A Practical, Robust and Fast Method for Location Localization in Range-Based Systems


1
State Key Lab of Subtropical Building Science, South China University of Technology, Guangzhou 510640, China
2
State Key Laboratory of Coal Resources and Safe Mining, China University of Mining and Technology, Xuzhou 221116, China
3
School of Information, Guangdong Communication Polytechnic, Guangzhou 510650, China
4
Civil, Environmental and Architectural Engineering, The University of Kansas, Lawrence, KS 66045, USA
*
Author to whom correspondence should be addressed.
Sensors 2017, 17(12), 2869; https://doi.org/10.3390/s17122869
Submission received: 31 October 2017
/
Revised: 30 November 2017
/
Accepted: 9 December 2017
/
Published: 11 December 2017
(This article belongs to the Section Sensor Networks)
Abstract
:Location localization technology is used in a number of industrial and civil applications. Real time location localization accuracy is highly dependent on the quality of the distance measurements and efficiency of solving the localization equations. In this paper, we provide a novel approach to solve the nonlinear localization equations efficiently and simultaneously eliminate the bad measurement data in range-based systems. A geometric intersection model was developed to narrow the target search area, where Newton’s Method and the Direct Search Method are used to search for the unknown position. Not only does the geometric intersection model offer a small bounded search domain for Newton’s Method and the Direct Search Method, but also it can self-correct bad measurement data. The Direct Search Method is useful for the coarse localization or small target search domain, while the Newton’s Method can be used for accurate localization. For accurate localization, by utilizing the proposed Modified Newton’s Method (MNM), challenges of avoiding the local extrema, singularities, and initial value choice are addressed. The applicability and robustness of the developed method has been demonstrated by experiments with an indoor system.
1. Introduction
The accurate localization of the objects is of importance in the information and artificial intelligence age [1,2]. Location localization technology is widely used in industrial and civil applications and has become a mainstay of geoscientific investigations [3,4,5,6,7,8]. These applications range from logistics to robot navigation, from security tracking to automotive safety, from medical services to house control and many other emerging wireless sensor network applications. Of these, the most popular daily example is Global Positioning System (GPS) [3,9]. The location accuracy of the GPS is typically in the range 3–10 m (median error about 2.9 m according to [10]) and it is sensitive to different areas such as open areas, half-open areas and urban canyons [10]. During the past decade or so, high demand has developed for more accurate localization in sparsely accessible environments. A number of technologies have been introduced for improving localization accuracy (up to centimeters) in the absence of the GPS, such as WLAN [11,12], Bluetooth [13,14], ZigBee [15,16], Ultrasound [17], GSM/CDMA [18,19], Acoustic Position System (APS) [20], and Ultra-Wide Band (UWB) technology [21,22,23,24]. The localization approaches are usually classified into three categories: (1) range-based [25], (2) angle-based [26] and (3) proximity-based [27]. Among these, range-based systems are considered to be more accurate [25].
A range-based system usually needs the installation of base stations (also known as anchors) at known locations. To determine the unknown position (tag) in a range-based system, we need to know the distances between the tag and the base stations. In particular, at least three independent distances are required to determine an unknown position in the planar system and four independent distances for an unknown position in the 3D system. To get the localization of the objects, it is necessary to solve a set of nonlinear equations. The solution of these nonlinear equations typically involves iteration to achieve convergence [28,29]. Consequently, choice of an improper algorithm can lead to undesirable computational cost, and more significantly, will lead to inaccurate positioning, especially in real time localization of moving objects, for which fast calculations are necessary.
Clearly, the accuracy of real time location localization is highly dependent on the efficiency of the solution algorithm for the nonlinear equations. Furthermore, the accuracy depends upon the quality of the distance measurements which can be affected by the clock drift [30], antenna delay [31,32], multipath [33,34], blockage [35] and interference [36]. A robust algorithm in this case should also be able to sift through bad or low-quality measurements. In this paper, we provide a novel efficient method for solving the nonlinear equations in range-based localization systems. The method is devised in a way that it can remove bad measurement data. In the following sections, we will describe the methodology, and then demonstrate through numerical examples the robustness and efficiency of the approach. The proposed location localization algorithm has been tested for an indoor localization system based upon UWB technology. The presented experiment demonstrates that the practical applicability of the algorithm, particularly for removing bad data for improving the accuracy.
2. Methodology
2.1. The Theory
To determine a location, a series of base stations are required. For example, the GPS system uses satellites as base stations. Each base station will emit messages to the unknown target tag. Based on the time of flight (TOF) between the station and the tag, the distance can be calculated by the propagation speed of the considered signal times the time of the flight. Therefore, we use a series of measured distance rmi to determine the position of the unknown tag. To this end, we are searching for the minimum of the following equation formed by considering the square of the difference of the measured and the actual distances between the tag and the base stations [37]:
In Equation (1), i is the number of the base station; x, y, z are the unknown position coordinates; and xi, yi, zi are the coordinates of the base stations. When i is larger than three for 2D localization (and four for 3D localization), the equation is over-determined. To obtain the extrema of Equation (1), it is to find the location where the derivatives are zero with respect to x, y and z, that is:
which represent a set of three nonlinear equations. Note that Equation (2) is a necessary but not a sufficient condition for finding an optimal solution strictly inside the considered domain. To solve Equation (2), we apply the iterative Newton’s Method [29,38,39]. These types of solution methods have been adapted in other localization schemes, such as those based upon the received signal strength (RSS) [29] or time difference of arrival (TDOA) [39]. It is also noteworthy that in many other localization problems both the tag-to-tag and tag-to-base station measurements are considered to minimize the position of the tags [40]. The presented approach, only considers tag-to-base station measurement and seeks to localize the location of tags individually.
In the iterative Newton’s Method case, the solution at j + 1-th iteration can be updated using the following equation:
where j is the iteration number. To avoid the Gaussian elimination process [41,42], which can be time-consuming, it is efficient to utilize the explicit inverse form of Equation (3) given in the Appendix A. For demonstration of the presented approach, we will discuss the 2D localization in the following sections. Extension to the 3D localization is straightforward.
Although Newton’s Method is widely used due to its efficiency [7,43], there are three challenges when we use it to search for the minimum of a system: (1) choice of proper initial value for the first iteration can be obscure; (2) avoiding local extrema is usually difficult; and (3) singularity in Equation (3) will result the equations unsolvable. In order to solve the above problems and accelerate the iteration process, we first developed a geometric intersection model to narrow the search domain, which is the target search area. It is notable that each distance measurement rmi has some uncertain errors. We use Gaussian distribution [44] to describe the uncertainty as follows:
where f is probability density function, i is the base station number, rm is the measurement value, ra is the actual distance between the station and the unknown tag, and σi is the standard deviation which depends upon the sensor technology and the environment. The uncertainty or random variations arise from a variety of sources, such as antenna error, system drift, multi-hops and so on. For practical computations, measurement errors are considered in a finite range, which covers a large but less than 100% probability. The assumption is that the measured distance lies in the following range:
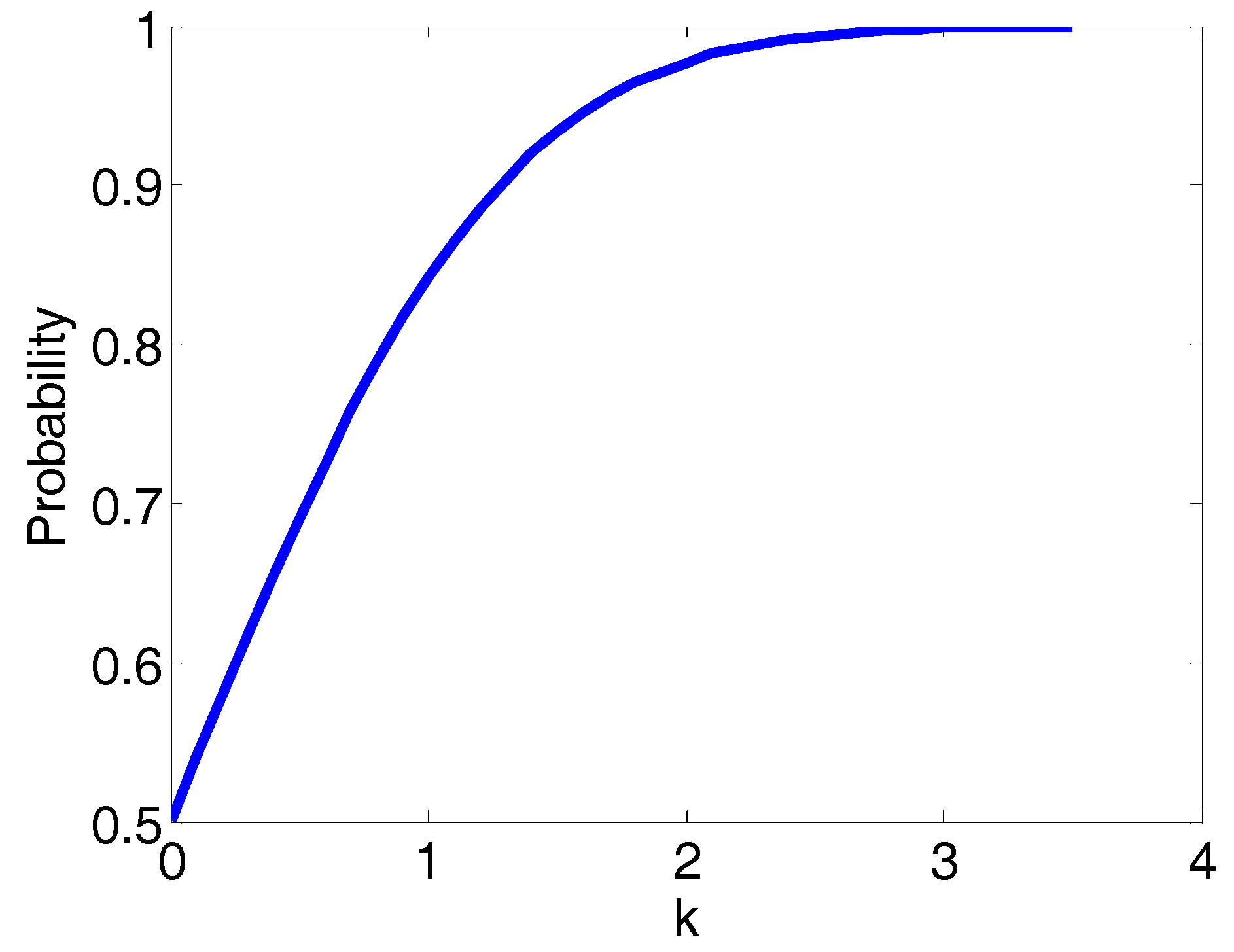
where k is a positive real number. Thus, the errors present in the distance measurement, whether they arise from multi-hops or other factors, are incorporated in the proposed localization algorithm as the probability measure k. The probability can be obtained by the integration the probability density function as follows:
We know when the parameter k = 1, 2, 3, the probability of the measured distance occurring in the corresponding ranges will be 68%, 95% and 99.7%, as seen in Figure 1.
