Mechanical Design and Kinematic Modeling of a Cable-Driven Arm Exoskeleton Incorporating Inaccurate Human Limb Anthropomorphic Parameters


Abstract
:1. Introduction
2. Biological Structure of the Upper-Limb
2.1. The Irregularity of the Upper-Limb Kinematics
2.2. The Irregularity of the Upper-Limb Contour
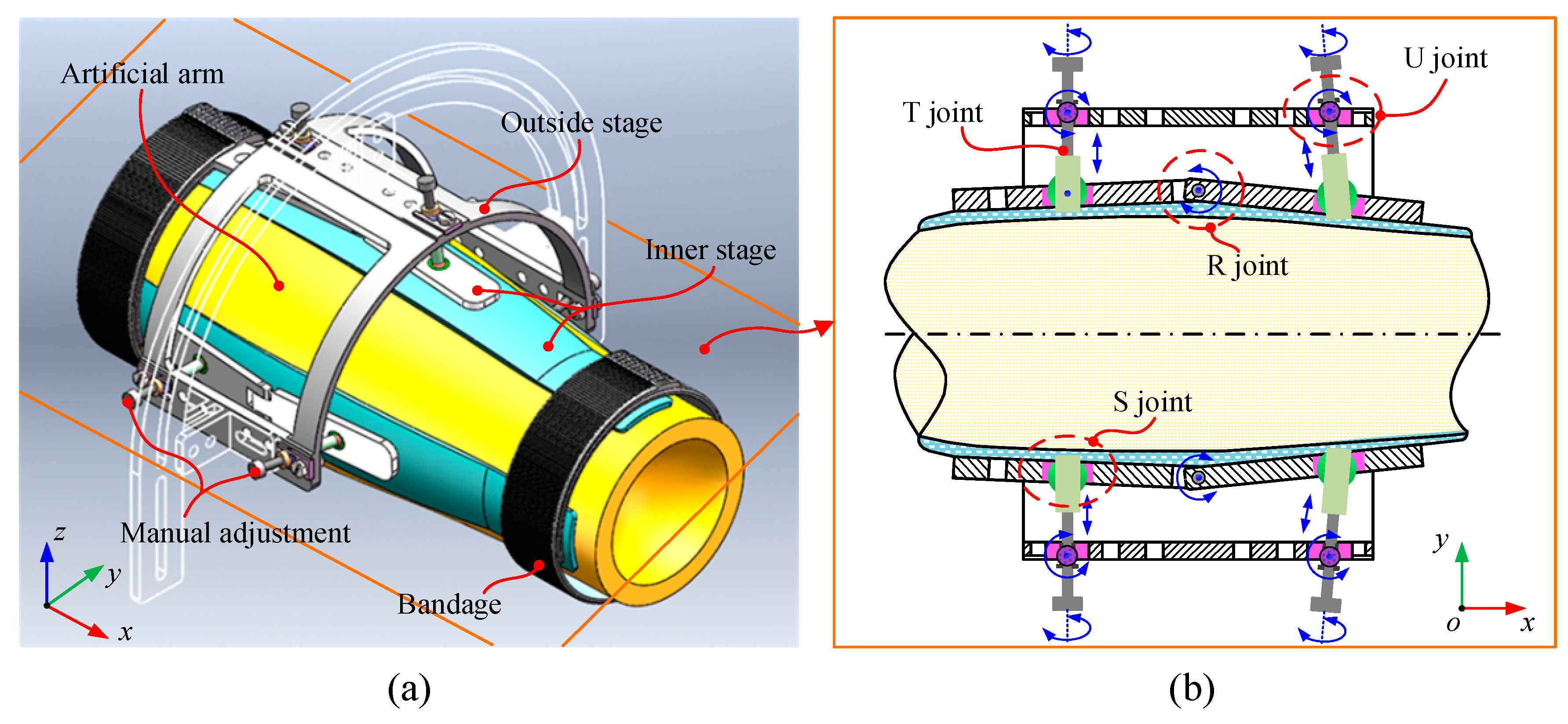
3. Mechanical Design
4. Kinematic Modeling and Identification
4.1. Kinematic Modeling
- (1)
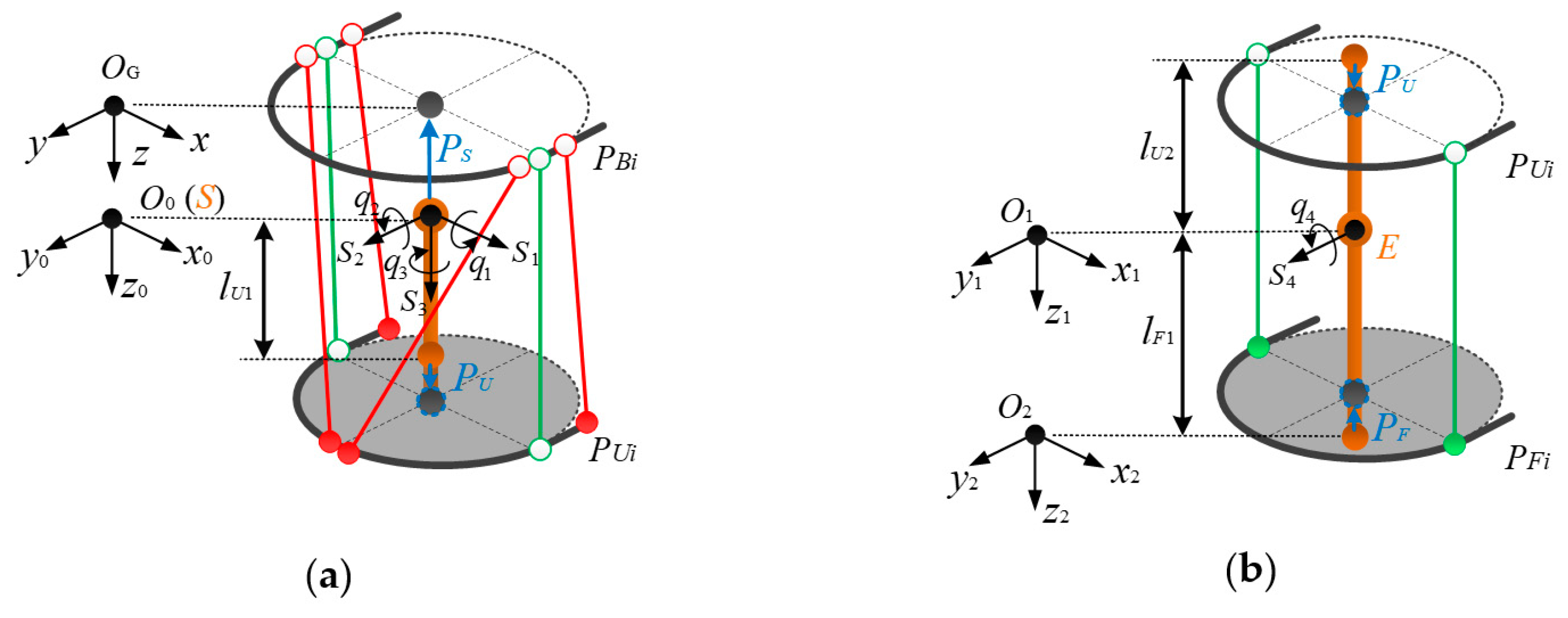
- Kinematics of human arm skeleton: The arm skeleton can be regarded as a serial open-chain mechanism. In Figure 2, the screw coordinates of the four arm joints in the global frame are denoted as . The joint rotations are denoted as . According to the POE formula, the nominal end pose can be obtained as:It should be noted that the irregular structure of the upper limb joints gives rise to position deviations of screw coordinates . Herein, the deviation between the frame and frame caused by shoulder joint center motion is denoted as , while that between the frame and frame caused by elbow joint center motion is denoted as . The effects of and on the homogeneous transformation matrices between the frames and can be written as:Taking Equation (2) into consideration, Equation (1) is modified as
- (2)
