
How I Met Your V2X Sensor Data: Analysis of Projection-Based Light Field Visualization for Vehicle-to-Everything Communication Protocols and Use Cases


Abstract
:1. Introduction
- —
- There is an abundance of V2X sensor data.
- —
- Automotive technologies are advanced enough to benefit from V2X use cases.
- —
- Non-autonomous driving and non-remote driving are still dominant.
- —
- Light field visualization can already be adapted to in-vehicle usage contexts.
- —
- There is a lack of V2X-based light field solutions.
- —
- The latency of V2X data transfer is sufficiently low.
- —
- Comprehensive technological review of light field and V2X communication.
- —
- A set of recommendations for design and implementation.
- —
- Extensive discussion and implication analysis.
- —
- Exploration of utilization based on standardized protocols.
- —
- Use-case-specific considerations.
- —
- The driver does not need to divert attention from the traffic.
- —
- Light field visualization does not require viewing devices.
- —
- Light field technology enables direction-aware visualization.
- —
- Low-latency warnings support traffic safety.
- —
- V2X use cases support traffic efficiency in general.
- —
- Visualization of direction–selective contents.
- —
- Miscellaneous usage potentials for autonomous vehicles.
2. V2X Protocols and Use Cases
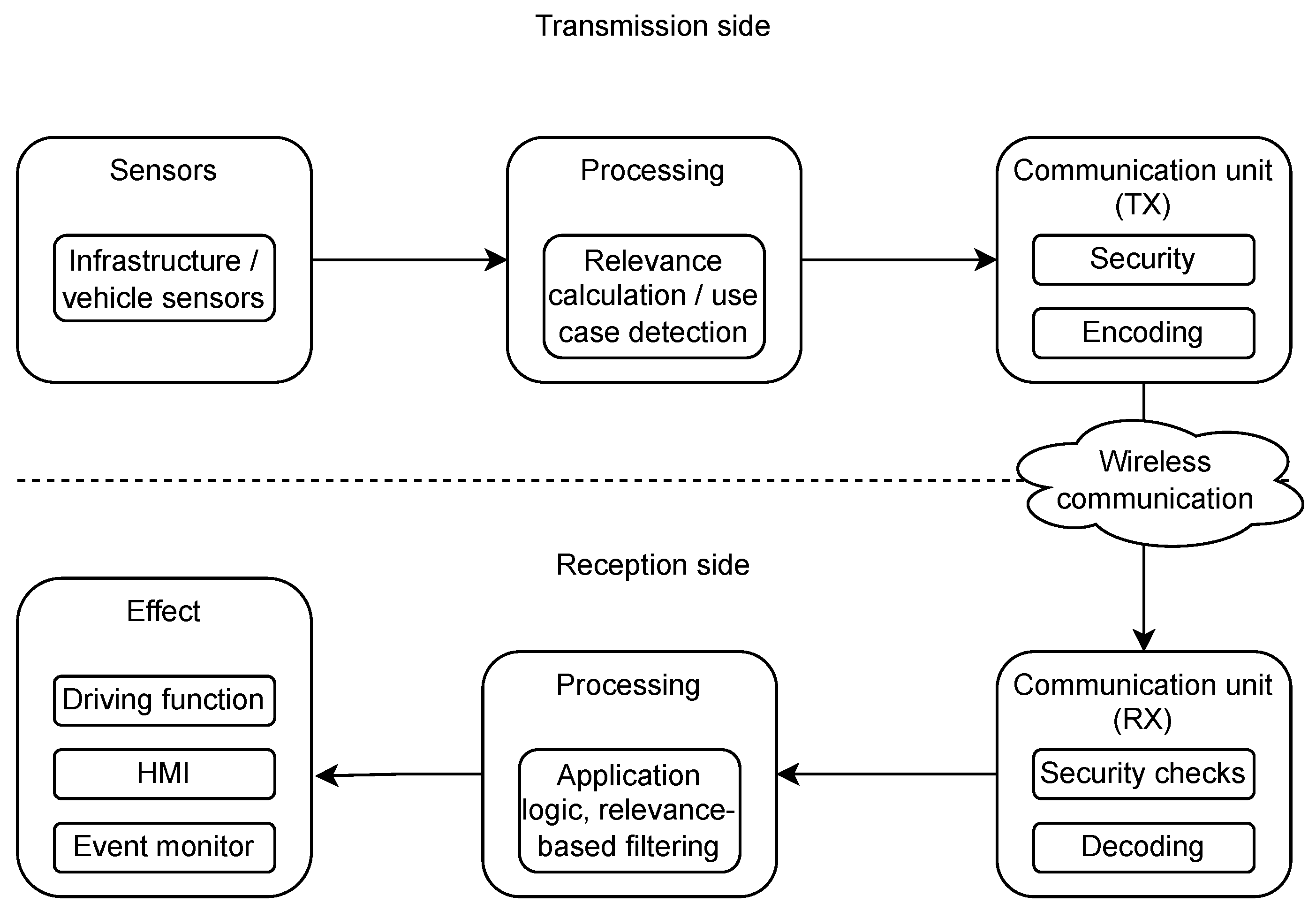
2.1. General Overview of Operation
2.2. Sensor Data
2.2.1. Vehicular Sensors
2.2.2. Infrastructure Sensors
2.3. V2X Protocols for Cooperative Perception and Information Sharing
2.4. Relevant V2X Use Cases
2.4.1. In-Vehicle Signage (IVS)
2.4.2. Hazardous Locations Notification (HLN)
2.4.3. Road Works Warning (RWW)
2.4.4. Signalized Intersections (SI)
2.4.5. V2V-Specific Use Cases
3. Projection-Based Light Field Visualization Technology
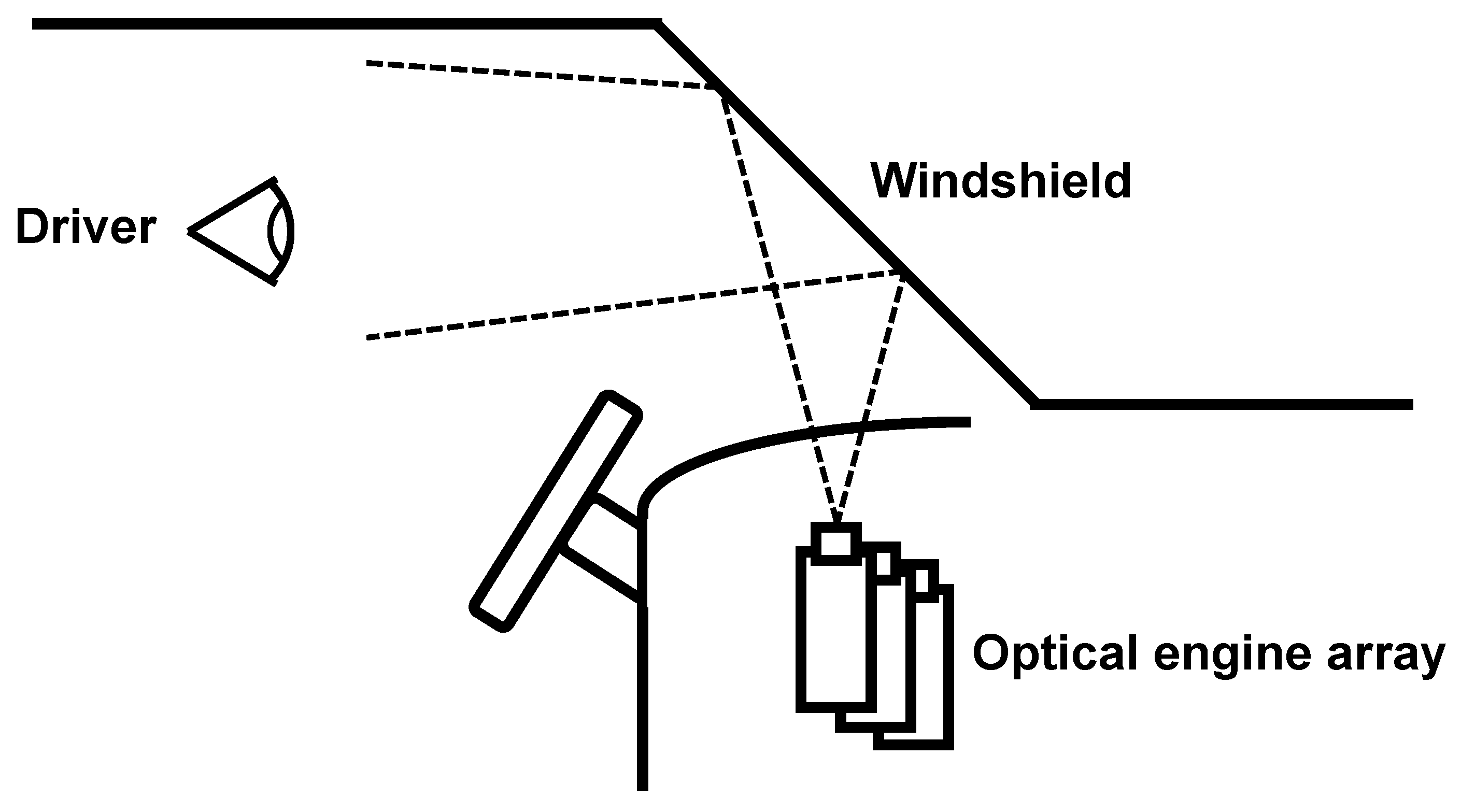
3.1. Concepts and Principles
3.2. General Overview of Operation
3.3. Key Performance Indicators
3.4. Limitations and Challenges
3.5. Recent Research Efforts
3.6. Use Cases
Automotive Use Cases
4. Recommendations for V2X Information Visualization
5. Discussion and Implications
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| ABS | Anti-lock Braking System |
| ADAS | Advanced Driver Assistance System |
| API | Application Programming Interface |
| AR | Augmented Reality |
| AUV | Autonomous Underwater Vehicle |
| ASR | Anti-Slip Regulation |
| CA | Cooperative Awareness |
| CAM | Cooperative Awareness Message |
| CAV | Connected and Autonomous Vehicles |
| C-ITS | Cooperative Intelligent Transportation System |
| CP | Cooperative Perception |
| CPS | Cooperative Perception Service |
| DDS | Distributed Display System |
| DEN | Decentralized Environmental Notification |
| DENM | Decentralized Environmental Notification Message |
| DIS | Driver Information Systems |
| ECU | Electronic Control Unit |
| ESP | Electronic Stability Control |
| FOV | Field of View |
| FP | Full Parallax |
| GLOSA | Green Light Optimum Speed Advisory |
| GPS | Global Positioning System |
| HLN | Hazardous Locations Notification |
| HMI | Human-Machine Interface |
| HOP | Horizontal-Only Parallax |
| HUD | Head-up Display |
| I2V | Infrastructure-to-Vehicle |
| IMU | Inertial Measurement Unit |
| ISO | International Organization for Standardization |
| ITS | Intelligent Transportation System |
| IVIM | Infrastructure to Vehicle Information Message |
| IVS | In-Vehicle Signage |
| KPI | Key Peformance Indicator |
| LED | Light-Emitting Diode |
| MAC | Medium Access Control |
| MCM | Maneuver Coordination Message |
| OEM | Original Equipment Manufacturer |
| PCM | Platooning Control Message |
| RFID | Radio-Frequency Identification |
| RSU | Road-Side Unit |
| RWW | Road Works Warning |
| S3D | Stereoscopic 3D |
| SAE | System Architecture Evolution |
| SI | Signalized Intersections |
| SREM | Signal Request Extended Message |
| SSEM | Signal Request Status Extended Message |
| SPATEM | Signal Phase and Timing Extended Message |
| TLC | Traffic Light Control |
| V2I | Vehicle-to-Infrastructure |
| V2V | Vehicle-to-Vehicle |
| V2X | Vehicle-to-Everything |
| VAM | Vulnerable road user Awareness Message |
| VOP | Vertical-Only Parallax |
| VRU | Vulnerable Road User |
| VVA | Valid Viewing Area |
References
- Strayer, D.L.; Cooper, J.M.; Goethe, R.M.; McCarty, M.M.; Getty, D.J.; Biondi, F. Assessing the visual and cognitive demands of in-vehicle information systems. Cogn. Res. Princ. Implic. 2019, 4, 1–22. [Google Scholar] [CrossRef] [PubMed]