Now, we consider the probability for the actual distance located in a specific circular area. The area is formed with the center of station i and radius of ri, where ri is the upper bound distance defined as . The probability that the unknown tag lies in the circular area (with the center of station i and radius of ri) is P(rmi < rai + kσi). The unknown tag should be located inside all similar circular areas centered at the various stations. Clearly, therefore, the unknown tag should reside inside the intersection of these circle areas. The equation for the circle’s intersection can be described as:
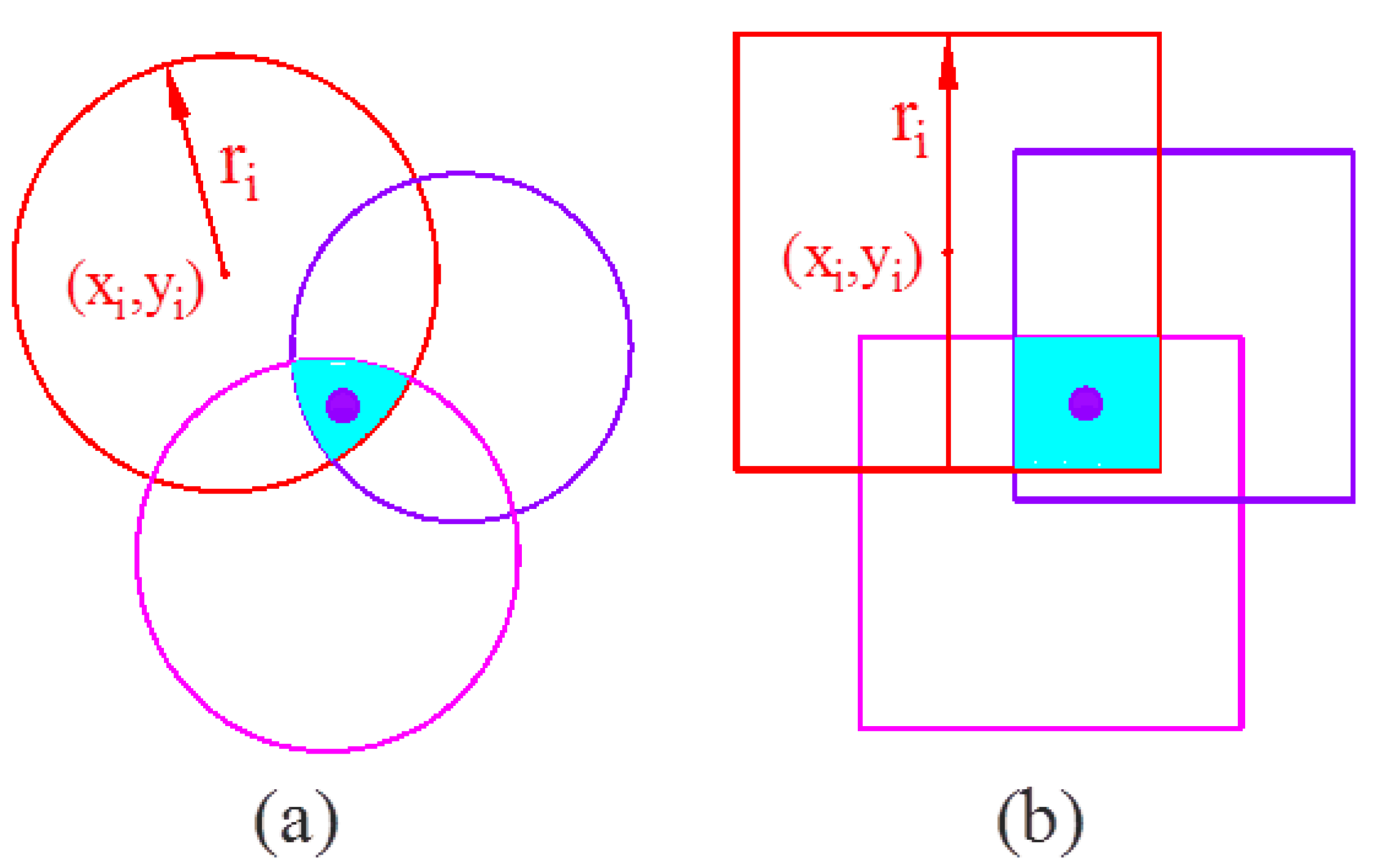
Figure 2a represents the intersection of three circle with radii ri and the blue area is the overlap area, where the unknown position is located. Geometric constraints imposed by circle-circle intersection has been used widely, see for example [45,46,47]. In the proposed algorithm, for computational simplicity and efficiency, we utilize a square centered at a station for which the equation for intersection is given as:
It is noted that the blue overlap area of the square case (Figure 2b) is larger than that of the circle case. However, in the square case, we can efficiently perform the intersection calculation mathematically. A key advantage for intersection using squares is that multiple intersections can be processed by applying the procedure in Equations (8) through (12) in a repetitive manner. In contrast, for circular geometry only two circle intersection can be considered at a time and determination of overlap of multiple circles becomes cumbersome.
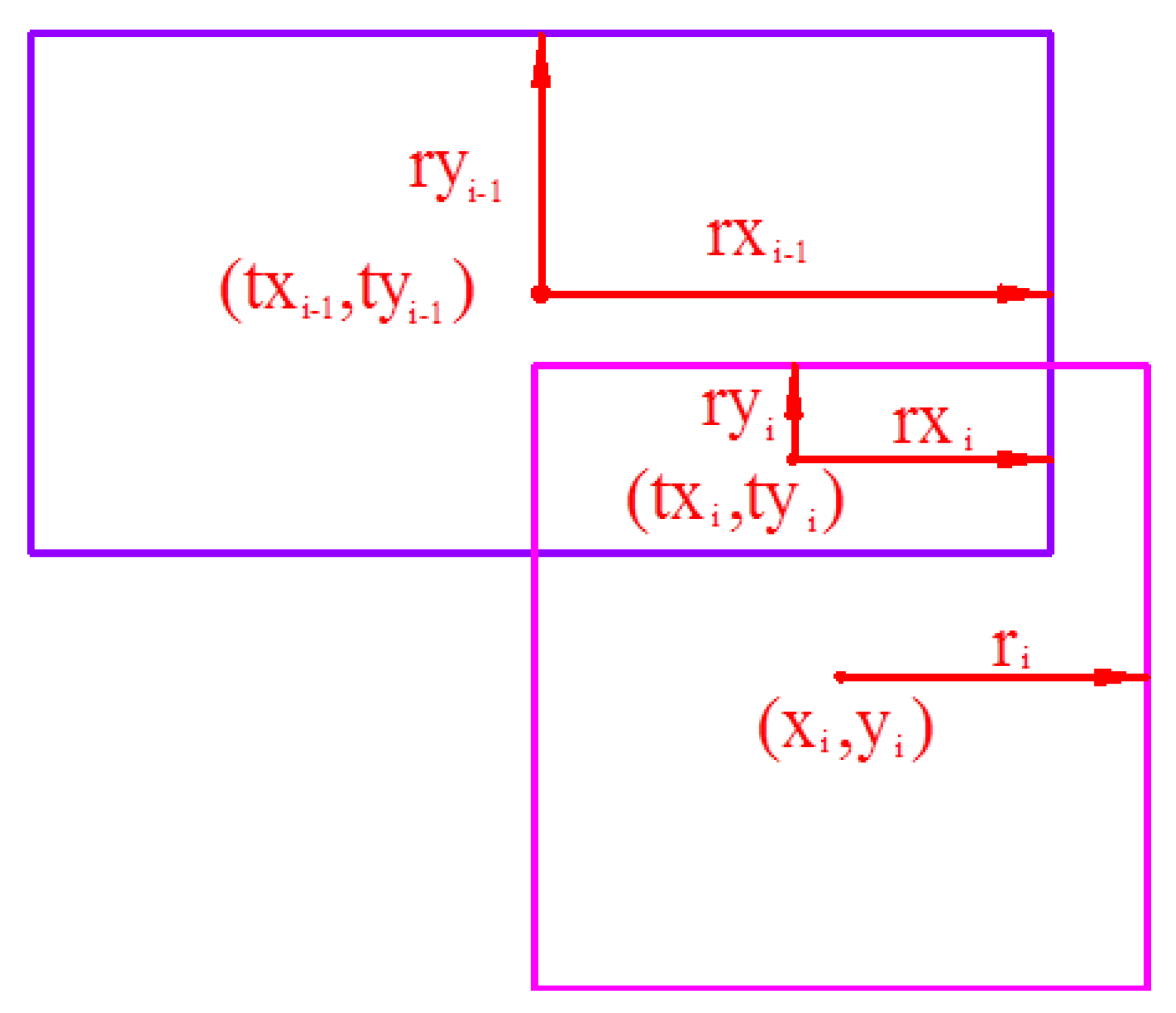
The computational algorithm begins by considering the intersection of square areas of any two arbitrarily chosen stations. The overlap area generated by these will subsequently interact with the square area of the third station and so on. At the end of each intersection computation, a new overlap rectangular area will be generated with the centroid (txi, tyi). The new rectangle generated by the intersection of the rectangle (txi−1, tyi−1) and square (xi, yi), is observed in Figure 3, where the coordinates of the rectangular centroid txi and tyi can be obtained by:
and the rectangle’s half length (rxi) and half width (ryi) and can be described as:
Once the target search area is obtained, we can use two methods to search the minima inside the area. The first method is the Direct Search Method (DSM). We mesh the target area into a series of discrete points and calculate each point’s value using Equation (1). Comparing these values, we can find the minimum, which is then taken as the solution. The DSM is useful when the target domain is small or for the coarse localization. This method is very simple to implement, however can lead to inefficiencies and loss of accuracy when the target domain is large.
