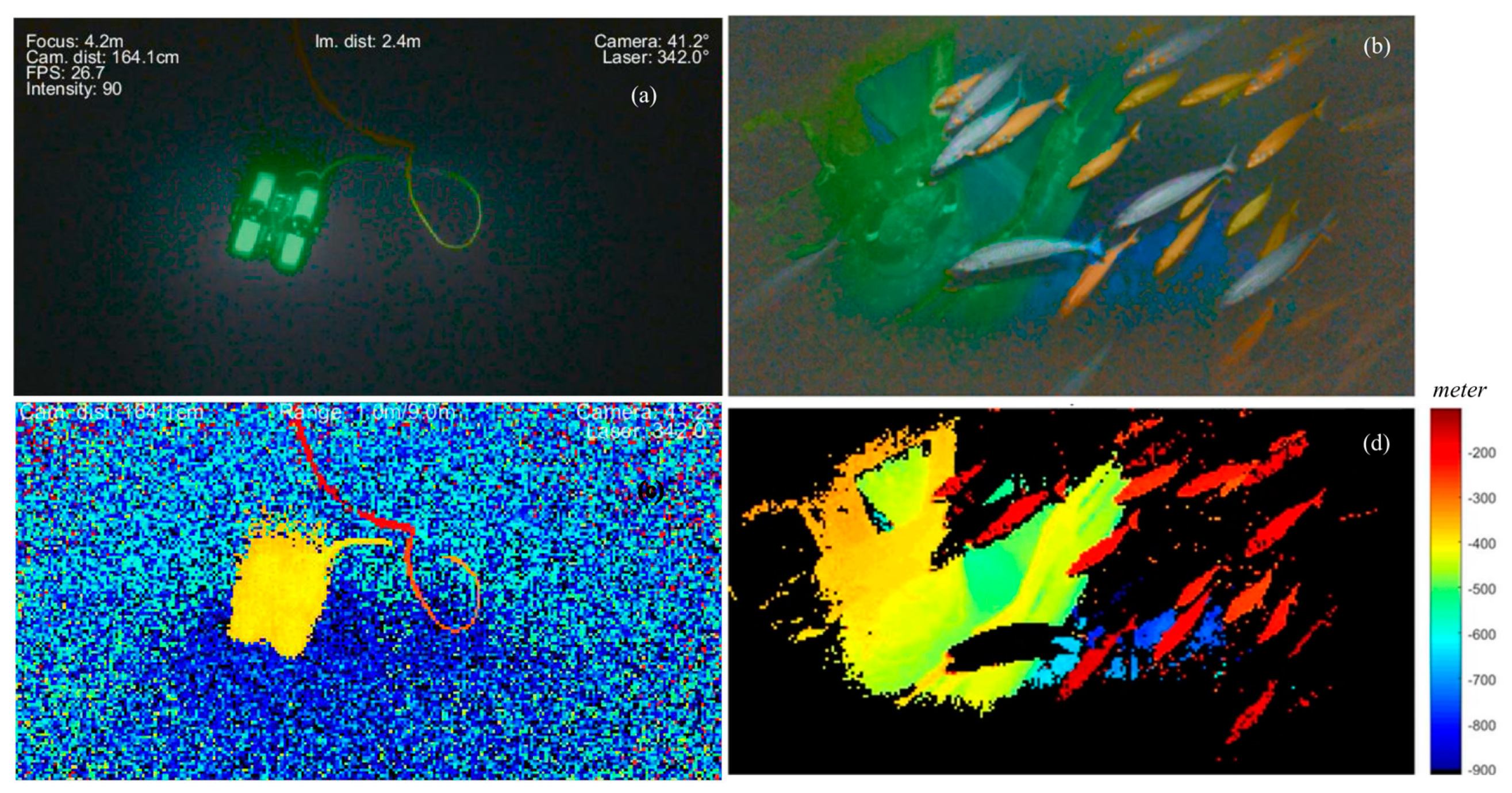
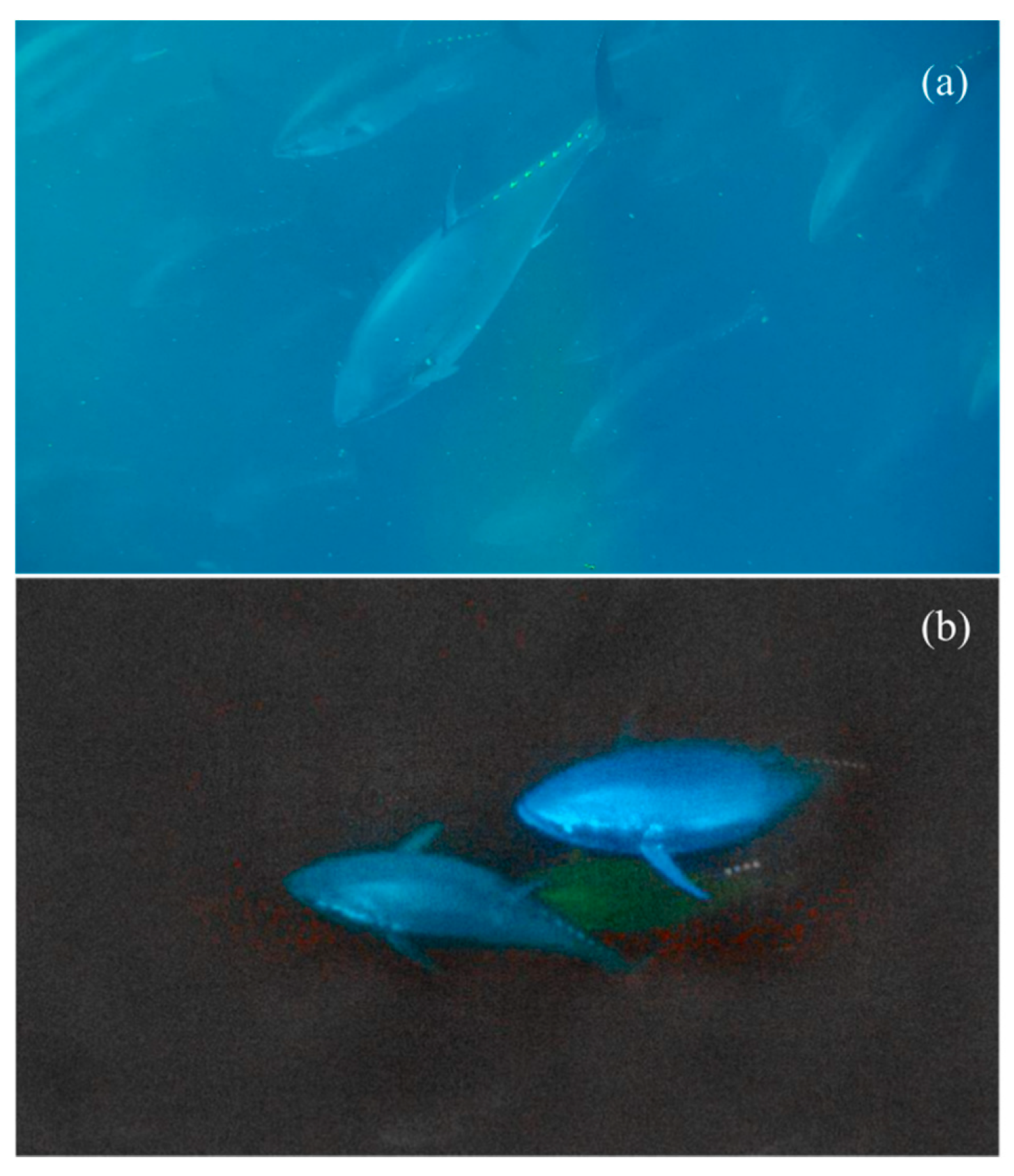
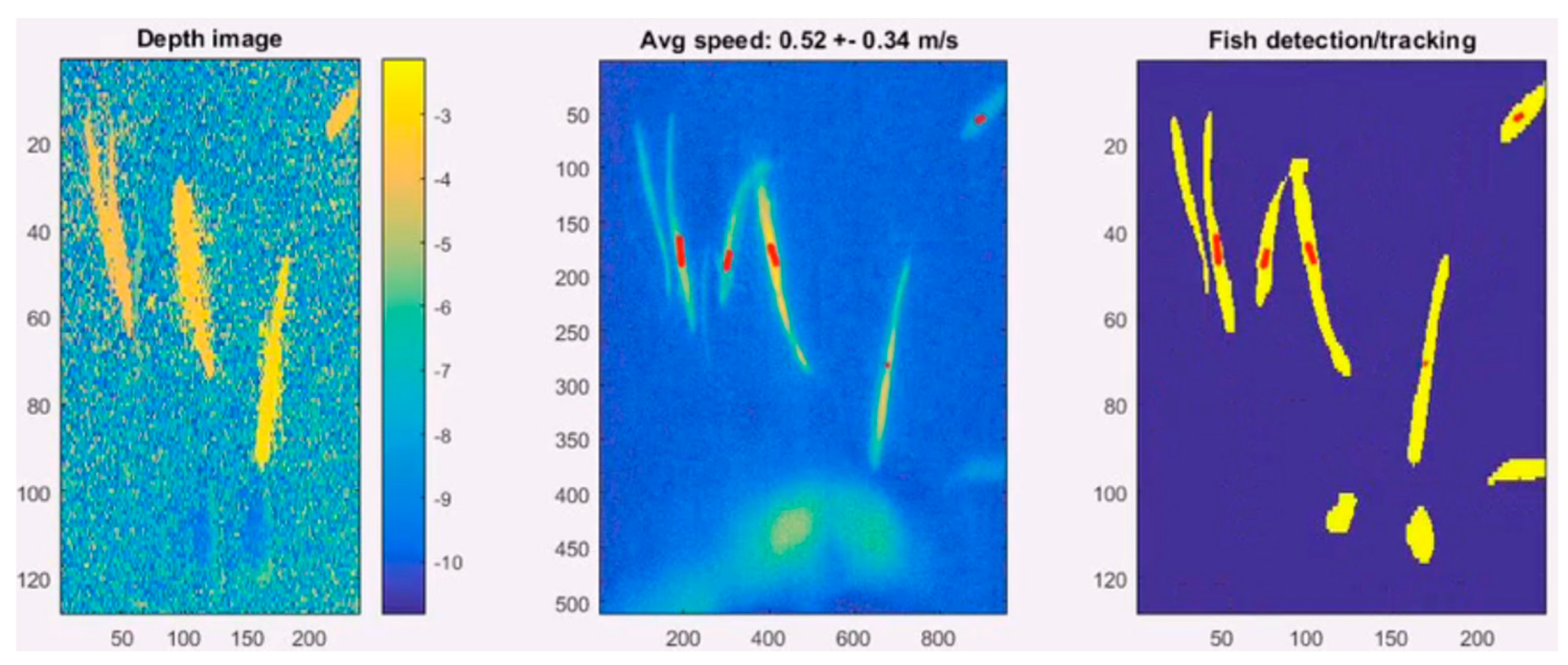
Marine resource management depends not only on counting species, but also assessing size and abundance. The ability of the UTOFIA system to capture dynamic scenes has been tested in sea trials and laboratory setups. In several laboratory trials, fish have been released in a tank and the UTOFIA system has been used to measure the distance to each fish. The live 3D images captured at 10 Hz allow for immediate visualization of the fish in a 3D volume together with an intensity image; it also allows for hundreds of fish to be measured in a few minutes. This has great potential application to optimize the management of aquaculture productions, reducing unnecessary feed waste and observing growing conditions in the cages.
Surveying the ocean bottom, removing marine litter from the seabed or evaluating impact of human activities on natural habitats typically require the extensive use of underwater vehicles (AUVs, ROVs, etc.). The limited imaging range of conventional video cameras in low visibility waters requires that these platforms be deployed very close to the bottom during the survey, thus observing just a small part of the seabed. By extending the imaging range, UTOFIA can allow such operations to become safer and faster. Given the compact and relatively small size of the system, it is designed to be