- Gaspar, J.; Carney, C. The effect of partial automation on driver attention: A naturalistic driving study. Hum. Factors 2019, 61, 1261–1276. [Google Scholar] [CrossRef] [PubMed]
- Mikkelsen, M.; Wodka, E.L.; Mostofsky, S.H.; Puts, N.A. Autism spectrum disorder in the scope of tactile processing. Dev. Cogn. Neurosci. 2018, 29, 140–150. [Google Scholar] [CrossRef] [PubMed]
- Panagiotidi, M.; Overton, P.G.; Stafford, T. The relationship between ADHD traits and sensory sensitivity in the general population. Compr. Psychiatry 2018, 80, 179–185. [Google Scholar] [CrossRef]
- He, J.L.; Wodka, E.; Tommerdahl, M.; Edden, R.A.; Mikkelsen, M.; Mostofsky, S.H.; Puts, N.A. Disorder-specific alterations of tactile sensitivity in neurodevelopmental disorders. Commun. Biol. 2021, 4, 97. [Google Scholar] [CrossRef]
- Kaufeld, M.; Mundt, M.; Forst, S.; Hecht, H. Optical see-through augmented reality can induce severe motion sickness. Displays 2022, 74, 102283. [Google Scholar] [CrossRef]
- Chang, E.; Kim, H.T.; Yoo, B. Virtual reality sickness: A review of causes and measurements. Int. J.-Hum.-Comput. Interact. 2020, 36, 1658–1682. [Google Scholar] [CrossRef]
- Somrak, A.; Humar, I.; Hossain, M.S.; Alhamid, M.F.; Hossain, M.A.; Guna, J. Estimating VR Sickness and user experience using different HMD technologies: An evaluation study. Future Gener. Comput. Syst. 2019, 94, 302–316. [Google Scholar] [CrossRef]
- Saredakis, D.; Szpak, A.; Birckhead, B.; Keage, H.A.; Rizzo, A.; Loetscher, T. Factors associated with virtual reality sickness in head-mounted displays: A systematic review and meta-analysis. Front. Hum. Neurosci. 2020, 14, 96. [Google Scholar] [CrossRef] [Green Version]
- Pettijohn, K.A.; Peltier, C.; Lukos, J.R.; Norris, J.N.; Biggs, A.T. Virtual and augmented reality in a simulated naval engagement: Preliminary comparisons of simulator sickness and human performance. Appl. Ergon. 2020, 89, 103200. [Google Scholar] [CrossRef]
- Vrellis, I.; Delimitros, M.; Chalki, P.; Gaintatzis, P.; Bellou, I.; Mikropoulos, T.A. Seeing the unseen: User experience and technology acceptance in Augmented Reality science literacy. In Proceedings of the 2020 IEEE 20th International Conference on Advanced Learning Technologies (ICALT), Tartu, Estonia, 6–9 July 2020; pp. 333–337. [Google Scholar]
- Gao, Y.; Li, Z. Generation of 3D Light Field with Reconfigurable Time-Dimension Characteristics based on Integral Imaging. In Proceedings of the 3D Image Acquisition and Display: Technology, Perception and Applications, Washington, DC, USA, 19–23 July 2021. [Google Scholar]
- Dansereau, D.G.; Williams, S.B. Seabed modeling and distractor extraction for mobile AUVs using light field filtering. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; pp. 1634–1639. [Google Scholar]
- Song, Z.; Mohseni, K. Automated AUV docking control with light-field imaging. In Proceedings of the OCEANS 2017-Anchorage, Anchorage, AK, USA, 18–21 September 2017; pp. 1–8. [Google Scholar]
- Sakaue, F.; Sato, J. Active 3D motion visualization based on spatiotemporal light-ray integration. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Seattle, WA, USA, 13–19 June 2020; pp. 1980–1988. [Google Scholar]
- Lee, B.; Hong, J.Y.; Jang, C.; Jeong, J.; Lee, C.K. Holographic and light-field imaging for augmented reality. In Proceedings of the Emerging Liquid Crystal Technologies XII, San Francisco, CA, USA, 31 January–2 February 2017; SPIE: Bellingham, WA, USA, 2017; Volume 10125, pp. 205–212. [Google Scholar]
- Lee, J.h.; Yanusik, I.; Choi, Y.; Kang, B.; Hwang, C.; Park, J.; Nam, D.; Hong, S. Automotive augmented reality 3D head-up display based on light-field rendering with eye-tracking. Opt. Express 2020, 28, 29788–29804. [Google Scholar] [CrossRef] [PubMed]
- Deng, N.; Ye, J.; Chen, N.; Yang, X. Towards stereoscopic on-vehicle AR-HUD. Vis. Comput. 2021, 37, 2527–2538. [Google Scholar] [CrossRef]
- Lee, J.H.; Yanusik, I.; Choi, Y.; Kang, B.; Hwang, C.; Malinovskaya, E.; Park, J.; Nam, D.; Lee, C.; Kim, C.; et al. Optical design of automotive augmented reality 3D head-up display with light-field rendering. In Proceedings of the Advances in Display Technologies XI, online, 6–11 March 2021; SPIE: Bellingham, WA, USA, 2021; Volume 11708, pp. 84–97. [Google Scholar]
- Jeong, E.; Jeon, J.; Kim, S.; Cha, J.W. 54-1: Invited Paper: AR in an Automobile: 3D AR-HUD. In SID Symposium Digest of Technical Papers; Wiley Online Library: New York, NY, USA, 2022; Volume 53, pp. 704–707. [Google Scholar]
