Design of a Test for Detecting the Presence of Impulsive Noise



The Division of Electrical Engineering, Hanyang University, Ansan 15588, Korea
*
Author to whom correspondence should be addressed.
Sensors 2020, 20(24), 7135; https://doi.org/10.3390/s20247135
Submission received: 26 October 2020
/
Revised: 30 November 2020
/
Accepted: 7 December 2020
/
Published: 12 December 2020
(This article belongs to the Section Communications)
Abstract
:This paper proposes a new test method of detecting the presence of impulsive noise based on a complementary cumulative density function (CCDF). Impulsive noise severely degrades performance of communication systems and the conventional Kolmogorov–Smirnov (K–S) test may not perform well, because the test does not consider the characteristics of impulsive noise. In order to detect the presence of impulsive noise reliably, the CCDF of measurement samples is analyzed and compared with the CCDF of additive white Gaussian noise to find the difference between those CCDFs. Due to the nature of heavy-tails in impulsive noise, only the maximum difference may not be sufficient for the accurate detection of impulsive noise. Therefore, the proposed method applies the test hypothesis using the weighted sum of all the differences between those CCDFs. Simulation results justify that the proposed test is more robust and provides lower miss detection probability than the K–S test in the presence of impulsive noise.
1. Introduction
Most existing digital communication systems are designed to perform optimally in an additive white Gaussian noise (AWGN) environment, but there are some environments where impulsive noise is dominant [1,2]. For example, the performance of the vehicular network in the presence of a cellular network is limited by impulsive noise [3,4]. Since the performance of conventional communication systems is severely degraded in such an environment, detecting the presence of impulsive noise is an important task in most communication systems [5]. Upon the detection of impulsive noise, a receiver can execute a special filter, such as a non-linearity pre-processor [6,7] which is designed based on the characteristics of impulsive noise, to circumvent the impulsiveness of the noise and further achieve the optimal performance in an impulsive noise environment [8,9].
Various studies [10,11,12,13,14,15,16,17] that considered impulsive noise, including power line communications [10] and environments such as a underwater environment [11] in their conclusion. A noise detection method was researched [12,13,14,15,16,17] in an environment with impulsive noise. A previous study [12] reported the actual disturbances encountered by devices operating in one of the bands of interest during normal use. Time-domain measurement procedures are proposed to measure radiated transient interference, which is a source of distortion that offers performance degradation of wireless digital communication systems [13,14,15]. Because transient electromagnetic interference has an enormous impact on the performance of mobile communications on railways, the analysis tool of electromagnetic interference is presented based on a computation of minima so that the power ratio between transmitted signal and interference is smaller than a certain threshold [16,17], but it is difficult to adapt this scheme to a practical system since the threshold is numerically calculated.
Kolmogorov–Smirnov (K–S) test is a well-known normality test, where it quantifies the distance between the empirical cumulative distribution function (CDF) of observed samples and the reference distribution [18,19]. The K–S test is a non-parametric method to measure the goodness of a fit and the K–S detector does not require prior knowledge of the signal. To determine the noise environment and whether it is an AWGN or not, it may be suitable to employ the K–S test, but unfortunately, this test does not offer satisfactory classification about the performance when impulsive noise is present because the test does not consider the characteristics of impulsive noise. In addition, the K–S test is used for various purposes in the literature as well. In a previous study [20], a sequential K–S test was used to achieve fast spectrum sensing to identify the unused spectrum to give to an unlicensed user. The test is also used in modulation classification performed at a receiver based on received samples before demodulation [18]. Ref. [21] proposes a signal to noise ratio (SNR) estimator based on the K–S test and binary search scheme that reduces a large number of additions. Furthermore, the K–S test is used in a multiple-input multiple-output (MIMO) system for blind identification of spatial multiplexing and Alamouti space–time block code based on the correlation property of adjacent samples in [19]. In a previous study [22], the performance of normality tests for non-normal data with the various tests are compared. Their simulation results indicate that the K–S test is the most powerful test when the sample size is large (>100). However, the simulation results do not prove that the performance of K–S test is optimized for the classification of impulsive noise. Because even though the probability density of impulsive noise has heavy-tails characteristics, the K–S test utilizes only the maximum difference, not the heavy-tails characteristics of impulsive noise. If a test cannot classify the noise model correctly, the communication strategy may be incorrect; this will cause a severe degradation in communication performance.
Motivated by the aforementioned issues, this paper proposes a method to detect the presence of impulsive noise. From the received signal, the empirical complementary cumulative distribution function (CCDF) of the amplitude is computed, which explicitly shows the characteristics of impulsive noise. For comparisons, the CCDF of the amplitude under AWGN is computed in advance as a reference in advance. In order to detect the presence of impulsive noise reliably, the proposed method compares the empirical CCDF of measurement samples and the reference CCDF of AWGN to find the difference between those CCDFs. Due to the nature of heavy-tails in impulsive noise, only the maximum difference may not be sufficient for the accurate detection of impulsive noise. Thus, the proposed method applies the test hypothesis using the weighted sum of all the differences between those CCDFs. Middleton class A noise and symmetric stable (SS) noise models are considered for the models of impulsive noise. Simulation results show that the proposed test provides a lower detection error rate than the conventional K–S test.
This paper is organized as follows. In Section 2.1, we present the impulsive noise and signal models. In Section 3, we briefly introduces the K–S test and hypothesises for the test. In Section 4, we present the approximated distribution of the difference mentioned above on a certain amplitude, then the test is proposed by examining the distributions about observed amplitudes. In Section 6, the simulation results are presented in various environments. Finally, we conclude this paper with a brief summary, which is presented in Section 7.
2. Noise Models and Motivation for Noise Classification
2.1. Impulsive Noise and Received Signal Models
Consider a receiver with a received signal that only consists of noise samples. The l-th received sample at the receiver is written as
where is the complex-valued noise sample at time l and L is the total number of the received samples by measurements. The noise samples are assumed to be additive white noise and their distribution is either Gaussian noise or impulsive noise. Among various impulsive noise models, Middleton class A noise and SS noise models are widely accepted in the literature because their models are derived from the real physical mechanisms that generate disturbance in communication systems and agree well with physical phenomena [1,2].
The probability density function (PDF) of the instantaneous amplitude of Middleton class A noise is given as [1]
where the variance is expressed as
where is the average power of the noise. The parameter A is denoted as the impulsive index, which is the average number of m concerning the probability [23]. is called the Gaussian factor which is the ratio of the intensity of the independent Gaussian components and that of non-Gaussian components.
The other noise model is SS noise model. A characteristic function of SS noise is defined as
where is the scale parameter larger than 0, is the location parameter with , and is the shape parameter with . Note that the PDF of the SS noise is calculated by inverse Fourier transform, since the PDF does not have a closed form.