deployed on several autonomous platforms. Tests on different ROVs have been performed allowing safer navigation (e.g., avoid bottom collisions) and larger image footprint during data collection at the bottom. Additionally, given the improved image contrast and augmented information on sizes, automatic classification of habitat feature can be optimized using the UTOFIA images.
4.3. Advance Marine Science
Traditionally, the use of visualization systems within marine sciences span from the smallest individuals (zooplankton) to fish and mammals, as well as mapping and monitoring the physical marine habitat. Applications are for the large part used within the field of behavioral studies, ecosystem monitoring, direct observations of subsea processes, mapping sea beds, and surveying habitats [
30,
31,
32]. More elaborate experiments seek to quantify fish behavior (e.g., swimming speed, schooling, feeding) both in the field and under controlled conditions as functions of environmental conditions (e.g., light levels, turbulence, current speed, turbidity). Observations of these phenomena at sea are extremely challenging given the highly dynamic environment and poor visibility conditions underwater. The UTOFIA system demonstrated the capacity to determine the size of organisms and how they move relative to each other; this can open ways of better understanding complex processes such as school formation or social structures in fish groups. The ability to follow individual fish and determine their swimming characteristics can also allow to study interactions between fish and underwater structures such as reef, harbor constructions or offshore windmill installations. The UTOFIA might become a new asset of the coastal ocean observation systems [
33].
5. Conclusions
UTOFIA is a compact underwater active imaging system with integrated laser illumination and range-gated technology, used to provide visual images and high-resolution 3D data. The range-gated imaging technology reduces the backscattering effects from suspended matter and improve image quality and contrast. Three dimensional capabilities enable the accurate size measurement of underwater objects in the field of view of the camera. The unique capabilities of UTOFIA make it suitable for a broad range of professional, commercial and industrial use in underwater operations, providing a number of new tools for augmented observations. These capabilities of the system can be used in marine science and in aquaculture, but also contribute with new opportunities across a broad range of maritime activities from fisheries to off-shore industry. The LIDAR technology used in UTOFIA also has applications beyond subsea usage, and in the future, we will explore the possibilities to deploy the system for space rendezvous and docking applications.

 ,
, 










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}