- Sechrist, S. The Expanding Vision of Head-Up Displays: HUDs for Cars at Display Week 2017. Inf. Disp. 2017, 33, 18–23. [Google Scholar] [CrossRef] [Green Version]
- Duarte, M.A.; Nunes-Pereira, E.J.; Bret, B.P.; Forté, P.M.; Ferreira, F.P.; Sousa, M.A.; González-Méijome, J.M. Single shot plenoptic optical imaging inspection of a head-up display: Projection distance, astigmatism, field curvature, and distortions. In Proceedings of the Fourth International Conference on Applications of Optics and Photonics, Lisbon, Portugal, 31 May–4 June 2019; SPIE: Bellingham, WA, USA, 2019; Volume 11207, pp. 656–673. [Google Scholar]
- Jackin, B.J. Digitally designed holographic optical elements for large-size light field displays. In Proceedings of the Ultra-High-Definition Imaging Systems III, San Francisco, CA, USA, 3–5 February 2020; SPIE: Bellingham, WA, USA, 2020; Volume 11305, pp. 38–44. [Google Scholar]
- Li, K.; Geng, Y.; Yöntem, A.Ö.; Chu, D.; Meijering, V.; Dias, E.; Skrypchuk, L. Head-up display with dynamic depth-variable viewing effect. Optik 2020, 221, 165319. [Google Scholar] [CrossRef]
- Kara, P.A.; Tamboli, R.R.; Balogh, T.; Appina, B.; Simon, A. On the use-case-specific quality degradations of light field visualization. In Proceedings of the Novel Optical Systems, Methods, and Applications XXIV, San Diego, CA, USA, 1–5 August 2021; SPIE: Bellingham, WA, USA, 2021; Volume 11815, pp. 81–94. [Google Scholar]
- Min, K.; Min, D.; Park, J.H. Non-hogel-based computer-generated hologram from perspective light field. In Proceedings of the Digital Holography and Three-Dimensional Imaging, Cambridge, UK, 1–4 August 2022; Optica Publishing Group: Washington, DC, USA, 2022. [Google Scholar]
- Murugan, S.; Sampathkumar, A.; Kanaga Suba Raja, S.; Ramesh, S.; Manikandan, R.; Gupta, D. Autonomous Vehicle Assisted by Heads up Display (HUD) with Augmented Reality Based on Machine Learning Techniques. In Virtual and Augmented Reality for Automobile Industry: Innovation Vision and Applications; Springer: Berlin/Heidelberg, Germany, 2022; pp. 45–64. [Google Scholar]
- Yöntem, A.O.; Li, K.; Chu, D.; Meijering, V.; Skrypchuk, L. Prospective immersive human-machine interface for future vehicles: Multiple zones turn the full windscreen into a head-up display. IEEE Veh. Technol. Mag. 2020, 16, 83–92. [Google Scholar] [CrossRef]
- Skirnewskaja, J.; Wilkinson, T.D. Automotive Holographic Head-Up Displays. Adv. Mater. 2022, 34, 2110463. [Google Scholar] [CrossRef]
- Yamazato, T. V2X communications with an image sensor. J. Commun. Inf. Netw. 2017, 2, 65–74. [Google Scholar] [CrossRef] [Green Version]
- Wang, J.; Shao, Y.; Ge, Y.; Yu, R. A survey of vehicle to everything (V2X) testing. Sensors 2019, 19, 334. [Google Scholar] [CrossRef] [Green Version]
- Ditta, N.A.; Yaqub, M.; Nadeem, S.; Jamil, S.; Hassan, S.U.; Iqbal, S.; Javed, M.; Elkaeed, E.B.; Alshammari, F.H.; Alwadai, N.; et al. Electrochemical Studies of LbL Films with Dawson Type Heteropolyanion Glassy Carbon Electrode Sensor Modified for Methyl Parathion Detection. Front. Mater. 2022, 9, 877683. [Google Scholar] [CrossRef]
- ISO 21217:2020; Intelligent Transport Systems—Station and Communication Architecture. International Organization for Standardization: Geneva, Switzerland, 2020.
- ETSI EN 302 665 V1.1.1 (2010-09); Intelligent Transport Systems (ITS); Communications Architecture. 2010. Available online: https://www.etsi.org/deliver/etsi_en/302600_302699/302665/01.01.01_60/en_302665v010101p.pdf (accessed on 21 January 2023).
- Institute of Electrical and Electronics Engineers. IEEE Standard for Information technology– Local and metropolitan area networks– Specific requirements– Part 11: Wireless LAN Medium Access Control (MAC) and Physical Layer (PHY) Specifications Amendment 6: Wireless Access in Vehicular Environments. In IEEE Std 802.11p-2010 (Amendment to IEEE Std 802.11-2007 as amended by IEEE Std 802.11k-2008, IEEE Std 802.11r-2008, IEEE Std 802.11y-2008, IEEE Std 802.11n-2009, and IEEE Std 802.11w-2009); IEEE: Piscataway, NJ, USA, 2010; pp. 1–51. [Google Scholar] [CrossRef]
- 3GPP. Release 14 Description; Summary of Rel-14 Work Items; Technical Report (TR) 21.914, 3rd Generation Partnership Project (3GPP); 3GPP, 2017. Available online: https://portal.3gpp.org/desktopmodules/Specifications/SpecificationDetails.aspx?specificationId=3179 (accessed on 21 January 2023).