2.2. Motivation for Noise Classification
As mentioned earlier, noise classification (or an identification of noise statistics) of the surrounding environment is of prime importance for communication systems, since the optimal receiver design is based on the noise statistics to achieve optimal error performance. Note that most existing communication systems are designed to achieve optimal performance in an AWGN environment and those existing systems suffer significant performance loss in another noise environment.
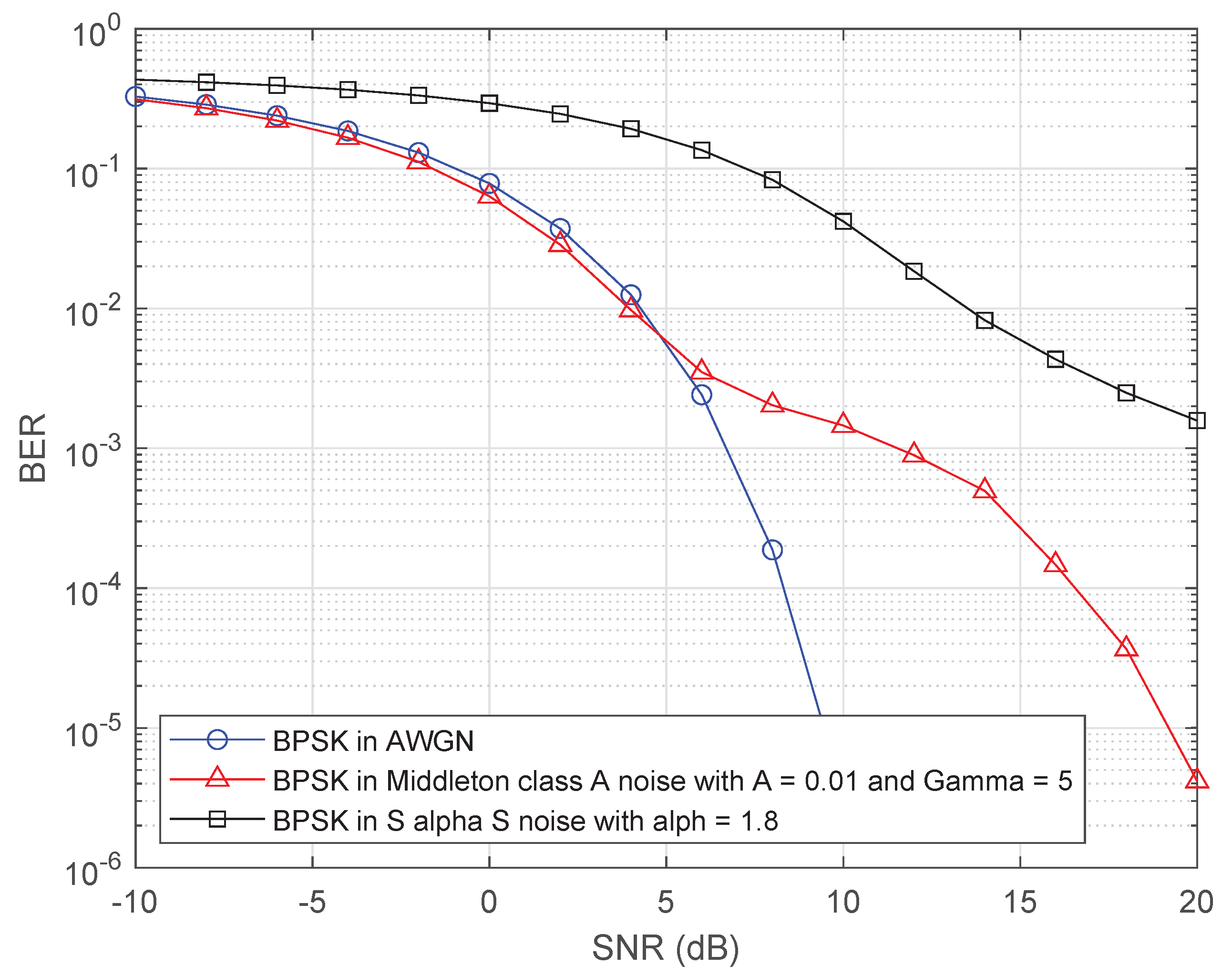
Figure 1 shows a bit error rate (BER) performances of the conventional receiver with a binary phase-shift keying (BPSK) in impulsive noise and AWGN. In the case of an AWGN environment, the BER graph of BPSK is exponentially decreased as an SNR increases. When impulsive noise is present, however, the BER graph of BPSK shows a plateau due to the impulsive component. This clearly indicates that there is a performance loss for the conventional receiver when impulsive noise is present. Thus, a receiver needs to first classify the noise model in the given environment as accurately as possible in order to avoid or mitigate such performance loss. For this reason, it is essential to classify the noise model to decide a valid strategy since the communication method depends on the noise environment.
3. Conventional Kolmogorov–Smirnov Test
The K–S test is a non-parametric test based on the maximum difference between an empirical and a hypothetical cumulative distribution [24]. Failing to reject the null hypothesis shows that two data populations are drawn from the same distribution to a certain required level of significance. On the other hand, accepting the alternative hypothesis that they are from different distributions can be used. The hypotheses are stated as
where is a hypothesized CDF and is an empirical CDF of the amplitude of received samples. Here, the hypotheses and are stated as a set of Gaussian amplitudes and a set of non-Gaussian amplitudes, respectively. The theoretical CDF of AWGN amplitude for the K–S test is computed as
where and is a complex noise power. In the K–S test, the largest absolute difference between the empirical and the hypothesized CDFs is used as the goodness-of-fit statistic, which is given by
where is the value of the empirical CDF evaluated at x. For practical implementation with N measurement samples, where are the amplitudes of those samples in ascending order, the difference between the empirical and the hypothesized CDFs for practical environments is computed as
In addition, an empirical CDF from the measurement samples is computed as
where I is an indicator function that gives one if the condition is true for a sample, and zero otherwise and is the amplitude of the received sample in ascending order. The hypothesis is rejected at a significance level once , where is given as [18]
where . [24] has demonstrated that is convergent with thousands of m terms that may have large complexity for small error.
For detecting the presence of impulsive noise, the hypotheses in (5) are stated as
4. Proposed Test
Although the K–S test is a common method to measure the goodness of a fit, [25] mentions that a test using K–S statistic to impulsive noise samples have poor performance since K–S statistic does not consider the characteristics of non-normal samples. This section proposes a test to detect the presence of impulsive noise considering the characteristics of impulsive noise. First, the idea behind the design of the proposed test is discussed. Then, an approximation of the threshold for the test hypothesis to satisfy target false alarm probability is presented.