- Kinematics of cable-driven modules: In Figure 2, the shoulder and elbow modules can be regarded as cable-driven parallel platforms, in which the moving platforms rotates around the shoulder and elbow joints relative to the base platform. Based on the cable-routing structure, the kinematics of the human arm skeleton and the attachment positions of the exoskeleton on the upper limb, the kinematic relationship between the human arm joint rotations and the motor outputs can be determined.
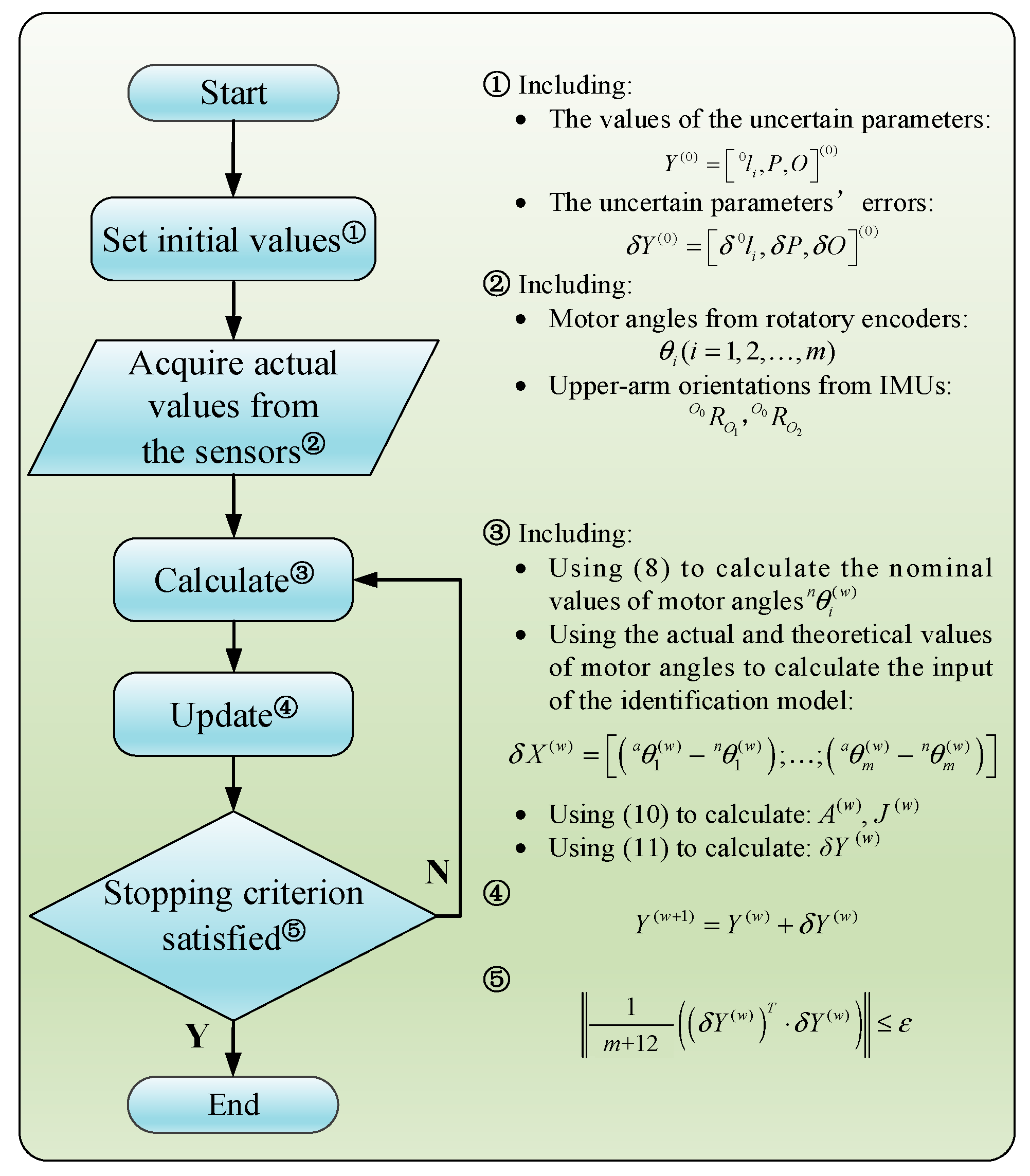
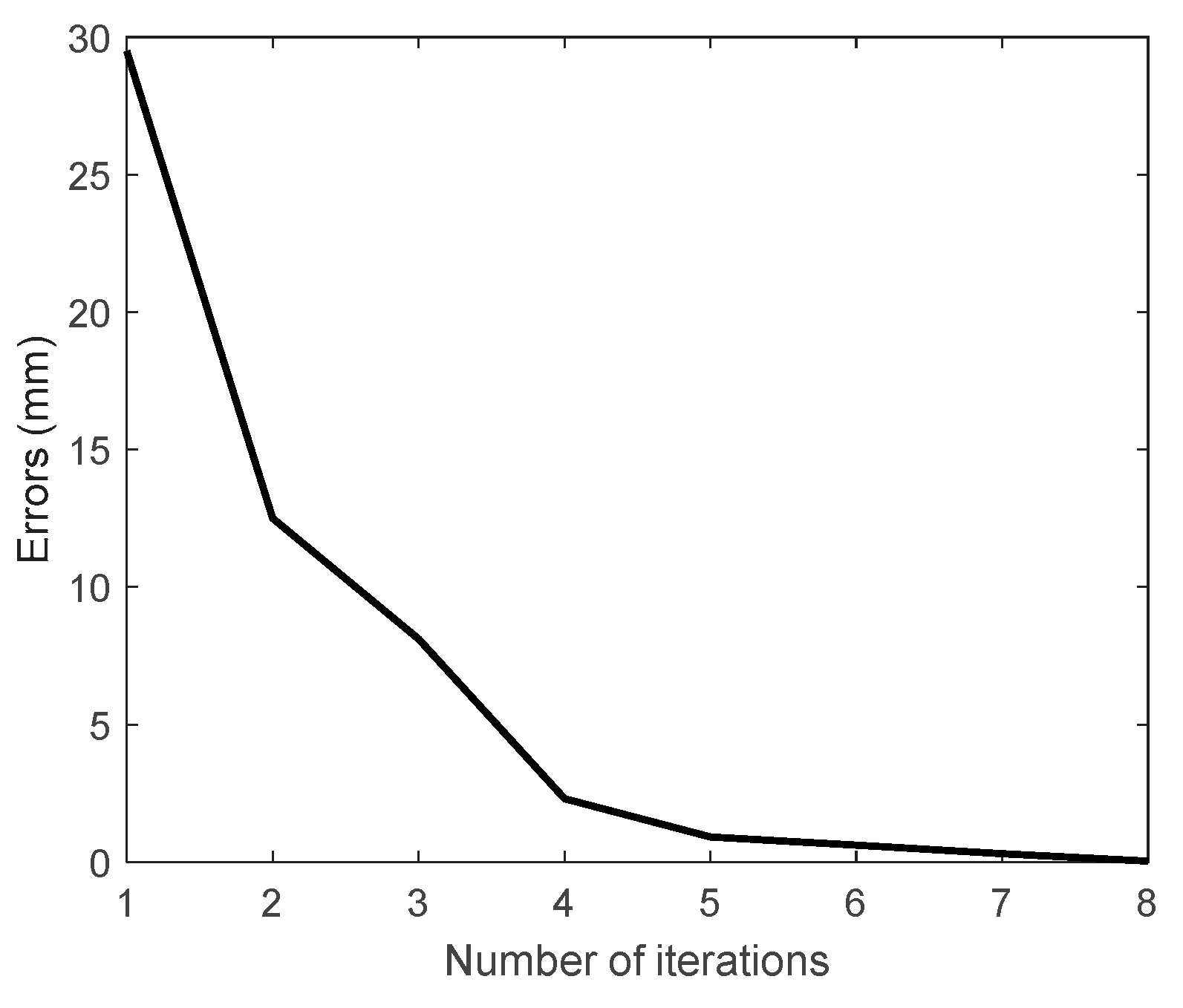
4.2. Kinematic Identification
5. Experiments
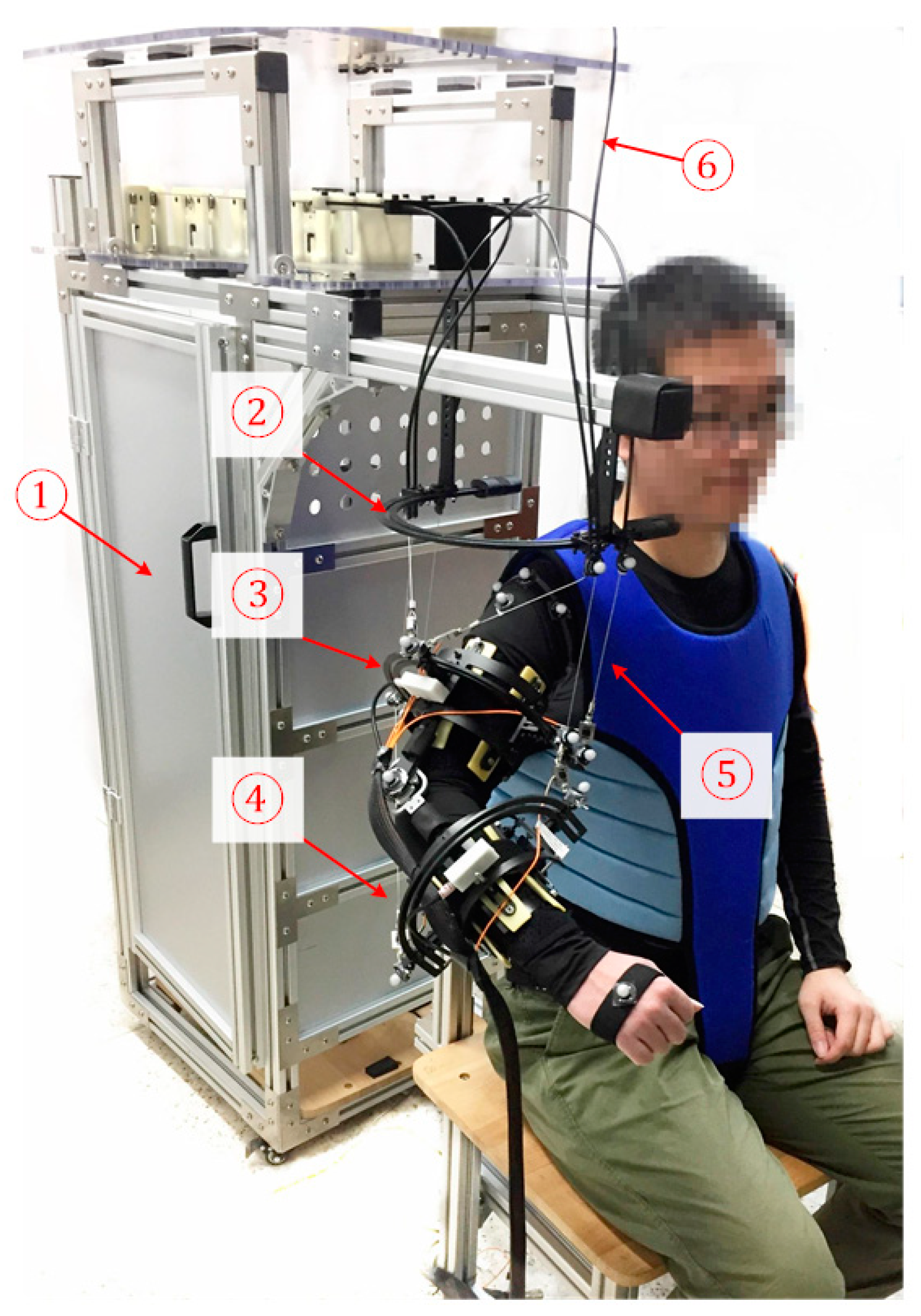
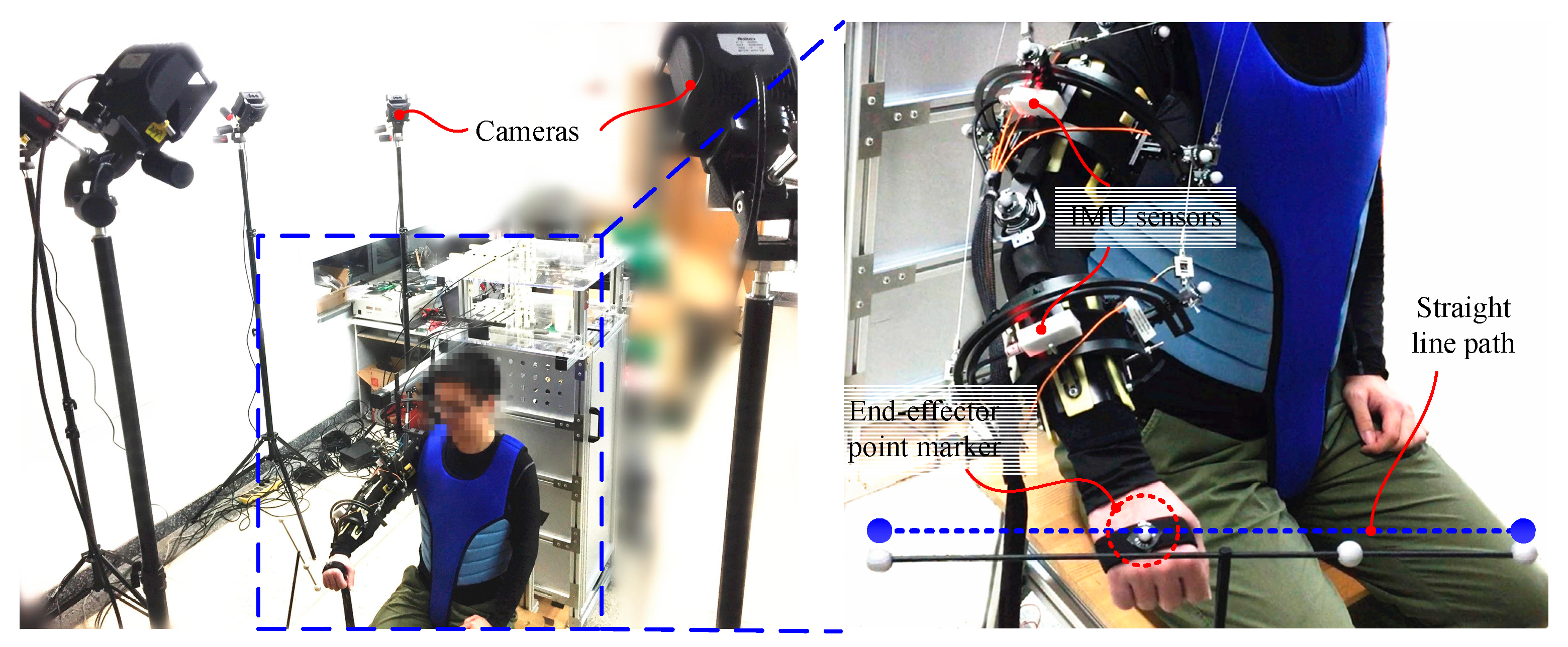
5.1. Experiment Setup
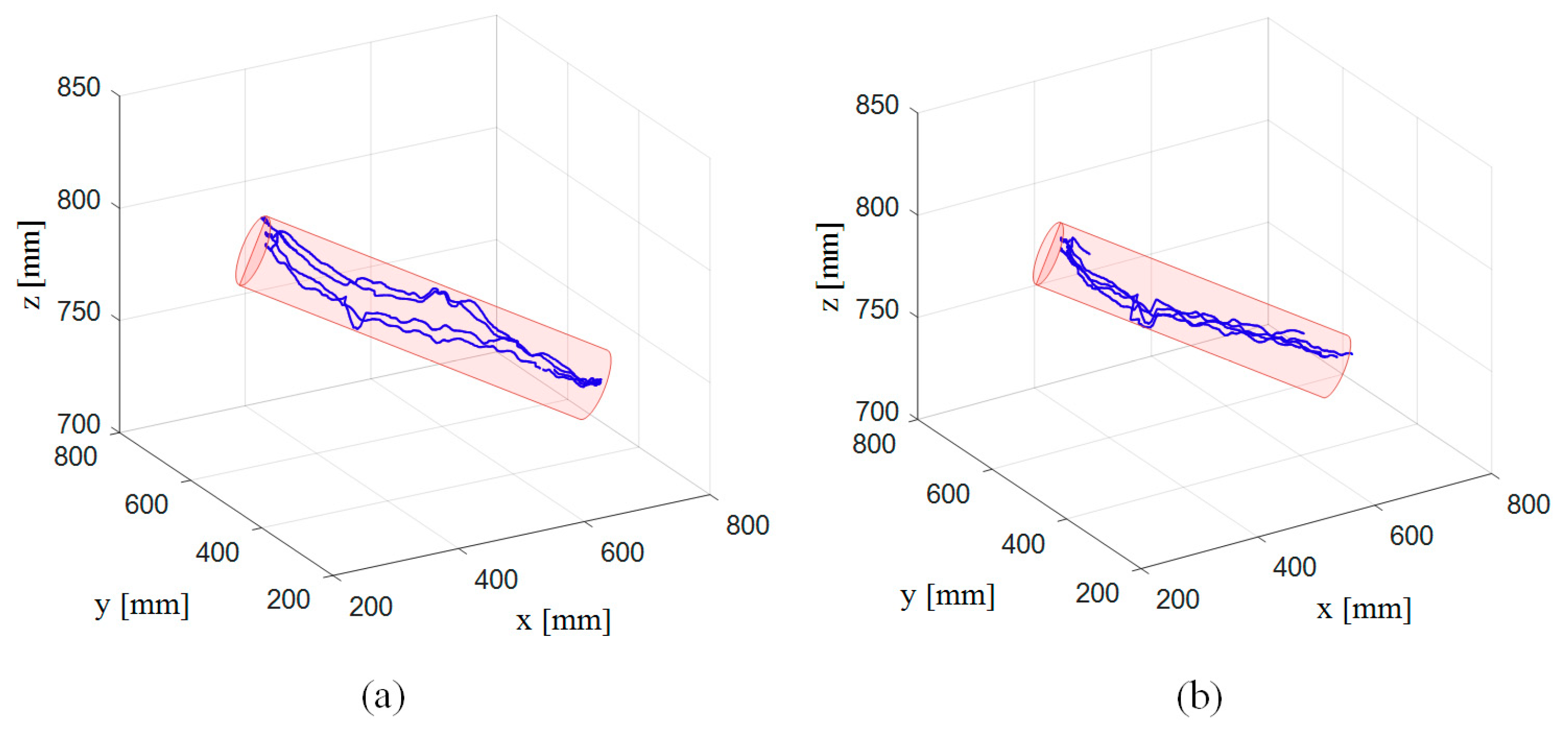
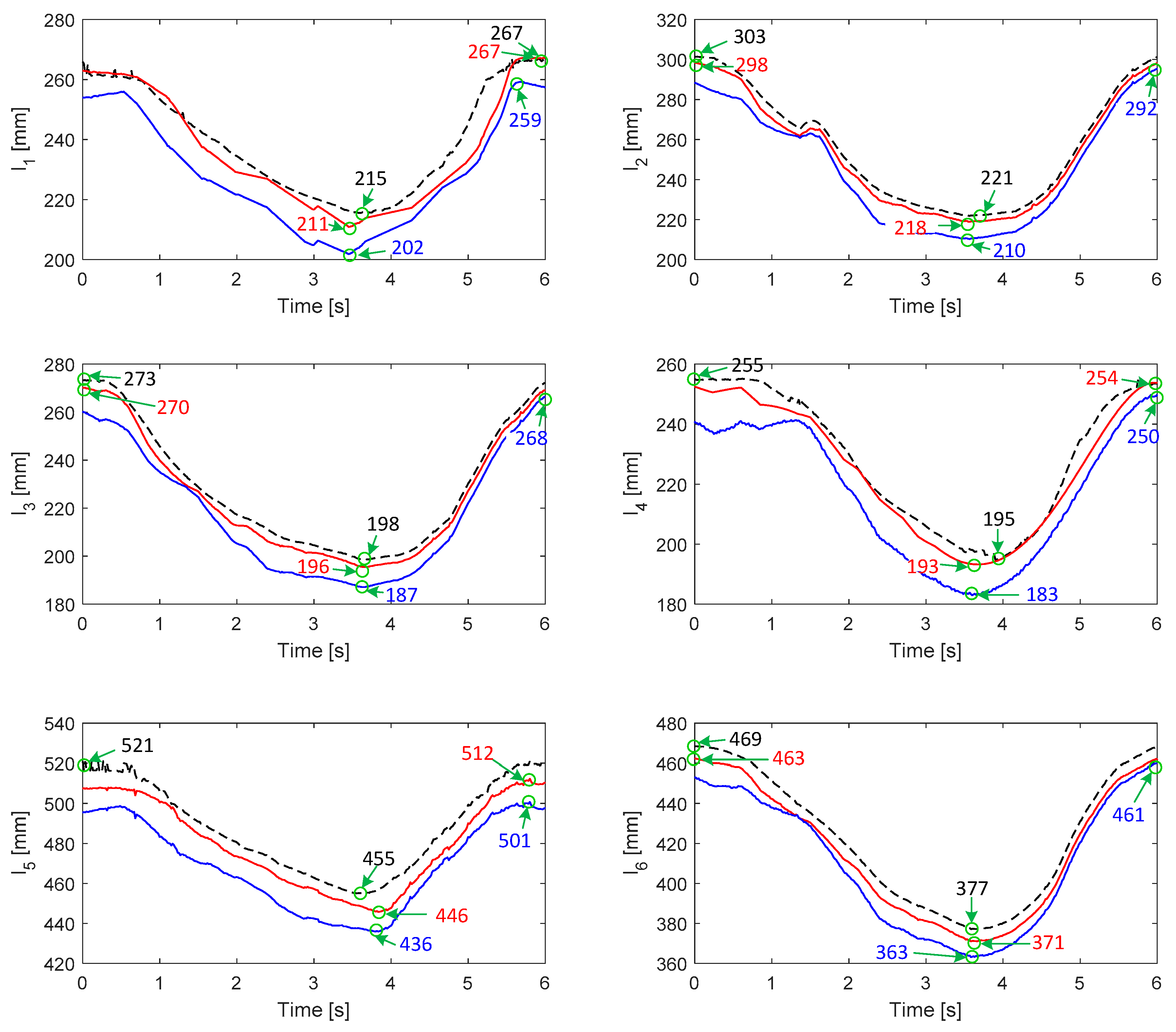
5.2. Experiment Results
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A
References
- Hogan, N.; Krebs, H.I.; Charnnarong, J.; Srikrishna, P.; Sharon, A. MIT-MANUS: A workstation for manual therapy and training. In Proceedings of the IEEE International Workshop on Robot and Human Communication, Tokyo, Japan, 1–3 September 1992; pp. 161–165. [Google Scholar]
- Kahn, L.E.; Rymer, W.Z.; Reinkensmeyer, D.J. Adaptive assistance for guided force training in chronic stroke. In Proceedings of the 26th Annual International Conference of the IEEE Engineering in Medicine and Biology Society, San Francisco, CA, USA, 1–5 September 2004; pp. 2722–2725. [Google Scholar]