- Naik, G.; Choudhury, B.; Park, J.M. IEEE 802.11bd & 5G NR V2X: Evolution of Radio Access Technologies for V2X Communications. IEEE Access 2019, 7, 70169–70184. [Google Scholar] [CrossRef]
- Anwar, W.; Franchi, N.; Fettweis, G. Physical Layer Evaluation of V2X Communications Technologies: 5G NR-V2X, LTE-V2X, IEEE 802.11bd, and IEEE 802.11p. In Proceedings of the 2019 IEEE 90th Vehicular Technology Conference (VTC2019-Fall), Honolulu, HI, USA, 22–25 September 2019; pp. 1–7. [Google Scholar] [CrossRef]
- Triwinarko, A.; Cherkaoui, S.; Dayoub, I. Performance of Radio Access Technologies for Next Generation V2VRU Networks. In Proceedings of the ICC 2022—IEEE International Conference on Communications, Seoul, Republic of Korea, 16–20 May 2022; pp. 1524–1529. [Google Scholar] [CrossRef]
- Moshkov, V.V.; Badin, A.D.; Guminskiy, O.A. Research of Characteristics of Radio Technologies of V2V/V2P Systems. In Proceedings of the 2022 Conference of Russian Young Researchers in Electrical and Electronic Engineering (ElConRus), St. Petersburg, Russia, 25–28 January 2022; pp. 64–68. [Google Scholar] [CrossRef]
- ETSI EN 302 636-4-1 V1.4.1 (2020-01); Intelligent Transport Systems (ITS); Vehicular Communications; GeoNetworking; Part 4: Geographical Addressing and Forwarding for Point-to-Point and Point-to-Multipoint Communications; Sub-Part 1: Media-Independent Functionality. 2020. Available online: https://www.etsi.org/deliver/etsi_en/302600_302699/3026360401/01.04.01_60/en_3026360401v010401p.pdf (accessed on 21 January 2023).
- ETSI EN 302 636-5-1 V2.2.1 (2019-05); Intelligent Transport Systems (ITS); Vehicular Communications; GeoNetworking; Part 5: Transport Protocols; Sub-Part 1: Basic Transport Protocol. 2019. Available online: https://www.etsi.org/deliver/etsi_en/302600_302699/3026360501/02.02.01_60/en_3026360501v020201p.pdf (accessed on 21 January 2023).
- IEEE Std 1609.3-2020 (Revision of IEEE Std 1609.3-2016); IEEE Standard for Wireless Access in Vehicular Environments (WAVE)–Networking Services. IEEE: Piscataway, NJ, USA, 2021; pp. 1–344.
- ETSI EN 302 637-2 V1.4.1, (2019-04); European Standard, Intelligent Transport Systems (ITS); Vehicular Communications; Basic Set of Applications; Part 2: Specification of Cooperative Awareness Basic Service. 2019. Available online: https://www.etsi.org/deliver/etsi_en/302600_302699/30263702/01.04.01_60/en_30263702v010401p.pdf (accessed on 21 January 2023).
- ETSI EN 302 637-3 V1.3.1 (2019-04); Intelligent Transport Systems (ITS); Vehicular Communications; Basic Set of Applications; Part 3: Specifications of Decentralized Environmental Notification Basic Service. 2019. Available online: https://www.etsi.org/deliver/etsi_en/302600_302699/30263703/01.03.01_60/en_30263703v010301p.pdf (accessed on 21 January 2023).
- ISO/TS 19321:2020; Intelligent Transport Systems—Cooperative ITS—Dictionary of In-Vehicle Information (IVI) Data Structures. International Organization for Standardization: Geneva, Switzerland, 2020. Available online: https://www.iso.org/standard/76974.html (accessed on 21 January 2023).
- ETSI TS 103 301 V1.3.1 (2020-02); Intelligent Transport Systems (ITS); Vehicular Communications; Basic Set of Applications; Facilities Layer Protocols and Communication Requirements for Infrastructure Services. 2020. Available online: https://www.etsi.org/deliver/etsi_ts/103300_103399/103301/01.03.01_60/ts_103301v010301p.pdf (accessed on 21 January 2023).
- ETSI TR 103 562 V2.1.1 (2019-12); Intelligent Transport Systems (ITS); Vehicular Communications; Basic Set of Applications; Analysis of the Collective Perception Service (CPS); Release 2. 2019. Available online: https://www.etsi.org/deliver/etsi_tr/103500_103599/103562/02.01.01_60/tr_103562v020101p.pdf (accessed on 21 January 2023).
- ETSI TS 103 324 V0.0.52 (2022-12); Intelligent Transport System (ITS); Vehicular Communications; Basic Set of Applications; Collective Perception Service; Release 2. 2022. Available online: https://portal.etsi.org/webapp/WorkProgram/Report_WorkItem.asp?WKI_ID=46541 (accessed on 21 January 2023).
- SAE International. J2735_202211—V2X Communications Message Set Dictionary; SAE International: Warrendale, PA, USA, 2022; Available online: https://www.sae.org/standards/content/j2735_202211/ (accessed on 21 January 2023).
- Car2Car Communication Consortium. Basic System Profile. 2022. Available online: https://www.car-2-car.org/documents/basic-system-profile (accessed on 21 January 2023).
- Car2Car Communication Consortium. Triggering Conditions and Data Quality Dangerous Situation. 2022. Available online: https://www.car-2-car.org/fileadmin/documents/Basic_System_Profile/Release_1.6.3/C2CCC_RS_2003_DangerousSituation.pdf (accessed on 21 January 2023).
- Car2Car Communication Consortium. Triggering Conditions and Data Quality Exchange of IRCs. 2022. Available online: https://www.car-2-car.org/fileadmin/documents/Basic_System_Profile/Release_1.6.3/C2CCC_RS_2004_ExchangeOfIRCs.pdf (accessed on 21 January 2023).
- Car2Car Communication Consortium. Triggering Conditions and Data Quality Adverse Weather Conditions. 2022. Available online: https://www.car-2-car.org/fileadmin/documents/Basic_System_Profile/Release_1.6.3/C2CCC_RS_2002_AdverseWeather.pdf (accessed on 21 January 2023).
- Car2Car Communication Consortium. Triggering Conditions and Data Quality Special Vehicle Warning. 2022. Available online: https://www.car-2-car.org/fileadmin/documents/Basic_System_Profile/Release_1.6.3/C2CCC_RS_2005_SpecialVehicle.pdf (accessed on 21 January 2023).
- Car2Car Communication Consortium. Triggering Conditions and Data Quality Traffic Condition. 2022. Available online: https://www.car-2-car.org/fileadmin/documents/Basic_System_Profile/Release_1.6.2/C2CCC_RS_2007_TrafficJam.pdf (accessed on 21 January 2023).
- Car2Car Communication Consortium. Triggering Conditions and Data Quality Stationary Vehicle Warning. 2022. Available online: https://www.car-2-car.org/fileadmin/documents/Basic_System_Profile/Release_1.6.3/C2CCC_RS_2006_StationaryVehicle.pdf (accessed on 21 January 2023).
- Car2Car Communication Consortium. Automotive Requirements for the Traffic Light Manoeuvre (TLM) and Road and Lane Topology (RLT) Services. 2022. Available online: https://www.car-2-car.org/fileadmin/documents/Basic_System_Profile/Release_1.6.3/C2CCC_RS_2077_TLM_RLT_AutomotiveRequirements.pdf (accessed on 21 January 2023).
- Car2Car Communication Consortium. Automotive Requirements for the Infrastructure to Vehicle Information (IVI) Service. 2022. Available online: https://www.car-2-car.org/fileadmin/documents/Basic_System_Profile/Release_1.6.3/C2CCC_RS_2080_IVI_AutomotiveRequirements.pdf (accessed on 21 January 2023).