Design of the Proposed Test
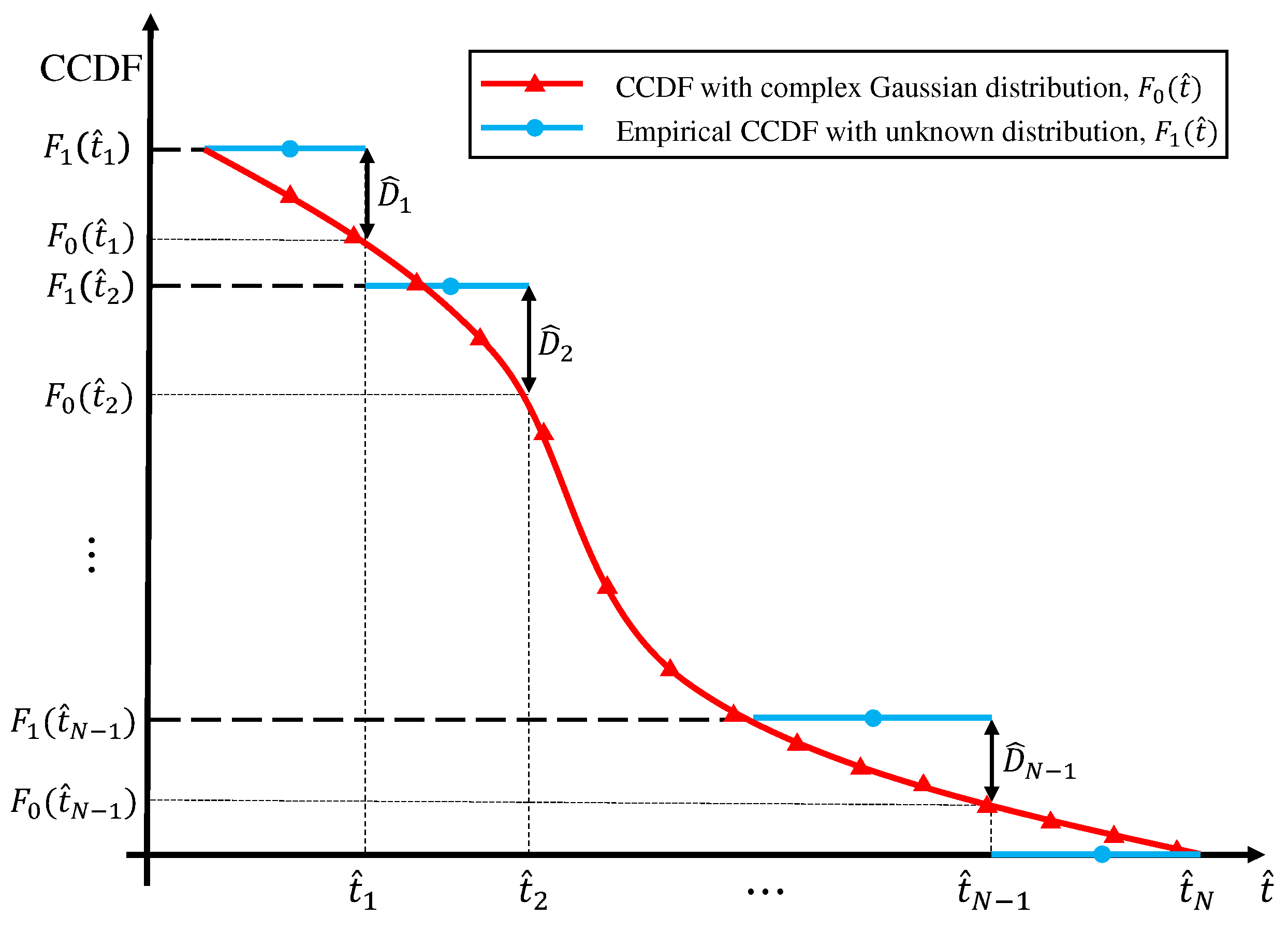
The discriminating feature for detecting the presence of impulsive noise is CCDF of the received signals are normalized amplitude since the bell-curve density of impulsive noise has a heavy-tails. The CCDF of the normalized amplitude of the received signal is compared with the reference CCDF of AWGN. Let us consider a measurement campaign that observes N noise measurement samples, where are the amplitudes of those samples in ascending order, i.e., is the i-th smallest amplitude of the measurement samples. Since the value of , the i-th smallest amplitude of the measurement samples, may not be the same for every measurement campaign, can be considered as a discrete random variable. Let denote the actual value of the i-th smallest sample from a measurement campaign. Figure 2 illustrates the theoretical CCDF of complex Gaussian distribution and the empirical CCDF, which consists of those measurement samples with unknown distribution. The empirical CCDF is a decreasing step function that has the same number of steps as the number of samples because the number of measurement samples is finite. is the absolute difference between the two CCDFs for and is can be represented as
which is a random variable since is a random variable. When measurement samples are available, is defined as the absolute value of the difference at and is computed as
where is computed by substituting t into in (6) and is given as . That is, all the values of are obtained by (13) where in ascending order. Since the empirical CCDF on equals to zero, is not considered. Comparisons are carried out between the received signals CCDF and reference CCDF as shown in Figure 2. Unlike the conventional K–S test, the proposed test method considers all the values of between the CCDFs in order to detect the presence of impulsive noise reliably. In addition, we employ a weighted sum of the probabilities of differences between the CCDFs for the proposed test since they are not equally weighted due to the characteristic of heavy-tails in impulsive noise.
