1. Introduction
Photoacoustic imaging (PAI) is a non-ionizing imaging modality, based on the photoacoustic (PA) effect. PAI combines the high absorption contrast of optical imaging with the high spatial resolution of ultrasound imaging to visualize tissue chromophores in the optical quasi-diffusive or diffusive regime. In PAI, the biological tissue is illuminated with a short-pulsed laser beam that results in the generation of internal acoustic signals via the thermoacoustic effect. The subsequent ultrasound signal propagating from within the tissue is then detected by several wide-band ultrasonic transducers located outside the tissue. The ultrasound signal is then used to form an image through a reconstruction algorithm [
1,
2]. Several preclinical studies have demonstrated the tremendous utility of PAI in providing functional, molecular, and structural information about biological tissues [
3,
4,
5,
6,
7,
8,
9].
Due to the functional imaging capability of PAI, one of the fast-emerging applications for this technology has been transcranial brain imaging in small and large animals [
6,
10,
11,
12,
13,
14,
15,
16,
17,
18,
19,
20]. Measuring cerebral hemodynamic parameters using PAI is arguably one of the most desired applications in brain functional imaging, tumor hypoxia evaluation, and even cancer therapy [
10,
21]. In recent works different types of photoacoustic computed tomography systems have been used for non-invasive, high resolution, and deep functional mouse brain imaging with the skull intact to study brain hemodynamics [
22,
23,
24,
25].
Despite promising results obtained from small animal, i.e., mice, PA brain imaging experiments, the signal deteriorating effect of skull is significant and has affected the image quality [
26,
27,
28]. This issue has also been expressed at earlier works in transcranial ultrasound wave propagation in the context of ultrasound imaging or therapy, which demonstrating the unwanted distortions of the skull in the location and shape of the therapeutic focus, along with a reduction in focal intensity [
29,
30,
31,
32,
33,
34,
35]. Pinton et al. quantified numerically and experimentally the attenuation, scattering, and thermal absorption of ultrasound in the human skull bone [
36].
Skull-induced deterioration of the PA signal, so called “aberrations”, is due to attenuation, dispersion, and longitudinal to shear mode conversion [
27,
37,
38,
39]. Skull bone represents a highly acoustical impedance mismatch and dispersive barrier for the propagation of the ultrasound/PA wave [
40]. Acoustic attenuation is due to absorption and scattering of the skull tissue or the reflection at the skull–tissue interfaces [
38]. Attenuation is a frequency-dependent phenomenon and affects the amplitude of the signal [
37,
41]. Acoustic dispersion is the dependency of the sound speed or phase velocity to the frequency. It distorts the phase information in the PA signal [
37]. Several groups investigated the effects of acoustic attenuation on PA signals and its relation to dispersion [
42,
43,
44,
45]. It has been shown that the frequency-dependent reduction of amplitude and corresponding dispersion of the acoustic waves contributes to the broadening of the PA signals and reduces the resolution of the reconstructed images [
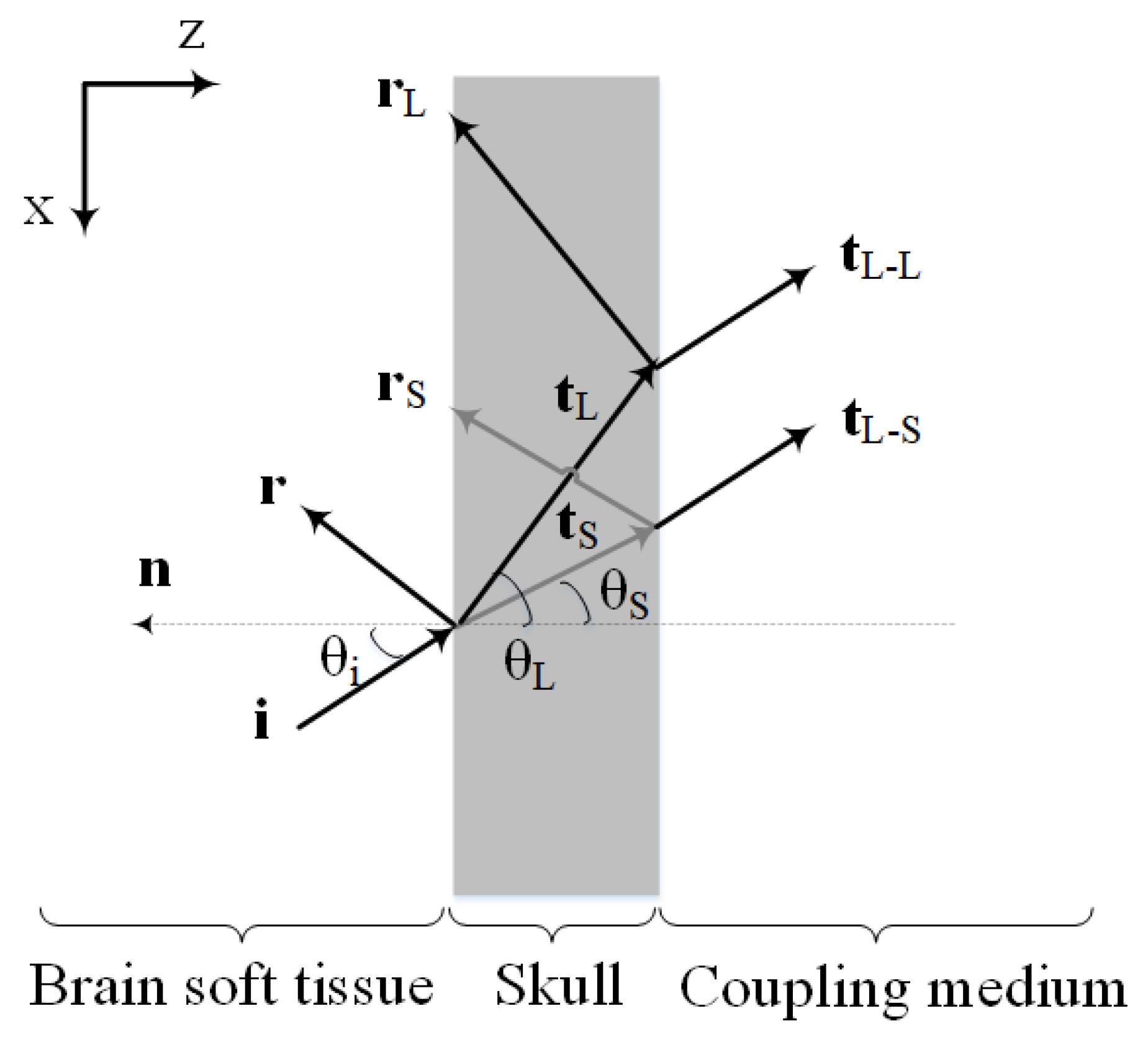
42]. Mode conversion between longitudinal and transverse waves occurs when a wave encounters an interface between materials of different acoustic impedances with the incident angle not being normal to the interface [
39]. The combination of these skull-induced aberrations diminishes the quality of the PA images [
46,
47].
There have been several studies that modeled skull aberrations in transcranial ultrasound and PA imaging based on ray-acoustic model [
35], angular spectrum method [
31,
39,
48,
49], and full-wave propagation equation [
32,
33,
34,
50]. The most common numerical methods to model the skull are finite-difference, finite-element, and boundary-element [
32,
33,
34,
36,
44,
50,
51,
52,
53,
54]. K-Wave, is a MATLAB toolbox, uses a finite-difference time-domain (FDTD) algorithm for modeling. k-space pseudo-spectral algorithm is the faster version of FDTD [
55]. The modified k-Wave is still slow and limited in accurately modeling the acoustic attenuation in multilayer tissues. Huang et al. proposed a method to incorporate the prefactor in power law absorption model to make it as a spatially varying quantity for heterogeneous lossy media [
47]. The speed problem however remains a challenge.