- Lum, P.S.; Burgar, C.G.; Van Der Loos, H.M.; Shor, P.C.; Majmundar, M.; Yap, R. MIME robotic device for upper-limb neurorehabilitation in subacute stroke subjects: A follow-up study. J. Rehabil. Res. Dev. 2006, 43, 631. [Google Scholar] [CrossRef] [PubMed]
- Nef, T.; Guidali, M.; Riener, R. ARMin III—Arm Therapy Exoskeleton with an Ergonomic Shoulder Actuation. Appl. Bionics Biomech. 2009, 6, 127–142. [Google Scholar] [CrossRef]
- Calabrò, R.S.; Russo, M.; Naro, A.; Milardi, D.; Balletta, T.; Leo, A.; Filoni, S.; Bramanti, P. Who May Benefit from Armeo Power Treatment? A Neurophysiological Approach to Predict Neurorehabilitation Outcomes. PM&R 2016, 8, 971–978. [Google Scholar]
- Carignan, C.; Liszka, M.; Roderick, S. Design of an arm exoskeleton with scapula motion for shoulder rehabilitation. In Proceedings of the ICAR ’05, 12th International Conference on Advanced Robotics, Seattle, WA, USA, 18–20 July 2005; pp. 524–531. [Google Scholar]
- Perry, J.C.; Rosen, J.; Burns, S. Upper-Limb Powered Exoskeleton Design. IEEE/ASME Trans. Mechatron. 2007, 12, 408–417. [Google Scholar] [CrossRef]
- Veneman, J.; Kruidhof, R.; Hekman, E.; Ekkelenkamp, R.; Van Asseldonk, E.; Van Der Kooij, H. Design and Evaluation of the LOPES Exoskeleton Robot for Interactive Gait Rehabilitation. IEEE Trans. Neural Syst. Rehabil. Eng. 2007, 15, 379–386. [Google Scholar] [CrossRef] [Green Version]