To sum up, the proposed test is defined as
where is the significance level, and will be discussed below. Finally, an algorithm based on (14) will be depicted. Firstly, in (14) is computed as
where is the discrete probability density function of and k is the index of the discrete values of . is the set of those indices that satisfy the following condition:
can be obtained by k samples with the probability , and samples with the probability , and the number of selecting k samples with the probability among N samples is . Therefore, the probability is computed as
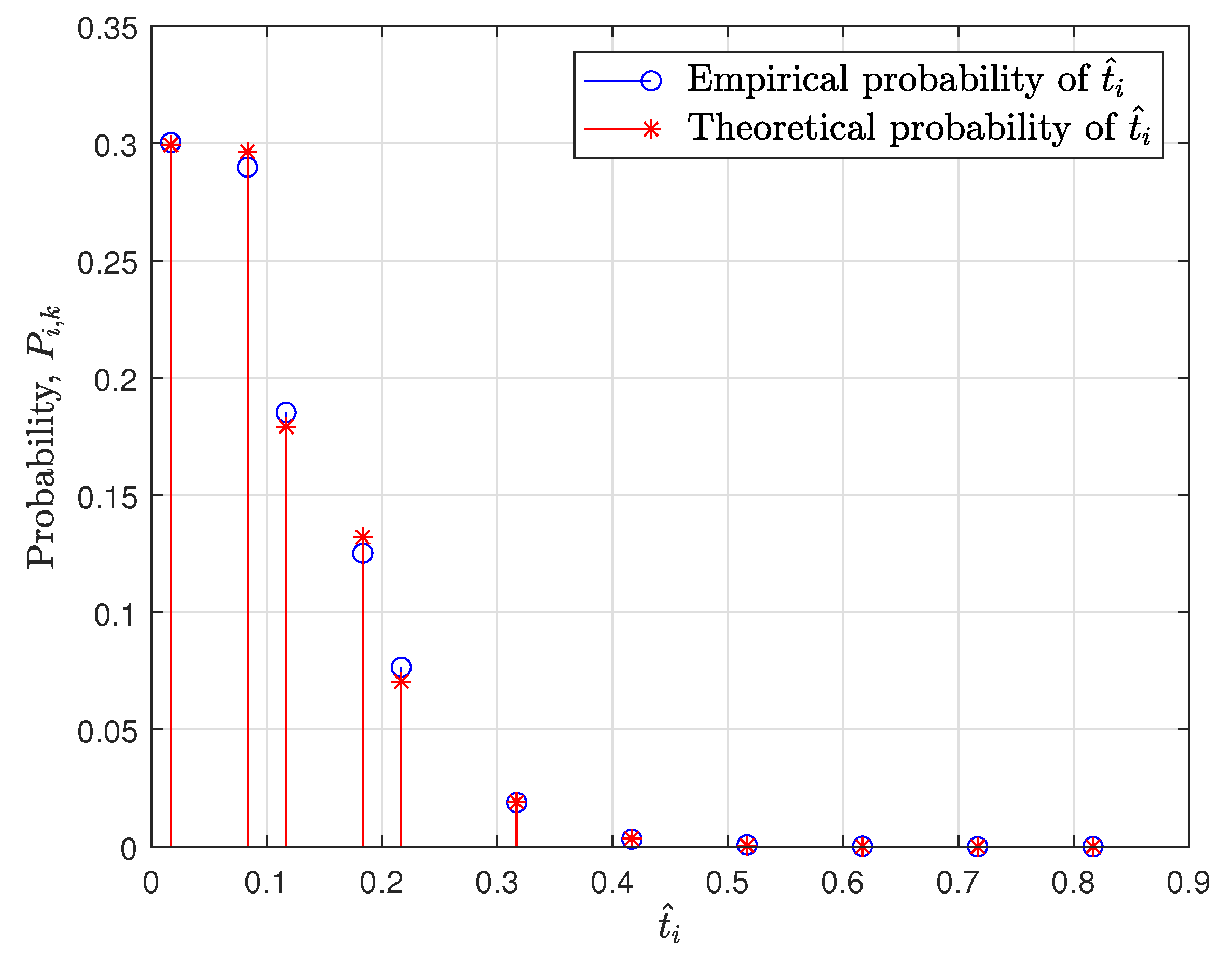
Figure 3 shows the empirical and theoretical probabilities of where and ten samples are considered for the simulation above. It is clearly observed that the probabilities are well-matched.
5. Computation of Weight
As mentioned in the first section, the probabilities of the differences between the two CCDFs are not equally weighted to determine the presence of impulsive noise. Unlike the conventional K–S test, it is very important to give different weights for all of the received samples according to the difference in CCDF in our proposed algorithm. Therefore, it is significant to capture the CCDF difference more clearly between noise models. Impulsive noise is characterized by heavy-tails, which shows non-linearity in and log scales. Whereas, AWGN is shown as linearity in scales. Thus, we use a CCDF of scale and log scale to calculate the weights using these differences.
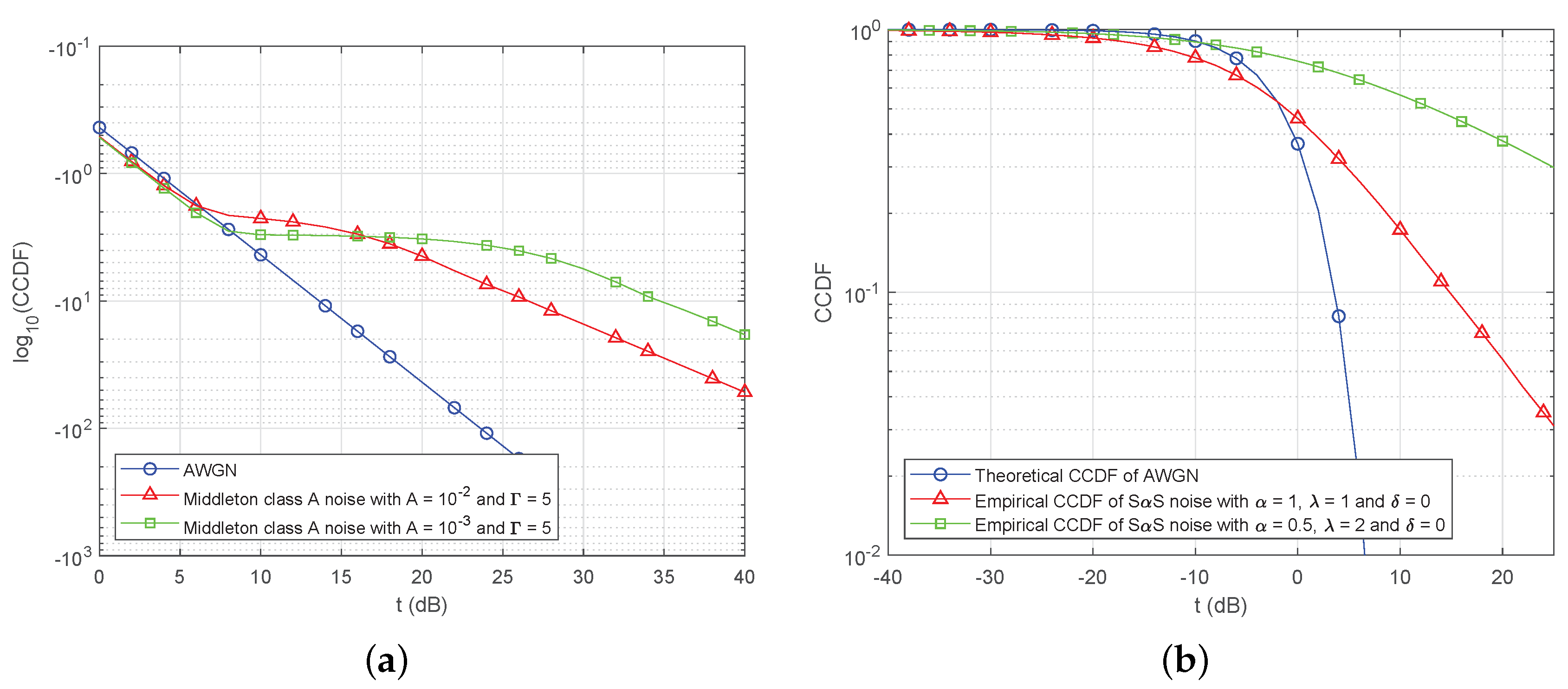
The weight for the proposed test is computed based on distributions of the noise. There are two noise models in terms of the distributions: Middleton class A noise and SS noise models. Thus, we introduce the two weights for the impulsive noise models, respectively. First, Middleton class A noise model is considered. Let us assume that the parameters of noise model are not estimated, because the parameter estimation is carried out after detecting the presence of impulsive noise. Without the values of the parameters, it is impossible to do an exact calculation of the weight. Thus, a graphical approach of Middleton class A noise distribution is used based on the characteristics. Figure 4a illustrates CCDFs for a Middleton class A noise model and AWGN. The scale of the y-axis in Figure 4a shows an obvious difference between CCDFs of Middleton class A noise model and AWGN since the background component of Middleton class A noise and AWGN are illustrated as a straight line in the scale of y-axis in Figure 4a. The straight line can be used in order to compute a weight. Thus, the weight for becomes
Second, let us consider SS noise model. Figure 4b shows CCDFs for SS noise and AWGN. The CCDFs of SS noise are plotted on log scale due to the fact that a slope of the CCDF is constant whereas the CCDF of AWGN is sharply decreasing in Figure 4b. Once the impulsiveness gets stronger, the linear curve with a constant slope of the CCDF gets higher. Owing to the linear curve in large amplitude, the logarithm function is suitable for giving more weight on a large amplitude due to the extremely low CCDF of AWGN. Since the difference of CCDFs between AWGN and SS noise is remarkable on log-scale, for SS noise, the weight of is