The second method is the Modified Newton’s Method (MNM). In this method, we mesh the target search area into predetermined discrete points, usually 2n discrete points. We then use each point as our initial value for the Newton’s iteration given in Equation (3). It is notable that the solution of Equation (3) can be found in closed form as given in Appendix A, since the problem we are solving involves a matrix of rank 3 (2 in 2D). The approach is completely different from those discussed in other localization schemes that use the modified Newton’s method, where the difficulty arises from non-positive definiteness of the Hessian matrix and involves either the simultaneous consideration of several sensors and targets [29] or TDOA [39]. In our case, instead of determination of positive definiteness of the Hessian matrix, we only need to guarantee cc (the closed form is given in the Appendix A) is a non-zero number. If cc is equal to zero, we will give up the Newton’s iteration based on the corresponding guess. From these Newton method’s solutions, we numerically determine the ‘global minimum’. It is noted that the numerically determined ‘global minimum’ may not strictly coincide with the absolute or the smallest overall value of the function but is closest to it.
Furthermore, the reliability of the unknown tag located in the target area depends on the variance of the measurement rmi. Each distance reported by the station is independent, thus the probability of the unknown tag located in the final target area will be:
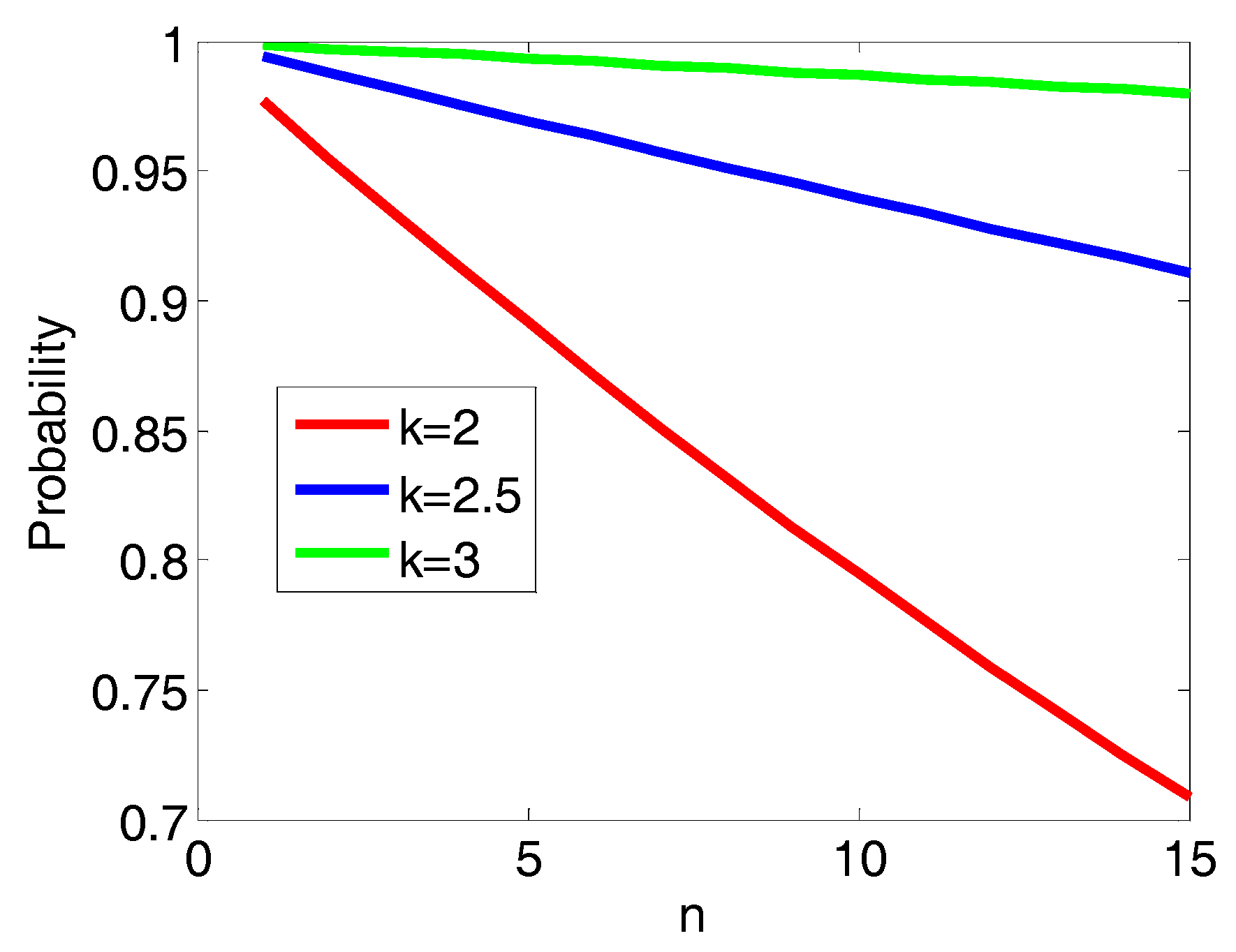
It is noted that the probability above is for the circle’s intersection. Since we enlarge the circle to square so the probability for the square’s intersection is larger than that of the circle’s intersection. Since the upper bound distance is directly related to the parameter k, a large value of k may result in a larger search domain and will lead to a higher probability of the unknown tag located in the search domain. Figure 4 demonstrates that the probability P increases as k increases, while P decreases as n increases. On the other hand, smaller k indicates more stringent screening criteria with the measurements data, which is discussed in the self-correcting process. The optimal solution is expected to be contained within the intersections of all the areas formed by the upper bound distances. For example, if a particular measurement does not have an intersection while other stations have intersections, the measurement is deemed as a bad point and discarded.
2.2. Self-Correcting Process
Low-quality measurements will definitely lead to inaccurate results. In this section, we will demonstrate how to remove bad measurements. As observed in Figure 4, as n increases, for a given k, fewer measurement meet the high-quality criterion. Furthermore, as parameter k decreases for given n, also fewer measurements meet the high-quality criterion. These low-quality data should be removed. As discussed above, the error bounds are set to be within the range (rai − kσi < rmi < rai + kσi). When rmi < rai − kσi, the unknown point may be outside the intersection region. In this case, the intersection is an empty set and we have to discard the bad points. In the algorithm, if a square area associated with a station has no intersection with the overlap area (as given in Figure 3), the measurement associated with this station is deemed as a bad point and discarded. However, when rmi > rai + kσi, the geometric intersection works. Therefore, to make sure that the intersection domain is within the range rai − kσi < rmi < rai + kσi, for each intersection domain generated by Equations (8)–(12), the distance between the station and the intersection domain should be within the error bounds. Otherwise the measurement should be removed. The upper bound calculated distance crui between the station(xi,yi) and the intersection domain with the centroid (txi, tyi) can be given by:
The lower bound calculated distance crli between the station and the intersection domain can be given by:
2.3. The Complete Algorithm
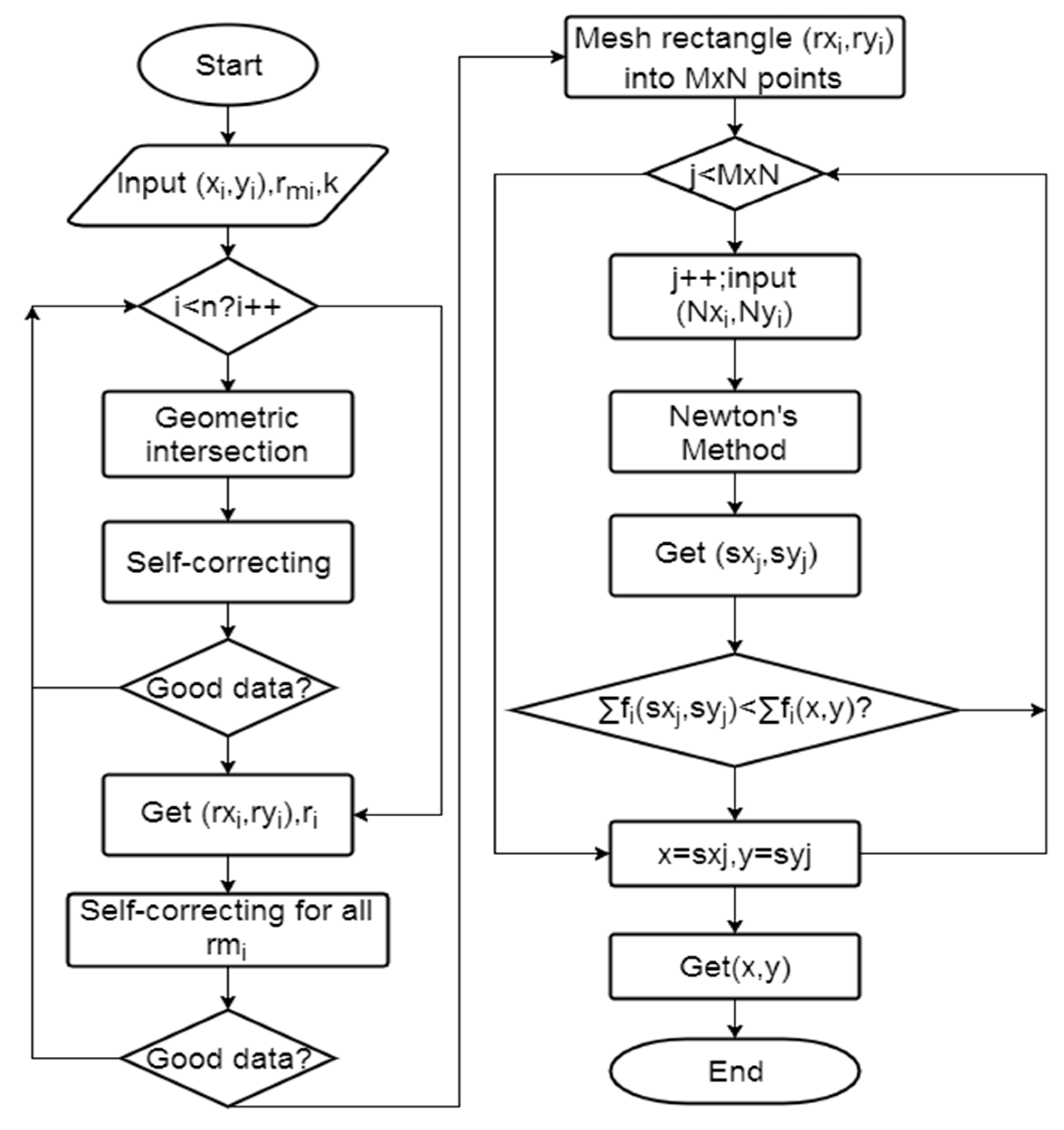
The computational algorithm based upon MNM can be summarized as follows. A flow chart of the algorithm can be seen in Figure 5.