- Banala, S.K.; Kim, S.H.; Agrawal, S.K.; Scholz, J.P. Robot Assisted Gait Training with Active Leg Exoskeleton (ALEX). IEEE Trans. Neural Syst. Rehabil. Eng. 2009, 17, 2–8. [Google Scholar] [CrossRef]
- Vitiello, N.; Lenzi, T.; Roccella, S.; De Rossi, S.M.; Cattin, E.; Giovacchini, F.; Vecchi, F.; Carrozza, M. NEUROExos: A powered elbow exoskeleton for physical rehabilitation. IEEE Trans. Robot. 2013, 29, 220–235. [Google Scholar] [CrossRef]
- Christensen, S.; Bai, S. Kinematic analysis and design of a novel shoulder exoskeleton using a double parallelogram linkage. J. Mech. Robot. 2018, 10, 041008. [Google Scholar] [CrossRef]
- Ergin, M.A.; Patoglu, V. ASSISTON-SE: A self-aligning shoulder-elbow exoskeleton. In Proceedings of the 2012 IEEE International Conference on Robotics and Automation, Saint Paul, MN, USA, 14–18 May 2012; pp. 2479–2485. [Google Scholar]
- Munawar, H.; Yalcin, M.; Patoglu, V. AssistOn-Gait: An overground gait trainer with an active pelvis-hip exoskeleton. In Proceedings of the 2015 IEEE International Conference on Rehabilitation Robotics (ICORR), Singapore, 11–14 August 2015; pp. 594–599. [Google Scholar]
- Thalagala, T.D.R.G.; Silva, S.D.K.C.; Maduwantha, L.K.A.H.; Ranaweera, R.K.P.S.; Gopura, R.A.R.C. A 4 DOF Exoskeleton Robot with a Novel Shoulder Joint Mechanism. In Proceedings of the IEEE/SICE International Symposium on System Integration, Sapporo, Japan, 13–15 December 2016; pp. 132–137. [Google Scholar]