Deterministic ray-tracing is a method for calculating the propagation of waves through a system with regions of varying propagation velocity and absorption characteristics and explains how energy travels along a large number of lines in space between a source and a detector [
56]. Kyriakou et al. employed a semi-analytical ray-tracing approach that takes the skull properties into account and allows calculation of improved effective distance-based phase corrections in transcranial ultrasound propagation [
50]. Jin et al. developed a numerical model based on the ray theory for calculating the propagation of thermoacoustic waves through the skull to investigate the effects of the skull and correct for the induced phase distortion [
38].
The objective of this study is to develop a fast simulation framework based on deterministic ray-tracing. The simulation takes into account the frequency-dependent attenuation and dispersion effects that occur in wave reflection, refraction, and mode conversion at the skull surface. The main advantage of the proposed framework over the current computational methods is its speed.
4. Results
The experimental results as well as the results obtained from our simulations are presented in this section.
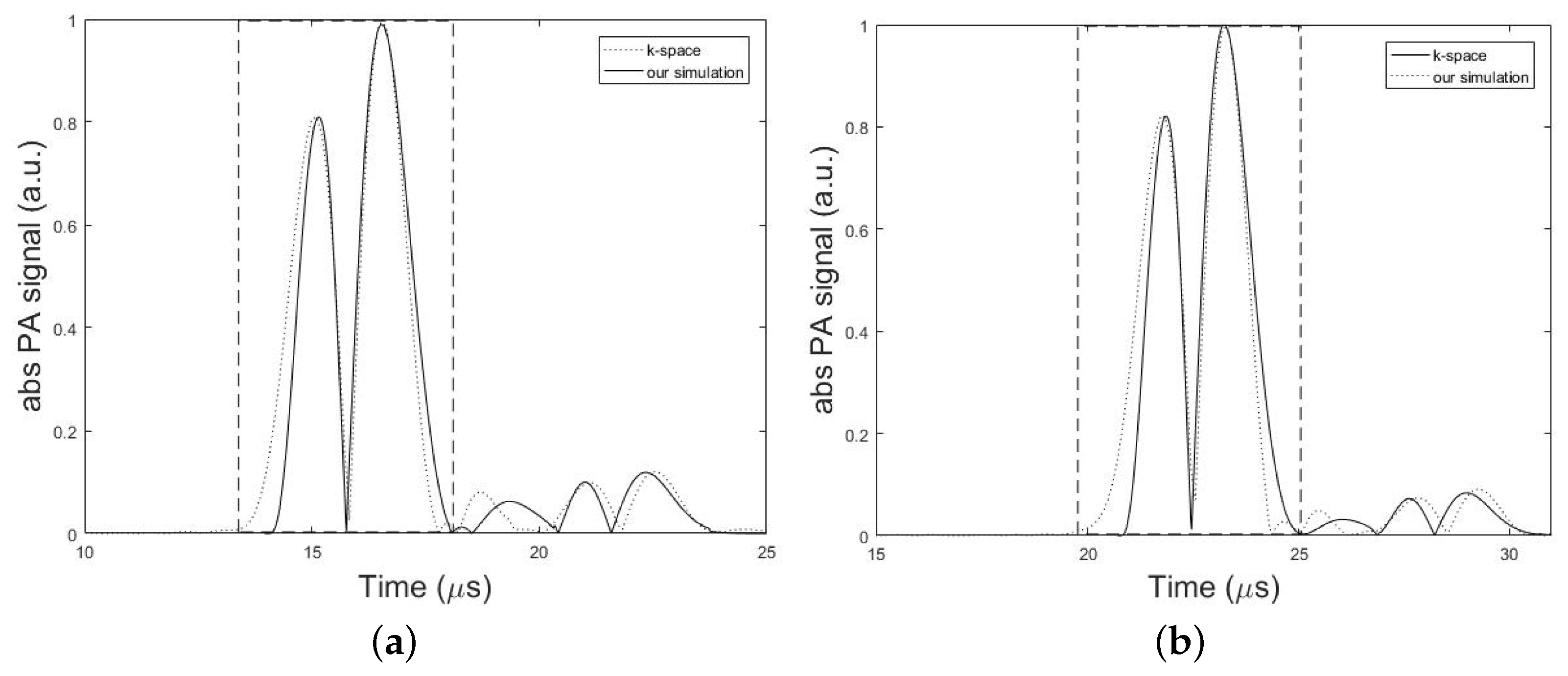
Figure 5, compares the absolute amplitudes of two simulated PA signals from a single spherical absorber using k-space algorithm and our simulator in two different conditions corresponding to the minimum and maximum error obtained from the simulations. Dashed rectangles in
Figure 5 show the main bipolar pulse of the PA signal. In
Figure 5a, the setup in
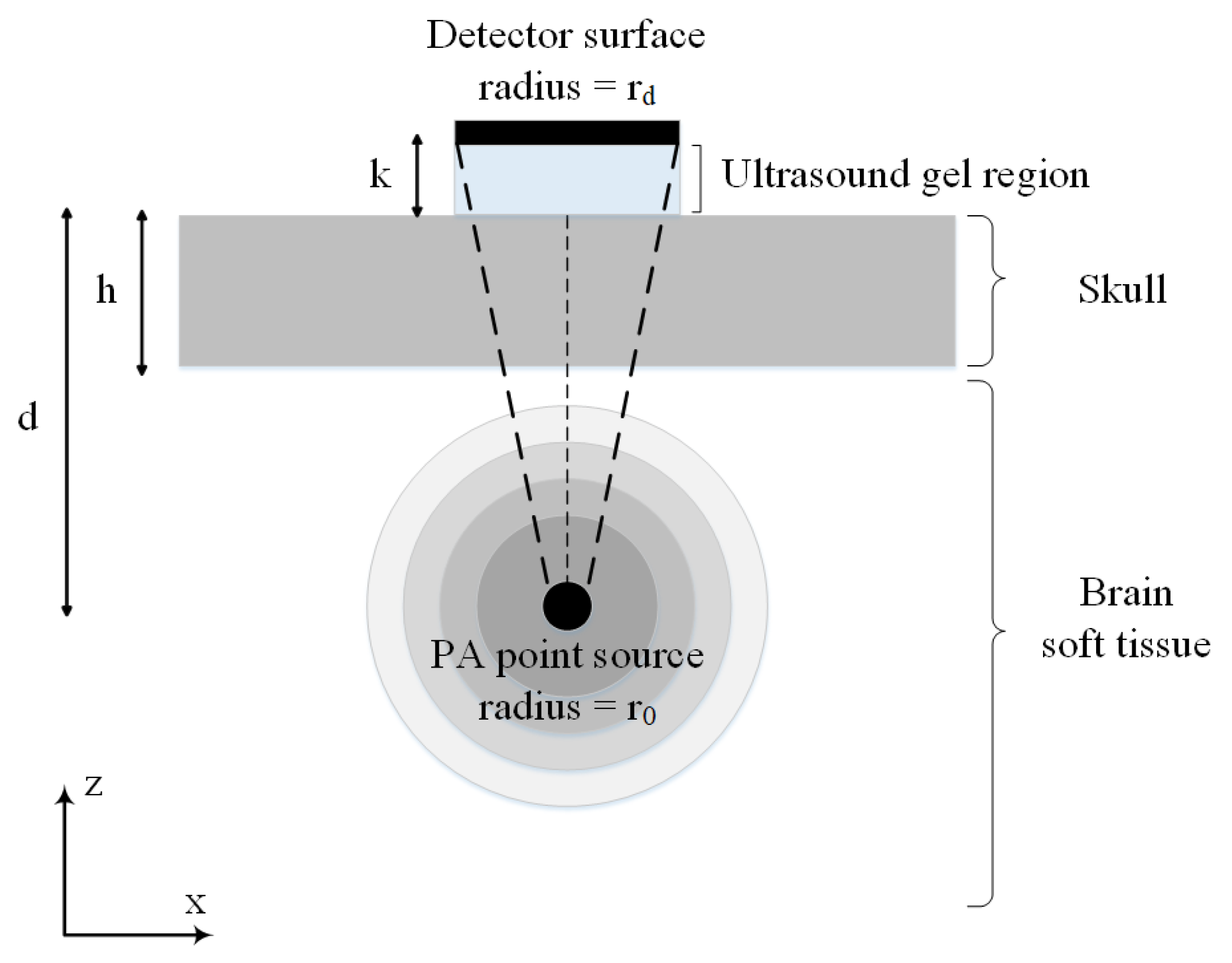
Figure 2 was used with the parameters,
h = 7 mm,
d = 1.7 cm,
k = 10 mm,
= 1 mm,
= 0.025 inch, and
T = 5 cm and the minimum error of 0.11% was obtained from the analysis of NSD value. In
Figure 5b, simulations of the same structure were also performed only by changing the value of parameter
d to 2.7 cm. In this case, the maximum error of 0.25% was obtained from the analysis of NSD value. In overall, a good agreement between two models was obtained with an average error of 0.17%. The results can be seen in
Table 2 and
Table 3.