- Step 1:
- Input the station coordinates (xi, yi) and distance rmi, k.
- Step 2:
- Perform the geometric intersection algorithm based on Equations (8)–(12). Each iteration of algorithm will generate a new intersection region. The new region will intersect with the measurement square until all the stations are exhausted.
- Step 3:
- Using the self-correcting process to determine whether the current measurement is a low-quality measurement. If it is a low-quality measurement, then remove this data and go back to step 1.
- Step 4:
- When the target search domain obtained, do the self-correcting process again to check whether any low-quality measurement still exists. Those low-quality measurements should be removed and the geometric intersection restarted until no measurement is considered as low-quality measurement.
- Step 5:
- Mesh the intersection region into M × N points (usually M × N = 2n). Use the mesh grid coordinates as the initial guess of Newton’s Method.
- Step 6:
- Use Newton’s iterations to refine the potential unknown point (sxi, syi), which could be one of the local minimums.
- Step 7:
- Find the ‘global minimum’ by comparing Ʃfj(sxj, syj) and Ʃfj(x, y). If Ʃfj(sxj, syj) < Ʃfj(x, y), substitute x = sxi, y = syi.
- Step 8:
- Repeat step 7 for all the mesh grid points.
- Step 9:
- Get the minimum Ʃf(x, y), and (x, y) is the solution.
Since the minimization is unconstrained, it is possible that the computed solution ends outside of the search domain. In the present algorithm, if the solution is outside the search domain, we will update the starting points and perform the calculation again as detailed in the flowchart, till we get the desired result.
3. Results and Discussion
3.1. A Numerical Example
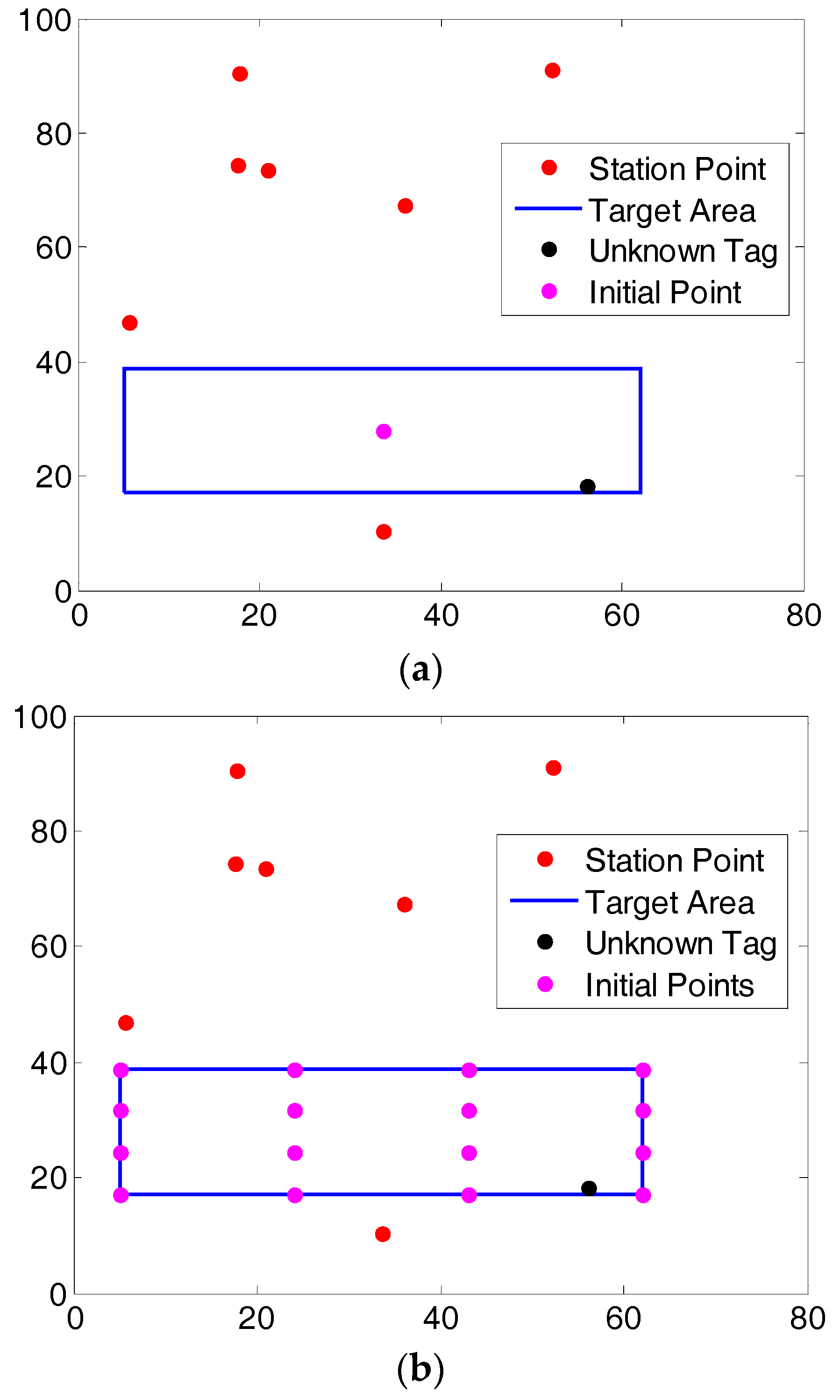
A numerical example has been designed to demonstrate the applicability of the proposed approach. Here, MATLAB is used to conduct numerical analysis in Windows 7. The computer configuration is as follows: the processor is an Intel i7 7400, memory 8 GB, disk 500 GB. At first seven base stations are generated randomly in the 100 m × 100 m square area. The coordinates of the stations are listed in Table 1. Then an unknown tag position is generated randomly inside the 100 m × 100 m square area. The measurement is assigned as the real distance between station and the tag plus a random variance of the Gaussian distribution, as shown in Table 1.
In Figure 6, the red points represent the positions of the 7 base stations; the black point is the unknown tag; the blue rectangle is the target area and purple points are the locations of initial guess. In Figure 6a we have only 1 initial guess; while in Figure 6b we have 16 initial guesses.
The choice of a proper number of the initial guess is very important. Usually inside the target area there may be several local extrema. To obtain the correct location, we have to make sure that we have searched all of these local extrema. However, choosing a larger number of initial points will result in increased computation time. Up to 2n number of initial guess may be selected in order to converge to the correct location in the shortest possible time. Mathematically, for n station system, there are at most 2n extrema (n minimums and n maximums). However, this cannot guarantee that with 2n initial guesses we can search all the extrema since different initial guesses can converge to the same extrema. In practice, usually 2n initial guesses in the target search area are enough to get all the extrema.