- Schiele, A.; Van Der Helm, F.C.T. Kinematic Design to Improve Ergonomics in Human Machine Interaction. IEEE Trans. Neural Syst. Rehabil. Eng. 2006, 14, 456–469. [Google Scholar] [CrossRef] [PubMed]
- Yang, G.; Ho, H.L.; Chen, W.; Lin, W.; Yeo, S.H.; Kurbanhusen, M.S. A Haptic Device Wearable on a Human Arm. In Proceedings of the IEEE Conference on Robotics, Automation and Mechatronics, Singapore, 1–3 December 2004. [Google Scholar]
- Mao, Y.; Agrawal, S.K. Transition from mechanical arm to human arm with CAREX: A cable driven ARm EXoskeleton (CAREX) for neural rehabilitation. In Proceedings of the 2012 IEEE International Conference on Robotics and Automation, Saint Paul, MN, USA, 14–18 May 2012; pp. 2457–2462. [Google Scholar]
- Jin, X.; Cui, X.; Agrawal, S.K.; Agrawal, S.K. Design of a cable-driven active leg exoskeleton (C-ALEX) and gait training experiments with human subjects. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; pp. 5578–5583. [Google Scholar]
- Cui, X.; Chen, W.; Jin, X.; Agrawal, S.K. Design of a 7-DOF Cable-Driven Arm Exoskeleton (CAREX-7) and a Controller for Dexterous Motion Training or Assistance. IEEE/ASME Trans. Mechatron. 2017, 22, 161–172. [Google Scholar] [CrossRef]
- Chen, W.; Cui, X.; Zhang, J.; Wang, J. A cable-driven wrist robotic rehabilitator using a novel torque-field controller for human motion training. Rev. Sci. Instrum. 2015, 86, 065109. [Google Scholar] [CrossRef]