By substituting (18) and (19) into in (14), weight sums and respectively corresponding to and are computed. Then, the hypothesis in (11) is determined by computing with . For detecting the presence of impulsive noise, two weight sums are simultaneously used.
Finally, based on (14), (15), (18), and (19), the proposed algorithm for the test is stated in Algorithm 1.
| Algorithm 1 Proposed test |
 |
In Algorithm 1, is a set of . The procedure is briefly explained along with the line numbers corresponding to each step as follows:
- 1.
- Initialization. Before the test, all CCDF differences on are computed (line 1).
- 2.
- 3.
- and are computed by multiplying in lines 2–4 and the weights and , respectively (line 5–6).
- 4.
- Then, and are compared with that is a threshold to determine if hypothesises are accepted or rejected (lines 7–11).
Approximation of Threshold for the Proposed Test
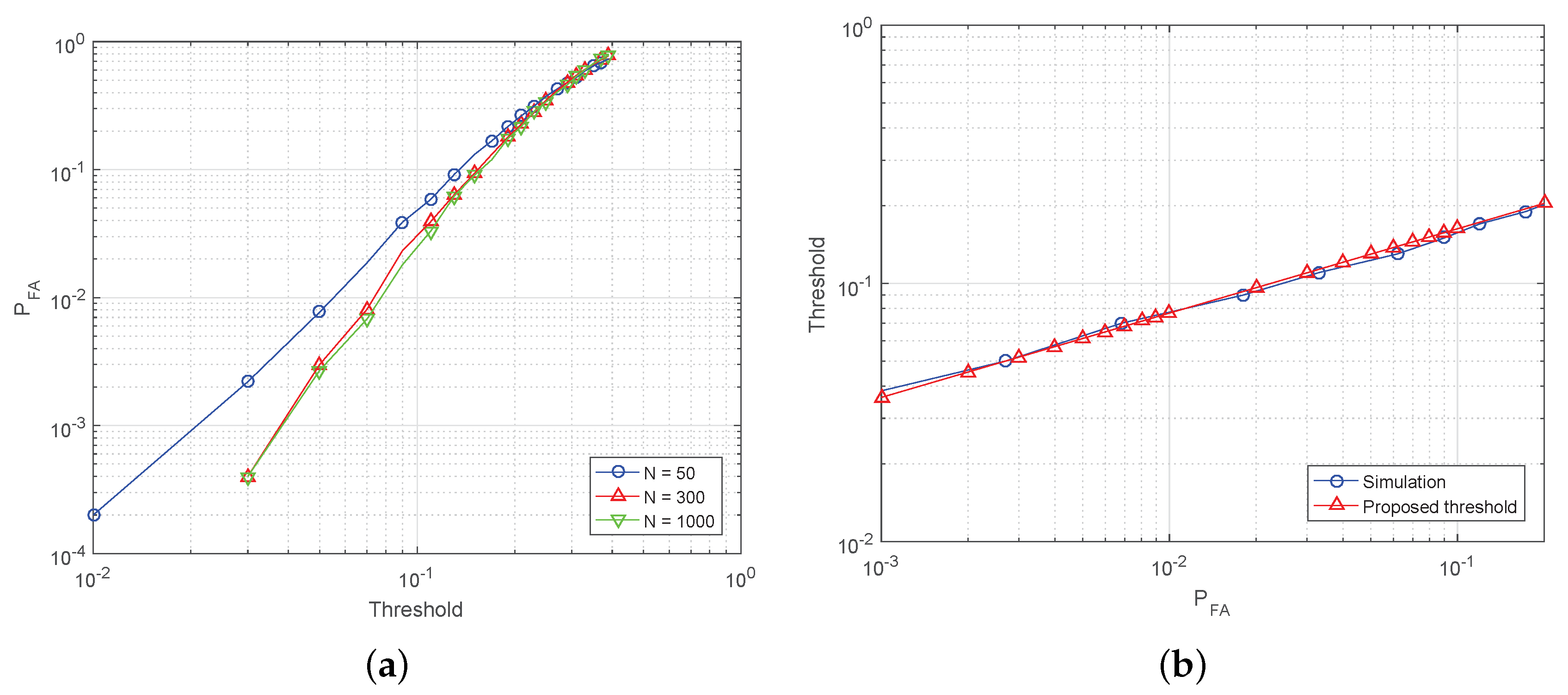
The test to detect the presence of impulsive noise is proposed in the above subsection. However, a threshold to satisfy a target is not defined. Thus, the threshold to satisfy is derived. The threshold of the proposed test is approximated due to its complexity. To approximate the threshold, the asymptotic performance of the proposed test is analyzed. Figure 5a shows with 50, 300 and 1000 to show asymptotic performance of the test. It is clear that the false alarm probability of the proposed test is improved with a higher N but there is no considerable improvement when the number of samples N exceeds 1000. Therefore, we can obtain the approximation of the threshold on the in N = 1000. Value of the threshold in the range between 0.05 to 0.2 is considered in Figure 5a, because the curve in Figure 5a can be modelled as a linear curve. The x-axis and y-axis of the curve are log-scaled in Figure 5a and the relation between log-scaled x-axis and y-axis becomes
where a is a slope of the linear function and b is a y-intercept. Thus, the relation between and threshold in Figure 5a is given as
To determine a and b, two pairs of are required and Table 1 shows the pairs obtained from simulation results. Once the two pairs of are considered, a is computed as
Also, b is obtained as
Therefore, the threshold is determined as
6. Results and Discussion
In this section, simulation results are provided to evaluate the performance of the proposed test methodology, especially the miss detection probability performance for classification an impulsive noise model under various false alarm probability. For the extensive simulation, the false alarm probability is given as
and the miss detection probability is shown as
where is the detection probability.