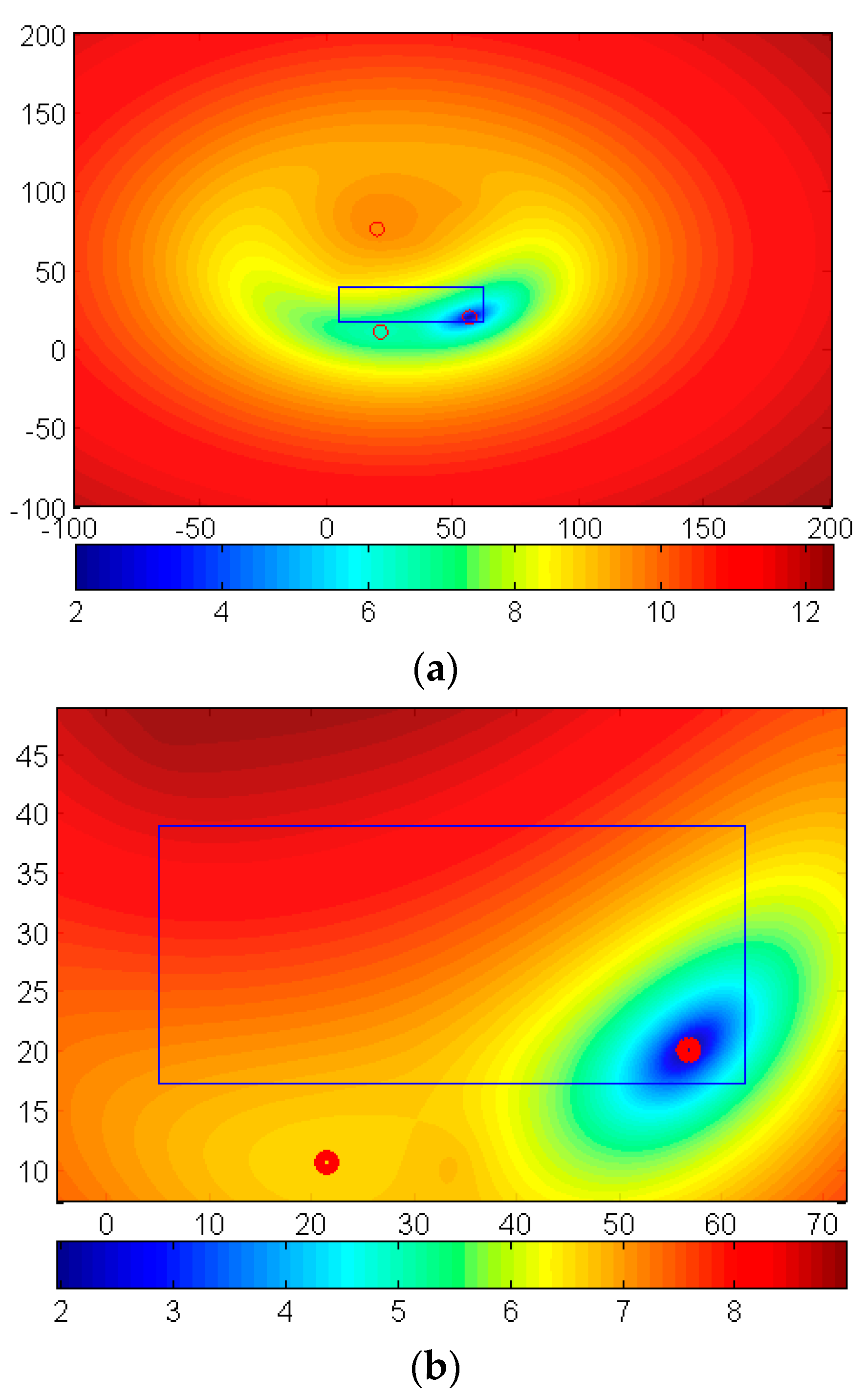
In Figure 7, the contour of the logarithm of Equation (1) is plotted based on the data in Table 1. It can be seen from Figure 7a, that the ‘global minimum’ is difficult to detect due to the presence of many closely spaced local minima that are within the calculation error. The regular algorithm, in this case, is unable to distinguish amongst these minima and converges arbitrarily to one of the many minima. Clearly, in this case, the traditional Newton’s Method can be risky, since there is no way to know the ‘global minimum.’ On the other hand, in the proposed method, whose results are shown in Figure 7a, we can see that we can localize the minimum inside the target area. Remark that the contours in Figure 7b are over a subarea of Figure 7a and the ‘global minimum’ is clearly detectable. However, if the initial values are not chosen properly, we will not get the minimum inside the target area. It is observed in Figure 7b that one initial guess will be very risky because they may converge to the location outside the target region, which is the reason why we need multiple initial guesses in the MNM model.
3.2. Comparison of Calculation Time between Direct Search Method and Modified Newton’s Method
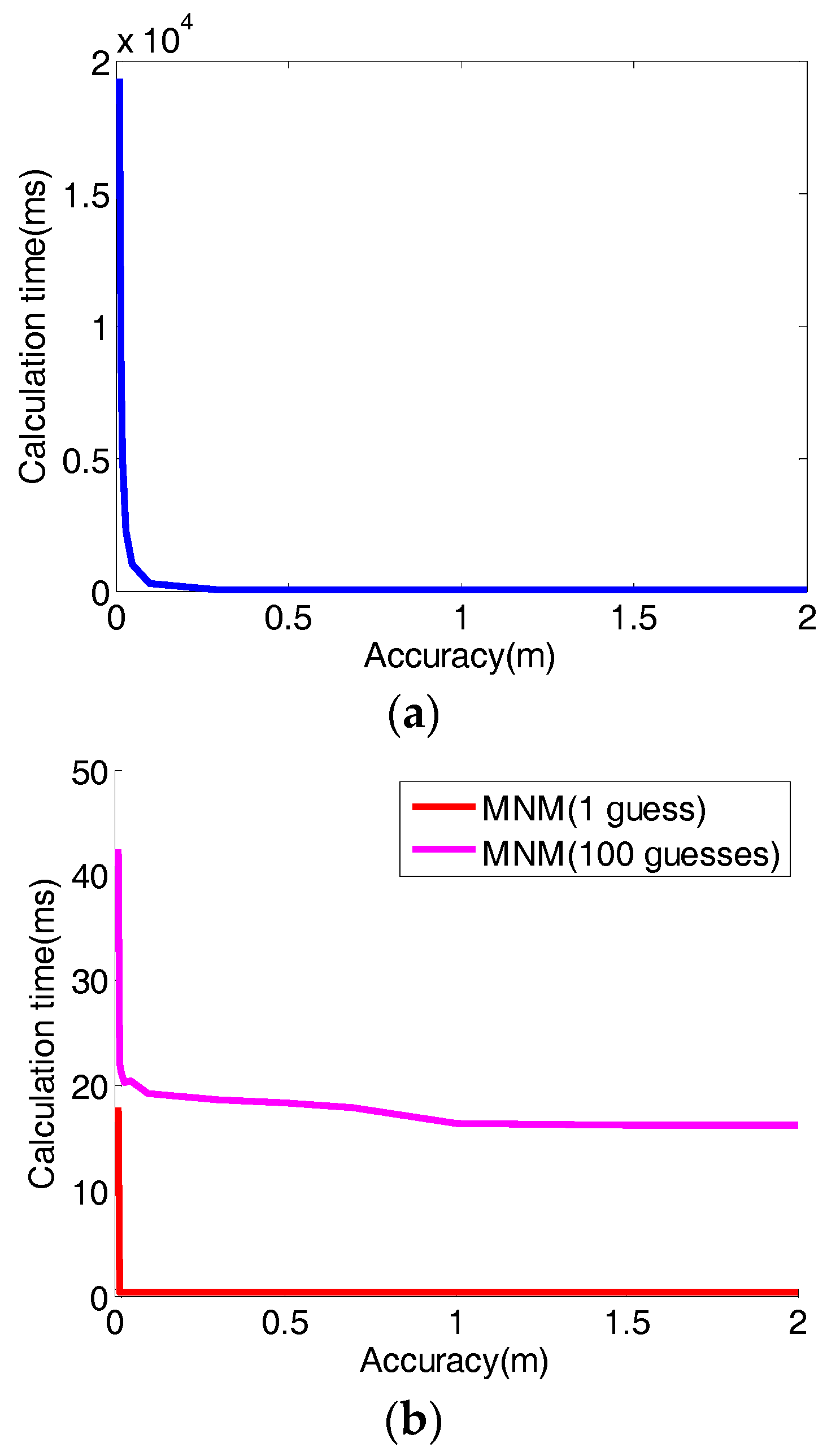
In addition to the difficulty associated with the detection of ‘global minimum,’ the calculation time of the Direction Search Method and the Modified Newton’s Method can be vastly different. When the accuracy is high, the direct search method’s calculation can be orders of magnitude more expensive than that of the Modified Newton’s Method, as shown in Table 2 and Figure 8. Furthermore, the comparison of 1 initial point and 100 initial points also can be observed in Table 2 and in Figure 8b. It is remarkable that for the case of accuracy = 0.01 m, when we use 100 initial guess points for the MNM, which is far more initial points than we really need, the computational time is only 1/454 of the time using Direct search method. It is noted that here the accuracy means the accuracy of the approximation of the function to be optimized.
3.3. Effect of Low-Quality Data
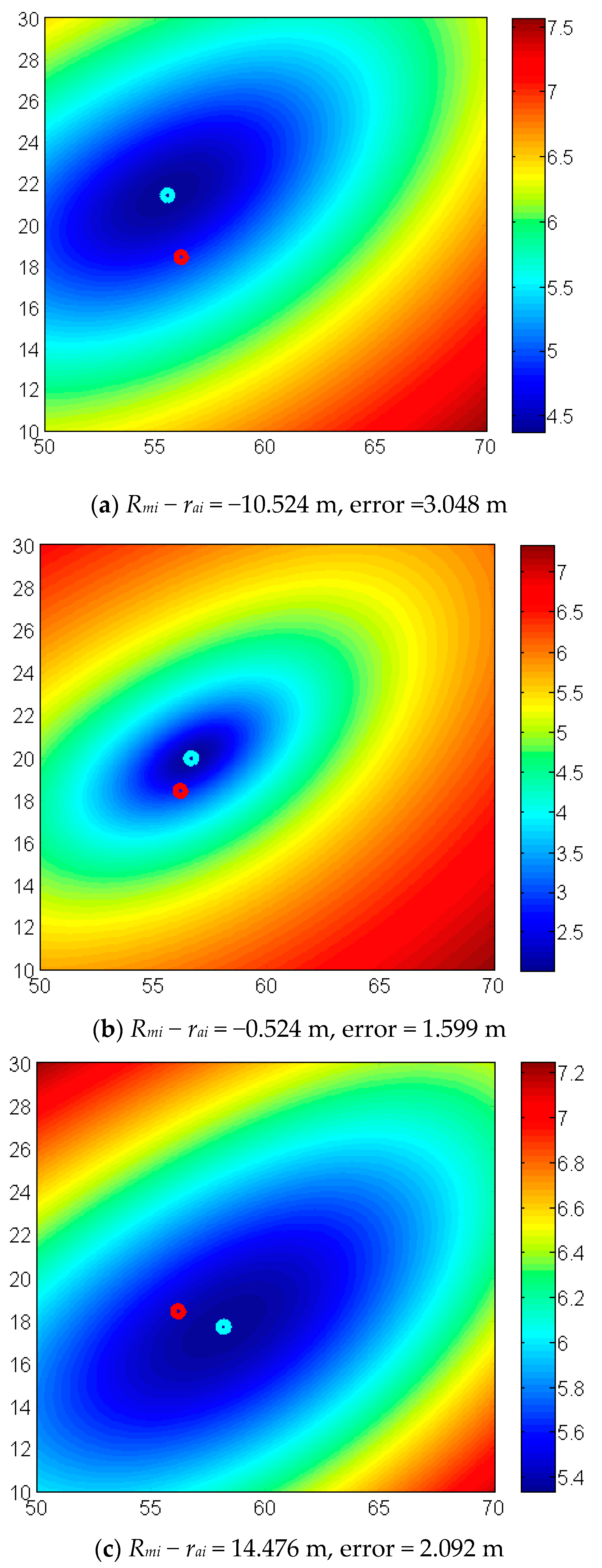
As we discussed above, the low-quality measurement can lead to inaccurate results. To demonstrate the effect of low quality data, we modified the measurement reported by station 7 in Table 1 to a series of different values ranging from 55 m to 80 m. Note that the actual distance from station 7 to the tag is 65.524 m. As shown in Figure 9, the red point is the actual location while the green point is the solution obtained by the proposed MNM. It is observed that the low quality data affects the localization in a manner depending upon the location and the error of all the measuring distances. In general, larger measurement error will lead to more inaccurate results.