- Cui, X.; Chen, W.; Zhang, J.; Wang, J. Note: Model-based identification method of a cable-driven wearable device for arm rehabilitation. Rev. Sci. Instrum. 2015, 86, 096107. [Google Scholar] [CrossRef]
- Dinh, B.K.; Xiloyannis, M.; Cappello, L.; Antuvan, C.W.; Yen, S.-C.; Masia, L. Adaptive backlash compensation in upper limb soft wearable exoskeletons. Robot. Auton. Syst. 2017, 92, 173–186. [Google Scholar] [CrossRef]
- Mustafa, S.K.; Yang, G.; Yeo, S.H.; Lin, W. Self-Identification of the Joint Centre of a Cable-Driven Shoulder Rehabilitator. In Proceedings of the 2007 IEEE International Conference on Robotics and Automation, Roma, Italy, 10–14 April 2007; pp. 3767–3772. [Google Scholar]
- Balasubramanian, S.; Wei, R.; Perez, M.; Shepard, B.; Koeneman, E.; Koeneman, J.; He, J. RUPERT: An exoskeleton robot for assisting rehabilitation of arm functions. In Proceedings of the 2008 Virtual Rehabilitation, Vancouver, BC, Canada, 25–27 August 2008; pp. 163–167. [Google Scholar]
- Zhang, J.; Yang, C.; Chen, Y. Exoskeleton arm with force feedback for robot bilateral teleoperation. Prog. Nat. Sci. 2007, 17, 948–955. [Google Scholar]
- Goto, A.; Moritomo, H.; Murase, T.; Oka, K.; Sugamoto, K.; Arimura, T.; Nakajima, Y.; Yamazaki, T.; Sato, Y.; Tamura, S.; et al. In vivo elbow biomechanical analysis during flexion: Three-dimensional motion analysis using magnetic resonance imaging. J. Shoulder Elb. Surg. 2004, 13, 441–447. [Google Scholar] [CrossRef]