- SAE International. On-Board System Requirements for V2V Safety Communications; SAE International: Warrendale, PA, USA, 2020. [Google Scholar]
- SAE International. Dedicated Short Range Communications (DSRC) Performance Requirements for V2V Safety Awareness; SAE International: Warrendale, PA, USA, 2020. [Google Scholar] [CrossRef]
- SAE International. Requirements for Road Weather Applications; SAE International: Warrendale, PA, USA, 2020. [Google Scholar] [CrossRef]
- SAE International. Service Specific Permissions and Security Guidelines for Connected Vehicle Applications; SAE International: Warrendale, PA, USA, 2020. [Google Scholar] [CrossRef]
- SAE International. Vulnerable Road User Safety Message Minimum Performance Requirements; SAE International: Warrendale, PA, USA, 2017. [Google Scholar] [CrossRef]
- SAE International. Requirements for Probe Data Collection Applications; SAE International: Warrendale, PA, USA, 2022. [Google Scholar] [CrossRef]
- ETSI TS 102 723-2 V1.1.1 (2012-11); Intelligent Transport Systems (ITS); OSI Cross-Layer Topics; Part 2: Management Information Base. 2012. Available online: https://www.etsi.org/deliver/etsi_ts/102700_102799/10272302/01.01.01_60/ts_10272302v010101p.pdf (accessed on 21 January 2023).
- ETSI TS 102 941 V2.2.1 (2022-11); Intelligent Transport Systems (ITS); Security; Trust and Privacy Management. 2021. Available online: https://www.etsi.org/deliver/etsi_ts/102900_102999/102941/02.02.01_60/ts_102941v020201p.pdf (accessed on 21 January 2023).
- ETSI TS 102 940 V2.1.1 (2021-07); Intelligent Transport Systems (ITS); Security; ITS Communications Security Architecture and Security Management; Release 2. 2021. Available online: https://www.etsi.org/deliver/etsi_ts/102900_102999/102940/02.01.01_60/ts_102940v020101p.pdf (accessed on 21 January 2023).
- IEEE Standard for Wireless Access in Vehicular Environments–Security Services for Applications and Management Messages. IEEE Std 1609.2-2016 (Revision of IEEE Std 1609.2-2013); IEEE: Piscataway, NJ, USA, 2016; pp. 1–240. [CrossRef]
- IEEE Standard for Wireless Access in Vehicular Environments (WAVE)—Certificate Management Interfaces for End Entities. IEEE Std 1609.2.1-2022 (Revision of IEEE Std 1609.2.1-2020); 2.1-2022 (Revision of IEEE Std 1609.2.1-2020). IEEE: Piscataway, NJ, USA, 2022; pp. 1–261. [CrossRef]
- Olaverri-Monreal, C.; Hasan, A.E.; Bulut, J.; Körber, M.; Bengler, K. Impact of In-Vehicle Displays Location Preferences on Drivers’ Performance and Gaze. IEEE Trans. Intell. Transp. Syst. 2014, 15, 1770–1780. [Google Scholar] [CrossRef]
- Olaverri-Monreal, C.; Jizba, T. Human Factors in the Design of Human–Machine Interaction: An Overview Emphasizing V2X Communication. IEEE Trans. Intell. Veh. 2016, 1, 302–313. [Google Scholar] [CrossRef]
- Kim, H.; Gabbard, J.L.; Anon, A.M.; Misu, T. Driver Behavior and Performance with Augmented Reality Pedestrian Collision Warning: An Outdoor User Study. IEEE Trans. Vis. Comput. Graph. 2018, 24, 1515–1524. [Google Scholar] [CrossRef] [PubMed]
- Wang, Z.; Han, K.; Tiwari, P. Augmented Reality-Based Advanced Driver-Assistance System for Connected Vehicles. In Proceedings of the 2020 IEEE International Conference on Systems, Man, and Cybernetics (SMC), Toronto, ON, Canada, 11–14 October 2020; pp. 752–759. [Google Scholar] [CrossRef]
- Varghese, J.Z.; Boone, R.G. Overview of autonomous vehicle sensors and systems. In Proceedings of the International Conference on Operations Excellence and Service Engineering, Orlando, FL, USA, 10–11 September 2015; pp. 178–191. [Google Scholar]
- Channi, H.K.; Kumar, R. The role of smart sensors in smart city. In Smart Sensor Networks; Springer: Berlin/Heidelberg, Germany, 2022; pp. 27–48. [Google Scholar]
- ETSI TS 103 300-3 V2.1.2 (2021-04); Intelligent Transport Systems (ITS); Vulnerable Road Users (VRU) Awareness; Part 3: Specification of VRU Awareness Basic Service; Release 2. 2021. Available online: https://www.etsi.org/deliver/etsi_ts/103300_103399/10330003/02.01.02_60/ts_10330003v020102p.pdf (accessed on 21 January 2023).
- ETSI TS 103 561 0.0.2 (2022-10); Intelligent Transport Systems (ITS); Vehicular Communications; Basic Set of Applications; Maneuver Coordination Service. 2022. Available online: https://portal.etsi.org/webapp/WorkProgram/Report_WorkItem.asp?WKI_ID=53496 (accessed on 21 January 2023).
- ETSI TR 103 298 0.0.5 (2022-03); Intelligent Transport Systems (ITS); Platooning; Pre-Standardization Study. 2022. Available online: https://portal.etsi.org/webapp/workProgram/Report_WorkItem.asp?wki_id=44191 (accessed on 21 January 2023).
- C-ROADS. The Platform of Harmonised C-ITS Deployment in Europe. 2022. Available online: https://www.c-roads.eu/platform.html (accessed on 21 January 2023).
- C-ROADS. Common C-ITS Service and Use Case Definitions Version 2.0—C-ROADS Platform Documentation, Working Group 2, Technical Aspects, Taskforce 2 Service Harmonisation; 2021. Available online: https://www.c-roads.eu/platform/about/news/News/entry/show/release-20-of-c-roads-harmonised-c-its-specifications.html (accessed on 21 January 2023).
- C2C-CC. Guidance for Day 2 and Beyond Roadmap; v1.2. 2021. Available online: https://www.car-2-car.org/fileadmin/documents/General_Documents/C2CCC_WP_2072_RoadmapDay2AndBeyond_V1.2.pdf (accessed on 21 January 2023).
- ETSI TR 102 638 V1.1.1 (2009-06). Intelligent Transport Systems (ITS); Vehicular Communications; Basic Set of Applications; Definitions. 2009. Available online: https://www.etsi.org/deliver/etsi_tr/102600_102699/102638/01.01.01_60/tr_102638v010101p.pdf (accessed on 21 January 2023).