To further verify the proposed simulator, the analytical validation is also performed based on the calculation of the intensity transmission coefficients. The results of longitudinal and shear intensity transmission coefficients obtained numerically and analytically are given in
Table 4. These results are in a good agreement with errors in the order of 0.00% to 4.51%, thus verifying analytically our proposed algorithm. Please note that in numerical simulation by the ray-tracing model for each incidence angles of 0
, 15
, and 30
, only one ray was launched to the inner-skull surface at each frequency and then the transmitted intensity of the longitudinal and shear waves were individually calculated at this interface. By this way, we have two individual STFT matrix corresponding to the transmitted longitudinal and shear waves at the inner-skull surface. These two STFT matrix are now inverse transformed to give the longitudinal and shear waves individually just above the inner-skull surface. Finally, the longitudinal and shear intensity transmission coefficients are calculated by dividing the intensity of the corresponding transmitted waves to the intensity of the incident waves at the inner-skull surface.
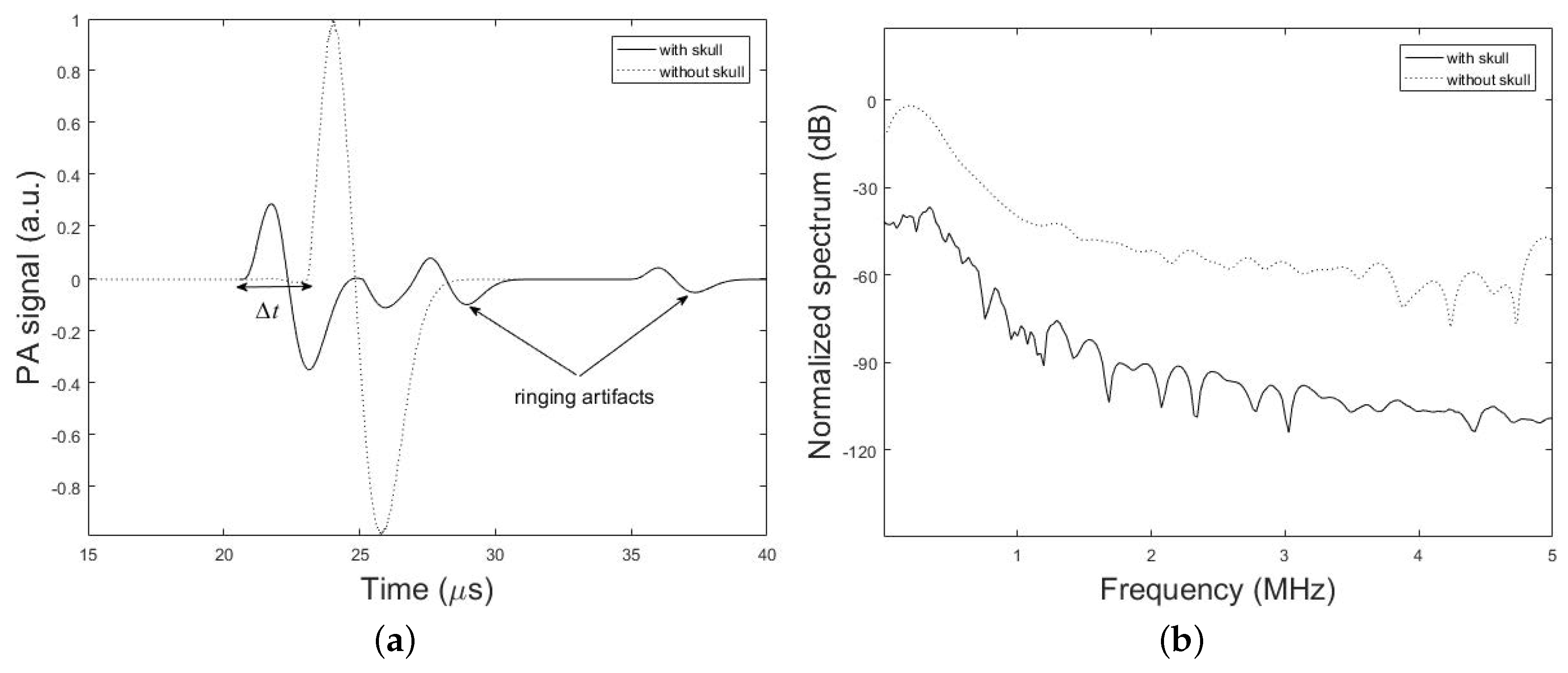
Figure 6, demonstrates the time-domain PA signals and the corresponding normalized frequency spectrum simulated by our method with the presence and absence of the
h = 7 mm thick skull above the brain tissue layer. The spherical PA source with the radius of
= 1 mm is located at the depth of
d = 2.7 cm from the ultrasound coupling gel with thickness of
k =10 mm. The ultrasound transducer with the element diameter of
= 0.5 inch is used in contact with the coupling gel. It can be seen that the peak of the transcranially recorded PA signal is significantly lower in amplitude compared to that of without skull. It is also shown that the presence of the skull in the acoustic signal propagation path, makes the signal broader. The effects of time shift and multiple ringing artifacts on the PA signal due to the presence of skull are shown in
Figure 6a.
Amplitude attenuation and broadening of the signal are attributed to the frequency-dependent acoustic attenuation and dispersion of the skull which acts as a low-pass filter according to (
2) and (
3). The explanation for such distortions is as follows: due to the dispersion of the skull, different frequency components of the PA wave would travel in different speeds and hence they will arrive at the transducer at different times (or phases) which in turn would result in a broader signal compared to the undisturbed signal in the absence of the skull. Furthermore, because of the frequency-dependent attenuation of the skull higher frequencies are significantly attenuated and have a lower transmission efficiency; hence the frequency spectrum of the transcranially recorded signal becomes narrower in bandwidth compared to the undisturbed signal, i.e., broadening of the time-domain signal.