- Hayashi, Y.; Dubey, R.; Kiguchi, K. Torque optimization for a 7DOF upper-limb power-assist exoskeleton robot. In Proceedings of the 2011 IEEE Workshop on Robotic Intelligence in Informationally Structured Space, Paris, France, 11–15 April 2011; pp. 49–54. [Google Scholar]
- Lim, W.B.; Yeo, S.H.; Yang, G.; Chen, I.-M. Design and Analysis of a Cable-driven Manipulator with Variable Stiffness. In Proceedings of the IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, 6–10 May 2013; pp. 4519–4524. [Google Scholar]
- Behzadipour, S.; Khajepour, A. Stiffness of cable-based parallel manipulators with application to stability analysis. J. Mech. Des. 2006, 128, 303–310. [Google Scholar] [CrossRef]
- Osada, M.; Ito, N.; Nakanishi, Y.; Inaba, M. Realization of Flexible Motion by Musculoskeletal Humanoid “Kojiro” with Add-on Nonlinear Spring Units. In Proceedings of the IEEE-RAS International Conference on Humanoid Robots, Nashville, TN, USA, 6–8 December 2010; pp. 174–179. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Unidentified [mm] | Identified [mm] |
|---|---|---|
| [0; 0; 62] | [2 ± 10.4; 15 ± 4.5; 60 ± 5] | |
| [0; 0; 280] | [0; 0; 274 ± 3.2] | |
| [0; 0; 0] | [6 ± 4.1; 4 ± 3.3; 2 ± 2.2] | |