- Lippman, G. La photographie integrale. Comptes-Rendus Acad. Des Sci. 1908, 146, 446–451. [Google Scholar]
- Gershun, A. The light field. J. Math. Phys. 1939, 18, 51–151. [Google Scholar] [CrossRef]
- Cserkaszky, A.; Barsi, A.; Nagy, Z.; Puhr, G.; Balogh, T.; Kara, P.A. Real-time light-field 3D telepresence. In Proceedings of the IEEE 7th European Workshop on Visual Information Processing (EUVIP), Tampere, Finland, 26–28 November 2018; pp. 1–5. [Google Scholar]
- Kara, P.A.; Tamboli, R.R.; Doronin, O.; Cserkaszky, A.; Barsi, A.; Nagy, Z.; Martini, M.G.; Simon, A. The key performance indicators of projection-based light field visualization. J. Inf. Disp. 2019, 20, 81–93. [Google Scholar] [CrossRef] [Green Version]
- Kovács, P.T.; Lackner, K.; Barsi, A.; Balázs, Á.; Boev, A.; Bregović, R.; Gotchev, A. Measurement of perceived spatial resolution in 3D light-field displays. In Proceedings of the IEEE International Conference on Image Processing, Paris, France, 27–30 October 2014; pp. 768–772. [Google Scholar]
- Kara, P.A.; Kovacs, P.T.; Martini, M.G.; Barsi, A.; Lackner, K.; Balogh, T. Viva la resolution: The perceivable differences between image resolutions for light field displays. In Proceedings of the 5th ISCA/DEGA Workshop on Perceptual Quality of Systems (PQS), Berlin, Germany, 29–31 August 2016; pp. 107–111. [Google Scholar]
- Kara, P.A.; Cserkaszky, A.; Barsi, A.; Papp, T.; Martini, M.G.; Bokor, L. The interdependence of spatial and angular resolution in the quality of experience of light field visualization. In Proceedings of the International Conference on 3D Immersion (IC3D), Brussels, Belgium, 11–12 December 2017; pp. 1–8. [Google Scholar]
- Kovács, P.T.; Bregović, R.; Boev, A.; Barsi, A.; Gotchev, A. Quantifying Spatial and Angular Resolution of Light-Field 3-D Displays. IEEE J. Sel. Top. Signal Process. 2017, 11, 1213–1222. [Google Scholar] [CrossRef]
- Kovács, P.T.; Boev, A.; Bregović, R.; Gotchev, A. Quality measurements of 3D light-field displays. In Proceedings of the Eighth International Workshop on Video Processing and Quality Metrics for Consumer Electronics, Scottsdale, AZ, USA, 30–31 January 2014; pp. 1–6. [Google Scholar]
- Kara, P.A.; Tamboli, R.R.; Cserkaszky, A.; Barsi, A.; Simon, A.; Kusz, A.; Bokor, L.; Martini, M.G. Objective and subjective assessment of binocular disparity for projection-based light field displays. In Proceedings of the International Conference on 3D Immersion (IC3D), Brussels, Belgium, 11 December 2019; pp. 1–8. [Google Scholar]
- Kara, P.A.; Guindy, M.; Xinyu, Q.; Szakal, V.A.; Balogh, T.; Simon, A. The effect of angular resolution and 3D rendering on the perceived quality of the industrial use cases of light field visualization. In Proceedings of the 16th International Conference on Signal Image Technology & Internet based Systems (SITIS), Dijon, France, 19–21 October 2022. [Google Scholar]
- Kara, P.A.; Balogh, T.; Guindy, M.; Simon, A. 3D battlespace visualization and defense applications on commercial and use-case-dedicated light field displays. In Proceedings of the Big Data IV: Learning, Analytics, and Applications, Orlando, FL, USA, 3–7 April 2022; SPIE: Bellingham, WA, USA, 2022; Volume 12097, pp. 183–191. [Google Scholar]
- Liu, D.; Wang, L.; Li, L.; Xiong, Z.; Wu, F.; Zeng, W. Pseudo-sequence-based light field image compression. In Proceedings of the 2016 IEEE International Conference on Multimedia & Expo Workshops (ICMEW), Seattle, WA, USA, 11–15 July 2016; pp. 1–4. [Google Scholar]
- Cserkaszky, A.; Kara, P.A.; Tamboli, R.R.; Barsi, A.; Martini, M.G.; Bokor, L.; Balogh, T. Angularly continuous light-field format: Concept, implementation, and evaluation. J. Soc. Inf. Disp. 2019, 27, 442–461. [Google Scholar] [CrossRef]
- Wijnants, M.; Lievens, H.; Michiels, N.; Put, J.; Quax, P.; Lamotte, W. Standards-compliant HTTP adaptive streaming of static light fields. In Proceedings of the 24th ACM Symposium on Virtual Reality Software and Technology, Tokyo, Japan, 28 November–1 December 2018; pp. 1–12. [Google Scholar]
- Adhikarla, V.K.; Sodnik, J.; Szolgay, P.; Jakus, G. Exploring direct 3D interaction for full horizontal parallax light field displays using leap motion controller. Sensors 2015, 15, 8642–8663. [Google Scholar] [CrossRef]
- Yang, J.; Wang, L.; Ren, L.; Cao, Y.; Cao, Y. Light field angular super-resolution based on structure and scene information. Appl. Intell. 2022, 1–17. [Google Scholar] [CrossRef]
- Cao, Y.; Wang, L.; Ren, L.; Yang, J.; Cao, Y. View position prior-supervised light field angular super-resolution network with asymmetric feature extraction and spatial-angular interaction. Neurocomputing 2023, 518, 206–218. [Google Scholar] [CrossRef]
- Liu, G.; Yue, H.; Yang, J. A Coarse-to-Fine Convolutional Neural Network for Light Field Angular Super-Resolution. In Proceedings of the CAAI International Conference on Artificial Intelligence, Beijing, China, 27–28 August 2022; Springer: Berlin/Heidelberg, Germany, 2022; pp. 268–279. [Google Scholar]
- Yu, L.; Ma, Y.; Hong, S.; Chen, K. Reivew of Light Field Image Super-Resolution. Electronics 2022, 11, 1904. [Google Scholar] [CrossRef]
- Wang, X.; Ma, J.; Yi, P.; Tian, X.; Jiang, J.; Zhang, X.P. Learning an epipolar shift compensation for light field image super-resolution. Inf. Fusion 2022, 79, 188–199. [Google Scholar] [CrossRef]
- Liang, Z.; Wang, Y.; Wang, L.; Yang, J.; Zhou, S. Light field image super-resolution with transformers. IEEE Signal Process. Lett. 2022, 29, 563–567. [Google Scholar] [CrossRef]
- Fu, K.; Jiang, Y.; Ji, G.P.; Zhou, T.; Zhao, Q.; Fan, D.P. Light field salient object detection: A review and benchmark. Computational Visual Media 2022, 8, 509–534. [Google Scholar] [CrossRef]
- Duan, F.; Wu, Y.; Guan, H.; Wu, C. Saliency Detection of Light Field Images by Fusing Focus Degree and GrabCut. Sensors 2022, 22, 7411. [Google Scholar] [CrossRef]
- Feng, M.; Liu, K.; Zhang, L.; Yu, H.; Wang, Y.; Mian, A. Learning from Pixel-Level Noisy Label: A New Perspective for Light Field Saliency Detection. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, New Orleans, LA, USA, 19–20 June 2022; pp. 1756–1766. [Google Scholar]
- Suhail, M.; Esteves, C.; Sigal, L.; Makadia, A. Light Field Neural Rendering. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, New Orleans, LA, USA, 19–20 June 2022; pp. 8269–8279. [Google Scholar]
- Wen, J.; Jiang, X.; Yan, X.; Yan, Z.; Wang, J.; Chen, S. Demonstration of a novel multi-cameras light field rendering system and its application. Optik 2022, 253, 167759. [Google Scholar] [CrossRef]
- Ye, T.; Chen, S.; Liu, Y.; Ye, Y.; Chen, E.; Li, Y. Underwater Light Field Retention: Neural Rendering for Underwater Imaging. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, New Orleans, LA, USA, 19–20 June 2022; pp. 488–497. [Google Scholar]
- Salem, A.; Ibrahem, H.; Kang, H.S. Light Field Reconstruction Using Residual Networks on Raw Images. Sensors 2022, 22, 1956. [Google Scholar] [CrossRef]