3.4. Comparison of Modified Newton’s Method and traditional Newton’s Method
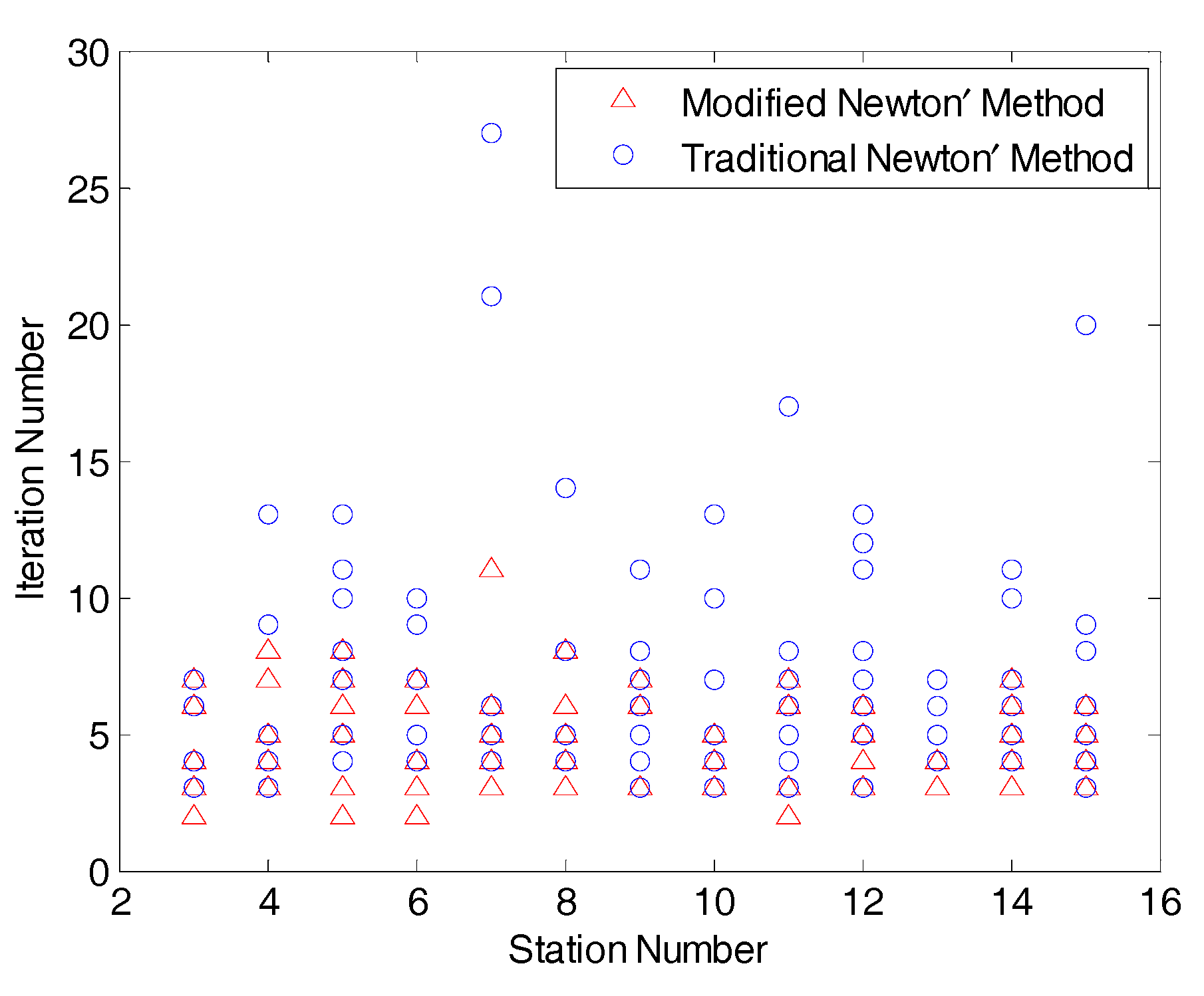
Even for the case that there is an easily identifiable ‘global minimum’ (that is, the solutions do not have closely spaced local minima), the MNM method, with a defined target area, can be vastly efficient. The target area allows us to select a better initial guess and thus the convergence process of the Modified Newton’s Method is much faster than traditional Newton’s method (where the initial value is randomly generated), as in [28]. To illustrate the efficiency, we generated large experimental data, where the number of the station ranged from 3 to 15. For each case of same number of stations, ten different layouts were randomly generated, to obtain altogether 130 configurations. The localization convergence (for accuracy to 0.001 m) results are shown in Figure 10. We can observe that the Modified Newton’s Method can be considerably faster than the traditional Newton’s method. The total iteration number for MNM are found to be at most only 70% of the traditional Newton’s Method.
3.5. An Indoor Localization Experiment
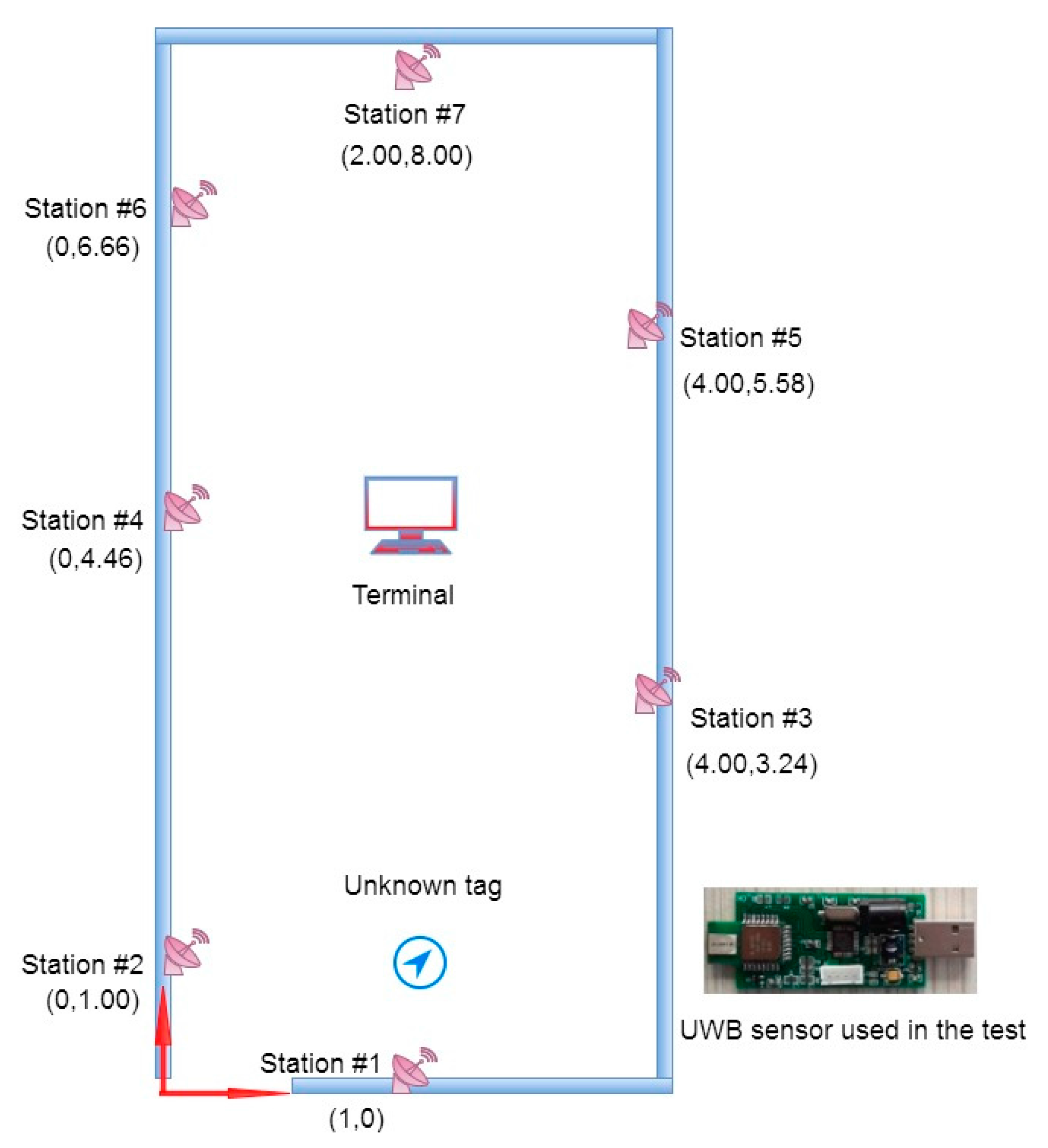
Recently, UWB technology has attracted lots of attention for indoor localization. We here use our localization tag and anchors based on an UWB transceiver. The experiment is carried in our lab, where the size is 8 m × 4 m. We installed seven anchors (stations) to determine the location (unknown tag), as shown in Figure 11. The measurement accuracy for the UWB has been reported to be 0.30 m [4]. In the measurements observed in our system, the variance of the measured distance was found to range from 0.04 m to 0.20 m based upon 500 repeats. In the algorithm, we take σi to be 0.3 m, as shown in Table 3.