For simulations, complex impulsive noise samples are generated based on the Middleton class A model in (2) and SS model in (4), respectively, where the real and the imaginary components are dependent and uncorrelated. For the Middleton class A, the model is characterized by the parameters A and such that the impulsiveness of the noise can be represented with A and . When A is increasing, Middleton class A noise becomes more likely to be Gaussian noise and, conversely, a low value of A represents highly structured impulsive noise especially when and [26,27]. Therefore, in order to effectively compare the performance of the proposed test method, we set A and to 0.01 and 5, respectively, for the impulsive noise model. The SS model is characterized by the parameter , and if the value of is small that implies the stronger the impulsive property. In general, the value of falls into between 1 and 2 in a practical environment [28]. Thus, we consider the SS model with equals to 1.8 in this paper.
Receiver operating characteristic (ROC) analysis is widely used in signal processing and communications systems to evaluate the detection performance, where it exploits two-dimensional curves plotted by detection probability against false alarm probability [29]. Note that we adopt the as a performance metric instead of , thus the ROC curve is represented with and , in this paper.
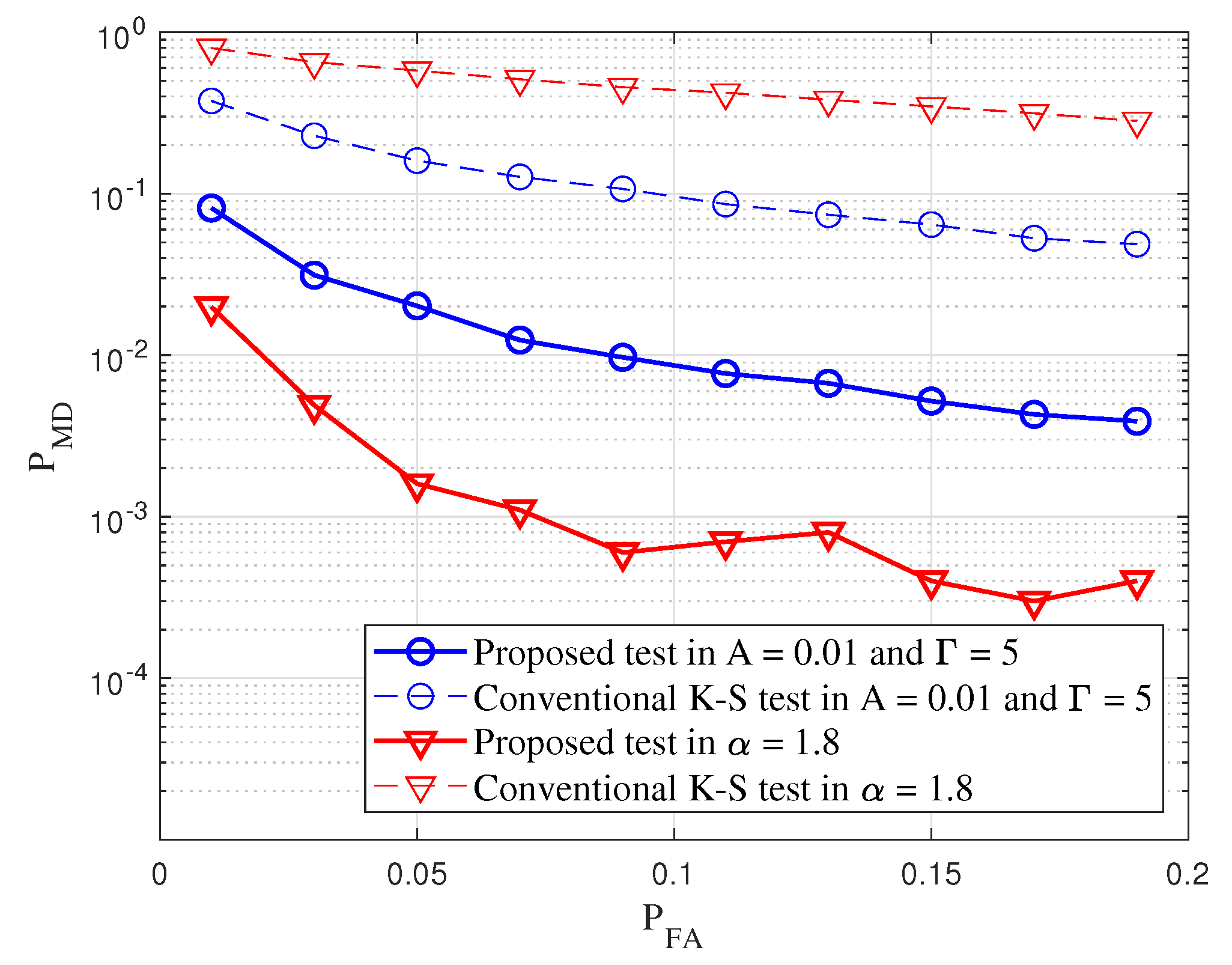
Figure 6 shows a comparison of of the conventional K–S test and the proposed test in Middleton class A noise with respect to false alarm probability where the number of observed samples are 500. Here, it was observed that the proposed test has a lower miss detection probability than the K–S test in the various impulsive noise environments. In particular, it can be easily observed that the proposed test outperforms the K–S test by providing approximately 30% lower miss detection probability at a for the Middleton class A noise environment. Furthermore, in the case of SS noise model, the CCDF of the impulsive noise model is similar to the Gaussian noise. It means that the difference of CCDF of those is not considered at any . Thus, the detection performance of the conventional K–S test to SS is poor. Note that the K–S test has a higher miss detection probability under various false alarm probability because the K–S test does not enough capture the characteristics of impulsive noise compared with the proposed test. On the other hand, compared with the K–S test in the SS noise model, the miss detection probability gain of the proposed test over the K–S test is significant even at low false alarm probability.