- Liu, J.; Song, N.; Xia, Z.; Liu, B.; Pan, J.; Ghaffar, A.; Ren, J.; Yang, M. A dense light field reconstruction algorithm for four-dimensional optical flow constraint equation. Pattern Recognit. 2023, 134, 109101. [Google Scholar] [CrossRef]
- Zhou, F.; Qiao, W.; Chen, L. Fabrication technology for light field reconstruction in glasses-free 3D display. J. Inf. Disp. 2022, 1–17. [Google Scholar] [CrossRef]
- Kim, K. Single-shot light-field microscopy: An emerging tool for 3D biomedical imaging. BioChip J. 2022, 16, 397–408. [Google Scholar] [CrossRef]
- Wang, D.; Zhu, Z.; Xu, Z.; Zhang, D. Neuroimaging with light field microscopy: A mini review of imaging systems. Eur. Phys. J. Spec. Top. 2022, 231, 749–761. [Google Scholar] [CrossRef]
- Zhang, Y.; Wang, Y.; Wang, M.; Guo, Y.; Li, X.; Chen, Y.; Lu, Z.; Wu, J.; Ji, X.; Dai, Q. Multi-focus light-field microscopy for high-speed large-volume imaging. PhotoniX 2022, 3, 1–20. [Google Scholar] [CrossRef]
- Guindy, M.; Barsi, A.; Kara, P.A.; Adhikarla, V.K.; Balogh, T.; Simon, A. Camera animation for immersive light field imaging. Electronics 2022, 11, 2689. [Google Scholar] [CrossRef]
- Wang, B.; Peng, Q.; Wang, E.; Xiang, W.; Wu, X. User-dependent interactive light field video streaming system. Multimed. Tools Appl. 2022, 81, 1893–1918. [Google Scholar] [CrossRef]
- PhiCong, H.; Perry, S.; Cheng, E.; HoangVan, X. Objective Quality Assessment Metrics for Light Field Image Based on Textural Features. Electronics 2022, 11, 759. [Google Scholar] [CrossRef]
- Gu, K.; Liu, H.; Zhou, C. Quality Assessment of Light-Field Image. In Quality Assessment of Visual Content; Springer: Berlin/Heidelberg, Germany, 2022; pp. 165–190. [Google Scholar]
- Simon, A.; Kara, P.A.; Guindy, M.; Qiu, X.; Szy, L.; Balogh, T. One step closer to a better experience: Analysis of the suitable viewing distance ranges of light field visualization usage contexts for observers with reduced visual capabilities. In Proceedings of the Novel Optical Systems, Methods, and Applications XXV, San Diego, CA, USA, 21–25 August 2022; SPIE: Bellingham, WA, USA, 2022; Volume 12216, pp. 133–143. [Google Scholar]
- Kara, P.A.; Tamboli, R.R.; Shafiee, E.; Martini, M.G.; Simon, A.; Guindy, M. Beyond perceptual thresholds and personal preference: Towards novel research questions and methodologies of quality of experience studies on light field visualization. Electronics 2022, 11, 953. [Google Scholar] [CrossRef]
- Alamgeer, S.; Farias, M.C. A survey on visual quality assessment methods for light fields. Signal Process. Image Commun. 2023, 110, 116873. [Google Scholar] [CrossRef]
- Sackl, A.; Schatz, R. Evaluating the impact of expectations on end-user quality perception. In Proceedings of the International Workshop on Perceptual Quality of Systems (PQS), Vienna, Austria, 2–4 September 2013; pp. 122–128. [Google Scholar]
- Kara, P.A.; Cserkaszky, A.; Martini, M.G.; Bokor, L.; Simon, A. The effect of labeling on the perceived quality of HDR video transmission. Cogn. Technol. Work. 2020, 22, 585–601. [Google Scholar] [CrossRef] [Green Version]
- Geyer, F.A.; Szakal, V.A.; Kara, P.A.; Simon, A. Cognitive-bias-induced differences in the perceived video quality of rugged and conventional smartphones. In Proceedings of the 16th International Conference on Signal Image Technology & Internet based Systems (SITIS), Dijon, France, 19–21 October 2022. [Google Scholar]
- Balogh, T.; Barsi, A.; Kara, P.A.; Guindy, M.; Simon, A.; Nagy, Z. 3D light field LED wall. In Proceedings of the Digital Optical Technologies 2021, online, 21–25 June 2021; SPIE: Bellingham, WA, USA, 2021; Volume 11788, pp. 180–190. [Google Scholar]
- Balogh, T. Method and Apparatus for Generating 3D Images. Patent WO 2005/117458 A2, 8 December 2005. [Google Scholar]
- Gabbard, J.L.; Fitch, G.M.; Kim, H. Behind the glass: Driver challenges and opportunities for AR automotive applications. Proc. IEEE 2014, 102, 124–136. [Google Scholar] [CrossRef]
- Charissis, V.; Papanastasiou, S.; Vlachos, G. Interface development for early notification warning system: Full windshield head-up display case study. In Proceedings of the International Conference on Human-Computer Interaction, San Diego, CA, USA, 19–24 July 2009; Springer: Berlin/Heidelberg, Germany, 2009; pp. 683–692. [Google Scholar]
- Bark, K.; Tran, C.; Fujimura, K.; Ng-Thow-Hing, V. Personal Navi: Benefits of an Augmented Reality Navigational Aid Using a See-Thru 3D Volumetric HUD. In Proceedings of the 6th International Conference on Automotive User Interfaces and Interactive Vehicular Applications, Seattle, WA, USA, 17–19 September 2014; pp. 1–8. [Google Scholar]
- Rao, Q.; Grünler, C.; Hammori, M.; Chakraborty, S. Design methods for augmented reality in-vehicle infotainment systems. In Proceedings of the 2014 51st ACM/EDAC/IEEE Design Automation Conference (DAC), San Francisco, CA, USA, 1–5 June 2014; pp. 1–6. [Google Scholar]
- Wittmann, M.; Kiss, M.; Gugg, P.; Steffen, A.; Fink, M.; Pöppel, E.; Kamiya, H. Effects of display position of a visual in-vehicle task on simulated driving. Appl. Ergon. 2006, 37, 187–199. [Google Scholar] [CrossRef] [PubMed]
- Doshi, A.; Cheng, S.Y.; Trivedi, M.M. A Novel Active Heads-Up Display for Driver Assistance. IEEE Trans. Syst. Man, Cybern. Part (Cybern.) 2009, 39, 85–93. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wu, W.; Blaicher, F.; Yang, J.; Seder, T.; Cui, D. A Prototype of Landmark-Based Car Navigation Using a Full-Windshield Head-up Display System. In Proceedings of the 2009 Workshop on Ambient Media Computing, AMC ’09, Beijing, China, 23 October 2009; Association for Computing Machinery: New York, NY, USA, 2009; pp. 21–28. [Google Scholar] [CrossRef]
- Olaverri-Monreal, C.; Gvozdic, M.; Muthurajan, B. Effect on driving performance of two visualization paradigms for rear-end collision avoidance. In Proceedings of the 2017 IEEE 20th International Conference on Intelligent Transportation Systems (ITSC), Yokohama, Japan, 16–19 October 2017; pp. 77–82. [Google Scholar] [CrossRef]
- Olaverri-Monreal, C. Road Safety: Human Factors Aspects of Intelligent Vehicle Technologies. In Proceedings of the Smart Cities, Green Technologies, and Intelligent Transport Systems, Heraklion, Crete, Greece, 3–5 May 2019; Donnellan, B., Klein, C., Helfert, M., Gusikhin, O., Pascoal, A., Eds.; Springer International Publishing: Cham, Switzerland, 2019; pp. 318–332. [Google Scholar]
- Wang, W.; Zhu, X.; Chan, K.; Tsang, P. Digital Holographic System for Automotive Augmented Reality Head-Up-Display. In Proceedings of the 2018 IEEE 27th International Symposium on Industrial Electronics (ISIE), Cairns, QLD, Australia, 13–15 June 2018; pp. 1327–1330. [Google Scholar] [CrossRef]
- Coni, P.; Damamme, N.; Bardon, J.L. The Future of Holographic Head-Up Display. IEEE Consum. Electron. Mag. 2019, 8, 68–73. [Google Scholar] [CrossRef]