The data used as input for the algorithm is listed in Table 3 In the self-correcting process, the measurement at station 6 was removed. The solution (2.11 m, 0.68 m) has 0.33 m error compared to the independently measured location (2.00 m, 1.00 m). Without the self-correcting process, the solution (2.21 m, 0.55 m) has an error of 0.49 m. This demonstrates the improved accuracy due to the presented algorithm.
4. Conclusions
In this paper, we provide a novel approach to efficiently solve the minimization of nonlinear localization equations. The approach can simultaneously eliminate the bad measurement data in range-based systems. The approach can be extended to constrained minimization problem with a predefined search domain. In this approach, a geometric intersection model was developed to narrow the target search area, where Newton’s Method and the Direct Search Method are used to search for the unknown position. Not only does the geometric intersection model offer a small bounded search domain for Newton’s Method and the Direct Search Method, but also it can self-correct the bad measurement data, which is particularly useful when dealing with large overdetermined systems. The Direct Search Method is useful for the coarse localization or small target search domain, while the Newton’s Method can be used for accurate localization. For accurate localization, by utilizing the proposed Modified Newton’s Method (MNM), challenges of avoiding the local extrema, singularities, and initial value choice are addressed. Through example calculations, the proposed model is shown to be robust, accurate and efficient. The applicability and robustness of the developed method has been demonstrated by experiments with an indoor UWB system. The proposed method can be used for accurate indoor and outdoor localization.
Acknowledgments
Shiping Huang is supported by State Key Lab of Subtropical Building Science, South China University of Technology and the Fundamental Research Funds for the Central Universities. Part of this work is funded by the Research Fund of The State Key Laboratory of Coal Resources and safe Mining, CUMT (12KF07).
Author Contributions
All authors contributed to the main idea of this paper. Shiping Huang, and Zhifeng Wu wrote the numerical algorithm. Shiping Huang and Anil Misra analyzed the experimental results. Shiping Huang and Anil Misra wrote the article.
Conflicts of Interest
The authors declare no conflict of interest.
Appendix A
The explicit form of Newton’s Method for Equation (3) in a 3D case is as given below:
where:
and:
Similarly, the explicit form of Newton’s Method for Equation (3) in 2D case is as below:
where:
References
- Thrun, S.; Fox, D.; Burgard, W.; Dellaert, F. Robust Monte Carlo localization for mobile robots. Artif. Intell. 2001, 128, 99–141. [Google Scholar] [CrossRef]
- Grimson, W.E.L.; Lozano-Perez, T. Model-based recognition and localization from sparse range or tactile data. Int. J. Robot. Res. 1984, 3, 3–35. [Google Scholar] [CrossRef]
- Drawil, N.M.; Amar, H.M.; Basir, O.A. GPS localization accuracy classification: A context-based approach. IEEE Trans. Intell. Trans. Syst. 2013, 14, 262–273. [Google Scholar] [CrossRef]
- Liu, H.; Darabi, H.; Banerjee, P.; Liu, J. Survey of wireless indoor positioning techniques and systems. IEEE Trans. Syst. Man Cybern. Part C 2007, 37, 1067–1080. [Google Scholar] [CrossRef]
- Corso, N.; Zakhor, A. Indoor localization algorithms for an ambulatory human operated 3D mobile mapping system. Remote Sens. 2013, 5, 6611–6646. [Google Scholar] [CrossRef]
- Qian, C.; Liu, H.; Tang, J.; Chen, Y.; Kaartinen, H.; Kukko, A.; Zhu, L.; Liang, X.; Chen, L.; Hyyppä, J. An integrated GNSS/INS/LIDAR-SLAM positioning method for highly accurate forest stem mapping. Remote Sens. 2016, 9, 3. [Google Scholar] [CrossRef]
- Wu, J.; Xu, Y.; Zhong, X.; Sun, Z.; Yang, J. A three-dimensional localization method for multistatic SAR based on numerical range-doppler algorithm and entropy minimization. Remote Sens. 2017, 9, 470. [Google Scholar] [CrossRef]
- Soldovieri, F.; Lopera, O.; Lambot, S. Combination of advanced inversion techniques for an accurate target localization via GPR for demining applications. IEEE Trans. Geosci. Remote Sens. 2011, 49, 451–461. [Google Scholar] [CrossRef]
- Bulusu, N.; Heidemann, J.; Estrin, D. GPS-less low-cost outdoor localization for very small devices. IEEE Pers. Commun. 2000, 7, 28–34. [Google Scholar] [CrossRef]
- Schipperijn, J.; Kerr, J.; Duncan, S.; Madsen, T.; Klinker, C.D.; Troelsen, J. Dynamic accuracy of GPS receivers for use in health research: A novel method to assess GPS accuracy in real-world settings. Emerg. Technol. Promot. Eval. Phys. Act. 2014, 23, 1–8. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Biswas, J.; Veloso, M.M. Wifi localization and navigation for autonomous indoor mobile robots. In Proceedings of the 2010 IEEE International Conference on Robotics and Automation (ICRA), Anchorage, AK, USA, 3–7 May 2010. [Google Scholar]
- Youssef, M.A.; Agrawala, A.; Shankar, A.U. Wlan location determination via clustering and probability distributions. In Proceedings of the First IEEE International Conference on Pervasive Computing and Communications, Fort Worth, TX, USA, 26 March 2003; pp. 143–150. [Google Scholar]
- Altini, M.; Brunelli, D.; Farella, E.; Benini, L. Bluetooth indoor localization with multiple neural networks. In Proceedings of the 2010 5th IEEE International Symposium on Wireless Pervasive Computing (ISWPC), Modena, Italy, 5–7 May 2010; pp. 295–300. [Google Scholar]
- Raghavan, A.N.; Ananthapadmanaban, H.; Sivamurugan, M.S.; Ravindran, B. Accurate mobile robot localization in indoor environments using bluetooth. In Proceedings of the 2010 IEEE International Conference on Robotics and Automation (ICRA), Anchorage, AK, USA, 3–7 May 2010; pp. 4391–4396. [Google Scholar]
- Huircán, J.I.; Muñoz, C.; Young, H.; Von Dossow, L.; Bustos, J.; Vivallo, G.; Toneatti, M. ZigBee-based wireless sensor network localization for cattle monitoring in grazing fields. Comput. Electron. Agric. 2010, 74, 258–264. [Google Scholar] [CrossRef]
- Cheon, J.; Hwang, H.; Kim, D.; Jung, Y. IEEE 802.15. 4 ZigBee-based time-of-arrival estimation for wireless sensor networks. Sensors 2016, 16, 203. [Google Scholar] [CrossRef] [PubMed]
- Medina, C.; Segura, J.C.; De la Torre, A. Ultrasound indoor positioning system based on a low-power wireless sensor network providing sub-centimeter accuracy. Sensors 2013, 13, 3501–3526. [Google Scholar] [CrossRef] [PubMed]
- Varshavsky, A.; De Lara, E.; Hightower, J.; LaMarca, A.; Otsason, V. GSM indoor localization. Pervasive Mob. Comput. 2007, 3, 698–720. [Google Scholar] [CrossRef]
- Cong, L.; Zhuang, W. Hybrid TDOA/AOA mobile user location for wideband cdma cellular systems. IEEE Trans. Wirel. Commun. 2002, 1, 439–447. [Google Scholar] [CrossRef]
- Yang, H.; Zhang, R.; Bordoy, J.; Höflinger, F.; Li, W.; Schindelhauer, C.; Reindl, L. Smartphone-based indoor localization system using inertial sensor and acoustic transmitter/receiver. IEEE Sens. J. 2016, 16, 8051–8061. [Google Scholar] [CrossRef]
- Jourdan, D.B.; Dardari, D.; Win, M.Z. Position error bound for uwb localization in dense cluttered environments. IEEE Trans. Aerosp. Electron. Syst. 2008, 44, 613–628. [Google Scholar] [CrossRef]
- Lee, J.-Y.; Scholtz, R.A. Ranging in a dense multipath environment using an UWB radio link. Sel. Areas Commun. IEEE J. 2002, 20, 1677–1683. [Google Scholar]
- Masiero, A.; Fissore, F.; Vettore, A. A low cost UWB based solution for direct georeferencing UAV photogrammetry. Remote Sens. 2017, 9, 414. [Google Scholar] [CrossRef]
- Chóliz, J.; Hernández, Á.; Valdovinos, A. A framework for UWB-based communication and location tracking systems for wireless sensor networks. Sensors 2011, 11, 9045–9068. [Google Scholar] [CrossRef] [PubMed]
- Dardari, D.; Conti, A.; Ferner, U.; Giorgetti, A.; Win, M.Z. Ranging with ultrawide bandwidth signals in multipath environments. Proc. IEEE 2009, 97, 404–426. [Google Scholar] [CrossRef]
- Jachimczyk, B.; Dziak, D.; Kulesza, W.J. Customization of UWB 3D-RTLS based on the new uncertainty model of the AoA ranging technique. Sensors 2017, 17, 227. [Google Scholar] [CrossRef] [PubMed]