Figure 6b shows that 3 dB bandwidth of the signal is 0.23 MHz and 0.11 MHz in the absence and presence of the skull, respectively, which confirms the narrower bandwidth of the signal in the presence of the skull and therefore the low-pass filtering characteristic of the skull. Also, the significantly higher speed of sound in the bone as compared to brain soft tissue makes PA waves travel faster through the skull and detected earlier at the detector location. As a result, this leads to time shift in the transcranially recorded signal relative to the undisturbed signal marked by
in
Figure 6a. The last signal distortion occurs due to the reflection of PA waves from skull–tissue interfaces with the resultant time-domain ringing artifacts at the end of transcranially recorded signal.
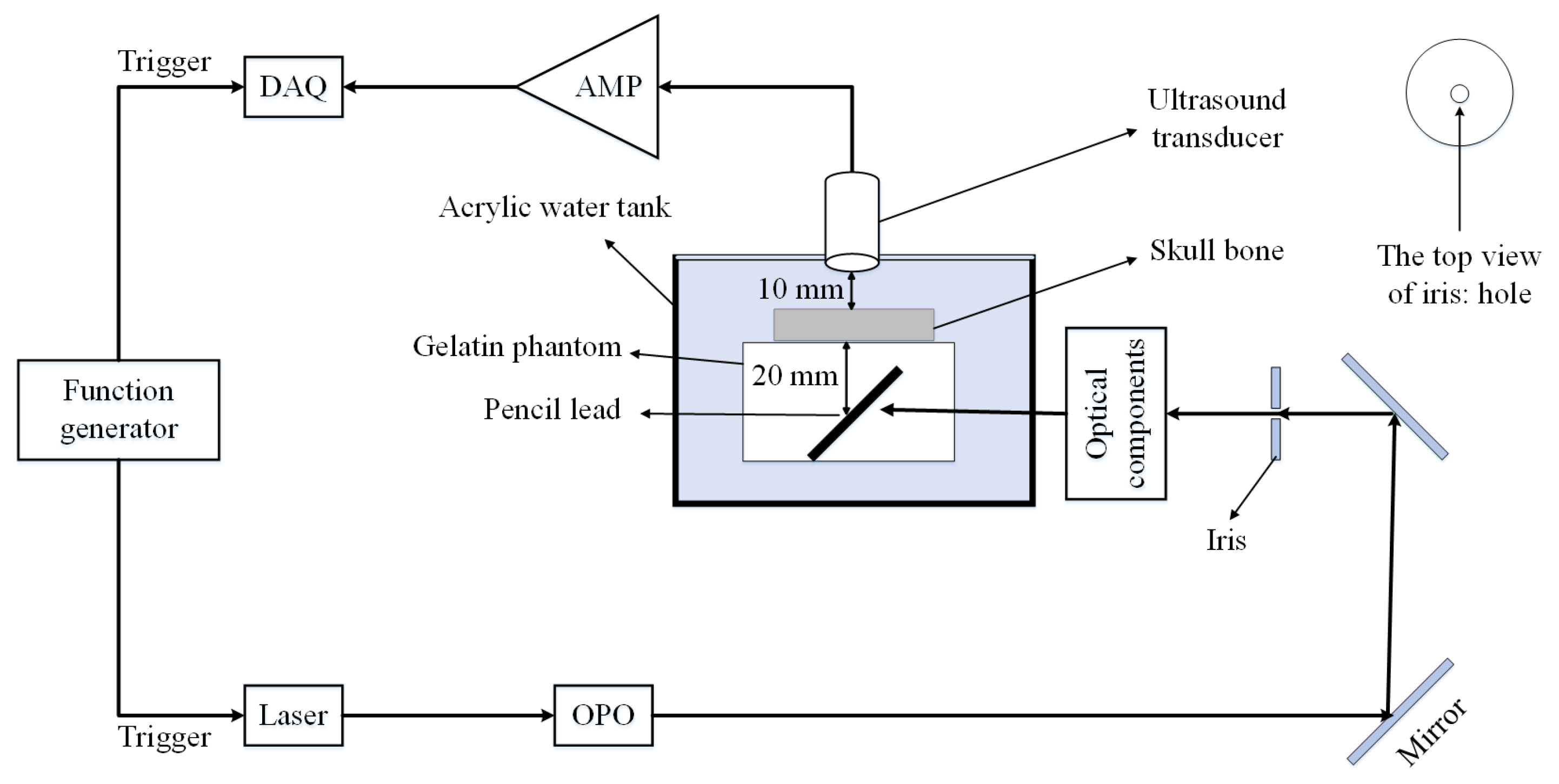
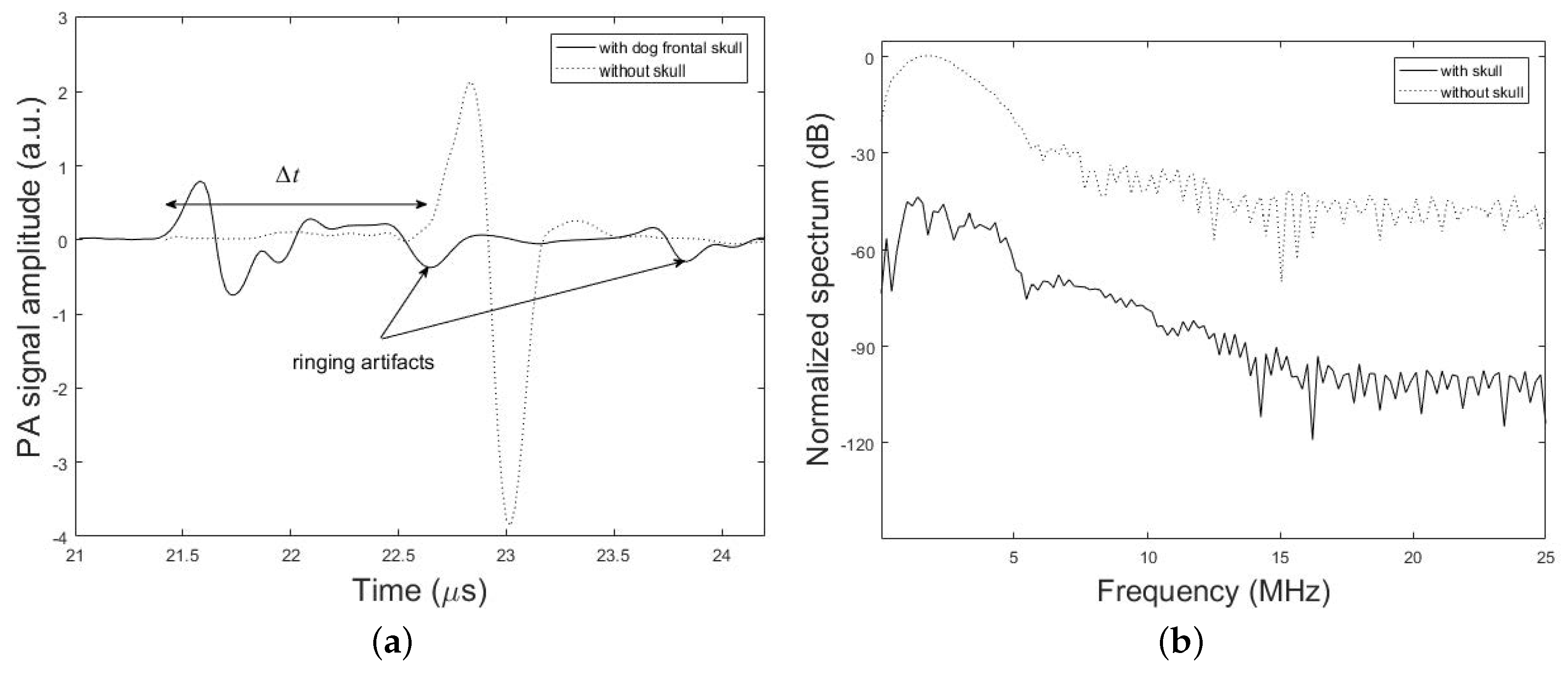
Figure 7 shows PA signal profiles obtained from the imaging target with and without the dog frontal skull sample. The effect of time shift (6.31%), attenuation (74.58%), dispersion (13.33% signal broadening) and ringing artifact on the PA signal is shown in this figure. The percent values for each parameter in these results is calculated via the difference between the desired parameter at two conditions with and without the skull, that is divided into the parameter without the skull. It is noteworthy that the differences in the experimental and simulation signal shapes and time scales arise from the differences in the setup used in experiments and simulations.