- Bram-Larbi, K.; Charissis, V.; Khan, S.; Lagoo, R.; Harrison, D.K.; Drikakis, D. Collision Avoidance Head-Up Display: Design Considerations for Emergency Services’ Vehicles. In Proceedings of the 2020 IEEE International Conference on Consumer Electronics (ICCE), Las Vegas, NV, USA, 4–6 January 2020; pp. 1–7. [Google Scholar] [CrossRef]
- Maruta, K.; Takizawa, M.; Fukatsu, R.; Wang, Y.; Li, Z.; Sakaguchi, K. Blind-Spot Visualization via AR Glasses using Millimeter-Wave V2X for Safe Driving. In Proceedings of the 2021 IEEE 94th Vehicular Technology Conference (VTC2021-Fall), online, 27 September–28 October 2021; pp. 1–5. [Google Scholar] [CrossRef]
- Kara, P.A.; Barsi, A.; Tamboli, R.R.; Guindy, M.; Martini, M.G.; Balogh, T.; Simon, A. Recommendations on the viewing distance of light field displays. In Proceedings of the Digital Optical Technologies 2021, online, 21–25 July 2021; Volume 11788. [Google Scholar]
- Zhang, X.; Braley, S.; Rubens, C.; Merritt, T.; Vertegaal, R. LightBee: A self-levitating light field display for hologrammatic telepresence. In Proceedings of the CHI Conference on Human Factors in Computing Systems, Glasgow, UK, 4–9 May 2019; pp. 1–10. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Facilities Protocol | Title | Standard |
|---|---|---|
| CAM | Basic Set of Applications; Part 2: Specification of Cooperative Awareness Basic Service | ETSI EN 302 637-2 V1.4.1 (2019-04) |
| DENM | Basic Set of Applications; Part 3: Specifications of Decentralized Environmental Notification Basic Service | ETSI EN 302 637-3 V1.3.1 (2019-04) |
| SPATEM/MAPEM | Dedicated Short-Range Communications (DSRC) Message Set Dictionary J2735_201603/Basic Set of Applications; Part 3: Specifications of Decentralized Environmental Notification Basic Service | SAE J2735/ETSI TS 103 301 V2.1.1 (2021-03) |
| IVIM | Dictionary of in-vehicle information (IVI) data structures/Basic Set of Applications; Part 3: Specifications of Decentralized Environmental Notification Basic Service | CEN ISO/TS 19321:2020/ETSI TS 103 301 V2.1.1 (2021-03) |
| SSEM/SSREM | Dedicated Short-Range Communications (DSRC) Message Set Dictionary J2735_201603/Part 2: Applications and facilities layer common data dictionary | SAE J2735/ETSI TS 102 894-2 V2.1.1 (2022-11) |
| VAM | Dedicated Short-Range Communications (DSRC) Message Set Dictionary J2735_201603/Vulnerable Road User Safety Message Minimum Performance Requirements J2945/9_201703/Vulnerable Road Users (VRU) awareness; Part 3: Specification of VRU awareness basic service; Release 2 | SAE J2735, SAE J2945/9_201703/ETSI TS 103 300-3 V2.1.2 (2021-04) |
| CPM | Basic Set of Applications; Analysis of the Collective Perception Service (CPS); Release 2/Intelligent Transport Systems (ITS); Cooperative Perception Services | ETSI TR 103 562 V2.1.1 (2019-12)/ETSI TS 103 324 |
| SAEM | Facilities layer function; Part 1: Services Announcement (SA) specification | ETSI TS 102 890-1 V1.1.1 (2017-05) |
| PCM | Intelligent Transport Systems (ITS); Platooning; Pre-standardization study | ETSI TR 103 298 (2022-03) |
| MCM | Intelligent Transport Systems (ITS); Vehicular Communications; Informative report for the Maneuver Coordination Service | ETSI TR 103 578 (2022-11) |
| ITS Service Group | Description | Example Use cases |
|---|---|---|
| In-vehicle signage (IVS) | The main task of IVS services is to inform road users (primarily vehicle drivers) about the actual permanent and dynamic road signs. Indications can be either advisory or mandatory. |
|
| Hazardous Locations Notification (HLN) | HLN services essentially provide warning messages about potentially dangerous road sections. Road users approaching such road sections receive information about the location, type, and duration of the hazardous event if known. |
|
| Road Works Warning (RWW) | RWW ITS services aim to increase the safety of workers on or near the road and vehicles participating in traffic, reduce the number of accidents between vehicles and emergency/road operator vehicles, and comprehensively increase the comfort of road users. |
|
| Signalized Intersections (SI) | SI services were created to provide safer, easier, and more efficient crossings with minimized environmental pollution at signalized intersections by sharing infrastructure information with road users and vehicle data with traffic light controllers. |
|
| V2V-specific use cases | Services running on vehicles specified by the so-called Day 1 V2X system features and identified as the first set of use cases using V2V communications. |
|
| Research Effort | Year | Technology | Contribution |
|---|---|---|---|
| Wittmann et al. [134] | 2006 | Simulation | Review, proposal, evaluation |
| Charissis et al. [131] | 2009 | Simulation | Proposal, evaluation |
| Doshi et al. [135] | 2009 | AR | Proposal, prototype, evaluation |
| Wu et al. [136] | 2009 | AR | Proposal, prototype, evaluation |
| Prototype of Holografika 1 | 2013 | Light field | Prototype |
| Bark et al. [132] | 2014 | AR | Proposal, evaluation |
| Gabbard et al. [130] | 2014 | AR | Review |
| Olaverri-Monreal et al. [71] | 2014 | Simulation | Proposal, evaluation |
| Rao et al. [133] | 2014 | AR | Review, proposal |
| Olaverri-Monreal et al. [72] | 2016 | AR | Review, proposal |
| Lee et al. [16] | 2017 | AR, light field | Review, proposal |
| Olaverri-Monreal et al. [137] | 2017 | Simulation | Proposal, evaluation |
| Sechrist [21] | 2017 | AR | Review |
| Kim et al. [73] | 2018 | AR | Proposal, prototype, evaluation |
| Olaverri-Monreal [138] | 2018 | Simulation | Review, proposal |
| Wang et al. [139] | 2018 | AR, light field | Proposal, prototype, evaluation |
| Doshi et al. [140] | 2019 | AR | Review |
| Bram-Larbi et al. [141] | 2020 | AR | Review, proposal |
| Lee et al. [17] | 2020 | AR, light field | Proposal, prototype, evaluation |
| Yöntem et al. [28] | 2020 | AR | Review, proposal, prototype |
| Wang et al. [74] | 2020 | Simulation | Proposal, evaluation |
| Deng et al. [18] | 2021 | AR | Proposal, prototype, evaluation |
| Lee et al. [19] | 2021 | AR, light field | Proposal, prototype |
| Maruta et al. [142] | 2021 | AR | Proposal, prototype, evaluation |
| Jeong et al. [20] | 2022 | AR | Proposal, prototype |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kara, P.A.; Wippelhauser, A.; Balogh, T.; Bokor, L. How I Met Your V2X Sensor Data: Analysis of Projection-Based Light Field Visualization for Vehicle-to-Everything Communication Protocols and Use Cases. Sensors 2023, 23, 1284. https://doi.org/10.3390/s23031284
Kara PA, Wippelhauser A, Balogh T, Bokor L. How I Met Your V2X Sensor Data: Analysis of Projection-Based Light Field Visualization for Vehicle-to-Everything Communication Protocols and Use Cases. Sensors. 2023; 23(3):1284. https://doi.org/10.3390/s23031284
Chicago/Turabian StyleKara, Peter A., Andras Wippelhauser, Tibor Balogh, and Laszlo Bokor. 2023. "How I Met Your V2X Sensor Data: Analysis of Projection-Based Light Field Visualization for Vehicle-to-Everything Communication Protocols and Use Cases" Sensors 23, no. 3: 1284. https://doi.org/10.3390/s23031284