- Patwari, N.; Hero, A.O., III. Using proximity and quantized RSS for sensor localization in wireless networks. In Proceedings of the 2nd ACM International Conference on Wireless Sensor Networks and Applications, San Diego, CA, USA, 19 September 2003; pp. 20–29. [Google Scholar]
- Foy, W.H. Position-location solutions by Taylor-series estimation. IEEE Trans. Aerosp. Electron. Syst. 1976, AES-12, 187–194. [Google Scholar] [CrossRef]
- Nguyen, T.L.; Shin, Y. Matrix completion optimization for localization in wireless sensor networks for intelligent IoT. Sensors 2016, 16, 722. [Google Scholar] [CrossRef] [PubMed]
- Leugner, S.; Pelka, M.; Hellbrück, H. Comparison of wired and wireless synchronization with clock drift compensation suited for U-TDoA localization. In Proceedings of the 2016 13th Workshop on Positioning, Navigation and Communications (WPNC), Bremen, Germany, 19–20 October 2016; pp. 1–4. [Google Scholar]
- Low, Z.; Cheong, J.; Law, C. Low-cost PCB antenna for UWB applications. IEEE Antennas Wirel. Propag. Lett. 2005, 4, 237–239. [Google Scholar] [CrossRef]
- Choi, S.H.; Park, J.K.; Kim, S.K.; Park, J.Y. A new ultra-wideband antenna for UWB applications. Microw. Opt. Technol. Lett. 2004, 40, 399–401. [Google Scholar] [CrossRef]
- Win, M.Z.; Scholtz, R.A. On the robustness of ultra-wide bandwidth signals in dense multipath environments. IEEE Commun. Lett. 1998, 2, 51–53. [Google Scholar] [CrossRef]
- Win, M.Z.; Scholtz, R.A. Characterization of ultra-wide bandwidth wireless indoor channels: A communication-theoretic view. IEEE J. Sel. Areas Commun. 2002, 20, 1613–1627. [Google Scholar] [CrossRef]
- Peyraud, S.; Bétaille, D.; Renault, S.; Ortiz, M.; Mougel, F.; Meizel, D.; Peyret, F. About non-line-of-sight satellite detection and exclusion in a 3D map-aided localization algorithm. Sensors 2013, 13, 829–847. [Google Scholar] [CrossRef] [PubMed]
- Müller, C.A.; Delande, D. Disorder and interference: Localization phenomena. arXiv, 2010; arXiv:1005.0915. [Google Scholar]
- Chan, Y.T.; Ho, K.C. A simple and efficient estimator for hyperbolic location. IEEE Trans. Signal Proc. 1994, 42, 1905–1915. [Google Scholar] [CrossRef]
- Kelley, C.T. Solving Nonlinear Equations with Newton’s Method; SIAM: Philadelphia, PA, USA, 2003. [Google Scholar]
- Yang, L.; Cao, J.; Yang, W. TDOA location based on modified newton method. In Proceedings of the 2016 IEEE 13th International Conference on Signal Processing (ICSP), Chengdu, China, 6–10 November 2016; pp. 1515–1518. [Google Scholar]
- Cota-Ruiz, J.; Rosiles, J.-G.; Rivas-Perea, P.; Sifuentes, E. A distributed localization algorithm for wireless sensor networks based on the solutions of spatially-constrained local problems. IEEE Sens. J. 2013, 13, 2181–2191. [Google Scholar] [CrossRef]
- Duff, I.S.; Erisman, A.M.; Reid, J.K. Direct Methods for Sparse Matrices; Oxford University Press: New York, NY, USA, 2017. [Google Scholar]
- Sasaki, T.; Murao, H. Efficient Gaussian elimination method for symbolic determinants and linear systems. ACM Trans. Math. Softw. 1982, 8, 277–289. [Google Scholar] [CrossRef]
- Misra, A.; Huang, S. Micromechanics based stress-displacement relationships of rough contacts: Numerical implementation under combined normal and shear loading. Comput. Model. Eng. Sci 2009, 52, 197–215. [Google Scholar]
- Huber, P.J. Robust Statistics; Springer: Hoboken, NY, USA, 2011. [Google Scholar]
- Lee, S.; Kim, E.; Kim, C.; Kim, K. Localization with a mobile beacon based on geometric constraints in wireless sensor networks. IEEE Trans. Wirel. Commun. 2009, 8, 5801–5805. [Google Scholar] [CrossRef]
- Cota-Ruiz, J.; Rosiles, J.-G.; Sifuentes, E.; Rivas-Perea, P. A low-complexity geometric bilateration method for localization in wireless sensor networks and its comparison with least-squares methods. Sensors 2012, 12, 839–862. [Google Scholar] [CrossRef] [PubMed]
- Li, X.; Hua, B.; Shang, Y.; Xiong, Y. A robust localization algorithm in wireless sensor networks. Front. Comput. Sci. China 2008, 2, 438–450. [Google Scholar] [CrossRef]
Figure 1.
The probability of P(rai − kσi < rmi < rai + kσi) with different k.

Figure 2.
The intersection process: (a) circle case, (b) square case.

Figure 3.
Iteration process of the square intersection.

Figure 4.
The probability of P(rmi < rai − kσi) with different k and n.

Figure 5.
Flowchart of the computational algorithm.

Figure 6.
Layout of the station and initial search points (in m): (a) single initial guess, (b) 16 initial guesses.
Figure 6.
Layout of the station and initial search points (in m): (a) single initial guess, (b) 16 initial guesses.

Figure 7.
The contour of the logarithm of Equation (1) and the target area (in m): (a) contour of 200 m × 200 m square domain, (b) contour of 70 m × 45 m square domain.
Figure 7.
The contour of the logarithm of Equation (1) and the target area (in m): (a) contour of 200 m × 200 m square domain, (b) contour of 70 m × 45 m square domain.

Figure 8.
Computation time using different models: (a) Direct Search Model (DSM), (b) Modified Newton’s Method (MNM).
Figure 8.
Computation time using different models: (a) Direct Search Model (DSM), (b) Modified Newton’s Method (MNM).

Figure 9.
The contour of the logarithm of Equation (1) with different fluctuation of measurements (form 55 m to 80 m) in station #7. The error in (a–c) refers to location error.
Figure 9.
The contour of the logarithm of Equation (1) with different fluctuation of measurements (form 55 m to 80 m) in station #7. The error in (a–c) refers to location error.

Figure 10.
Comparison of maximum iteration between Modified Newton’s Method and traditional Newton’s Method for different stations.
Figure 10.
Comparison of maximum iteration between Modified Newton’s Method and traditional Newton’s Method for different stations.

Figure 11.
The experimental design.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 1.
The base station coordinate and distance measurement to the tag (k = 2.5, P = 96%, σi = 1 m).
Table 1.
The base station coordinate and distance measurement to the tag (k = 2.5, P = 96%, σi = 1 m).
| Station, n | 1 | 2 | 3 | 4 | 5 | 6 | 7 |
|---|---|---|---|---|---|---|---|
| Coordinate xi (m) | 17.812 | 35.963 | 5.670 | 52.189 | 33.585 | 17.567 | 20.895 |
| Coordinate yi (m) | 90.515 | 67.539 | 46.847 | 91.213 | 10.401 | 74.555 | 73.627 |
| measurement rmi (m) | 82.159 | 52.119 | 56.136 | 71.467 | 25.956 | 65.994 | 64.236 |
| measurement errors (m) | 0.486 | 1.000 | 1.829 | 1.437 | 1.975 | 2.143 | 1.288 |
Table 2.
The calculation time (ms) using different methods (k = 2.5, P = 96%, σi = 1 m).
| Accuracy (m) | 0.01 | 0.015 | 0.02 | 0.03 | 0.05 | 0.1 | 0.3 | 0.5 | 0.7 | 1 | 1.5 | 2 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| DSM time | 19309 | 8570 | 4954 | 2274 | 975 | 282 | 26.04 | 8.96 | 4.20 | 2.05 | 0.93 | 0.56 |
| MNM time (initial guess = 1) | 17.96 | 0.44 | 0.42 | 0.41 | 0.40 | 0.40 | 0.39 | 0.37 | 0.36 | 0.39 | 0.36 | 0.32 |
| MNM (initial guesses = 100) | 42.47 | 22.02 | 21.14 | 20.32 | 20.47 | 19.26 | 18.61 | 25.33 | 17.88 | 16.32 | 16.29 | 16.26 |
Table 3.
The experimental data for the indoor experiment (k = 2.5, P = 96%, σi = 0.3 m).
| Station, n | 1 | 2 | 3 | 4 | 5 | 6 | 7 |
|---|---|---|---|---|---|---|---|
| Coordinate xi (m) | 2.00 | 0.00 | 4.00 | 0.00 | 4.00 | 0.00 | 2.00 |
| Coordinate yi (m) | 0.00 | 1.00 | 3.24 | 4.46 | 5.58 | 6.66 | 8.00 |
| Measurement rmi (m) | 1.22 | 2.12 | 3.25 | 4.36 | 5.39 | 7.01 | 7.62 |
| Actual distance (m) | 1.00 | 2.00 | 3.01 | 4.00 | 5.00 | 5.98 | 6.99 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Huang, S.; Wu, Z.; Misra, A. A Practical, Robust and Fast Method for Location Localization in Range-Based Systems. Sensors 2017, 17, 2869. https://doi.org/10.3390/s17122869
AMA Style
Huang S, Wu Z, Misra A. A Practical, Robust and Fast Method for Location Localization in Range-Based Systems. Sensors. 2017; 17(12):2869. https://doi.org/10.3390/s17122869
Chicago/Turabian StyleHuang, Shiping, Zhifeng Wu, and Anil Misra. 2017. "A Practical, Robust and Fast Method for Location Localization in Range-Based Systems" Sensors 17, no. 12: 2869. https://doi.org/10.3390/s17122869
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.