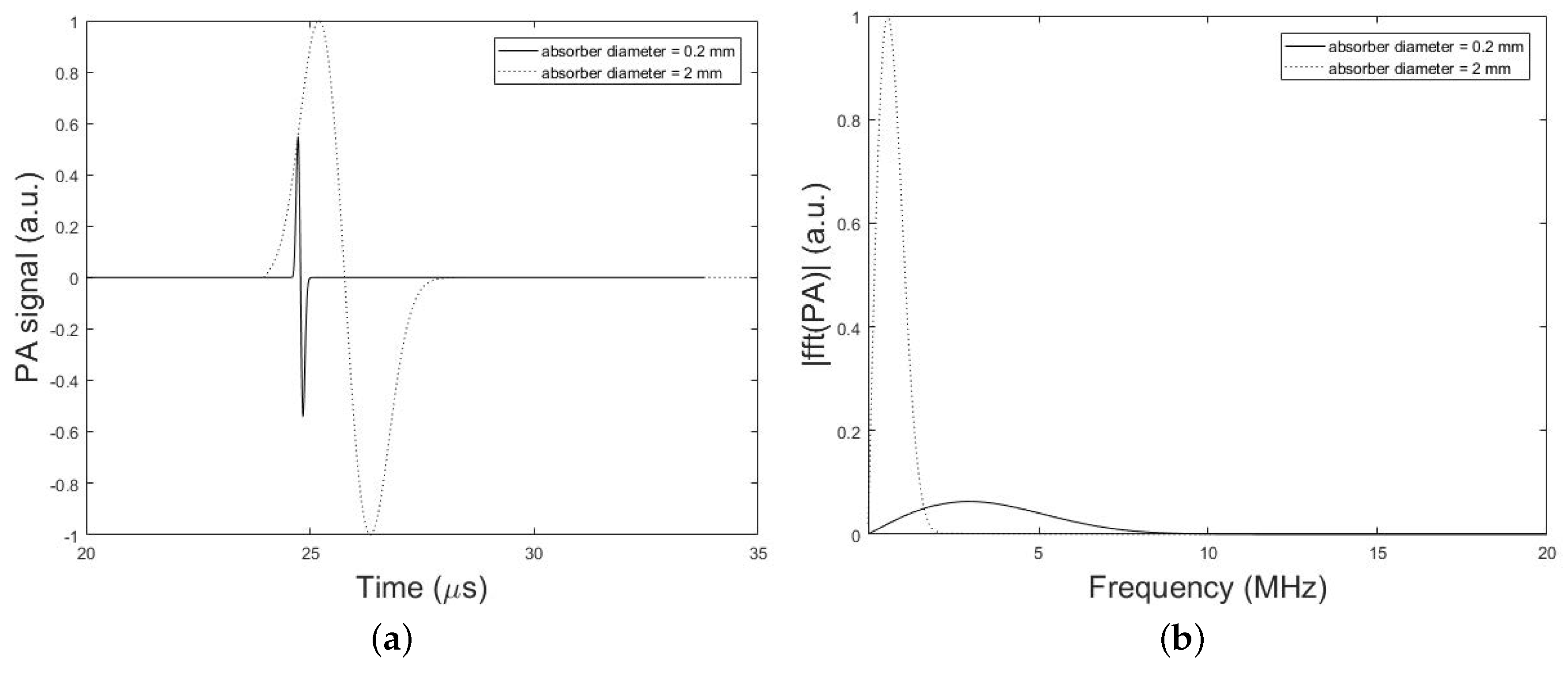
The frequency bandwidth of the emitted PA wave is also affected by the PA absorber dimension.
Figure 8, compares the time-domain PA signals and the corresponding normalized magnitude of the frequency spectrum from a single spherical absorber with two different diameters of 2 mm and 0.2 mm. In these simulations, the setup in
Figure 2 is used and the parameters set to,
h = 0 mm (i.e., without skull),
d = 2.7 cm,
k = 10 mm,
= 1 mm or 0.1 mm,
= 0.025 inch, and
T = 5 cm. It can be seen that the PA signal originating from the smaller absorber is narrower in time-domain while emits broader waves in the frequency domain compared to the larger absorber. As depicted in
Figure 8, the signal intensity attenuation largely depends on the size of the absorber that generates the original signal, so that the frequency content generated by the small-sized absorber is attenuated to a much greater extent as compared to signal from large absorber. Thus, it is expected that the stronger amplification will be needed for signals originating from small absorbers in correction algorithm.
To understand the effect of skull thickness on the PA signal distortions, we explored the amplitude attenuation, signal broadening, and signal time shift as a function of the skull thickness. In these simulations, the setup in
Figure 2 is used with the parameters,
d = 1.7 cm,
k = 10 mm,
= 1 mm,
= 0.25 inch, and
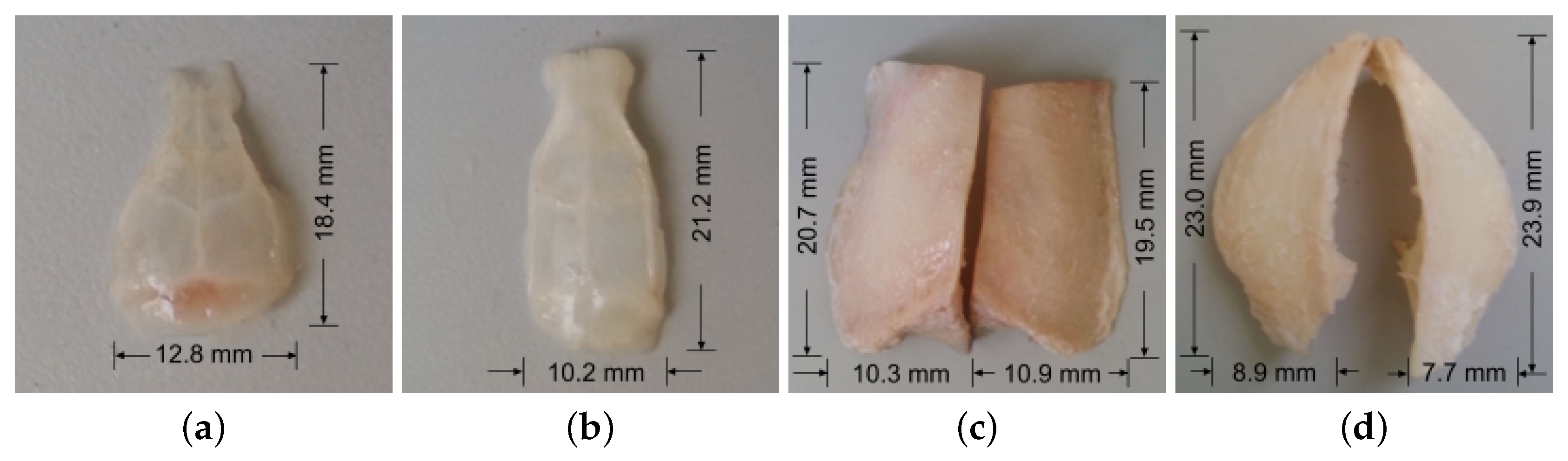
T = 5 cm. The thicknesses of the skull are as follow; 0.5 mm, representing mouse skull thickness, 1 mm, representing rat skull thickness, 1.5 mm, representing neonatal skull thickness [
74], 4.5 mm, representing dog frontal skull thickness, 5.98 mm, and 7.68 mm, representing human frontal skull thickness [
75], 9 mm, representing dog parietal skull thickness, and 9.61 mm, representing human frontal skull thickness [
75].