| [0; 0; 0] | [1 ± 3.1; 8 ± 4.3; 3 ± 1.7] |
| Parameters | Unidentified [mm] | Identified [mm] |
|---|---|---|
| [0; 0; 71] | [6 ± 5.9; 11 ± 8.7; 74 ± 5.1] | |
| [0; 0; 273] | [0; 0; 278 ± 5.6] | |
| [0; 0; 0] | [3 ± 5.2; 2 ± 3.4; 1 ± 1.9] | |
| [0; 0; 0] | [2 ± 1.7; 3 ± 2.1; 4 ± 2.1] |
| Subject | RMS Error [mm] | ||||||
|---|---|---|---|---|---|---|---|
| A | Unidentified | 11.9 | 10.8 | 10.8 | 12.3 | 19.5 | 13.1 |
| Identified | 5.1 | 3.6 | 3.5 | 4.1 | 8.3 | 6.6 | |
| B | Unidentified | 15.6 | 14.3 | 7.1 | 17.4 | 13.6 | 13.2 |
| Identified | 4.4 | 7.8 | 3.4 | 2.5 | 6.3 | 7.1 | |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, W.; Li, Z.; Cui, X.; Zhang, J.; Bai, S. Mechanical Design and Kinematic Modeling of a Cable-Driven Arm Exoskeleton Incorporating Inaccurate Human Limb Anthropomorphic Parameters. Sensors 2019, 19, 4461. https://doi.org/10.3390/s19204461
Chen W, Li Z, Cui X, Zhang J, Bai S. Mechanical Design and Kinematic Modeling of a Cable-Driven Arm Exoskeleton Incorporating Inaccurate Human Limb Anthropomorphic Parameters. Sensors. 2019; 19(20):4461. https://doi.org/10.3390/s19204461
Chicago/Turabian StyleChen, Weihai, Zhongyi Li, Xiang Cui, Jianbin Zhang, and Shaoping Bai. 2019. "Mechanical Design and Kinematic Modeling of a Cable-Driven Arm Exoskeleton Incorporating Inaccurate Human Limb Anthropomorphic Parameters" Sensors 19, no. 20: 4461. https://doi.org/10.3390/s19204461