In summary, the conventional K–S test uses the maximum difference between CCDFs of received samples and the assumed distribution when the distribution of received samples follows the distribution of impulsive noise. However, the maximum difference may correspond to Gaussian component that is not the characteristic of impulsive noise when an impulsive property is stronger. Unlike the conventional K–S test, the proposed test considers all amplitudes of the received samples and computes differences of CCDFs between the assumed distribution and the received samples. Besides, the proposed test improves the classification performance by utilizing the characteristics of impulsive noise that it gives more weight to amplitudes corresponding to the characteristics of impulsive noise than weight for the other amplitudes corresponding to the Gaussian component. Through the simulation results, it was confirmed that the performance of our proposed method was improved by at least 28% and 87% for Middleton class A and SS models, respectively, compared to the existing conventional K–S test performance.
7. Conclusions
This paper proposes a test to detect the presence of impulsive noise. The proposed method is designed based on a weighted sum of all differences between CCDFs using thresholds. To improve detection performance, different weights are proposed according to the Middleton class A and SS model, respectively. Finally, a threshold to satisfy target false alarm probability is obtained by analyzing an asymptotic false alarm probability. In particular, a significant highlight of our proposed test method is that it operates on a high detection probability with low false alarm probability; it can be used in various cellular networks, for example, a vehicular network where an impulsive noise exists.
Author Contributions
Conceptualization, H.O. and H.N.; Data creation and simulation, H.O.; Methodology, H.O., D.S. and H.N.; Simulation, H.O.; Writing—draft, H.O.; Writing—review and editing, D.S. and H.N. All authors have read and agreed to the published version of the manuscript.
Funding
This work was supported by the research fund of Signal Intelligence Research Center supervised by the Defense Acquisition Program Administration and the Agency for Defense Development of Korea.
Conflicts of Interest
The authors declare no conflict of interest.
Abbreviations
The following abbreviations are used in this manuscript:
| CCDF | Complementary distribution function |
| SS | Symmetric stable |
References
- Oh, H.; Nam, H.; Park, S. Adaptive Threshold Blanker in an Impulsive Noise Environment. IEEE Trans. Electromagn. Compat. 2014, 56, 1045–1052. [Google Scholar] [CrossRef]
- Saleh, T.S.; Marsland, I.; El-Tanany, M. Suboptimal Detectors for Alpha-Stable Noise: Simplifying Design and Improving Performance. IEEE Trans. Commun. 2012, 60, 2982–2989. [Google Scholar] [CrossRef]
- Patra, M.; Thakur, R.; Murthy, C.S.R. Improving Delay and Energy Efficiency of Vehicular Networks Using Mobile Femto Access Points. IEEE Trans. Veh. Technol. 2017, 66, 1496–1505. [Google Scholar] [CrossRef]
- Rožić, N.; Banelli, P.; Begušić, D.; Radić, J. Multiple-threshold Estimators for Impulsive Noise Suppression in Multicarrier Communications. IEEE Trans. Signal Process. 2018, 66, 1619–1633. [Google Scholar] [CrossRef]
- Ma, J.; Qiu, T. Automatic Modulation Classification using Cyclic Correntropy Spectrum in Impulsive Noise. IEEE Commun. Lett. 2018, 8, 440–443. [Google Scholar] [CrossRef]
- Oh, H.; Nam, H. Design and Performance Analysis of Nonlinear Preprocessors in an Impulsive Noise Environment. IEEE Trans. Veh. Technol. 2016, 66, 364–376. [Google Scholar] [CrossRef]
- Jiang, S.; Beaulieu, N.C. Precise BER Computation for Binary Data Detection in Bandlimited White Laplace Noise. IEEE Trans. Commun. 2011, 59, 1570–1579. [Google Scholar] [CrossRef]
- Pena, D.; Lima, C.; Dória, M.; Pena, L.; Martins, A.; Sousa, V. Acoustic Impulsive Noise based on Non-gaussian Models: An Experimental Evaluation. Sensors 2019, 19, 2827. [Google Scholar] [CrossRef] [Green Version]
- Satar, B.; Soysal, G.; Jiang, X.; Efe, M.; Kirubarajan, T. Robust Weighted l1,2 Norm Filtering in Passive Radar Systems. Sensors 2020, 11, 3270. [Google Scholar] [CrossRef]
- Bai, L.; Tucci, M.; Barmada, S.; Raugi, M.; Zheng, T. Impulsive Noise Characterization in Narrowband Power Line Communication. Energies 2018, 11, 863. [Google Scholar] [CrossRef] [Green Version]
- Kuai, X.; Sun, H.; Zhou, S.; Cheng, E. Impulsive Noise Mitigation in Underwater Acoustic OFDM Systems. IEEE Trans. Veh. Technol. 2016, 65, 8190–8202. [Google Scholar] [CrossRef]
- Mariscotti, A.; Marrese, A.; Pasquino, N. Time and Frequency Characterization of Radiated Disturbances in telecommunication Bands due to Pantograph Arcing. In Proceedings of the IEEE Instrumentation and Measurement Technology Conference (I2MTC), Graz, Austria, 13–16 May 2012. [Google Scholar]
- Pous, M.; Azpurua, M.A.; Silve, F. Radiated Transient Interferences Measurement Procedure To Evaluate Digital Communication Systems. In Proceedings of the IEEE International Symposium on Electromagnetic Compatibility EUROPE (EMC EUROPE), Dresden, Germany, 16–22 August 2015. [Google Scholar]
- Pous, M.; Silve, F. APD Radiated Transient Measurements Produced by Electric Sparks Employing Time-domain Captures. In Proceedings of the IEEE International Symposium on Electromagnetic Compatibility EUROPE (EMC EUROPE), Gothenburg, Sweden, 1–4 September 2014. [Google Scholar]
- Pous, M.; Azpurua, M.A.; Silve, F. APD Oudoors Time-Domain Measurements for Impulsive Noise characterization. In Proceedings of the IEEE International Symposium on Electromagnetic Compatibility EUROPE (EMC EUROPE), Angers, France, 4–7 September 2017. [Google Scholar]
- Dudoyer, S.; Deniau, V.; Ambellouis, S.; Heddebaut, M.; Mariscotti, A. Classification of Transient EM Noises Depending on their Effect on the Quality of GSM-R Reception. IEEE Trans. Electromag. Compat. 2013, 55, 867–874. [Google Scholar] [CrossRef]