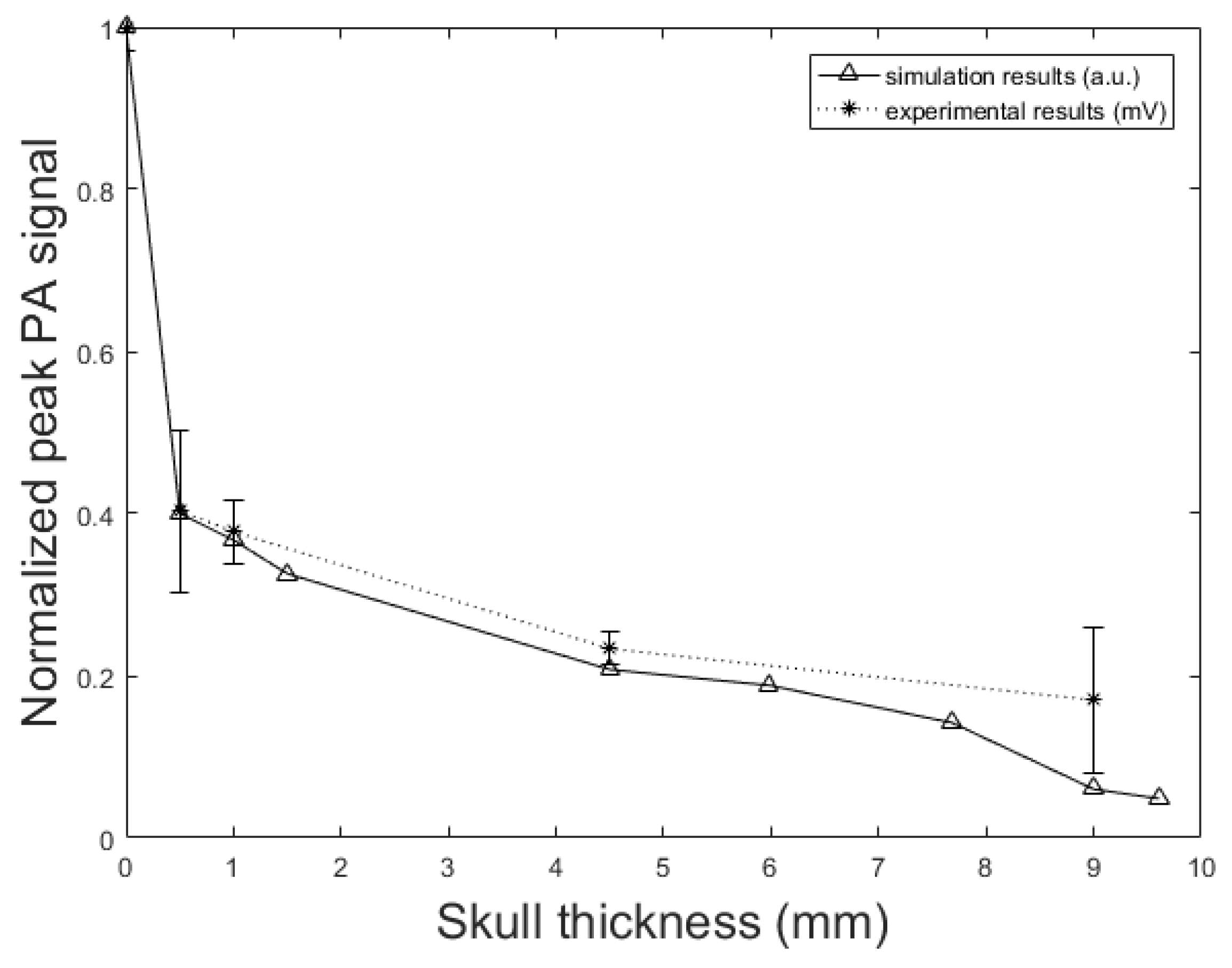
Figure 9 shows the normalized PA signal amplitude versus different skull thicknesses. The decline in the normalized PA peak signal with the increase of the skull thickness is also seen in the experimental results. In the experimental setup, when the skull is placed in the propagation pathway, the normalized PA signal amplitude decreased from 0.41 mV to 0.17 mV with increasing skull thickness from 0.5 mm to 9 mm. This means that the amplitude attenuation increased from 59% to 83%; the rate of increase is 60% to 95.17% in our simulation with increasing skull thickness from 0.5 mm to 9.61 mm. The error bars in experimental data were calculated by repeating the experiments 10 times.
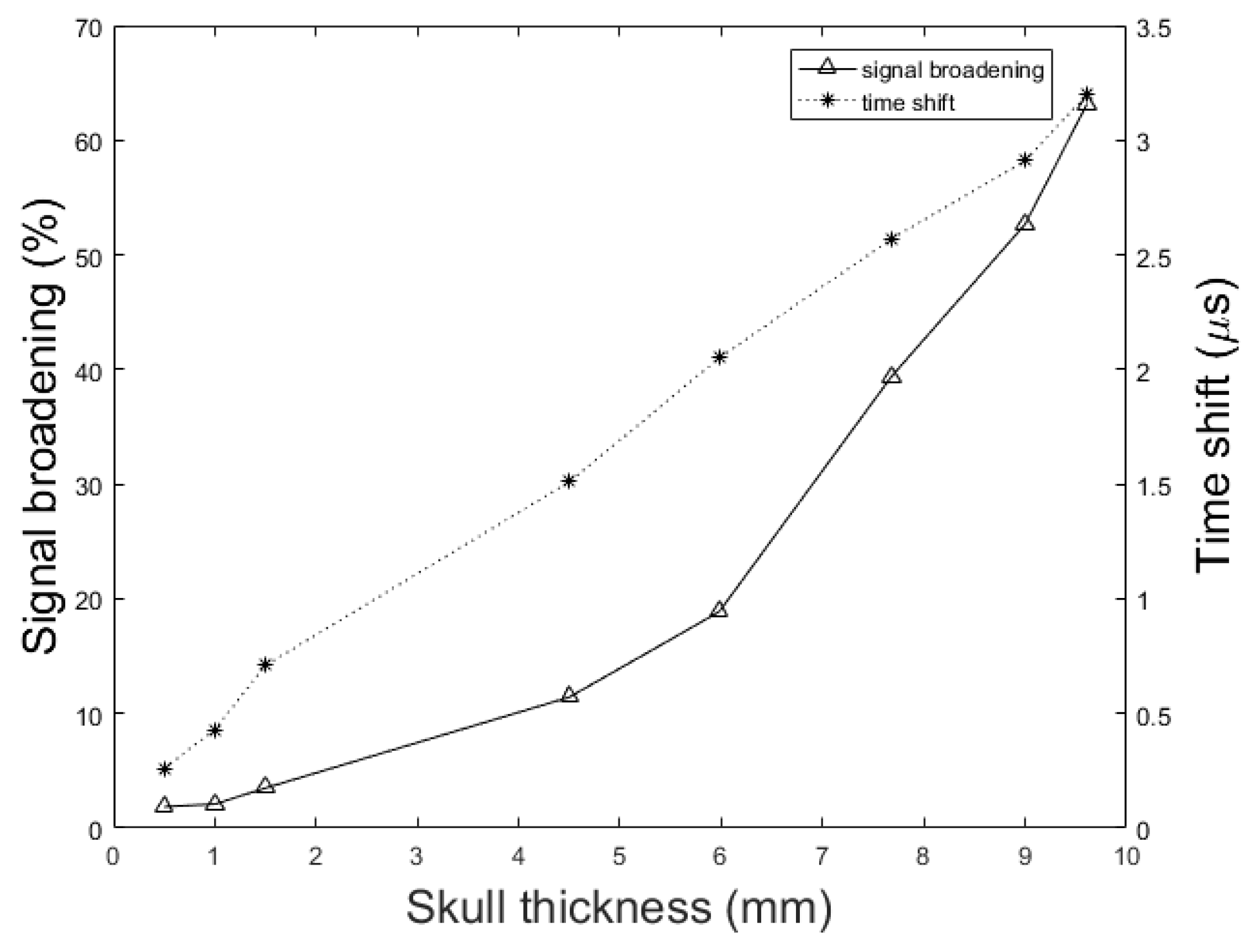
Figure 10 shows the signal broadening for different thicknesses of the skull. It can be seen that the signal broadening increased from 1.86% to 63.17% with increasing skull thickness from 0.5 mm to 9.61 mm. Here, the signal broadening is defined as the difference between the duration of the PA signal under two circumstances; with and without the skull tissue. The duration of a signal is calculated as the difference between the signal incidence time and the signal suppression time. Also, in
Figure 10 we see that the resulting time shift due to the difference between the speed of sound, increased from 0.26
s to 3.2
s with the same change in skull thickness. The time shift in the transcranially recorded signal relative to the undisturbed signal in model structure used in this study (
Figure 2) can be calculated by:
where
h is the skull thickness,
is the speed of sound in the brain soft tissue, and
is the longitudinal speed of sound in the skull. Using the thickness of 4.5 mm skull bone and with the reported values of sound speed in soft tissue and skull in literature, i.e., 1500 (m/s) and 2900 (m/s) respectively, the time shift is calculated as 1.44
s, which is confirmed by our numerical simulation result of 1.51
s.
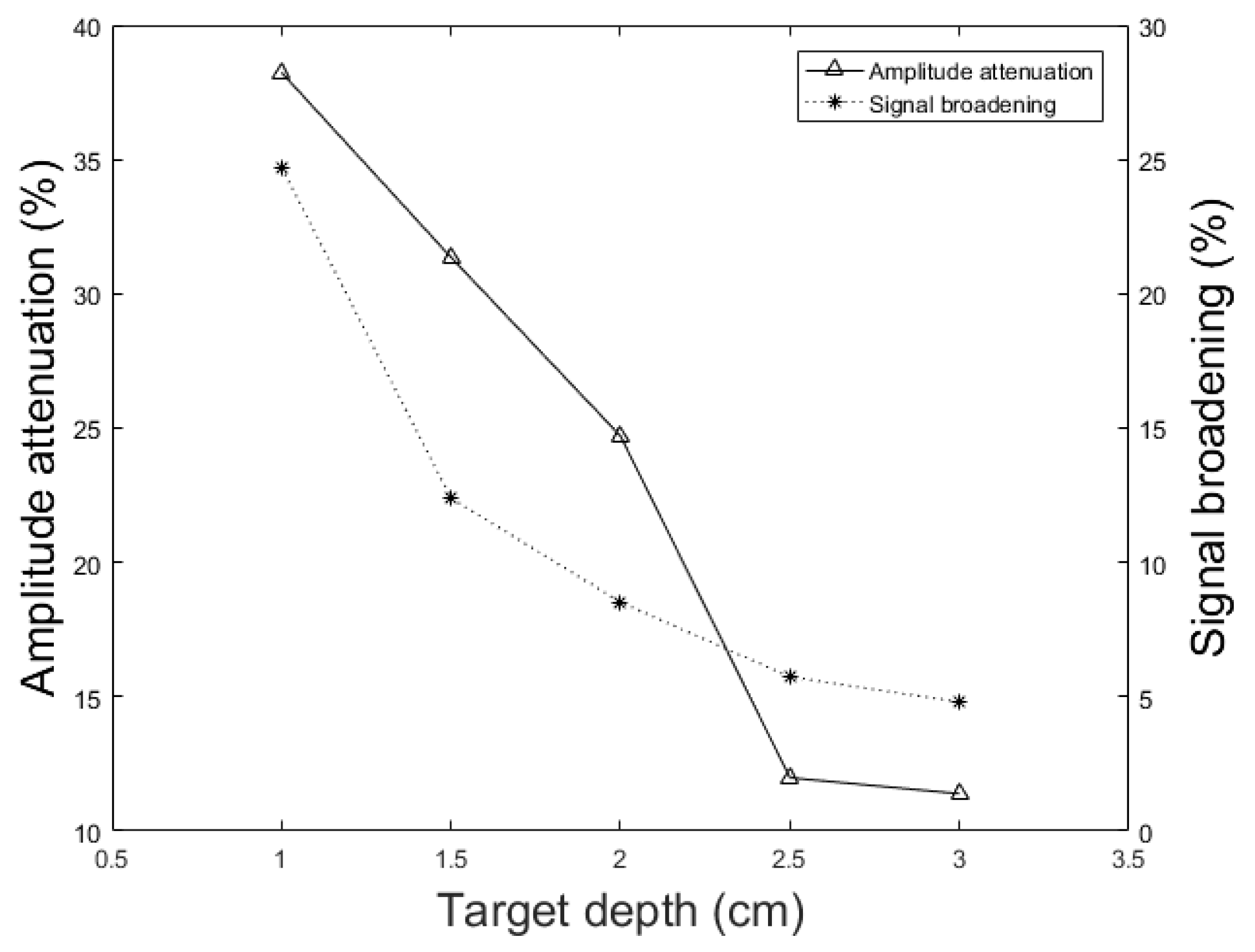