- Deniau, V.; Dudoyer, S.; Ambellouis, S.; Heddebaut, M.; Mariscotti, A. Research of observables adapted to the analysis of EM noise impacting the quality of GSM-Railway transmissions. In Proceedings of the IEEE International Symposium on Electromagnetic Compatibility EUROPE (EMC EUROPE), Rome, Italy, 17–21 September 2012. [Google Scholar]
- Wang, F.; Wang, X. Fast and Robust Modulation Classification via Kolmogorov–Smirnov Test. IEEE Trans. Commun. 2010, 58, 2234–2332. [Google Scholar] [CrossRef]
- Mohammadkarimi, M.; Dobre, O.A. Blind Identification of Spatial Multiplexing and Alamouti Space-time Block Code via Kolmogorov–Smirnov (K–S) test. IEEE Commun. Lett. 2014, 19, 1568–1571. [Google Scholar] [CrossRef]
- Zhang, G.; Wang, X.; Liang, Y.; Liu, J. Fast and Robust Spectrum Sensing via Kolmogorov–Smirnov Test. IEEE Trans. Commun. 2010, 58, 3410–3416. [Google Scholar] [CrossRef]
- Fu, Y.; Zhu, J.; Wang, S.; Xi, Z. Reduced Complexity SNR Estimation via Kolmogorov–Smirnov Test. IEEE Commun. Lett. 2015, 19, 1568–1571. [Google Scholar] [CrossRef]
- Biu, E.O.; Nwakuya, M.T.; Wonu, N. Detection of Non-Normality in Data Sets and Comparison between Different Normality Tests. Asian J. Probab. Stat. 2020, 5, 1–20. [Google Scholar] [CrossRef]
- Cortés, J.A.; Sanz, A.; Estopinán, P.; García, J.I. On the suitability of the Middleton class A noise model for narrowband PLC. In Proceedings of the IEEE International Symposium on Power Line Communications and its Applications (ISPLC), Bottrop, Germany, 20–23 March 2016. [Google Scholar]
- Marsaglia, G.; Tsang, W.W.; Wang, J. Evaluating Kolmogorov’s Distribution. J. Stat. Softw. 2003, 8, 1–4. [Google Scholar] [CrossRef]
- Ahad, N.A.; Yin, T.S.; Othman, A.R.; Yaacob, C.R. Sensitivity of Normality Tests to Non-normal Data. Sains Malays. 2011, 40, 637–641. [Google Scholar]
- Matsumoto, Y.; Gotoh, K.; Wiklundh, K. Band-limitation effect on statistical properties of class—A interference. In Proceedings of the IEEE International Symposium on Electromagnetic Compatibility EUROPE (EMC EUROPE), Hamburg, Germany, 8–12 September 2008. [Google Scholar]
- Fors, K.M.; Wiklundh, K.C.; Stenumgaard, P.F. On the impulsiveness correction factor for estimation of performance degradation of wireless systems in Middleton’s class A interference. In Proceedings of the IEEE International Symposium on Electromagnetic Compatibility (EMC), Rome, Italy, 17–21 September 2012. [Google Scholar]
- Fan, L.; Li, X.; Lei, X.; Li, W.; Gao, F. On distribution of SαS noise and its application in performance analysis for linear rake receivers. IEEE Commun. Lett. 2011, 16, 186–189. [Google Scholar] [CrossRef]
- Chang, C. Multiparameter receiver operating characteristic analysis for signal detection and classification. IEEE Sens. J. 2010, 10, 423–442. [Google Scholar] [CrossRef]
Figure 1.
BER of BPSK in various noise environment such as AWGN, Middleton class A noise and SS noise. Middleton class A noise parameters are set to and SS noise parameter is set to .
Figure 1.
BER of BPSK in various noise environment such as AWGN, Middleton class A noise and SS noise. Middleton class A noise parameters are set to and SS noise parameter is set to .

Figure 2.
Plotting empirical CCDF with unknown distribution, theoretical CCDFs of complex Gaussian distribution and the differences between them on for the proposed test. N is the number of the received samples. is the theoretical CCDF on under the hypothesis. is the differences between empirical and theoretical CCDFs on .
Figure 2.
Plotting empirical CCDF with unknown distribution, theoretical CCDFs of complex Gaussian distribution and the differences between them on for the proposed test. N is the number of the received samples. is the theoretical CCDF on under the hypothesis. is the differences between empirical and theoretical CCDFs on .

Figure 3.
Plotting empirical probability with complex Gaussian distributed samples and theoretical probability by (17) on . is 0.45 and . For simulation, N equals to 10.
Figure 3.
Plotting empirical probability with complex Gaussian distributed samples and theoretical probability by (17) on . is 0.45 and . For simulation, N equals to 10.

Figure 4.
Illustration of theoretical CCDF of AWGN and empirical CCDFs of impulsive noise models. (a) Theoretical s of AWGN and Middleton class A noise with = and on a log scale. (b) Theoretical CCDF of AWGN and empirical CCDFs of SS noise with = (1,1,0) and (0.5,2,0) on a log scale.
Figure 4.
Illustration of theoretical CCDF of AWGN and empirical CCDFs of impulsive noise models. (a) Theoretical s of AWGN and Middleton class A noise with = and on a log scale. (b) Theoretical CCDF of AWGN and empirical CCDFs of SS noise with = (1,1,0) and (0.5,2,0) on a log scale.

Figure 5.
Illustration of theoretical CCDF of AWGN and empirical CCDFs of impulsive noise models. (a) Plotting threshold versus in 50, 300 and 1000. (b) Plotting versus simulation results of threshold in 1000 and derived threshold in (25).
Figure 5.
Illustration of theoretical CCDF of AWGN and empirical CCDFs of impulsive noise models. (a) Plotting threshold versus in 50, 300 and 1000. (b) Plotting versus simulation results of threshold in 1000 and derived threshold in (25).

Figure 6.
Comparison of of the proposed test and the conventional K–S test in various impulsive noise environment. The parameter of Middleton class A noise is and . Those of SS noise equals to , , and . N equals to 500.
Figure 6.
Comparison of of the proposed test and the conventional K–S test in various impulsive noise environment. The parameter of Middleton class A noise is and . Those of SS noise equals to , , and . N equals to 500.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 1.
Two pairs of in .
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Oh, H.; Seo, D.; Nam, H. Design of a Test for Detecting the Presence of Impulsive Noise. Sensors 2020, 20, 7135. https://doi.org/10.3390/s20247135
AMA Style
Oh H, Seo D, Nam H. Design of a Test for Detecting the Presence of Impulsive Noise. Sensors. 2020; 20(24):7135. https://doi.org/10.3390/s20247135
Chicago/Turabian StyleOh, Hyungkook, Dongho Seo, and Haewoon Nam. 2020. "Design of a Test for Detecting the Presence of Impulsive Noise" Sensors 20, no. 24: 7135. https://doi.org/10.3390/s20247135
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.