In addition to the skull thickness, we explored the effect of the distance between the imaging target and the inner-skull surface on the skull-induced acoustic attenuation and signal broadening.
Figure 11 shows that the amplitude attenuation decreased from 38.24% to 11.39% with increasing the distance between target and inner-skull surface from 1 cm to 3 cm for constant thickness of skull, i.e., 7 mm. In
Figure 11 we also see that the signal broadening effect decreased from 24.71% to 4.80% with the same change in target-skull distance. That means that the farther away the imaging target is from the inner-skull surface the less acoustic attenuation and phase distortion caused by the skull layer. In cases, where the imaging target is very close to the inner-skull surface, the skull-induced distortions become significant and the reconstructed image will significantly be distorted. As can be seen in
Figure 9,
Figure 10 and
Figure 11, under the assumption that the layers between the imaging target and the transducer are homogeneous layers with a constant density and speed of sound, the skull thickness and target location relative to the inner-skull surface are the main parameters affecting the amplitude and phase of the received PA signal. Other parameters such as the detector’s geometry, its central frequency and its relative position to the skull can affect the skull-induced distortions which will be addressed as a future work for this research.
The running time for our simulation platform is far smaller than that of k-Wave especially when the grid size is fine. In [
55], it has been demonstrated that k-space methods have inherent computational advantages over analogous pseudo-spectral or finite-difference methods. The computation speed of k-Wave calculated for different grid size using different data types and parallel processing, demonstrated the out-performance of the k-Wave algorithm. Therefore, we compared our simulator only to k-Wave and did not compare it to other computational methods.
The computation speed of the proposed framework is linearly proportional to the maximum frequency supported by the sampling rate of the signal. It also depends linearly to the number of frequencies which are modeled. In contrast, the computational speed of the k-Wave is heavily dependent on the accuracy of the grid spacing and therefore the maximum frequency supported by the computational grid at wave propagation space.
Table 5 compares the running time of k-Wave with our simulation method for different maximum frequency supported by the grid space to model the desired spatial domain size of 64
mm
. In these simulation, the setup in
Figure 2 is used with the parameters,
h = 0.7 cm,
d = 1.7 cm,
k = 10 mm,
= 1 mm,
= 0.025 inch. In k-Wave the grid spacing must be sufficiently small to ensure that the highest frequency of interest can be supported. For example, to support maximum frequency of 1 MHz, the grid size of 0.75 mm is chosen and therefore the computational domain size is 86
grid points for spatial domain size of 64
mm
. It takes about 849.45 s to simulate this structure by k-Wave on a common dual-core Intel Core i5 system with 8 GB of RAM in double precision. Decreasing the grid size to 0.5 mm (i.e., the computational size of 128
grid points) for the simulation of maximum frequency supported of 1.5 MHz, results in increasing the running time of k-Wave by approximately 3 times and it also increased more than 20 times when the
increased just to 3 MHz. No data are available for the k-Wave computation using maximum frequency supported of 5 MHz and 7.5 MHz, as these exceeded the available memory of the particular card used for the comparison. As can be seen, the running time of our method is far smaller than that in k-Wave and changes linearly with the maximum frequency supported and number of frequencies modeled.
In another investigation in
Table 6, the minimum running time of k-Wave is compared with our method for 64 frequencies and sampling rate of 50 MHz for the simulation of different skull thicknesses with different decimal precision at two target depths of 1.7 cm and 3.7 cm in model structure used. For example, for the simulation of
h = 7 mm with computational domain size of 64
grid points for target depth equal to 3.7 cm, the grid size of 1 mm is chosen for maximum speed of computation and k-Wave running time is about 168.29 s. Decreasing the grid size to 0.5 mm for the simulation of
h = 7.5 mm at same target depth, results in increasing the running time of k-Wave by approximately 15 times and increased more than 100 times when the grid size decreased to 0.25 mm. As discussed, the running time of our method remains almost constant for the fixed sampling rate and number of frequencies modeled. Although for large grid sizes the k-Wave simulation is faster than or comparable to our simulation method, increasing the grid size results in a reduction in the maximum frequency supported by the grid space. For example, maximum frequency supported by grid size of 1 mm is less than 1 MHz which is not accurate enough for simulating a higher-frequency component generated by PA signal. Therefore, the proposed simulator significantly outperformed the k-Wave method when large 3-D volume and fine grid size is considered in the simulation to support higher-frequency components of the PA signal. For example, as can be seen in
Table 6, for the simulation of
h = 7.5 mm and
d = 3.7 cm, with the grid size of 0.5 mm, results 128
elements and takes about 2533.10 s by k-Wave, while the running time by our proposed method is only 135.21 s; i.e., 18 times faster. Decreasing the grid size to 0.25 mm (i.e., the computational size of 256
) for the simulation of
h = 7.25 mm, increases the factor to more than 100 times. The fast implementation of our simulator is as a result of modeling the impulse response for each frequency and then implementing the convolution of each time-frequency component of the input signal with the corresponding frequency impulse response to get the STFT matrix of the output signal at the transducer location.
5. Discussion
The main purpose of this work was to develop a fast and accurate numerical simulation framework to explore various acoustic distortions introduced by skull on a PA wave. The proposed simulation framework which is based on the deterministic ray-tracing principles, has computational advantages over analogous k-Wave or FDTD methods. This is due to the impulse response modeling for each frequency and then implementing the convolution of each time-frequency component of the input signal with the corresponding frequency impulse response, instead of simulating every single-frequency ray at every single time it might appear.
For the sake of comparison in terms of computational complexity, we assumed that the medium was a set of acoustically homogeneous layers. The accuracy of the simulator was also validated by k-Wave and analytical method. The simulator was then used to study the major skull-distorting effects on PA waves. The effect of skull thickness and the distance between the imaging target to the inner-skull surface were comprehensively investigated. The acoustic low-pass filtering effects of the skull were assessed showing the significant loss of high-frequency components (see
Figure 6b).
We showed that the skull thickness and the location of the target relative to the inner-skull surface were the two major causes of attenuation and distortion; targets closer to the inner-skull surface and thicker skulls distort the PA signal more significantly (see
Figure 9,
Figure 10 and
Figure 11).
Time shift in the PA signal relative to that in the undisturbed signal is attributed to the difference in speed of sound in the bone as compared to that in soft tissue, which can be used as an indicator of the skull thickness in the ultrasound propagation pathway (see
Figure 6a).
Another observation was the signal distortion occurred at the skull–tissue interface due to the reflection of PA waves, along with the resultant time-domain ringing artifacts at the end of the signal (see
Figure 6a). Effect of these multiple reflections of the PA wave at the inner and outer surfaces of the skull may mistakenly be interpreted as signals generated by optical absorbers located deeper inside the brain, which further deteriorate the reconstructed images.
The existence of a second solid-fluid interface may reduce the effective angle at which shear waves can be excited. Therefore, mode conversion plays a major role in distorting the PA wave, with increasing the incident angle from the normal incidence. Mode conversion causes asymmetric attenuation of the PA signal and hence, bipolar asymmetry in the shape of the PA signal (see
Figure 6a). If the shear waves are ignored in the compensation process, many Fourier components in the PA signal will be mis-estimated. Also, due to the larger attenuation of shear waves compared to that of longitudinal waves, the additional contributions of these waves in multiple reflections within the skull bone are negligible. As a result, one can say that the multiple reflection artifacts arise mainly because of longitudinal waves.
We demonstrated that the frequency bandwidth of the emitted PA wave and consequent frequency-dependent attenuation were also affected by the PA absorber size such that the smaller absorbers emitting broader band waves (see
Figure 8). Also, the signal intensity attenuation largely depends on the size of the absorber and it is expected that the stronger amplification will be needed for signals originating from small absorbers.
The very fast implementation of the proposed framework help in real-time simulation (and consequently aberration compensation) of PA waves in the entire human head in a PA computed tomography system.
In this study, we demonstrated that the forward mathematical modeling of the transmission effects (using deterministic ray-tracing principles) could explain most of the skull’s distorting effects. The results show that the skull-induced distortions on the PA signal and subsequently on the reconstructed images, are of paramount importance and indispensable. The focus of the current study was to develop a fast skull modeling method that in terms of accuracy is comparable to the state-of-the-art modeling algorithms, e.g., K-Wave. The fast implementation of the algorithm, ideally real-time, is required for practical purposes of skull aberration correction algorithm implementation and that was the main motivation of the proposed methodology. Considering non-smooth skull surface, i.e., integrating the results of this study in a finite-element model, will be the next step of this study. As another future work, we plan to use machine learning algorithms to train a kernel with the results of our simulations. Such kernel will then be used in real-time in the PA data processing unit for skull aberration correction and provide aberration corrected images. Various methods of learning could be used with all of them requiring large, realistic, and proven datasets for training then feeding those training data to the intelligent means of learning enabling it for real-time correction. In the meantime, we are considering artificial neural networks, vector space model and deep learning schemes to be used for this purpose. The real-time implementation of such framework for enhancement of transcranial PA images to compensate for the effects of skull aberrations, and therefore the clinical use of photoacoustic transcranial imaging, will be possible.














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}